基于智能卸荷電路的雙饋風電機組故障穿越控制
2024-03-28 12:09:12魯華永袁越
可再生能源 2024年3期
關鍵詞:故障
魯華永,袁越
(1.河海大學能源與電氣學院,江蘇 南京 210098;2.國網河南省電力公司電力調度控制中心,河南 鄭州450052)
0 引言
為實現“雙碳”目標[1],可再生能源發電在電網系統中得到了大力發展,風電因其資源豐富、發電成本低、建設周期短的優勢得到了廣泛應用。然而,隨著電力系統中風電滲透率的不斷提高,其對電網整體穩定運行帶來了挑戰。當電網發生電壓下跌或驟升故障時,一方面電網因風機并網導致電壓支撐能力減弱,另一方面風機為了自我保護會主動與電網解列,在兩要素的作用下,進一步加劇了故障程度,甚至會導致系統崩潰。因此在電網出現故障時,風電機組的故障穿越能力愈發重要[2,3]。
在風電機組低電壓穿越(Low-Voltage Ride Through,LVRT)控制上,國內外學者進行了大量研究,提出了撬棒(Crowbar)電路[4,5]。傳統Crowbar保護雖有效避免了故障期間風電脫機問題,但由于其電阻值固定,電路調節能力有限,只能適用于特定故障類型,面對不同電壓跌落深度時,難以保證調節效果。文獻[6]提出了一種動態調節轉子Crowbar阻值的LVRT方案,通過自適應控制策略對電阻值進行整定,實現不同故障下的不同電阻值投入。與固定阻值的傳統Crowbar方法相比,其在抑制轉子電流和直流母線電壓效果上更加明顯,且Crowbar投入次數也大大減少。然而Crowbar投入期間轉子側變流器閉鎖,風電機組需從電網吸收大量無功功率進行勵磁,造成系統無功缺額增加、直流電壓升高,不利于電壓恢復。文獻[7]提出了一種直流卸荷(Chopper)電路和變槳距角的協調控制方案,在故障初期通過投入Chopper電路快速吸收盈余功率,同時調整槳距角徹底消除盈余功率,切除卸荷回路,有效實現故障期間的LVRT。文獻[8]采用定子與電網間串聯電阻、轉子變流器輸出無功電流方式支撐電網電壓。文獻[9]則在定子上串聯電抗來抑制故障時電流升高,同時在轉子變流器控制中附加無功控制,保證故障期間風機的無功功率支撐和電網電壓的恢復。
風電機組LVRT恢復過程中,由于故障清除或負荷退出容易引發電壓驟升現象,并且當單相重合閘工況出現和無功補償設備未及時撤出造成無功功率過剩時,也會造成電網電壓驟升,也就是在風電機組LVRT成功后,仍然面臨著高電壓穿越(High-Voltage Ride Through,HVRT)的風險。目前關于風電機組HVRT的研究成果較少,解決方案仍集中在改進風電機組變流器控制策略[10-12]和附加硬件設備[13,14]兩方面。在軟件改進上,文獻[10]利用虛擬阻抗控制提高雙饋風機的HVRT能力,然而,當轉子電流超過轉子側變換器的安全裕度時,硬件部分Crowbar電路仍會被激活[11]。為避免Crowbar電路的頻繁投切,文獻[12]在轉子側附加轉子電流抑制,同時在網側附加外環電壓控制,極大地改善了風電機組的HVRT能力。在附加硬件設備改進方法上,文獻[13]在電壓驟升期間通過啟動Chopper電路吸收盈余能量、抑制直流側過電壓、保護直流母線電容,不足之處在于卸荷電路的頻繁投切會使電流波形產生畸變,不利于電網穩定。文獻[14]采用直流電壓協調控制方案,通過無功電流控制和超級電容儲能系統對直流過電壓進行了限制,然而儲能的配置使得風機的投資和運行成本大大增加。
為了實現并網風電機組高低壓穿越功能需求,同時解決直流卸荷電路頻繁投切和超級電容器經濟成本過高的問題,本文提出了基于智能卸荷電路的風電機組故障穿越控制方案。該方法在直流卸荷電路基礎上進行改進,將DC/DC控制電路與卸荷電阻相連接,通過在控制電路內引入有功功率-直流電壓下垂環節,實現電路電阻吸收功率隨電壓波動的平滑調節。該策略同時設有LVRT和HVRT兩種模式,根據并網點電壓突變情況自動識別,保證風電機組在電壓突增或驟降故障下均能成功穿越。所提控制方案不僅有效避免卸荷電路頻繁投切引起的電壓、電流波形畸變,還能在保持與超級電容儲能控制同樣故障穿越性能的前提下大幅度減少經濟投入。
1 國內外故障穿越技術要求
為避免故障造成風電機組解列、電網崩潰,提高電網運行的安全可靠性,世界各國針對電網運行特點、風電機組容量和線路耐壓能力提出了相應的風機故障穿越能力要求。表1,2分別列出了世界主要國家風機LVRT和HVRT的并網規范。風機故障穿越并網規范主要對電網發生故障導致電壓或頻率波動時,風機維持并網運行的最低/高電壓提出了要求,同時規定了該工況下風機保持運行的時長以及恢復至穩定電壓所需的時間。
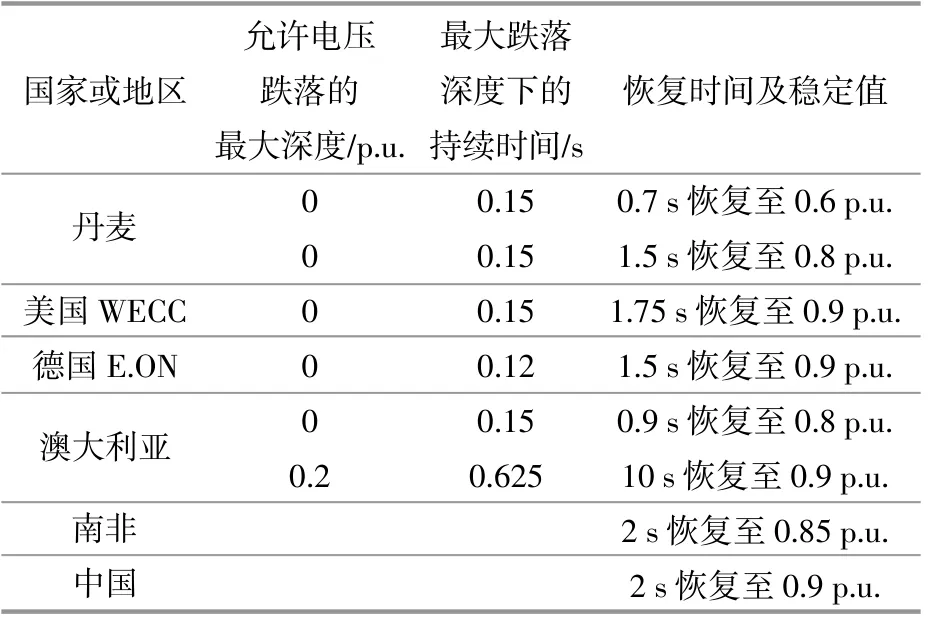
表1 部分國家或地區的LVRT技術要求Table 1 Technical requirements for low voltage ride through in some countries or regions
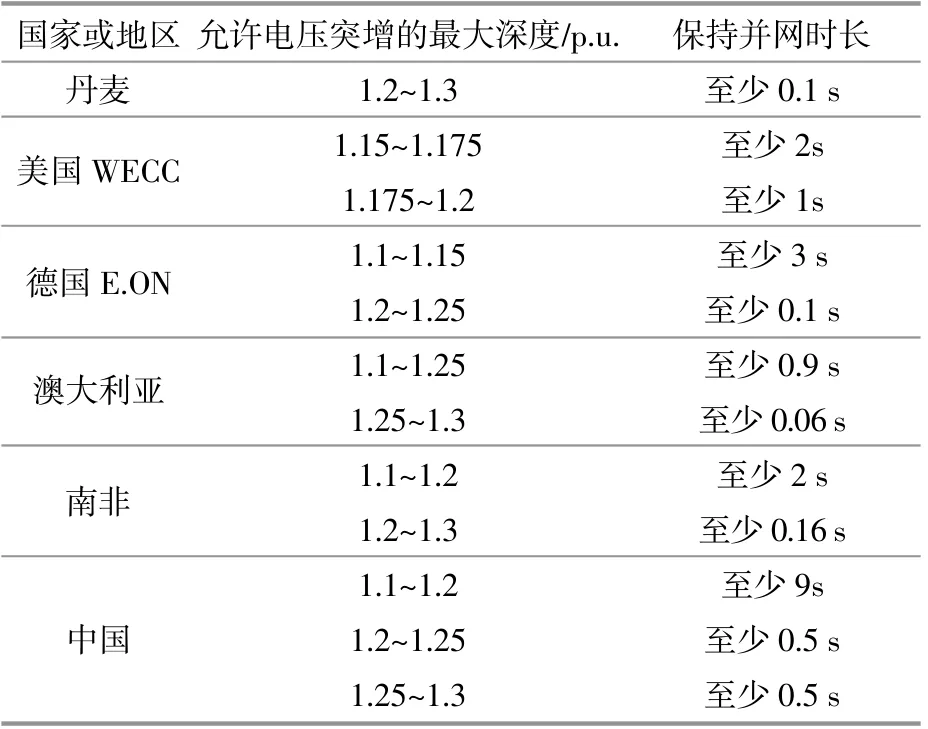
表2 部分國家或地區的HVRT技術要求Table 2 Technical requirements for high voltage ride through in some countries or regions
由表1,2可以看出,針對LVRT問題,國外大多數國家和地區均要求機組具備零電壓穿越(Zero-Voltage Ride Through,ZVRT)能力,即因故障導致系統電壓突然下降為0時,風電機組也能在0.12~0.15 s內維持并網運行,并可以在規定時間段內恢復到穩定值。而在HVRT問題上,則要求風電機組在系統電壓升高到1.10~1.30 p.u.時保持一定時間的并網運行[15-17],平穩“穿越”高電壓。不同國家在電壓升高幅值和保持并網時間上雖有所差異,但均規定當系統電壓上升到1.1 p.u.及其以下值時風機能實現不間斷并網運行。
對于我國風電機組LVRT/HVRT技術要求如圖1所示。曲線1為LVRT要求,曲線2為HVRT要求。
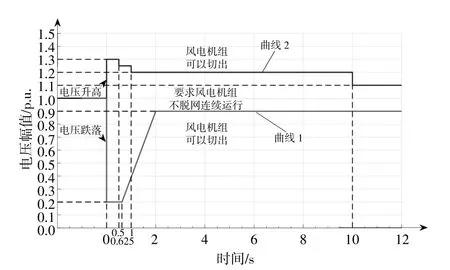
圖1 我國風電機組高LVRT要求Fig.1 Requirements for high and low voltage ride through of wind turbines in China
由圖1可知,當并網電壓下跌至0.2 p.u.時,風機在625 ms內能維持安全可靠不脫網運行,并且能夠向電網提供無功支撐,且無功電流需在75 ms內響應、持續時間不少于550 ms,進而保證并網電壓能夠在2 s內恢復至0.9 p.u.。當并網電壓突升至1.3 p.u.時,風電機組能在500 ms內不脫機運行,并能助力并網電壓升高后10 s內恢復至1.1 p.u.以下。構成了故障期間風機不脫網連續運行區域,而在曲線1以上和曲線2以下的區域內,運行風機則允許從電網切出[18]。
2 雙饋風電機組故障穿越控制策略研究
雙饋風電機組作為風力發電機的主流機型之一。雙饋風機的定子側與電網直接連接,轉子側通過PWM變流器與電網相連,該結構雖有效降低變流器容量成本,但相較于采用背靠背變流器與電網相連的直驅風機,不能獨立于電網運行,受電網狀態影響大,面對電網故障時,LVRT難度更高,控制手段更為復雜。因此,本文在研究風電機組故障穿越控制策略時,以雙饋風電機組為研究對象。當電網電壓發生驟升/驟降故障時,由于雙饋風電機組定子端與電網直連,風機定子電壓受并網點電壓影響突增,依據磁鏈守恒定律,定子繞組上將感生出非周期、直流磁鏈,進而在轉子側感應出電動勢。然而受到雙饋風電機組變流器容量限制,轉子電壓不足以抵消該電動勢,導致轉子阻抗上產生較大的壓降,引發轉子電流的驟升和直流母線電壓的抬高。并且在故障時為防止脫機事件發生,風電機組會通過網側變流器向電網輸送無功功率,但網側變流器的容量有限,無功功率輸出量的增加必定會導致有功功率輸出量的減少,多余能量無法流出致直流母線電壓升高,轉子轉速不受控制,危及系統的安全穩定運行。
2.1 直流卸荷電路控制
為了防止電網故障時直流母線電壓的過度升高導致雙饋風電機組脫網,文獻[13]采用Chopper電路解決該問題,其電路原理如圖2所示。
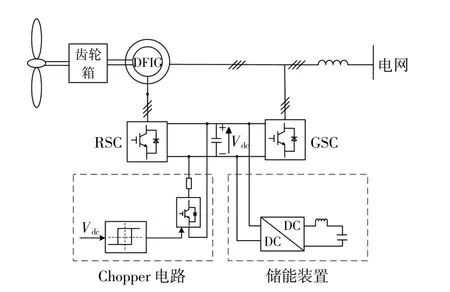
圖2 雙饋風電機組故障穿越控制框圖Fig.2 Block diagram of fault ride through control of doubly fed wind turbine
Chopper電路采用高電壓投入、低電壓返回的滯環邏輯控制晶體管的通斷,通過將電阻并聯在風機直流母線上以消耗多余沖擊功率的方式,維持了直流電壓的穩定。電阻投入與否則由直流母線電壓決定,當電網故障導致直流母線電壓高于門檻值時,卸荷電路投入運行,Chopper電阻并聯于直流母線處消耗多余能量;當直流母線電壓低于門檻值或系統處于穩定狀態時,Chopper電阻不投入運行。卸荷電路通過電阻頻繁投切的方式,將直流母線電壓維持在某一固定區間內,有效避免了直流母線電容被擊穿現象的發生,但其反復投切容易引起電壓、電流波形的畸變,且無法實現風機功率的平滑調節。
2.2 超級電容儲能控制
超級電容器作為儲能設備的一種,具有功率密度高、設備容量大、充放電時間短、循環次數多、適應溫度范圍廣的優點,適用于故障穿越的場合[19]。基于超級電容器的雙饋風機故障穿越控制策略的拓撲結構見圖2。超級電容器通過雙向DC/DC變換器連接在直流母線側,通過變流器對超級電容器的充放電控制,實現過剩有功功率的吸收,維持直流母線電壓穩定,直到電網電壓恢復正常,電壓穿越完成。當風機直流母線電壓高于設定值時,DC/DC變換器工作在降壓電路狀態,向超級電容器充電以存儲風機多余能量;當直流母線電壓低于設定值時,DC/DC變換器工作在升壓電路狀態,超級電容器向風機放電,釋放儲能以提高直流母線電壓。超級電容儲能控制阻止了故障期間直流母線電壓的升高,緩解了風機與電網間能量流動不匹配的問題,也實現了風機功率的平滑調節,但由于成本較高,不利于系統運行經濟性。
2.3 智能卸荷電路控制
為了改善直流卸荷電路和超級電容器儲能控制方案的不足,同時兼顧風機故障穿越能力和系統運行成本,本文提出了一種基于智能卸荷電路的風機故障穿越控制方法,通過動態調節故障期間智能卸荷電路吸收功率的大小,實現不同故障工況下風電機組的電壓平穩穿越。智能卸荷電路控制原理如圖3所示。
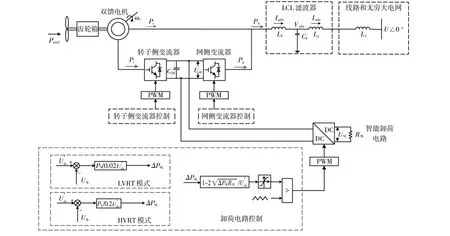
圖3 基于智能卸荷電路的雙饋風電機組故障穿越控制框圖Fig.3 Fault ride through control block diagram of doubly fed wind turbine based on smart unloading circuit
通過DC/DC變換器將固定值電阻與直流母線電壓相連。當電網電壓故障導致直流母線電壓升高時,并聯在直流母線側的智能卸荷電路啟動,通過并聯電阻消耗風機內部多余能量,直至電網電壓和風機直流母線電壓恢復正常,智能卸荷電路退出。智能卸荷電路彌補了直流Chopper電路無法完成有功功率平滑調節的缺陷,模擬了虛擬同步發電機控制原理,引入下垂控制環節,通過對DC/DC變流器的控制,在電路阻值固定的前提下實現吸收有功功率的動態調節。由于故障期間智能卸荷電路消耗盈余能量的多少主要由風機直流母線電壓值決定,因此建立了以有功功率-直流母線電壓(PSL-Udc)為聯系的下垂控制,以此動態平衡風機內部有功功率,維持直流母線電壓穩定。
考慮到LVRT和HVRT均會使得直流母線電壓Udc升高,又由于兩種情況下直流母線電壓允許最大偏差不同,下垂系數KD也有所差別,因此智能卸荷電路設置了LVRT和HVRT兩種模式。在下垂系數KD選擇上,考慮到HVRT會導致網側變流器耐高壓調節能力達到上限,引發變流器過調制、機組失穩和功率交直流耦合振蕩,因此結合風電機組HVRT范圍(1.1~1.3 p.u.)及電壓波動幅值(0.2 p.u.),在穿越過程中為直流母線電壓留有波動裕量,按照Udc最大抬升值為0.2 p.u.設置下垂系數,進而將調制比控制在合理范圍內。而在LVRT模式下,交流電壓下降,不存在網側變流器失控情況,故直流母線電壓可盡量維持恒定,下垂系數以其最大偏差值設置為0.02 p.u.。本文有功功率-直流母線電壓下垂控制關系式為
式中:ΔPSL為智能卸荷電路有功功率調節值;ΔUdc為風機直流母線電壓偏差值;KD為下垂控制系數。
本文根據式(1)不同工況下,以直流母線電壓為控制電路的輸入量時,確定智能卸荷電路有功功率期望值。
占空比D計算式為
式中:ΔUSL為智能卸荷電路電壓;RSL為智能卸荷電路電阻。
將功率-電壓下垂控制環節輸出的功率指令換算成占空比信號,與三角載波信號進行比較,產生DC/DC變流器控制電路的脈寬調制信號,控制智能卸荷電路電壓USL按期望值實時調整,保證即使在電路電阻固定的情況下,電路吸收有功功率也能依據直流母線電壓波動及時調整,進而實現故障期間智能卸荷電路有功功率的平滑調節。智能卸荷電路運行期間,等效電路如圖4所示。變換器開關管SC1工作于PWM方式時,開關管SC2工作于二極管模式,此時可看做是Buck電路。
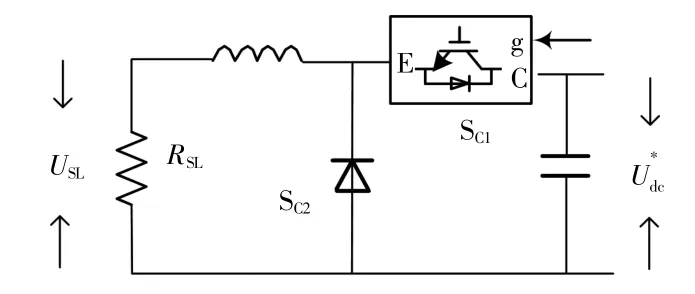
圖4 Buck型智能卸荷電路Fig.4 Buck smart unloading circuit
實現風電機組故障穿越功能,除了維持風機內部有功功率平衡外,也需要風電機組向電網提供動態無功支撐、助力電壓恢復。智能卸荷電路以現有電網對風機的無功支撐要求為依據,故障穿越期間對轉子側和網側變流器采用了如下控制手段。
①系統正常運行時,網側變流器采用單位功率因數方式運行,僅向電網輸出有功功率。當電網電壓跌落至額定電壓的20%~90%時,風機開啟LVRT模式,網側變流器由單位功率運行切換為無功調節狀態,優先發出無功功率,支撐電壓恢復。此時,網側變流器無功電流動態響應并網點電壓波動,根據標準要求,其參考值為
式中:Ug為并網點電壓標幺值;IN為網側變流器額定電流;K1為無功電流動態調節系數,一般取值為1.5~3。
②當電網電壓驟升至額定電壓的110%~130%時,風機開啟HVRT模式,網側變流器處于無功調節狀態,優先吸收無功功率,支撐電壓并網恢復。此時,網側變流器無功電流的參考值為
式中:K2為無功電流動態調節系數,其取值應大于1.5。
由于變流器容量有限,當開啟無功功率優先模式時,無功電流輸出增加,有功電流輸出必然會減少。因此,為保證變流器安全運行,通過式(3)對有功功率進行限制,有功電流參考值為
式中:Imax為變流器允許流過最大電流。
與Chopper電路相比,智能卸荷電路在電阻不變的前提下增設了DC/DC變流器,而在選擇DC/DC變流器額定功率時,考慮到重度故障下存在風機轉子側變流器均輸出無功功率、盈余有功功率需經過DC/DC變流器流入電路電阻的工況,設置DC/DC變流器參數和轉子側變流器相同。以1.5 MW雙饋風電機組為例,某廠家采用額定功率為480 kW的轉子側變流器價格如表3所示。

表3 超級電容器和變流器單價Table 3 Unit price of super capacitor and converter
智能卸荷電路大約需增加經濟成本38.4萬元。相較于超級電容器控制,智能卸荷電路在控制電路變換器不變的前提下,用固定阻值電阻替代超級電容器。超級電容器控制策略選擇參數時,考慮到風機故障穿越時間較短(一般不超過2 s),超級電容器容量設為480 kW×2 s,額定功率與變流器相同為480 kW,其經濟投入約為73萬元。智能卸荷電路雖比Chopper多投入了變流器成本,但保證了風機功率的平滑調節,并且相較于超級電容器控制,經濟成本大大降低。
3 仿真驗證及分析
本文在Matlab/Simiulink系統中搭建了圖3的雙饋風機并網模型,對所提故障穿越控制策略進行驗證。雙饋風電機組參數如下:額定功率為1.5 MW,額定頻率為50 Hz,機端額定電壓為690 V,直流母線電壓為1 150 V。定子電阻為0.007 06 p.u.,定子漏感為0.171 p.u.,轉子電阻為0.005 p.u.,轉子漏感為0.156 p.u.,互感為2.9 p.u.。
本文分別設置了電壓跌落、電壓驟升、輕度故障、重度故障工況進行仿真分析,同時將智能卸荷電路的電壓穿越效果與Chopper電路、超級電容器儲能控制方案進行對比,從直觀數據上驗證智能卸荷電路故障穿越控制的可行性與優勢。
3.1 輕度故障
設置3 s時電網發生電壓突增或驟降的輕度故障,故障持續時間0.4 s,電壓變化幅度均為15%。圖5顯示了風電機組在輕度LVRT,HVRT時直流側母線電壓、網側變流器輸出功率、定子功率的仿真結果。
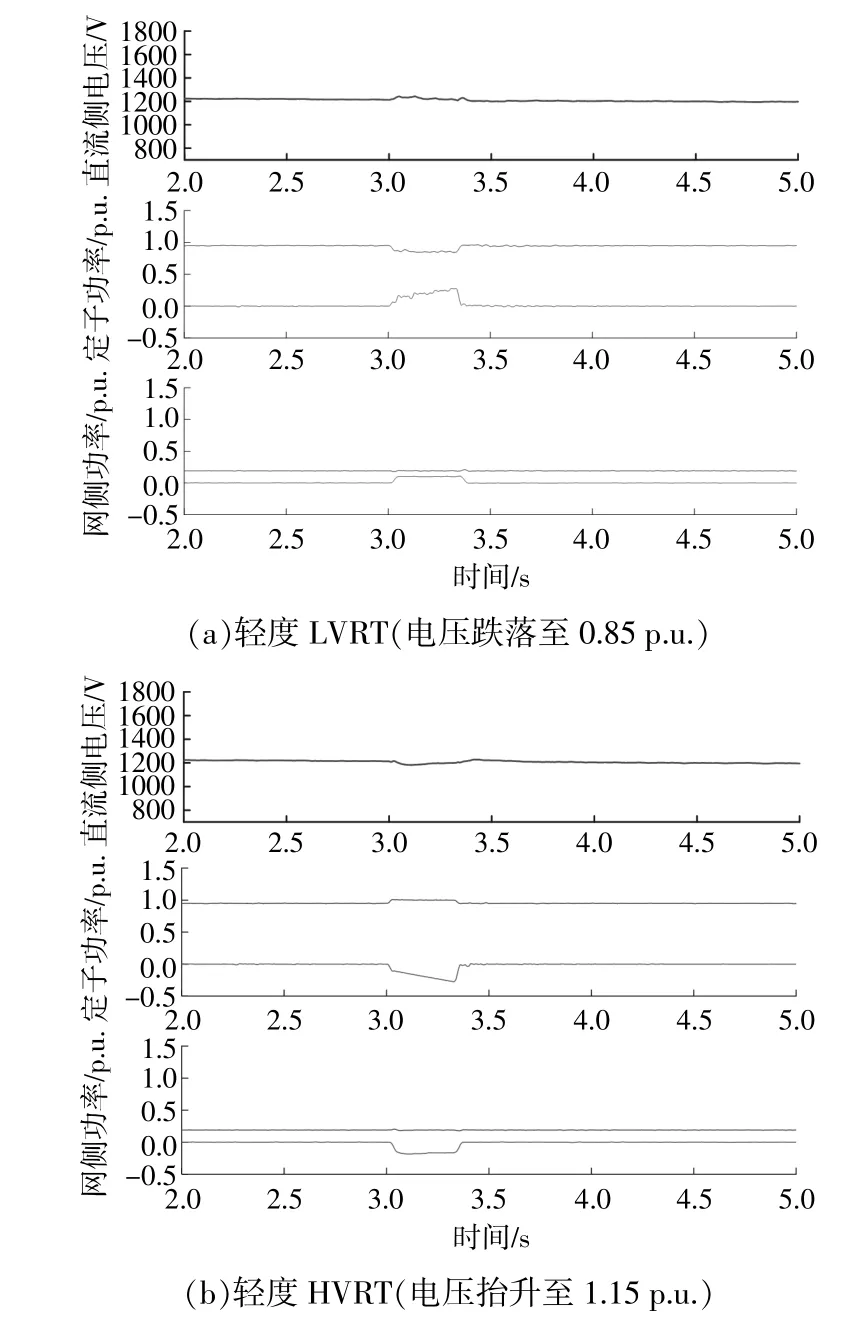
圖5 輕度LVRT/HVRT風電機組仿真波形Fig.5 DFIG Simulation waveform in mild LVRT/HVRT
由圖5可以看出,當電網電壓跌落至0.85 p.u.時,直流母線電壓上升至1 250 V,直流電壓變化幅度未超過設定上限值。因此,無論是Chopper電路、超級電容器控制電路或是智能卸荷電路,均不投入運行,并網點電壓和風機運行參數變化曲線完全一致。而當并網點電壓抬升至1.15 p.u.時,直流母線電壓有輕微下跌,但此時風機故障穿越控制電路仍然不啟動。因此,3種控制方案下風機功率、電流參數基本一致,與風電機組無故障穿越控制相同。由仿真結果可以看出,在輕度故障下,由于直流母線電壓的變化未超過上限值,因此3種故障穿越控制電路均不啟動,風機運行狀況相同。
3.2 重度故障
圖6為系統在3 s時電網電壓驟降至0.2 p.u.、發生持續時間0.4 s的重度故障時,雙饋風電機組在Chopper電路、超級電容器控制和智能卸荷電路控制下的仿真結果。
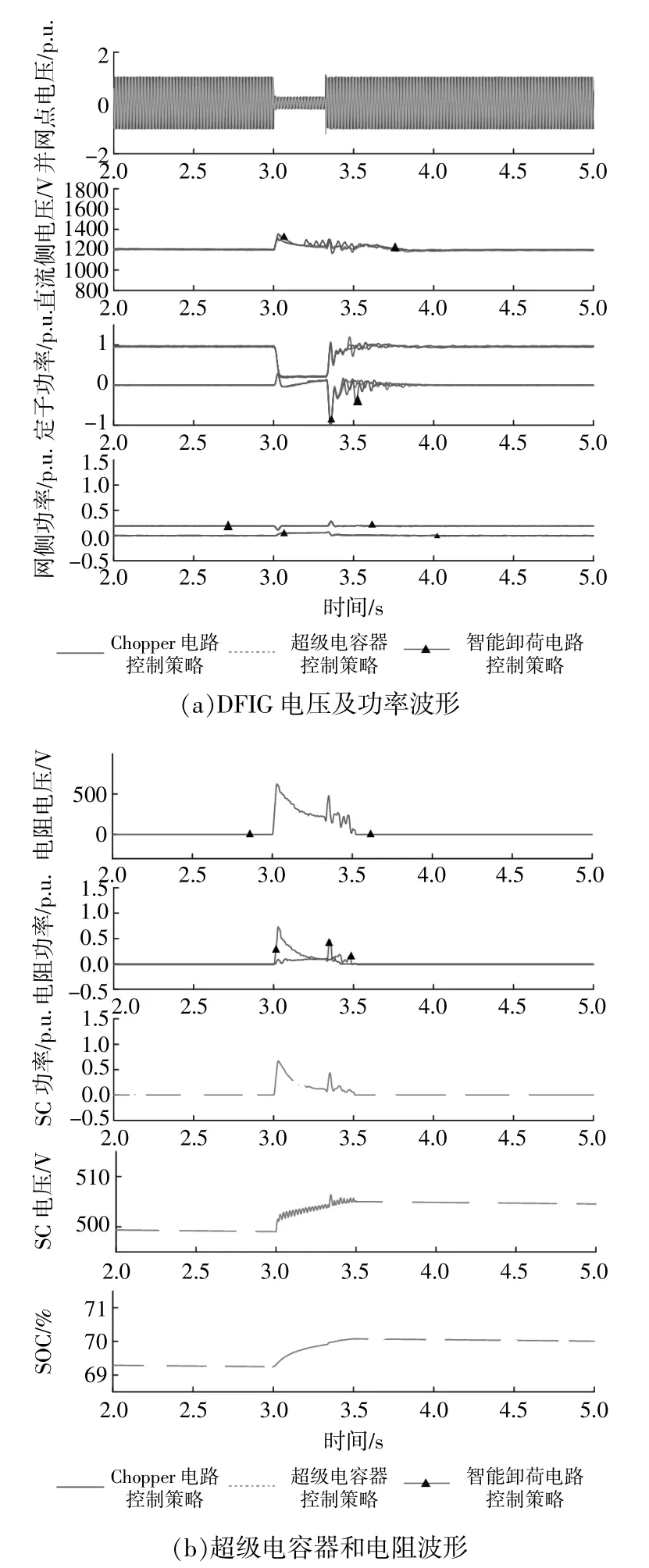
圖6 低電壓重度穿越故障仿真波形(電壓跌落至0.2 p.u.)Fig.6 Simulation waveform of low voltage severe ride through fault(voltage drop to 0.2 p.u.)
由圖6可知,在電壓跌落至0.2 p.u.的重度故障下,Chopper電路啟動,流經電路電阻的功率也隨之增加,最高值可達0.12 p.u.。故障期間,直流側母線電壓在1 180~1 320 V波動,有效抑制了直流母線電壓大幅度升高,也使得網側和定子輸出功率較為穩定,保證風電機組并網不脫機運行。采用超級電容器控制策略時,通過增加超級電容器電壓及其荷電狀態(State of Charge,SOC)吸收多余能量,故障結束后超級電容器電壓由500 V升高到了505 V,SOC增加了1%,系統通過網側變流器向超級電容器充電以平衡風機內部有功功率,從而實現了雙饋風電機組的低電壓故障穿越。采用智能卸荷電路控制時,電路中電阻兩端電壓隨著直流母線電壓的波動而變化,其變化趨勢基本一致。當直流母線電壓在3.1 s達到最大值1 370 V時,電路電阻電壓為610 V,吸收功率達到最大值0.71 p.u.,通過電路電阻吸收多余能量,使得風機直流側母線電壓得到了明顯的抑制,實現了重度故障下風電機組的LVRT。
設置電網電壓在3 s時驟升至1.3 p.u.,故障持續0.4 s,圖7顯示了重度故障下3種控制方案的仿真結果。
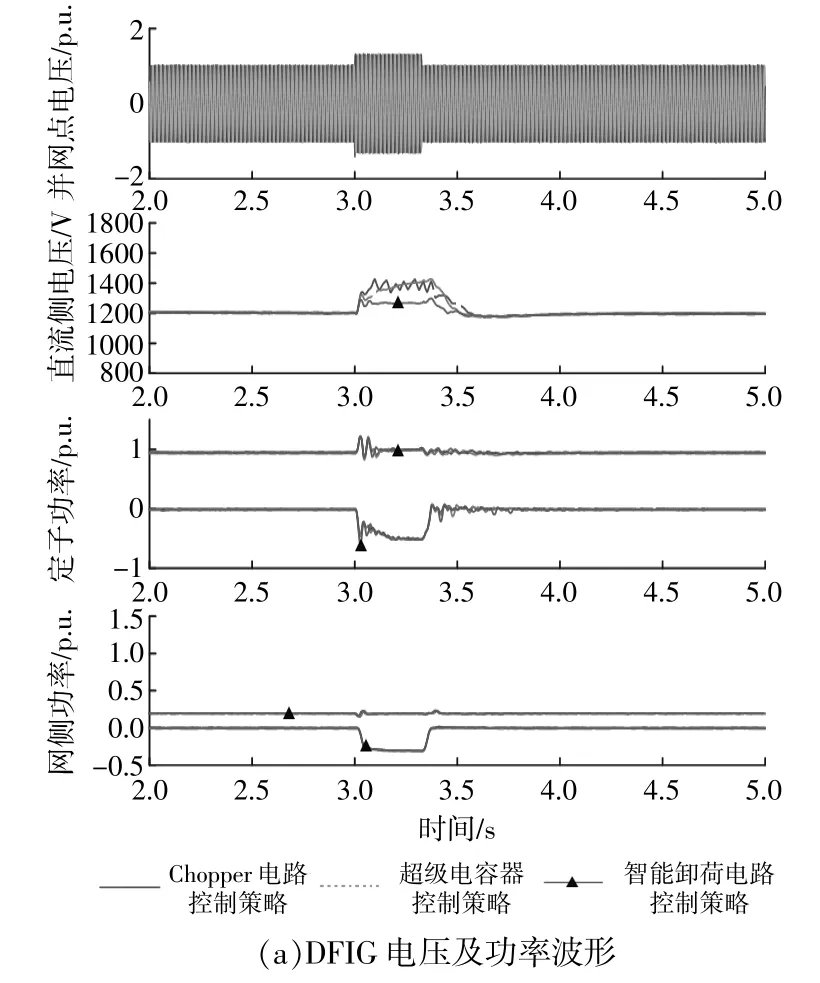
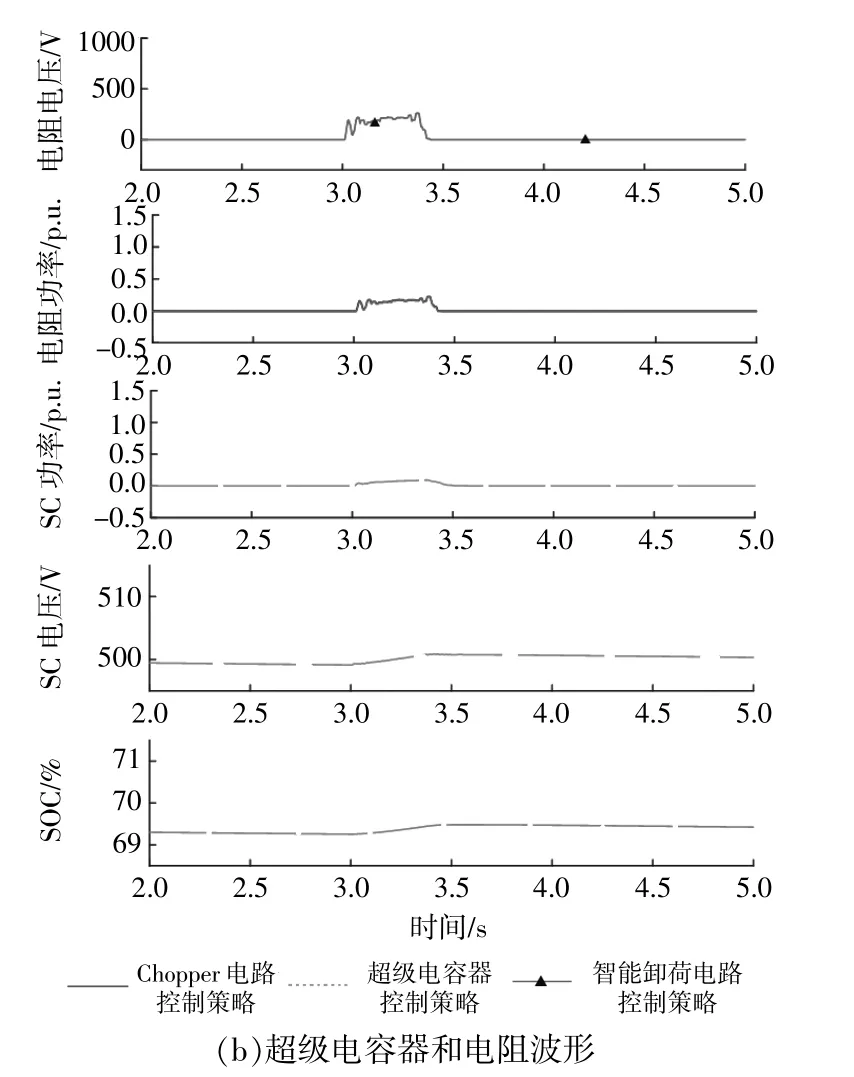
圖7 高電壓重度穿越故障仿真波形(電壓抬升至1.3 p.u.)Fig.7 Simulation waveform of high voltage severe ride through fault(voltage rises to 1.3 p.u.)
由圖7可知,直流母線電壓峰值超過了1.1 p.u.,為了防止直流母線電壓過高而損壞其他硬件裝置,Chopper電路投入運行,通過提高電路中電阻功率來平衡系統能量,增加風電機組運行可靠性,電阻功率最高達到了0.11 p.u.。3.4 s時直流母線電壓低于設定的下限值,Chopper電路自動切除,風機故障穿越結束。超級電容器在故障導致直流母線電壓超過設定值即3 s時啟動,其電壓和SOC緩慢增加,實現雙饋風電機組的高電壓故障穿越。而在故障切除后,超級電容器退出運行,其電壓和SOC分別在605 V和69.5%保持恒定,系統恢復正常運行。當雙饋風電機組采用智能卸荷電路實現機組故障穿越時,電阻電壓隨著風機直流母線電壓的上升而增加,流經電阻功率隨著電壓波形變化相應上升,在3.39 s時達到峰值。從仿真波形上看,直流側母線電壓相較于固定阻值的Chopper電路和超級電容器控制得到了較為明顯的改善,最大值由1 410 V降到了1 290 V,風電機組實現了高電壓故障穿越的能力。
3.3 對比分析
為了更為清晰直觀的對比轉子卸荷電路、直流Chopper電路、超級電容器控制和智能卸荷電路的仿真效果,圖8~10分別給出了上述4種控制策略下風電機組在重度HVRT/LVRT故障過程中并網點電壓Us、定子功率Ps和Qs、網側功率Pg和Qg以及直流母線電壓Udc等參數的最大偏差量、平均偏差量和恢復過程調節時間的對比。
圖8 不同控制下風機故障穿越參數最大偏差量Fig.8 Maximum deviation of DFIG fault ride through parameters under different control strategies
由圖8可以看出,無論是重度HVRT或LVRT故障,4種控制方案的網側無功功率Qs及并網點電壓Us的最大偏差量幾乎相等,HVRT下Qs最大偏差為0.31 p.u.,Us最大偏差為0.28 p.u.,LVRT下Qs最大偏差為0.13 p.u.,Us最大偏差為0.8 p.u.。而對于直流側母線電壓Udc,4種控制方案相差較大,HVRT下智能卸荷電路的Qs最大偏差值最小,為0.15 p.u.,相較于轉子卸荷電路幾乎下降了50%,調節效果大大提高。LVRT下,Qs偏差值最大的仍是轉子卸荷電路,為0.21 p.u.,智能卸荷電路和超級電容器儲能控制效果相當,為0.17 p.u.,略高于Chopper電路。對比說明,在Qs波動幅值上,智能卸荷最為穩定,轉子卸荷電路變化幅度最大。
圖9顯示了故障穿越過程中風機參數的平均偏差量。

圖9 不同控制下風機故障穿越參數平均偏差量Fig.9 Average deviation of DFIG fault ride through parameters under different control strategies
重度HVRT工況下,4種方案的并網點電壓Us和轉子側無功功率Qg平均偏差量相當,分別為0.25 p.u.和0.28 p.u.,而在網側有功功率Ps和轉子側有功功率Pg上,轉子卸荷電路的平均偏差量最大,是其他3種方案的2倍。直流母線電壓Udc和網側無功功率Qs平均偏差量最少的是智能卸荷電路和超級電容器控制,分別為0.09 p.u.和0.41 p.u.。重度LVRT工況下,Chopper電路、超級電容器控制和智能卸荷電路的風機參數平均偏差量均相等,且Udc和Qs均明顯優于轉子卸荷電路。從風機參數的平均偏差量看,智能卸荷電路和超級電容器控制在故障穿越過程中的整體波動較為平穩。
圖10對比了4種電壓穿越控制方案下風機故障后恢復穩態所需時間。

圖10 不同控制下風機故障穿越恢復過程的調節時間Fig.10 Adjustment time of DFIG fault through recovery process under different control strategies
重度HVRT下,直流母線電壓Udc恢復穩定用時最短的是智能卸荷電路和超級電容器控制,需要0.4 s,優于Chopper電路的0.58 s和轉子卸荷電路的0.98 s。網側功率恢復穩定用時最短的仍是智能卸荷電路,4種方案的轉子側功率用時相當,為0.11 s。重度LVRT工況下,轉子卸荷電路的Udc、定子側功率所需調節時間最短,其次為智能卸荷電路,但在網側功率參數上,轉子卸荷電路恢復穩態用時最長為0.78 s,其他3種方案用時在0.58 s左右。
綜合對比圖8~10重度故障下風機穿越過程中的參數,智能卸荷電路的直流母線電壓抑制效果最佳,功率波動幅值最小,且能在最短時間內完成恢復調節,電壓穿越方案最具優勢,超級電容器控制其次,且明顯優于其他兩種方案。
圖11對比了重度故障工況下,雙饋風電機組轉子側變流器的電流波形。
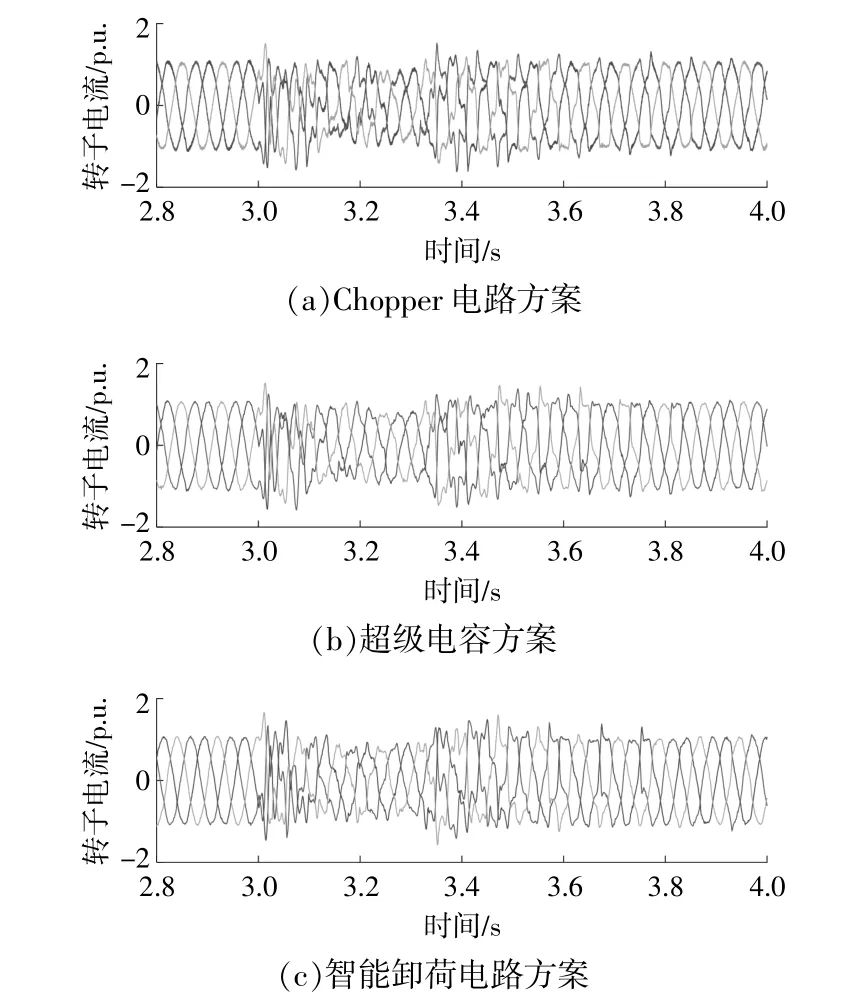
圖11 重度故障下DFIG 3種方案轉子側變流器波形對比Fig.11 DFIG rotor side converter waveform comparison of three schemes under severe fault
由圖11可見,智能卸荷電路和超級電容儲能方案的轉子電流波形較為平緩,故障期間電流波動幅值小、次數少,而Chopper電路控制方案由于頻繁投切產生了直流電壓紋波,進而使得電流波形畸變嚴重。因此,綜合對比風電機組直流母線電壓抑制效果、電壓恢復所需調節時間、轉子電流畸變程度以及控制方案經濟成本等多種因素,所提基于智能卸荷電路的風電機組故障穿越控制策略最具優勢。
4 結論
本文結合Chopper電路和超級電容儲能控制的優勢,提出了基于智能卸荷電路的風電機組高低電壓故障穿越技術方案。所提方法對Chopper電路進行改造,通過DC/DC變換器將卸荷電阻與風機直流母線相連,并在控制電路中設置有功功率-直流電壓下垂環節,使得智能卸荷電路能夠根據直流母線電壓幅值動態吸收盈余能量,具有平滑調節卸荷功率的能力。同時依據并網點電壓波動情況自動開啟LVRT或HVRT模式,保證雙饋風電機組在不同故障下均能成功穿越。本文在仿真系統中搭建了單機并網場景模型,對比了3種不同故障穿越方案的動態響應性能。結果表明,重度故障下,所提智能卸荷電路方案的故障穿越控制效果可以與超級電容控制方案相媲美,有效避免了Chopper電路頻繁投切引起的直流母線電壓波動以及網側電壓、電流波形畸變,也大大降低了經濟成本。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39