基于數字孿生的磁懸浮織針監控研究與應用
2024-05-17 09:37:34許章汛張弛李紅軍張成俊王軍
紡織工程學報 2024年1期
關鍵詞:可視化
許章汛 張弛 李紅軍 張成俊 王軍


摘 要:針對磁懸浮針織設備織針運行速度快、故障難檢測的特點,提出了一種基于數字孿生的磁懸浮織針監控系統架構,旨在實時監測磁懸浮針織設備,特別是織針的運行狀態。該系統架構采樣數字孿生五維模型為基礎,對磁懸浮針織設備在該模型中的構成要素進行了深入分析。進而,詳細闡述了在此監控架構中虛擬實體的開發、孿生數據的采集以及織針故障診斷等關鍵技術。最后,依托所提架構,針對一種新型管式磁懸浮針織圓緯機設備開發一套在線監控系統,并通過實際應用驗證了所提架構的有效性。
關鍵詞:數字孿生;可視化;監控;磁懸浮織針;針織圓緯機
中圖分類號:TP391?? 文獻標志碼:A? 文章編號:2097-2911-(2024)01-0080-10
Research and Application of Magnetic Levitation WeavingNeedle Monitoring Based on Digital Twin Technology
XU Zhangxun, ZHANG Chi, LI Hongjun, ZHANG Chengjun, WANG Jun
(School of Mechanical Engineering And Automation; Hubei Provincial Key Laboratory of Digital Textile Equipment,Wuhan Textile University, Wuhan 430073, China; Hubei Engineering Research Center of Industrial Detonator IntelligentAssembly, Wuhan 430200, China)
Abstract:In response to the high operational speeds and the difficulty of fault detection in magnetic levitation knitting machinery, a monitoring system architecture for magnetic levitation knitting needles based on digital twin technology is proposed. This system is designed for the real-time monitoring of magnetic levitation knit- ting equipment, with a particular focus on the operational status of the knitting needles. The architecture is grounded in the five-dimensional model of digital twins, with a comprehensive analysis of the components of magnetic levitation knitting equipment within this model. Additionally, the paper delves into the development of the virtual entities, the collection of twin data, and the key technologies for diagnosing needle faults within this monitoring framework. Finally, leveraging the proposed architecture, an online monitoring system was devel- oped for a novel tubular magnetic levitation circular weft knitting machine, and its effectiveness was substantiat- ed through practical application.
Keywords:digital twin; visualization; monitoring; magnetic levitation weaving needle; circular knitting ma- chine
針織圓緯機是紡織工業中的關鍵裝備,近年來已實現高速化與高效化的發展。目前市場普遍采用的是傳統機械傳動針織圓緯機,但是由于織針在運行過程中受到的剛性沖擊和機械摩擦等因素,織針的運行速度很難進一步提升。為了克服機械傳動的固有問題,國內學者結合磁懸浮技術展開了以磁力驅動織針的相關研究。其中,武漢紡織大學的吳曉光、張弛教授團隊[1-4]提出了多種磁懸浮織針方案,在一定程度上解決了機械傳動對高速織針發展的限制。作為一種新式的技術方案,磁懸浮織針具有高速傳動、超細密等特點,織針的運行狀態很難被監控。隨著“中國智能制造2025”和《紡織行業“十四五”發展綱要》等國家發展戰略的提出,智能制造已經成為推動中國制造業轉型升級的核心動力。推動工業生產從自動化向智能化發展,保障設備的穩定高效運行,提高設備的生產效率,具有重要意義。因此,針對磁懸浮織針建立在線監控系統的重要性日益凸顯。
數字孿生(Digital Twin, DT)技術的概念最早可追溯到2002年,由美國學者 GRIEVES在其產品全生命周期管理的相關研究[5]中提出, GRIEVES 教授提出了一種由真實空間、虛擬空間和用于連接二者的數據組成的“鏡像空間模型”。2006年,該模型被更名為“信息鏡像模型”,后者更強調真實空間和虛擬空間之間的雙向交互性[6]。2010年,NASA的技術路線圖中首次出現了“數字孿生”這一術語[7]。隨后,美國空軍開始利用數字孿生技術研究戰斗機,以預測飛機結構中的疲勞和裂縫[8]。2014年,GRIEVES正式定義了由物理實體、虛擬實體和二者的數據交互組成的數字孿生三維模型。2019年,國內學者陶飛等人[9]進一步提出數字孿生五維模型以滿足更復雜的應用需求,并針對不同領域的應用提出了具體的實施策略。2021年,張辰源等人[10]針對數字孿生模型的質量、性能等方面難以分析和量化的問題,提出了一套數字孿生模型評價指標體系。得益于物聯網、人工智能、大數據、邊緣計算、5G 通訊等新一代信息技術迅速發展,數字孿生技術不僅在理論層面取得了進展,也在諸如航空航天、醫療、船舶、城市管理、電力、汽車、采礦等領域[11-18] 得到了廣泛應用。
通過深入分析數字孿生技術的理論基礎與應用實踐,該技術利用數字化的方式將物理實體映射到虛擬模型中,構建具有多維度、多時空特性的信息模型,用以描述和仿真物理實體的狀態、屬性和行為[9, 19]。數字孿生技術為缺乏實時監控的針織設備提供了一種潛在的創新解決方案。本課題組結合數字孿生技術曾提出一種針對磁懸浮針織設備監控方案[20],但是該方案主要針對舊式設備展開的相關研究,隨著對磁懸浮針織技術研究的進展加深,上述方案很難滿足現有需求。因此,本文將依托數字孿生技術,構建了一種針對磁懸浮針織圓緯機的可視化實時監控架構,并通過實際應用案例驗證該架構的有效性。
1 磁懸浮織針數字孿生框架
數字孿生通過在信息空間中建立物理實體的虛擬映射,利用虛擬模型、運行數據、歷史數據等建立反映物理實體運行狀態的數字化模型,完成對物理實體全生命周期的監控。經過數年的發展,數字孿生模型從三維模型被擴充為五維模型[9],具體包含:物理實體、虛擬實體、服務、孿生數據以及各組成部分之間的連接。圖1為本研究基于數字孿生五維模型,建立磁懸浮織針數字孿生模型框架。
物理實體主要指磁懸浮針織圓緯機,其中的針筒、沉降片、織針等是本系統監控的重點部位,也是整個研究的載體。虛擬實體是指在信息世界對物理實體的多維度映射,包括幾何模型、物理模型、行為模型和規則模型。幾何模型描述磁懸浮織針及其附屬構件的幾何位置、尺寸、形狀以及它們互相之間的裝配關系。物理模型反映通電線圈的磁場變化以及織針在磁場中的受力等。行為模型描述磁懸浮織針在不同時空尺度下,響應內外部變化的物理行為。規則模型則主要描述對磁懸浮織針實時運行狀態進行判斷的規則。
孿生數據包括實時運行數據(磁懸浮織針的質量、運行速度和位置等)、歷史運行數據、服務數據(算法、模型等)。連接則是實現磁懸浮織針監控平臺各部分互聯互通的關鍵,包括物理實體與虛擬實體之間的雙向交互、孿生數據的采集與應用等。服務則是磁懸浮織針監控平臺各種功能模塊的封裝,在本研究中,主要體現在虛擬實體的三維展示、虛擬實體與物理實體的雙向交互、物理實體實時狀態展示、磁懸浮織針運行數據展示等。
2 磁懸浮織針監控系統構建
2.1 虛擬實體構建
2.1.1 選擇虛擬實體構建平臺
為滿足磁懸浮織針監控系統的具體需求,本研究旨在構建一個高保真的虛擬模型。為此需要選擇一個合適的三維軟件平臺。
目前,用于開發數字孿生的三維軟件平臺沒有統一的標準,其技術選擇多樣化:一些開發者傾向于使用底層圖形接口(如 OpenGL[21]),另一些則選擇游戲引擎技術(如 Unity 3D[22]、Unreal Engine[23]),還有一部分使用集成解決方案(例如 Tecnomatix[24]、ANSYS-Twin Builder等[25])。這些構建方法各有千秋:直接利用底層圖形接口進行開發可以實現模型的深度優化,開發的靈活性和自由的是幾種方式中最高的,但這通常要求開發者具備較高的圖形編程技能,并且也需要更長的開發周期;采用集成解決方案則能夠大大簡化開發流程,利用軟件封裝好的功能,在不編寫代碼的情況下,通常就能完成虛擬實體的構建,但這也限制了開發的靈活性,難以滿足定制化的需求,且使用這種方式需要購買專門的軟件,使用成本較高。
相較之下,游戲引擎為數字孿生虛擬實體構建提供了更好的解決方案。當前的主流游戲引擎,如Unity 3D 和Unreal Engine,已經內嵌了完備的物理系統,通過簡單的定義,就能實現對物理世界的模擬。在圖像渲染方面,游戲引擎的擁有高保真的渲染能力。同時,通過利用引擎提供的腳本化開發方式,能夠對虛擬實體快速進行運動學規劃,可實現虛擬實體的高度定制化。在上述兩大游戲引擎中,本文選擇Unity 3D作為虛擬實體的構建平臺。該引擎有優秀的跨平臺部署能力,廣泛支持從桌面操作系統到移動平臺等各類系統環境;強大的實時預覽和交互式編輯功能,使開發者能夠快速、精細的調整場景的視覺效果。
2.1.2 虛擬實體構建流程
首先,收集建模對象的圖紙信息,使用 Solid- Works 軟件進行物理實體的三維建模工作。這一步主要目標是創建包含詳細尺寸、幾何形狀和裝配關系的幾何模型,為構建虛擬實體奠定基礎。SolidWorks構建模型的復雜度高,意味著生成的模型往往包含大量的頂點和面片,這在后續的虛擬實體實時渲染過程中,對計算資源提出了較高的要求。
為了優化模型并降低對計算資源的需求,可通過將 SolidWorks 構建的復雜模型導入到3ds Max 進行輕量化處理。這一步將在保持外觀和結構的精確性的同時,減少模型的頂點和面片數量,保證模型的高效渲染。
輕量化處理之后,需要在3ds Max中將模型導出成 Unity 3D 兼容的 FBX 格式,并將其導入 Unity 3D中進行進一步的處理。在Unity 3D中,可以給不同的對象添加組件以實現豐富的功能。例如,為磁懸浮織針添加Rigidbody組件,利用該組件,可以定義織針的質量,也可以使織針參與復雜的動力學計算,實現對真實物理行為的模擬。也可為不同組件添加 Collider組件,這是一個碰撞器組件,能夠檢測碰撞事件,在織針運動過程中異常碰撞的其他對象時,及時觸發相應的警告機制。
2.2 孿生數據
孿生數據構成數字孿生五維模型的核心要素,同時也是磁懸浮織針監控系統的基礎。孿生數據涵蓋了從設備狀態到環境條件,以及生產過程中產生的實時數據等多維度的客觀要素。考慮到設備組成的復雜性,若采用逐一采集的方式,將涉及到包括 Modbus、RS-485、PROFINET 和TCP等多種通訊協議,將大大增加數據采集難度,并且也很難保證數據的實時性和同步性。因此,本研究采用 OPC UA(Open Platform Commu- nications Unified Architecture)協議實現對磁懸浮織針監控系統中多源異構數據的統一建模,確保數據采集、傳遞、訪問的一致性。
根據系統需求,孿生數據的數據架構被分為感知層、傳輸層和應用層三個層次。在感知層,通過PLC和各種傳感器技術,實現采集設備的實時運行數據,獲取精確的設備狀態信息。傳輸層中,利用OPC UA的信息模型對采集的多源異構數據進行封裝,建立統一的信息模型。應用層中,通過 OPC UA客戶端和服務器的交互,實現對標準化信息模型的孿生數據統一訪問,并基于感知層和傳輸層的支持,保證虛擬實體與物理實體的一致性。
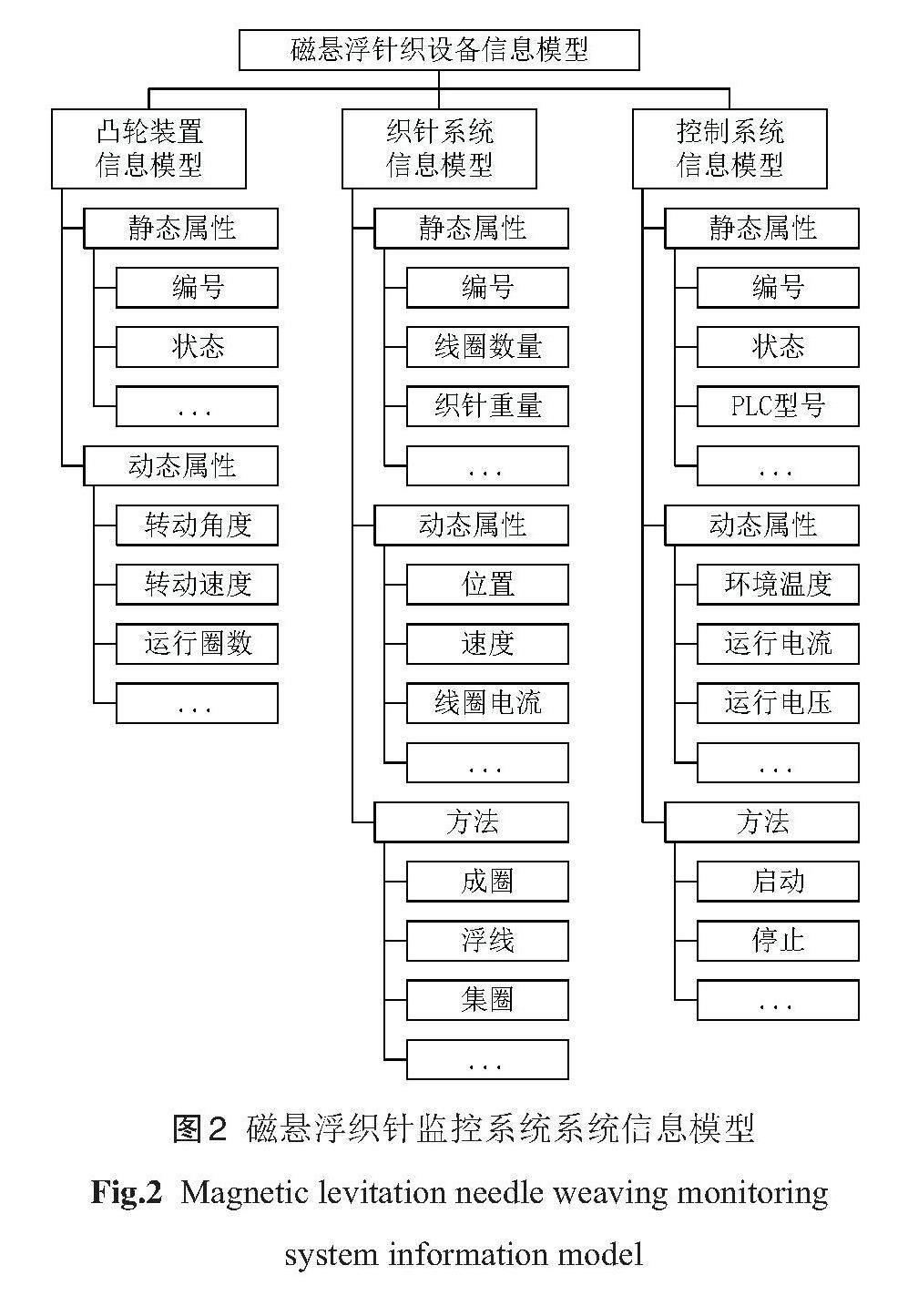
圖2為磁懸浮織針監控系統信息模型,將其劃分為凸輪裝置、織針系統、控制系統三個子系統,各子系統包含靜態屬性集、過程屬性集和方法集。其中靜態屬性集是設備固有的靜態數據,如編號、名稱等信息。過程屬性集是設備運行過程中動態變化的數據,如織針的速度、位置等信息。方法集則是子系統能夠執行的功能。
以織針系統信息模型為例,其用靜態屬性集、動態屬性集和方法集組成,靜態屬性集中,包含了織針的固有屬性,如織針的編號、線圈的纏繞數量、織針的重量等在設備設計時就已經確定、不會隨設備運行而改變的數據。動態屬性集則負責收集隨設備運行而改變的數據,如織針的當前位置、速度和電磁線圈中的電流大小,這些數據也是后續故障診斷的依據。方法集中包含了織針的動作,如成圈、浮線和集圈等操作信息。
2.3 磁懸浮織針故障診斷
磁懸浮織針運行速度快,隨著使用次數和運行時長的增加,故障和性能退化是不可避免發生的。而現有維護策略一般采用定期檢修的方式,這種方式并不一定能及時的發現問題。為了提高系統的穩定性和可靠性,在故障發生時及時發現并停止設備運行,對安全生產有重要意義。
磁懸浮針織設備在完成針織過程中,與傳統機械傳動針織設備一致,依賴于退圈、勾紗、閉口、成圈、牽拉以及再退圈等一系列循環動作。然而,與傳統機械傳動針織設備不同的是,磁懸浮針織設備完成針織過程主要靠對織針高度的控制,而非依靠選針器等機械結構推動織針運動。因此,在理論層面,磁懸浮織針的高度、速度以及電磁線圈的實時電流等數據將共同構成一組相互耦合的數據信號。對于磁懸浮織針設備而言,無論是在故障狀態還是正常運行狀態下,這些數據在特征上都存在明顯的區分。傳統的數據驅動預測方法,主要基于監測數據,通過統計性能指標并結合歷史數據來進行預測分析,這種方法更多的是從統計的角度進行推斷,預測精準度受到個體差異的影響可能較大。隨著人工智能技術的迅猛發展,特別是深度學習技術在故障診斷和壽命預測等領域的廣泛應用,已在多個領域實現了顯著的成效[26]。
卷積神經網絡(Convolutional Neural Net- work, CNN)最初主要應用于機器視覺領域,尤其是在處理圖像分類問題上。由于其出色的特征提取能力使得在圖像分類任務中表現優異,近年來開始有學者將該網絡用于故障診斷領域,也取得一定成效。因此,本研究以CNN模型為基礎,利用磁懸浮織針的歷史運行數據,建立了磁懸浮織針故障診斷模型。
典型的 CNN 模型通常由卷積層、池化層及全連接層組成。卷積層主要負責對輸入數據進行特征提取,池化層負責降維和噪聲過濾,而全連接層則將處理后的特征信息用于分類或回歸任務。本研究設計的CNN結構如圖3所示,由輸入層、特征提取層和分類層組成。輸入層負責對原始數據進行預處理,并在時間尺度上按圖4所示預定的步長采樣數據。特征提取層包括卷積和池化兩部分,卷積從原始數據中提取特征形成特征向量,而池化層采用最大池化運算,采用Re- lu函數作為激活函數。分類層則利用 Softmax激活函數實現區分不同故障狀態的類別。
CNN 模型主要被用于視覺處理領域,對于圖像分類來說,是不需要考慮時間尺度的。而對于故障診斷的數據來講,傳感器取得數據,在時間尺度上是具有關聯性的。如果直接應用圖像分類的模型,將會割裂這種時間尺度上的關聯性。因此,這里需要特別注意的是,輸入層在處理數據時需要按照一定的步長在時間尺度上滑動采樣數據。
3 應用實例
3.1 實例開發
為了檢驗本研究提出的針對磁懸浮針織圓緯機的實時可視化監控架構的可行性,本文針對一種新型管式磁懸浮針織圓緯機[27]的織針設備,開發了一個數字孿生監控系統。該設備的針筒直徑為5英寸,擁有32針的陣列,針距約為9mm 。磁懸浮驅動的“零傳動”特性使得織針的運動頻率更快,這使得對織針運動的實時監控難度大。為了真實、精確地展示磁懸浮織針在編織過程中的工藝情況,并實現32位織針的快速定位、實時信息可視化和智能控制,本系統旨在提高磁懸浮織針系統的運行效率和整體管理水平。
根據前文的虛擬模型構建方法,利用 Solid-Works、3ds Max和Unity 3D完成建模工作,構建了磁懸浮針織設備的輕量化幾何模型,利用 C#腳本,定義了織針的運動方式等。系統的其他部分是利用 C++語言結合 QT 界面框架進行開發的,通過調用 open62541庫,使用 C++搭建 OPC UA客戶端,以實施孿生數據的交換。主界面是基于 QT框架開發的,且在此主界面中嵌入Uni- ty 3D生成的三維模型窗口。由于Unity 3D僅支持使用C#語言開發控制腳本操作虛擬模型,Uni- ty 3D生成的窗口和 QT框架開發的主界面在本質上屬于兩個獨立的進程。OPC UA 客戶端采集的數據屬于主程序,為了傳遞孿生數據至Uni- ty 3D窗口管理的虛擬模型,本研究采取了共享內存的方法,由于這種方法是讀取的同一內存區域,從理論上講是沒有性能損耗。如圖5展示了磁懸浮織針三維可視化監控界面。
除了展示Unity 3D渲染的虛擬實體外,主程序還包括織針管理模塊、故障診斷模塊、凸輪管理模塊等。織針管理模塊中,用戶可以通過選擇不同的編號來監控各個織針的實時運行狀況,并且也可在非連續運行模式中,由虛控實控制織針運動,完成對織針運動的調試。故障診斷模塊允許加載預訓練的模型以分析織針實時運行數據,并在檢測到潛在故障時主動暫停設備運行,以防止進一步損害。通過凸輪管理模塊,用戶可以查看凸輪的旋轉角度、已運行的圈數等。除此之外,程序還建立了基于MySQL數據庫的數據存儲系統,用于將采集的織針運行數據存儲到數據庫中,便于后續訓練新的故障診斷模型,也可為后續設備的改進提供數據支撐。
3.2 應用效果
本研究根據新型管式磁懸浮針織圓緯機的實際運行環境和監控系統功能需求,開發了一個虛實交互監控平臺,并實現了物理實體和虛擬實體之間的成功連接,完成了整個系統的部署工作。如圖6所示,展示了實驗設備運行狀態的截圖。通過對物理實體實時數據的采集,圖6(b)所示的虛擬實體完整的反映了圖6(a)中的物理實體的運行狀態。
為驗證本軟件系統在監控磁懸浮織針運行狀態的效果,拆除了磁懸浮針織圓緯機的其余機構,確保織針的運動狀態可以直觀地被觀測。通過編程讓織針在最低點和最高點之間循環運動。如圖7所示,物理實體織針與虛擬實體織針運動的狀態一致,物理實體的運行狀態能夠被虛擬實體精確的反映出來。
除了在虛擬模型上可視化地監測織針運行狀態之外,還可以在數據層面實時觀測織針的運行數據。圖8展示了織針執行三功位時的實時高度數據。
經測試,該孿生平臺能夠精確地反映新型管式磁懸浮針織圓緯機的運行狀況。孿生界面準確地實現了磁懸浮織針系統的實時映射,完成了對織針定位、織針動作同步、系統模型變化等關鍵功能。三維視角下,畫質清晰流暢,模型動作平滑且無停頓感,數據傳輸間隔為20 ms左右。模型與實際織針系統的協同運作幾乎完美同步,通訊同步性良好。系統顯示出高度的穩定性,且人機交互性強。故障診斷方面,能夠成功檢測到故障的發生并及時暫停設備運行,設備運行的安全性得到提升。
4 總結
針對磁懸浮針織圓緯機缺少實時監控機制的現狀,本研究提出了一種依托數字孿生技術的監控系統架構。該架構基于數字孿生五維模型,并綜合磁懸浮針織圓緯機的特性和監控重點,詳細論述了其在數字孿生五維模型中的構成要素。在此基礎上,本文首先分析了不同三維工具在構建虛擬模型時的優劣,并詳細闡述了采用 Unity 3D引擎構建虛擬模型的流程;繼而構建了基于OPC UA的數據采集模塊,負責采集驅動數字孿生虛擬實體的孿生數據;最后,利用CNN模型搭建了故障診斷模型,以實現對設備運行狀態的實時監控。為了檢驗所提的監控系統架構的可行性和有效性,本研究通過開發管式磁懸浮針織設備的應用案例進行了實證測試,測試結果表明,該監控架構能夠有效監控設備的運行狀態,顯著提升了設備運行狀態的可視化感知程度。
參考文獻:
[1]吳曉光, 張弛, 朱里, 等.磁懸浮式驅動織針的關鍵技術與試驗模型[J].紡織學報, 2014, 35(10):129-135.
WU Xiaoguang, ZHANG Chi, ZHU Li, et al. Key technologies of magnetic suspension driving knit- ting needles and experimental model[J]. Journal of Textile Research, 2014, 35(10):129-135.
[2]吳曉光, 張弛, 朱里, 等.磁懸浮式織針軸向懸浮控制及運動軌跡研究[J].針織工業, 2014, (10):22-25.
WU Xiaoguang, ZHANG Chi, ZHU Li, et al. Axi- al suspended control and motion trajectoru re- search of magnetic suspension driven knitting nee- dle[J]. Knitting Industries, 2014, (10):22-25.
[3]吳曉光, 張弛, 朱里, 等.磁懸浮驅動織針的控制算法與試驗過程研究[J].針織工業, 2013, (11):18-22.
WU Xiaoguang, ZHANG Chi, ZHU Li, et al. Con- trol algorithm of magnetic levitated knitting nee- dle and experimental research[J]. Knitting Indus- tries, 2013, (11):18-22.
[4]吳曉光, 黃振, 朱里, 等.磁懸浮式驅動織針的原理及結構設計[J].針織工業, 2012(6):10-13+72. WU Xiaoguang, HUANG Zhen, ZHU Li, et al. Principle and structural design of magnetic levita- tion driven needle[J]. Knitting Industries, 2012(6):10-13+72.
[5]LIU M, FANG S, DONG H, et al. Review of digi- tal twin about concepts, technologies, and industri- al applications[J]. Journal of Manufacturing Sys- tems, 2021, 58:346-361.
[6]GRIEVES M. Back to the future: Product lifecy- cle management and the virtualization of product information[J]. Product Realization: A Compre- hensive Approach, 2009:1-13.
[7]SHAFTO M, CONROY M, DOYLE R, et al. Draft modeling, simulation, information technolo- gy & processing roadmap[J]. Technology area,2010, 11:1-32.
[8]TUEGEL E J, INGRAFFEAA R, EASON T G, et al. Reengineering aircraft structural life prediction using a digital twin[J]. International Journal of Aerospace Engineering, 2011.
[9]陶飛, 劉蔚然, 張萌, 等.數字孿生五維模型及十大領域應用[J].計算機集成制造系統, 2019, 25(1):1-18.
TAO Fei, LIU Weiran, ZHANG Meng, et al. Five- dimension digital twin model and its ten applica- tions[J]. Computer Integrated Manufacturing Sys- tems, 2019, 25(1):1-18.
[10]張辰源, 陶飛.數字孿生模型評價指標體系[J].計算機集成制造系統, 2021, 27(8):2171-2186. ZHANG Chenyuan, TAO Fei. Evaluation index system for digital twin model[J]. Computer Inte- grated Manufacturing Systems, 2021, 27(8):2171-2186.
[11]袁凡, 陳衛東, 徐銣憶, 等.場景賦能:場景化設計及其教育應用展望——兼論元宇宙時代全場景學習的實現機制[J].遠程教育雜志, 2022, 40(1):15-25.
YUAN Fan, CHEN Weidong, XU Ruyi, et al. Scenario empowerment: scenario design and its educational application prospect: also on the real- ization mechanism of full- scene learning in the era of metaverse[J]. Journal of Distance Educa- tion, 2022, 40(1):15-25.
[12]丁恩杰, 俞嘯, 夏冰, 等.礦山信息化發展及以數字孿生為核心的智慧礦山關鍵技術[J].煤炭學報, 2022, 47(1):564-578.
DING Enjie, YU Xiao, XIA Bing, et al. Develop- ment of mine informatization and key technolo- gies of intelligent mines[J]. Journal of China Coal Society, 2022, 47(1):564-578.
[13]盛戈皞, 錢勇, 羅林根, 等.面向新型電力系統的電力設備運行維護關鍵技術及其應用展望[J].高電壓技術, 2021, 47(9):3072-3084.
SHENG Gehao, QIAN Yong, LUO Lingen, et al. Key technologies and application prospects for operation and maintenance of power equipment in new type power system[J]. High Voltage Engi- neering, 2021, 47(9):3072-3084.
[14]孟松鶴, 葉雨玫, 楊強, 等.數字孿生及其在航空航天中的應用[J].航空學報, 2020, 41(9):6-17.
MENG Songhe, YE Yumei, YANG Qiang, et al. Digital twin and its aerospace applications[J]. Ac- ta Aeronautica et Astronautica Sinica, 2020, 41(9):6-17.
[15]李福興, 李璐爔, 彭友.基于數字孿生的船舶預測性維護[J].船舶工程, 2020, 42(S1):117-120+396.
LI Fuxing, LI Luxi, PENG You. Ship predictive maintenance based on digital twins[J]. Ship Engi- neering, 2020, 42(S1):117-120+396.
[16]賀興, 艾芊, 朱天怡, 等.數字孿生在電力系統應用中的機遇和挑戰[J].電網技術, 2020, 44(6):2009-2019.
HE Xing, AI Qian, ZHU Tianyi, et al. Opportuni- ties and challenges of the digital twin in power system applications[J]. Power System Technolo- gy, 2020, 44(6):2009-2019.
[17]LAAKI H, MICHE Y, TAMMI K. Prototyping a digital twin for realtime remote control over mo- bile networks: application of remote surgery[J]. IEEE Access, 2019, 7:20325-20336.
[18]周瑜, 劉春成.雄安新區建設數字孿生城市的邏輯與創新[J].城市發展研究, 2018, 25(10):60-67.
ZHOU Yu, LIU Chuncheng. The logic and inno- vation of building digital twin city in xiong'an new area[J]. Urban Development Studies, 2018, 25(10):60-67.
[19]戚浩, 李曉月, 陶強, 等.數字孿生驅動的機械工藝系統研究進展[J].航空學報, 2023:1-34.
QI Hao, LI Xiaoyue, TAO Qiang, et al. Research progress in mechanical process system driven by digital twin[J]. Acta Aeronautica et Astronautica Sinica, 2023:1-34.
[20]陳思遠.磁懸浮針織系統的數字孿生監控平臺的研究與構建[D].武漢:武漢紡織大學, 2022.
CHENG Siyuan. Research and construction of digital twin monitoring platform of magnetic lev- itation knitting system[D]. Wuhan: Wuhan Tex- tile University, 2022.
[21]康瑞浩, 胡俊山, 田威, 等.面向工業機器人的數字孿生建模精度補償方法[J].航空制造技術,2023, 66(6):50-59.
KANG Ruihao, HU Junshan, TIAN Wei, et al. A digital twin modelling accuracy compensation method for industrial robots[J]. Aeronautical Manufacturing Technology, 2023, 66(6):50-59.
[22]樊博涵.基于數字孿生的架橋機施工智能監測系統的研究與開發[D].西安:長安大學, 2023.
FAN Bohan. Research and development of digi- tal twin-based intelligent monitoring system for bridge girder erection machine[D]. Xi an: Chang an University, 2023.
[23]李梅, 姜展, 滿旺, 等.基于虛幻引擎的智能礦山數字孿生系統云渲染技術[J].測繪通報, 2023(1):26-30.
LI Mei, JIANG Zhan, MAN Wang, et al. Study on could rendering technology of intelligent mine digital twin system using unreal engine[J]. Bulletin of Surveying and Mapping, 2023(1):26-30.
[24]楊愉, 張弛, 左小燕, 等.基于數字孿生的基礎模搬運監控研究[J].武漢紡織大學學報, 2023, 36(1):9-13.
YANG Yu, ZHANG Chi, ZUO Xiaoyan, et al. Research on monitoring of basic mold handling based on digital twin[J]. Journal of Wuhan Tex- tile University, 2023, 36(1):9-13.
[25]楊帆, 吳濤, 廖瑞金, 等.數字孿生在電力裝備領域中的應用與實現方法[J].高電壓技術, 2021, 47(5):1505-1521.
YANG Fan, WU Tao, LIAO Ruijin, et al. Appli- cation and implementation method of digital twin in electric equipment[J]. High Voltage Engi- neering, 2021, 47(5):1505-1521.
[26]ZHAO R, YAN R, CHEN Z, et al. Deep learning and its applications to machine health monitoring [J], 2019, 115:213-237.
[27]宛張靈.管式直驅電織針關鍵機理研究及實驗[D].武漢:武漢紡織大學, 2022.
WANG Zhangling. Research and experiment on the key mechanism of tubular direct drive elec- tric knitting needle[D]. Wuhan: Wuhan Textile University, 2022.
(責任編輯:周莉)
猜你喜歡
江蘇安全生產(2022年7期)2022-08-24 02:11:52
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
北京測繪(2022年6期)2022-08-01 09:19:06
選煤技術(2022年2期)2022-06-06 09:13:12
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測繪(2021年7期)2021-07-28 07:01:18
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
山東農業工程學院學報(2019年11期)2020-01-19 02:49:22
傳媒評論(2019年4期)2019-07-13 05:49:14
