基于3D GIS和北斗高精定位的無人機鐵路智能巡檢技術研究與應用
2024-08-17 00:00:00趙強
數字通信世界 2024年7期

摘要:隨著鐵路運輸在國民經濟中的重要性日益凸顯,鐵路系統的安全運營和高效維護成為了關鍵問題。傳統的鐵路巡檢方法存在效率低下和成本高昂的缺陷,迫切需要技術創(chuàng)新來提升監(jiān)測能力和降低維護成本。該文提出了一種基于3D GIS和北斗高精定位的無人機鐵路智能巡檢技術,該技術借助無人機的靈活性和其搭載的高精度傳感器,結合3D GIS的三維可視化和北斗系統的精確定位,可實現對鐵路線路的高效、精確巡檢。
關鍵詞:無人機;智能巡檢;3DGIS;北斗定位
doi:10.3969/J.ISSN.1672-7274.2024.07.056
中圖分類號:TN 96;TP 391.9;V 279+.2 文獻標志碼:A 文章編碼:1672-7274(2024)07-0-03
Research and Application of Unmanned Aerial Vehicle Intelligent Railway Inspection Technology Based on 3D GIS and Beidou High-precision Positioning
ZHAO Qiang
(Beijing Quanlu Communication and Signal Research and Design Institute Group Co., Ltd., Beijing 100070, China)
Abstract: With the increasing importance of railway transportation in the national economy, the safe operation and efficient maintenance of railway 54a63d4551d9e0f56595f8a163dc6427systems have become key issues. The traditional railway inspection methods have shortcomings of low efficiency and high cost, and there is an urgent need for technological innovation to improve monitoring capabilities and reduce maintenance costs. This article proposes an unmanned aerial vehicle (UAV) intelligent railway inspection technology based on 3D GIS and high-precision positioning of BeiDou. This technology utilizes the flexibility of UAVs and their high-precision sensors, combined with the 3D visualization of 3D GIS and the precise positioning of BeiDou system, to achieve efficient and accurate inspection of railway lines.
Keywords: drones; intelligent inspection; 3DGIS; Beidou positioning
1 無人機鐵路智能巡檢技術的研究意義
鐵路系統作為國家重要基礎設施,保障其運營安全和提高運營效率對促進國民經濟發(fā)展具有重要意義。然而,當前鐵路系統在安全風險監(jiān)測和維護方面存在一定的技術瓶頸[1-3],需要通過技術創(chuàng)新,提升鐵路系統的監(jiān)測能力,降低維護成本,增強鐵路線網的穩(wěn)定性和可靠性。智能無人機巡檢不僅可充分發(fā)揮無人機的靈活性和可達性,提供從空中角度的鐵路監(jiān)測,同時通過搭載高精度北斗導航系統,可實現對鐵路沿線精確的位置定位與實時監(jiān)控,對于確保鐵路運輸的穩(wěn)定性和連續(xù)性具有極其重要的意義。
2 3D GIS技術和北斗高精定位技術應用
于無人機鐵路智能巡檢的基本原理
2.1 3D GIS技術
三維地理信息系統(3D GIS)是一種集成了傳統二維GIS與三維建模技術的先進信息系統[4-5]。這種技術通過創(chuàng)建一個接近現實的三維虛擬環(huán)境,可以用于模擬、分析和可視化地理空間數據。在鐵路智能巡檢中,3D GIS能夠提供鐵路線路及其周邊環(huán)境的精確三維模型,為無人機的飛行路徑規(guī)劃、障礙物規(guī)避和巡檢區(qū)域的三維可視化提供強有力的支持[6]。
2.2 北斗高精導航技術
北斗衛(wèi)星導航系統(BDS)是中國自主研發(fā)的全球衛(wèi)星導航系統,可提供全球范圍內的定位、導航、授時服務[7-8]。北斗系統的高精度定位功能對于無人機航飛巡檢至關重要,它能夠確保無人機在執(zhí)行巡檢任務時的精確制導,以及對巡檢數據的精確地理標記。
2.3 應用原理
在無人機航飛巡檢中,3D GIS技術和北斗高精導航技術的結合為無人機提供了一個精確、安全的飛行環(huán)境。首先,3D GIS技術根據無人機的飛行性能和巡檢需求,結合鐵路線路及其周邊環(huán)境的三維模型,為無人機生成一條最優(yōu)的飛行路徑。其次,北斗高精導航技術為無人機提供了實時的高精度定位信息,使無人機能夠嚴格按照預定路徑飛行,即使在GPS信號微弱或受阻的環(huán)境中也能保持精確導航。此外,北斗系統的時間戳功能能夠為無人機拍攝的影像和收集的數據提供精確的時間標記,這對于后續(xù)的數據同步和分析至關重要。
3 智能無人機巡檢的實現方案
3.1 前期硬件準備
在進行航飛巡檢作業(yè)前,需要完成固定機場的設備部署及固定機場相關的設備布置。其操作主要包含以下6個步驟:
(1)設備部署。使用前確認固定機場內電池槽內至少有一組電池、至多3組,安裝固定機場配套的無人機鞋套,并加裝機載端控制盒。
(2)安裝無人機遙控器。若需要更換無人機遙控器,需要將無人機遙控器固定在桅桿背部靠上位置。固定步驟如下:
①拆下遙控器放置板。
圖1 桅桿上部實物圖
如圖1所示,桅桿內的上部位置設有一個遙控器放置板,遙控器放置板兩端設有4個M4固定螺絲。
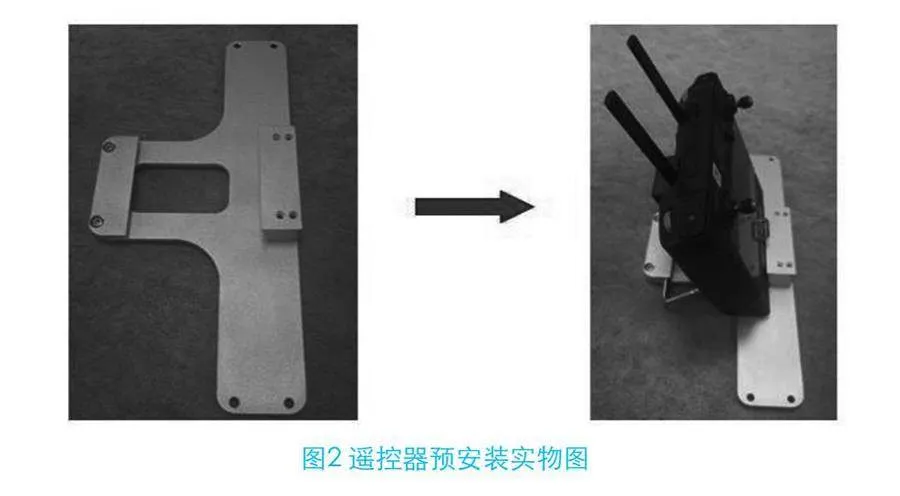
②將遙控器固定至遙控器放置板上。
將遙控器如圖2所示卡入遙控器放置板上,初步固定遙控器。
圖2 遙控器預安裝實物圖
③將遙控器拖板安裝至桅桿內將裝有遙控器的遙控器放置板,通過兩端的4個M4螺絲固定至桅桿上,并將上圖中的遙控器充電口與數據口,分別插至遙控器的充電接口與數據口上。
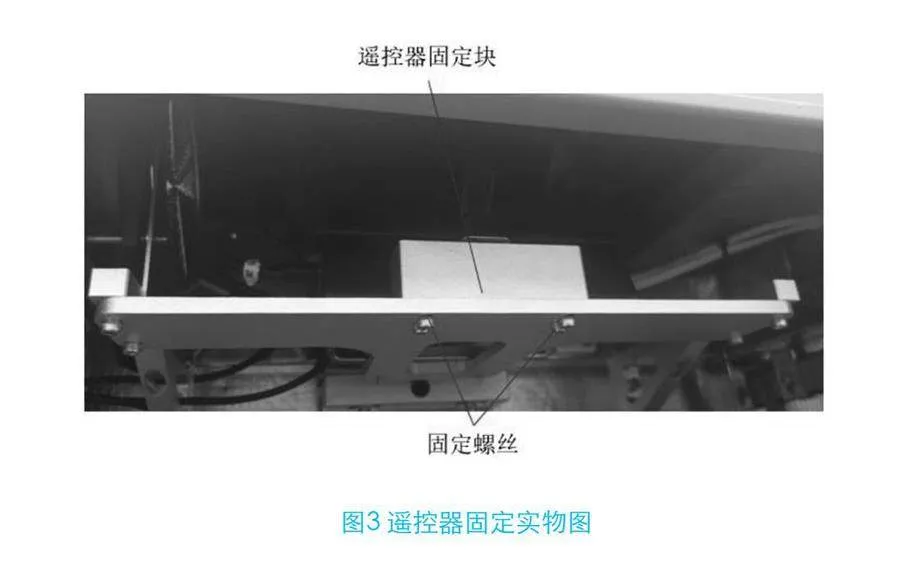
最后,將遙控器固定塊貼緊遙控器,并緊固遙控器固定塊下方的固定螺絲。至此,遙控器安裝完畢,如圖3所示。
圖3 遙控器固定實物圖
(3)設備上電。固定機場內置有不間斷電源,并配有蓄電池,可保證外部供電異常時,固定機場的正常運行。
(4)打開固定機場。使用固定機場上的HMI控制面板打開機場。
(5)無人機放置。機場本體處于已打開狀態(tài)下,將無人機放置于機場起降平臺上。完成后,復位機場。
(6)機場復位并切換為遠程控制模式。按下固定機場上方的急停按鈕,觀察到機場三色狀態(tài)燈變?yōu)榧t色,機場停止所有機械運動,進入急停狀態(tài),點擊開關開啟遠程控制模式。
3.2 遠程執(zhí)行巡檢任務。
完成相關硬件部署及配置后,便可利用智能巡檢管控平臺遠程下發(fā)任務,指派固定機場執(zhí)行巡檢任務。其主要包含以下5個步驟:
(1)登錄智能巡檢管控平臺。執(zhí)行無人機巡檢任務的首要步驟是操作人員通過安全的網絡連接登錄到智能巡檢管控平臺。該平臺是整個巡檢任務的指揮中心,負責任務的下發(fā)、監(jiān)控和數據管理。
(2)創(chuàng)建巡檢數據。創(chuàng)建巡檢數據這一步驟涉及輸入和確認無人機巡檢任務所需的所有參數,包括巡檢區(qū)域的地理信息、預期的飛行高度、速度、相機參數設置以及其他巡檢相關的細節(jié)。
(3)創(chuàng)建、下發(fā)巡檢計劃。操作人員需在平臺上定義巡檢任務的時間、路徑和參數,然后生成巡檢計劃。該計劃包括飛行航線的規(guī)劃、預計的飛行時間和關鍵的檢查點。計劃制定完成后,通過平臺下發(fā)至固定機場的無人機系統,無人機接收到任務指令后,將準備執(zhí)行巡檢任務。
(4)巡檢計劃執(zhí)行及狀況監(jiān)控。操作人員可以通過平臺的界面實時接收無人機傳回的影像數據和傳感器信息,同時監(jiān)控無人機的飛行路徑、速度、高度和電池狀態(tài)等關鍵參數。
(5)巡檢結果查看、下載。智能巡檢管控平臺將同步無人機在巡檢過程中收集的所有數據,包括高清影像、傳感器檢測結果和飛行日志等。操作人員可以在平臺上查看巡檢結果,進行初步分析,并根據需要下載相關數據。
4 智能無人機巡檢的關鍵技術
(1)北斗高精定位集成:集成北斗高精度定位系統于無人機,為機載檢測設備提供精準的地理位置數據,支撐精確的飛行導航和作業(yè)定位,特別是在復雜的鐵路環(huán)境中。
(2)多元傳感器同步:利用北斗定位精準同步雷達、紅外傳感器與電磁感應等設備,提高傳感數據的準確性與實用性,確保數據采集的高質量執(zhí)行。
(3)智能調度算法:采用基于北斗數據的智能調度算法,實現機群的高效作業(yè)規(guī)劃與任務分配,增強復雜場景下的應急響應能力。
(4)云端實時數據交流與位置同步:利用北斗系統實現無人機機群之間及與地面控制中心的云端實時數據交流和位置同步服務,保證任務執(zhí)行過程中的協同與同步精準。
5 智能無人機巡檢技術的應用價值和可
推廣性
5.1 應用價值
智能無人機鐵路航飛巡檢技術可以顯著提升鐵路線路監(jiān)測的效率和質量,同時降低人力成本和安全風險。無人機的高機動性和搭載的高精度傳感器,使其能夠快速覆蓋廣闊區(qū)域,對鐵路線路進行細致的檢查,及時發(fā)現并診斷潛在的結構問題和安全隱患。通過智能分析系統,無人機收集的大量數據可以轉化為科學的決策支持,優(yōu)化鐵路線路的維護計劃和提升服務水平。
5.2 可推廣性
智能無人機鐵路航飛巡檢技術不僅適用于鐵路行業(yè),還可以擴展至其他交通基礎設施的監(jiān)測領域,如城市軌道交通、高速公路、橋梁和隧道等。無人機的環(huán)境適應性強,能夠在各種地形和氣候條件下執(zhí)行任務,使其在全球范圍內具有廣泛的應用前景。此外,無人機技術可以根據不同的應用場景定制開發(fā),滿足城市規(guī)劃、農業(yè)監(jiān)測、環(huán)境保護等多樣化需求。
6 結束語
本文對基于3D GIS和北斗高精定位的無人機鐵路智能巡檢技術進行了深入研究,展示了其在鐵路系統監(jiān)測和維護中的應用潛力。通過無人機航飛巡檢技術,不僅提高了鐵路線路的巡檢效率和安全性,而且降低了人力成本和安全風險,為提升鐵路系統的智能化和自動化水平提供了強有力的技術支持。未來,相關研究應致力于技術的迭代與設備升級,包括跨領域技術融合,如將人工智能與機器學習技術應用于北斗高精定位系統,以提升無人機機載檢測設備的智能識別與處理能力。
參考文獻
[1] 牛道安,劉金朝,楊飛,等.高速鐵路基礎設施檢測監(jiān)測大數據分析技術研究與實踐[J].中國鐵路,2024(2):1-11.
[2] 蔡軍.重載鐵路公專網車-地通信監(jiān)測技術研究[J].鐵路通信信號工程技術,2024,21(2):48-53.
[3] Witlox F, Zwanikken T, Jehee L, et al. Changing tracks: identifying and tackling bottlenecks in European rail passenger transport[J]. European Transport Research Review,2022, 14(1): 7.
[4] 倪葦,許興旺,張坤.基于開源3DGIS引擎的鐵路工程BIM建造數字化平臺應用研究[J].鐵路技術創(chuàng)新,2023(4):79-83.
[5]李序安.工程測量中的三維GIS技術分析[J].信息系統工程,2023(7):39-42.
[6] Zlatanova S, Rahman A A, Pilouk M. Trends in 3D GIS development[J]. Journal of Geospatial Engineering, 2002, 4(2): 71-80.
[7] Yang Y, Gao W, Guo S, et al. Introduction to BeiDou‐3 navigation satellite system[J]. Navigation, 2019, 66(1): 7-18.
[8] Han C, Yang Y, Cai Z. BeiDou navigation satellite system and its time scales[J]. Metrologia, 2011, 48(4): S213.