基于結(jié)構(gòu)優(yōu)化的聚風(fēng)裝置流場(chǎng)特性數(shù)值研究
2024-03-28 12:09:04徐愷黃成黃家庚
可再生能源 2024年3期
徐愷,黃成,黃家庚
(河南科技大學(xué)機(jī)電工程學(xué)院,河南 洛陽(yáng) 471003)
0 引言
我國(guó)風(fēng)能資源豐富,但目前采用的葉片式風(fēng)電機(jī)對(duì)低風(fēng)速不敏感,有效工作風(fēng)速在5.2 m/s以上[1]。文獻(xiàn)[2]提出了一種管道式風(fēng)力發(fā)電系統(tǒng),命名為INVELOX,該類(lèi)管道式風(fēng)能采集裝置不需要安裝渦輪機(jī)塔。
為了提高INVELOX系統(tǒng)工作效能,減小損失,研究人員嘗試了多種減小溢出的方法。為了提高INVELOX的氣動(dòng)性能,文獻(xiàn)[3]設(shè)計(jì)了新型窗簾式結(jié)構(gòu),并對(duì)兩種簾式結(jié)構(gòu)和它們的組合結(jié)構(gòu)進(jìn)行了數(shù)值模擬,結(jié)果表明,采用延長(zhǎng)導(dǎo)流板的簾式結(jié)構(gòu)對(duì)INVELOX系統(tǒng)中流速比(SR)有明顯提高。文獻(xiàn)[4]研究了結(jié)構(gòu)幾何參數(shù)對(duì)INVELOX氣動(dòng)性能的影響,結(jié)果表明,當(dāng)進(jìn)氣口投影面積和文丘里管橫截面積之比為33.6時(shí)達(dá)到最佳比,此時(shí)采用6.7 m/s作為流場(chǎng)風(fēng)速時(shí),SR值最大,約為1.7。文獻(xiàn)[5,6]通過(guò)安裝單臺(tái)、雙臺(tái)和三臺(tái)風(fēng)電機(jī)組對(duì)電學(xué)輸出進(jìn)行性能測(cè)試,得出相同條件下每個(gè)風(fēng)力渦輪機(jī)的輸出電壓和功率,證明了渦輪機(jī)數(shù)量對(duì)總功率的非線性影響;與傳統(tǒng)風(fēng)力機(jī)相比,由于無(wú)需額外基礎(chǔ)設(shè)施,安裝多臺(tái)機(jī)組對(duì)使用成本沒(méi)有顯著提高。為解決INVELOX出口氣流受自然風(fēng)的阻礙,文獻(xiàn)[7]采用CFD方法對(duì)INVELOX風(fēng)力發(fā)電系統(tǒng)進(jìn)、出口結(jié)構(gòu)進(jìn)行優(yōu)化分析,通過(guò)改變出口氣流方向減小出口氣流受自然風(fēng)的阻礙。上述研究對(duì)INVELOX系統(tǒng)有很大改進(jìn),增強(qiáng)了對(duì)風(fēng)的俘獲效率,但要實(shí)現(xiàn)真正意義的全方向風(fēng)能俘獲,不僅要對(duì)不同夾角的水平來(lái)流風(fēng)向進(jìn)行流場(chǎng)分析,還需要對(duì)系統(tǒng)的工作風(fēng)速進(jìn)行測(cè)定,以及對(duì)來(lái)流風(fēng)向與水平面成一定傾斜角時(shí)流場(chǎng)、不同工況下流場(chǎng)特性及SR值進(jìn)行分析。
本文設(shè)計(jì)了一種小型風(fēng)能采集裝置,采集裝置結(jié)構(gòu)上采用了文獻(xiàn)[3]的簾式結(jié)構(gòu),采用計(jì)算流體軟件XFlow對(duì)采集裝置進(jìn)行氣動(dòng)性仿真模擬。由于無(wú)網(wǎng)格的格子玻爾茲曼方法可以在很大程度上節(jié)約前處理時(shí)間,并避免因網(wǎng)格質(zhì)量問(wèn)題帶來(lái)的計(jì)算誤差,因此,本文采用無(wú)網(wǎng)格的格子玻爾茲曼方法對(duì)不同水平風(fēng)向和傾斜風(fēng)向下的文丘里管中的平均風(fēng)速進(jìn)行計(jì)算,分析不同夾角下的SR值,確定其滿足工作要求的風(fēng)向角度。最低工作風(fēng)速是此類(lèi)裝置在現(xiàn)實(shí)環(huán)境中得到應(yīng)用的關(guān)鍵因素,風(fēng)速為2~5 m/s的地區(qū)約占我國(guó)風(fēng)能資源的85%,INVELOX系統(tǒng)對(duì)風(fēng)速要求較低,可廣泛應(yīng)用于低風(fēng)速區(qū)域的風(fēng)能采集。
1 風(fēng)采集裝置模型
1.1 結(jié)構(gòu)模型
本文設(shè)計(jì)的采集裝置模型在三維制圖軟件UG12.0中以彎管上端圓中心點(diǎn)為坐標(biāo)原點(diǎn)進(jìn)行建模,為方便在XFlow中對(duì)模型進(jìn)行幾何變換,將該采集裝置(圖1)分為上、下兩個(gè)部分,上部分由聚風(fēng)錐管、凸臺(tái)和導(dǎo)流板組成,下部分由文丘里管和一段90°彎管組成,將模型保存為.STP格式的三維實(shí)體導(dǎo)入XFlow中進(jìn)行流場(chǎng)分析。
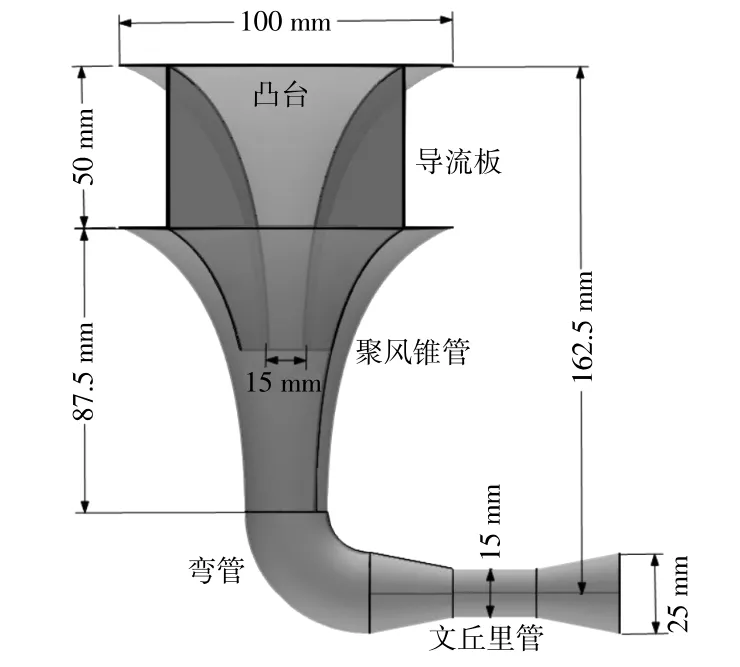
圖1 模型示意圖Fig.1 The sckematic drawing of samples
圖1中,進(jìn)氣口高度為50 mm,上端長(zhǎng)為100 mm,文丘里管工作段外徑為15 mm、內(nèi)徑為14 mm,整個(gè)裝置所有薄壁厚度均為0.5 mm。該采集裝置進(jìn)風(fēng)口面積與文丘里管工作段截面積之比為32.48,與文獻(xiàn)[3]中的最佳比值33.6十分接近,有利于對(duì)環(huán)境中風(fēng)的采集。
1.2 數(shù)值模型
傳統(tǒng)CFD通過(guò)有限元和有限體積法求解納維-斯托克斯方程得到流場(chǎng)信息。本文采用的XFlow軟件是基于格子玻爾茲曼方程模型,描述的流體粒子具有一定的離散速度,其分布函數(shù)為在固定的方格上的運(yùn)動(dòng)過(guò)程。該方程通常由流體粒子基于分布函數(shù)的演化方程、格子結(jié)構(gòu)及離散速度集合3部分構(gòu)成。在具有離散速度的連續(xù)空間介質(zhì)中,格子玻爾茲曼方程[8]為
式中:fi為粒子密度分布函數(shù);ei為沿格子方向的速度;Ωi為碰撞作用算子;n為該LBM模型的不同格子速度總數(shù)。
Xflow軟件采用D3Q27模型進(jìn)行計(jì)算,其中3表示維度,27表示該模型有27個(gè)速度向量。
2 仿真驗(yàn)證
2.1 網(wǎng)格無(wú)關(guān)性驗(yàn)證
為避免分辨率設(shè)置使網(wǎng)格數(shù)量不同帶來(lái)的計(jì)算誤差,本文采用0.04,0.05 m和0.06 m 3種不同的遠(yuǎn)場(chǎng)分辨率,加密方法采用近壁面自適應(yīng)格子加密及尾流加密,近壁面分辨率為遠(yuǎn)場(chǎng)分辨率的1/16倍。在來(lái)流風(fēng)速為6 m/s的風(fēng)場(chǎng),3組不同分辨率的文丘里管中的平均速度如表1所示。

表1 3組分辨率參數(shù)Table 1 Three sets of resolution parameters
由表1可知,3組網(wǎng)格下文丘里管內(nèi)速度變化差別不大,特別是中等和精細(xì)分辨率等級(jí)下的平均速度基本相同。在保證精度條件下,為節(jié)約計(jì)算成本,采用中等分辨率等級(jí)作為后續(xù)計(jì)算依據(jù)。其中遠(yuǎn)場(chǎng)分辨率為0.05 m的文丘里管內(nèi)的速度隨時(shí)間變化曲線如圖2所示。
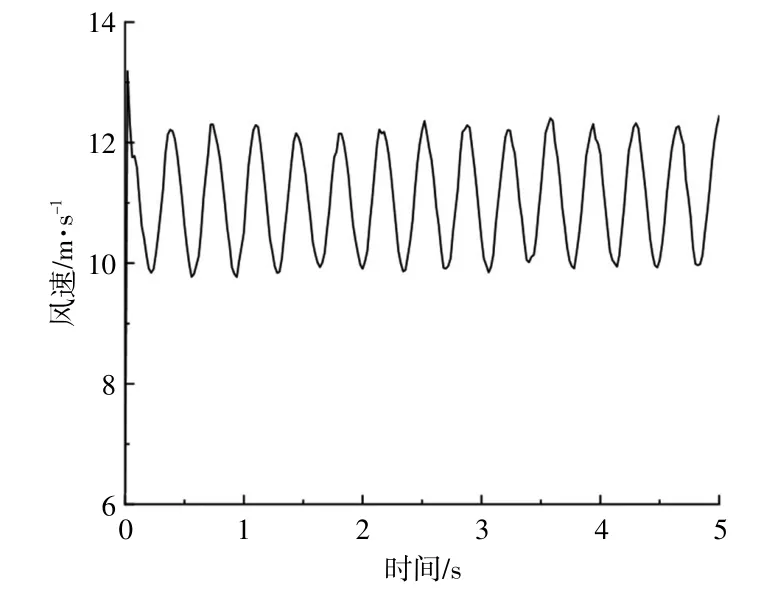
圖2 分辨率為0.05 m時(shí)速度隨時(shí)間變化曲線Fig.2 Speed vs.time when the resolution is 0.05 m
2.2 對(duì)比驗(yàn)證
為進(jìn)一步證實(shí)仿真可靠性,本文采用的物理模型和入口流速與文獻(xiàn)[3]基本保持一致,并進(jìn)行對(duì)比仿真驗(yàn)證。設(shè)置入口流速為6.7 m/s,創(chuàng)建Custom field自定義函數(shù),并設(shè)置Custom field函數(shù)為流速比,即:
本文采用優(yōu)化結(jié)構(gòu),由式(2)得到的SR約為1.78,計(jì)算結(jié)果相較于文獻(xiàn)[3]有小幅提高。通過(guò)對(duì)比發(fā)現(xiàn),在凸臺(tái)最下方進(jìn)風(fēng)口處以及下方聚風(fēng)錐管周?chē)娘L(fēng)速分布略有差異,上方凸臺(tái)母線曲率的不同可能是造成文丘里管內(nèi)SR值較大的原因之一。文獻(xiàn)[9,10]對(duì)造成的原因做了分析和說(shuō)明,比如擴(kuò)散器截面幾何變化、聚風(fēng)錐管線型函數(shù)不確定性等。采集器工作段部分的速度云圖和文丘里管擴(kuò)散器周?chē)鲌?chǎng)特性與文獻(xiàn)[3]基本一致。圖3為本文計(jì)算結(jié)果和文獻(xiàn)[3]對(duì)稱(chēng)面內(nèi)SR云圖。

圖3 對(duì)稱(chēng)面內(nèi)SR云圖Fig.3 Contrast cloud map for plane of symmetry
2.3 仿真條件設(shè)置
基于格子玻爾茲曼方法的XFlow軟件為用戶提供的虛擬風(fēng)洞可直接將.STP型導(dǎo)入,不需要?jiǎng)澐志W(wǎng)格,預(yù)處理器可以根據(jù)輸入幾何和每個(gè)幾何的分辨率生成原始的八叉樹(shù)晶格結(jié)構(gòu),當(dāng)渦度達(dá)到閾值時(shí),網(wǎng)格會(huì)自動(dòng)細(xì)化。因此,需要定義3種分辨率:遠(yuǎn)場(chǎng)分辨率、尾跡分辨率和近壁分辨率[11]。本文選用3d流場(chǎng),在文丘里管中心軸線位置建立插值點(diǎn)監(jiān)控速度,仿真時(shí)間為5 s,設(shè)置湍流強(qiáng)度為5%,計(jì)算域邊界條件如表2所示。

表2 計(jì)算域邊界條件設(shè)置Table 2 Boundary setting of the computational domain
針對(duì)XFlow軟件提供的Automatic模型、Smagorinsky模型、Dynamic Smagorinsky(DSM)模型、壁面自適應(yīng)局部渦粘性模型(WALE)等不同湍流模型,以6 m/s作為流場(chǎng)風(fēng)速,計(jì)算不同模型下文丘里管內(nèi)平均速度以及SR比值(表3)。
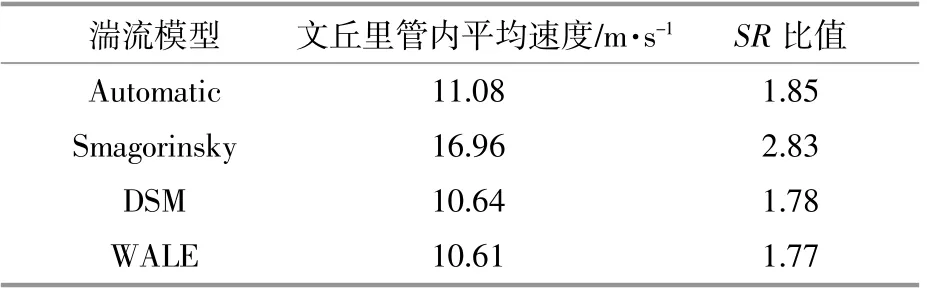
表3 不同湍流模型下文丘里管內(nèi)平均速度以及SR比值Table 3 The average velocity and SR ratio in the lower turbulence model of different turbulence models
由表3可知,采用Automatic模型作為基準(zhǔn)時(shí),除Smagorinsky模型外,其它湍流模型的誤差均不超過(guò)5%。依據(jù)軟件用戶手冊(cè)及文獻(xiàn)[12]中類(lèi)似工程模擬,造成Smagorinsky模型誤差較大的原因是,該模型與DSM模型具有較高的渦粘性和各向同性假設(shè),不能準(zhǔn)確預(yù)測(cè)壁面附近流體流動(dòng)。WALE模型在靠近和遠(yuǎn)離壁面以及層流和湍流的情況下均具有良好的特性,因此,在之后的計(jì)算中均采用WALE模型進(jìn)行流場(chǎng)分析。
3 計(jì)算結(jié)果及分析
3.1 不同風(fēng)速下SR值及工作風(fēng)速
為測(cè)定該風(fēng)能采集裝置的工作效率,選取流場(chǎng)風(fēng)速為1.8~6.6 m/s,將此范圍分為16個(gè)流場(chǎng)風(fēng)速,每個(gè)流場(chǎng)風(fēng)速間隔為0.3 m/s。在不同來(lái)流風(fēng)速下對(duì)其進(jìn)行流場(chǎng)特性仿真分析,通過(guò)監(jiān)測(cè)文丘里管內(nèi)平均風(fēng)速變化,得到不同風(fēng)速場(chǎng)下SR值。對(duì)不同流場(chǎng)風(fēng)速下的SR值進(jìn)行曲線擬合,并求出擬合曲線的斜率曲線,該斜率可以表征采集裝置對(duì)流場(chǎng)風(fēng)速增強(qiáng)速率的快慢。不同流場(chǎng)風(fēng)速下的SR值、SR值擬合曲線以及擬合曲線的斜率曲線如圖4所示。

圖4 不同流場(chǎng)風(fēng)速下V-SR及SR斜率曲線Fig.4 V-SR value and slope curve under different flow field and wind speed
由圖4可知:當(dāng)流場(chǎng)風(fēng)速為3 m/s時(shí),SR值在1.03左右,證明此風(fēng)速下該風(fēng)能采集裝置對(duì)流場(chǎng)風(fēng)速開(kāi)始有增強(qiáng)作用;隨著流場(chǎng)風(fēng)速的增加,文丘里管內(nèi)SR值隨流場(chǎng)風(fēng)速的提高而隨之增大,證明系統(tǒng)對(duì)流場(chǎng)風(fēng)速的增強(qiáng)效果愈加明顯;由斜率曲線可知,當(dāng)流場(chǎng)風(fēng)速為2.1~4.2 m/s時(shí),SR增速較大,表明在低風(fēng)速下該裝置增強(qiáng)風(fēng)速的效果更好,當(dāng)流場(chǎng)風(fēng)速達(dá)到5.1 m/s后,SR的增長(zhǎng)速率逐漸放緩,保持在0.2以內(nèi)。
3.2 不同水平風(fēng)向角
為探究風(fēng)向的影響,首先考慮水平方向的來(lái)流風(fēng)。由于在水平方向上,該裝置為左右對(duì)稱(chēng)結(jié)構(gòu),因此計(jì)算了水平面內(nèi)流場(chǎng)方向與文丘里管中心軸線夾角α為0~180°時(shí)SR值的變化情況。將該平面內(nèi)流場(chǎng)分為13個(gè)方向,水平夾角風(fēng)向示意圖如圖5所示。

圖5 水平夾角示意圖Fig.5 Schematic diagram of horizontal angle
將0~180°風(fēng)向下的SR值做一個(gè)對(duì)稱(chēng),即可得到-180~180°(順時(shí)針取正)方向上不同水平風(fēng)向角下的SR值(圖6)。
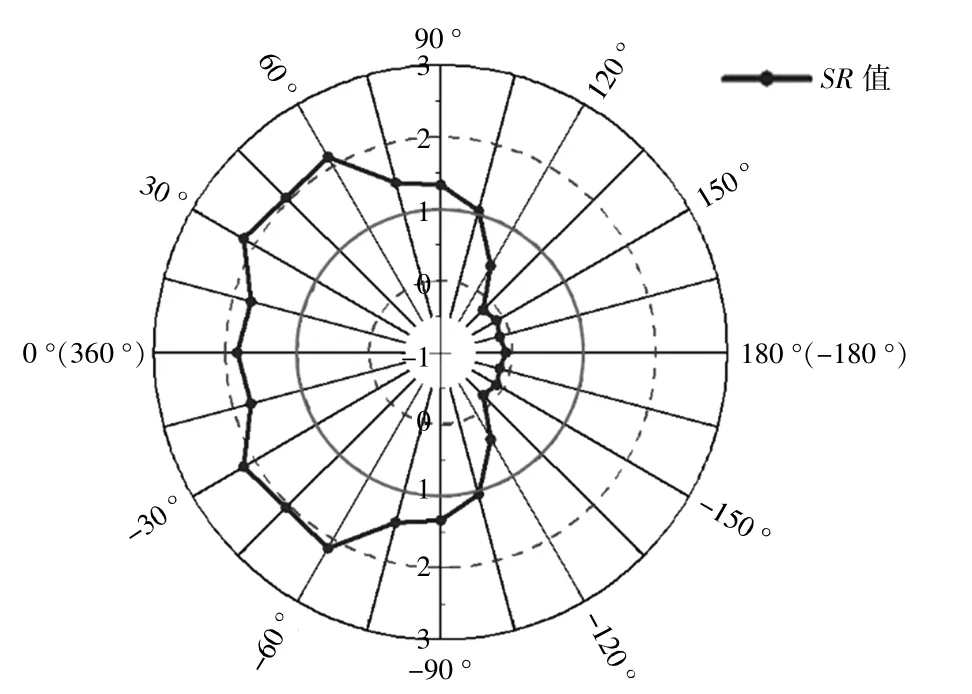
圖6 不同水平風(fēng)向角下SR值Fig.6 SR values at different horizontal wind direction angles
由圖6可知:當(dāng)水平風(fēng)向夾角為-60~60°時(shí),SR值均在1.5以上,證明該裝置對(duì)流場(chǎng)中風(fēng)速增強(qiáng)作用較強(qiáng);當(dāng)夾角繼續(xù)變大,這種增強(qiáng)作用開(kāi)始降低,特別是當(dāng)夾角達(dá)到105°以后,SR值小于1,無(wú)法實(shí)現(xiàn)對(duì)環(huán)境中來(lái)流風(fēng)加速的效果,造成該情況的主要原因是文丘里管擴(kuò)散段內(nèi)產(chǎn)生了風(fēng)倒灌,這是此類(lèi)風(fēng)電系統(tǒng)在廣泛應(yīng)用中亟需解決的主要問(wèn)題之一。
3.3 不同傾斜風(fēng)向角
結(jié)合現(xiàn)實(shí)環(huán)境中風(fēng)可能存在的來(lái)流方向,計(jì)算了來(lái)流風(fēng)向與風(fēng)能采集裝置的水平面傾斜角β取值為0~360°時(shí)不同風(fēng)向的SR值(圖7)。將360 °均勻分為24個(gè)方向,即每個(gè)方向夾角為15°,流場(chǎng)風(fēng)速設(shè)置為6 m/s,不同傾斜角下的SR值如圖8所示。

圖7 傾斜角示意圖Fig.7 Schematic diagram of tilt angle

圖8 不同傾斜角下SR值Fig.8 SR value under different tilt angles
由圖8可知:當(dāng)傾斜角為0 °時(shí),該采集裝置增速效果最好;當(dāng)傾斜角為0~45 °和315~360 °時(shí),該裝置對(duì)風(fēng)速有增強(qiáng)作用;當(dāng)來(lái)流風(fēng)向在其它傾斜角度下,SR值小于1,在第三象限內(nèi)的角度下,SR值為負(fù)值。傾斜風(fēng)向下,文丘里管內(nèi)速度有一定幅度的波動(dòng),特別是在第三象限角度下,其原因是復(fù)雜的,主要是受流場(chǎng)風(fēng)向及流場(chǎng)壓強(qiáng)影響。
針對(duì)影響風(fēng)速變化的主要因素,圖9,10分別給出了傾斜風(fēng)向角為30°和225°時(shí)瞬時(shí)速度矢量圖及瞬時(shí)壓力場(chǎng)云圖。
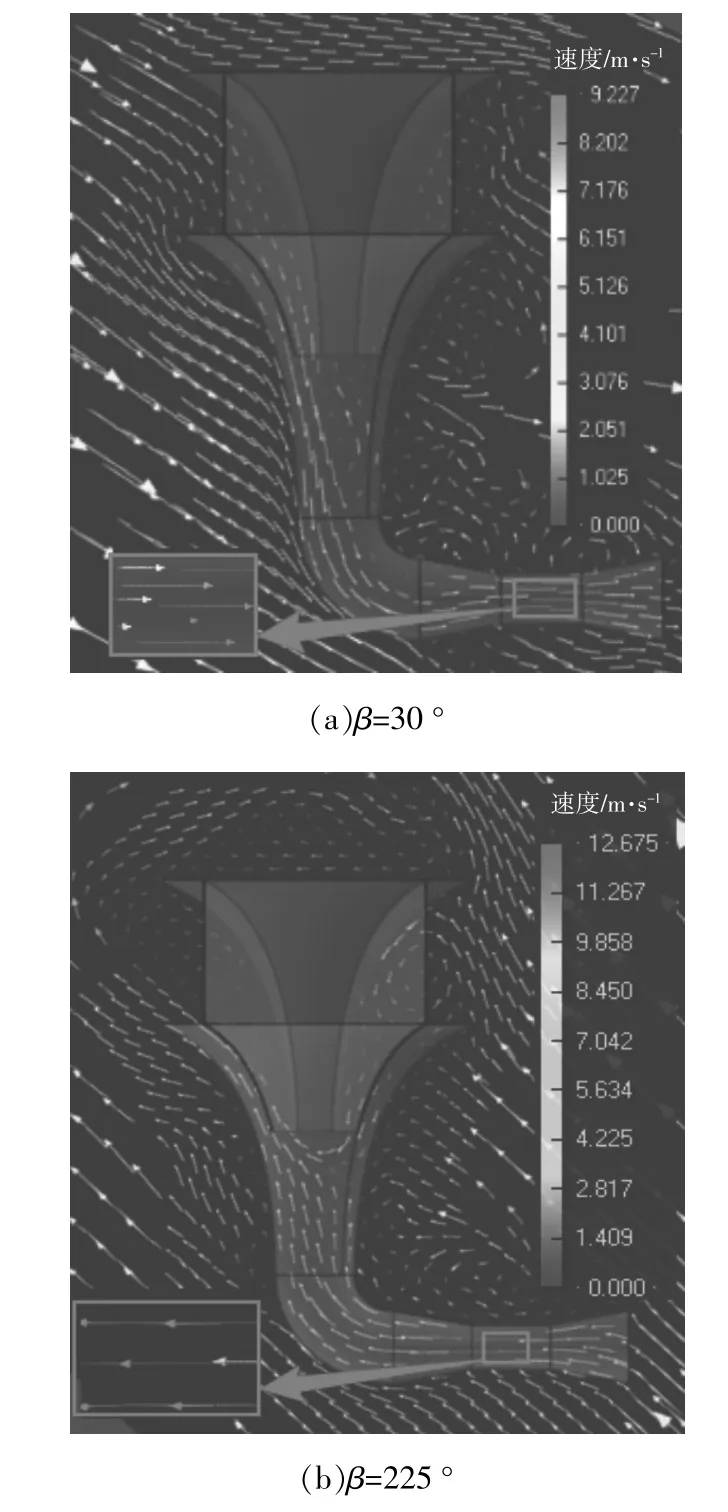
圖9 瞬時(shí)速度對(duì)比矢量圖Fig.9 Instantaneous speed comparison vector diagram
通過(guò)對(duì)流場(chǎng)特性的對(duì)比分析可知,影響文丘里管內(nèi)SR值變化的原因主要有以下幾點(diǎn)。
①入口風(fēng)向投影面積的影響。當(dāng)傾斜角為0~45°時(shí),文丘里管內(nèi)風(fēng)速會(huì)隨著入口風(fēng)向投影面積的減小而減小[圖9(a)],此時(shí)風(fēng)的流向有利于將風(fēng)送入文丘里管內(nèi),因此在該角度區(qū)間內(nèi)風(fēng)能采集裝置對(duì)流場(chǎng)風(fēng)速有較高的提升。
②流場(chǎng)風(fēng)向的影響。當(dāng)傾斜角為90~270°時(shí),隨著傾斜角不斷變大[圖9(b)],流場(chǎng)內(nèi)風(fēng)的流向與該裝置原理上出口風(fēng)向相反,流場(chǎng)內(nèi)風(fēng)的流向不利于風(fēng)從入口處流進(jìn)文丘里管內(nèi),文丘里管內(nèi)速度小于流場(chǎng)風(fēng)速,當(dāng)傾斜角超過(guò)105°后風(fēng)倒灌,文丘里管內(nèi)SR值為負(fù)值。
③進(jìn)、出口附近壓強(qiáng)的影響。通過(guò)對(duì)圖10瞬時(shí)壓力場(chǎng)分析可知,不同角度下來(lái)流風(fēng)使裝置進(jìn)、出口附近產(chǎn)生不同的壓強(qiáng),當(dāng)傾斜角為180~270°時(shí),由于背風(fēng)面附近風(fēng)的流速快,導(dǎo)致入口處壓強(qiáng)小,迎風(fēng)面出口側(cè)形成高壓區(qū),在壓力差作用下,風(fēng)從出口處流入,此時(shí)文丘里管內(nèi)風(fēng)向?yàn)榉捶较颍绎L(fēng)速較高。

圖10 瞬時(shí)壓力對(duì)比云圖Fig.10 Contrast cloud map of instantaneous pressure
風(fēng)向的改變對(duì)文丘里管工作段風(fēng)速影響較大,實(shí)際使用過(guò)程中應(yīng)結(jié)合環(huán)境中的風(fēng)向,在達(dá)到工作風(fēng)速條件下,對(duì)該裝置進(jìn)行合理的安裝,以達(dá)到裝置最大工作效率。
4 結(jié)論
本文采用基于格子玻爾茲曼方法的流體力學(xué)軟件XFlow對(duì)優(yōu)化設(shè)計(jì)的風(fēng)能采集裝置進(jìn)行流場(chǎng)特性研究,計(jì)算不同風(fēng)速下文丘里管內(nèi)風(fēng)速的變化,并對(duì)該裝置在不同水平風(fēng)向夾角和傾斜風(fēng)向夾角下文丘里管內(nèi)平均速度變化進(jìn)行計(jì)算,得到以下結(jié)論。
①通過(guò)案例對(duì)比,證實(shí)了采用基于格子玻爾茲曼方法的流體力學(xué)軟件XFlow對(duì)所設(shè)計(jì)的風(fēng)能采集裝置進(jìn)行流場(chǎng)分析的可行性。
②計(jì)算了風(fēng)能采集裝置在不同流場(chǎng)風(fēng)速下對(duì)應(yīng)的SR值,反映出不同風(fēng)速下其對(duì)風(fēng)速的增強(qiáng)能力的變化,0°水平風(fēng)向下最低工作風(fēng)速為3 m/s,且增強(qiáng)能力隨著流場(chǎng)風(fēng)速的增加而增加。
③在風(fēng)速為6 m/s環(huán)境中,計(jì)算了風(fēng)能采集裝置在不同水平和傾斜風(fēng)向夾角下的SR值。分析了不同夾角對(duì)文丘里管內(nèi)風(fēng)速增強(qiáng)效果的影響,給出了增強(qiáng)作用時(shí)(SR>1)水平風(fēng)向夾角α以及傾斜風(fēng)向夾角β的取值范圍。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電測(cè)與儀表(2015年8期)2015-04-09 11:50:06
電機(jī)與控制應(yīng)用(2015年7期)2015-03-01 03:50:15