養(yǎng)殖工船作業(yè)型水下機(jī)器人結(jié)構(gòu)設(shè)計(jì)與研究
2024-03-06 01:45:26張佳奇謝永和李德堂高煒鵬王云杰洪永強(qiáng)
南方水產(chǎn)科學(xué) 2024年1期
張佳奇,謝永和,李德堂,高煒鵬,陳 卿,王 君,王云杰,洪永強(qiáng)
1. 浙江海洋大學(xué) a. 海洋工程裝備學(xué)院,b. 船舶與海運(yùn)學(xué)院,浙江 舟山316022
2. 中國(guó)水產(chǎn)科學(xué)研究院漁業(yè)機(jī)械儀器研究所,上海 200092
占地球表面積71% 的海洋蘊(yùn)藏著豐富的生物、礦物和能源等資源,是人類繁衍生息和持續(xù)發(fā)展的重要基礎(chǔ)[1-2]。我國(guó)是海洋大國(guó),豐富的海洋資源為水產(chǎn)養(yǎng)殖提供了天然的資源基礎(chǔ)[3]。樹(shù)立大食物觀,建設(shè)海洋牧場(chǎng),是推進(jìn)我國(guó)糧食安全戰(zhàn)略的重要保障。近年來(lái),我國(guó)重視發(fā)展深遠(yuǎn)海綠色養(yǎng)殖,鼓勵(lì)深遠(yuǎn)海大型智能化養(yǎng)殖平臺(tái)建設(shè),使深遠(yuǎn)海養(yǎng)殖逐漸朝機(jī)械化、自動(dòng)化、信息化方向發(fā)展[4-5]。其中,最具代表性的是養(yǎng)殖工船養(yǎng)殖裝備的設(shè)計(jì)與研發(fā)。養(yǎng)殖艙內(nèi)的水質(zhì)檢測(cè)是養(yǎng)殖工船作業(yè)的關(guān)鍵環(huán)節(jié)。水質(zhì)環(huán)境中溫度、pH、溶解氧(DO)、氨氮等是影響魚(yú)類生長(zhǎng)的重要因素[6-8],實(shí)時(shí)水質(zhì)監(jiān)測(cè)可控制養(yǎng)殖艙的水環(huán)境,降低水產(chǎn)養(yǎng)殖風(fēng)險(xiǎn),提高養(yǎng)殖效益。
水下機(jī)器人又稱無(wú)人遙控潛水器,是一種在水下作業(yè)的機(jī)器人,它可在常規(guī)技術(shù)不能到達(dá)的深度或區(qū)域進(jìn)行綜合考察和研究,能自主完成多種作業(yè)使命,成為探索、開(kāi)發(fā)和利用海洋的重要手段之一[9-10]。目前,水下機(jī)器人已應(yīng)用于多場(chǎng)景海洋作業(yè)中,如水下礦物、礦石和水下考古觀測(cè)[11],海底電纜鋪設(shè)[12],石油和天然氣工業(yè)[13],在軍事、漁業(yè)等領(lǐng)域也占據(jù)舉足輕重的地位[14-16]。在水產(chǎn)養(yǎng)殖中,利用水下機(jī)器人進(jìn)行水質(zhì)監(jiān)測(cè),可明顯提升監(jiān)測(cè)的靈活性、效率和范圍。王懿偲等[17]設(shè)計(jì)了一款監(jiān)測(cè)水質(zhì)與魚(yú)群活動(dòng)的機(jī)械魚(yú)機(jī)器人,搭建了機(jī)器魚(yú)三維路徑跟蹤控制系統(tǒng)和誤差模型,以及控制精度高和魯棒性強(qiáng)的模糊滑模控制器,但鑒于實(shí)際試驗(yàn)環(huán)境中干擾更加復(fù)雜,需進(jìn)一步優(yōu)化算法。劉寧等[18]開(kāi)發(fā)了一款用于定期水質(zhì)監(jiān)測(cè)的新型蛇形機(jī)器人,采用仿生蛇形和沉浮結(jié)構(gòu)設(shè)計(jì),分析和模擬了蛇形機(jī)器人的穩(wěn)定性,為水下機(jī)器人的結(jié)構(gòu)設(shè)計(jì)提供了全新的思路,但其無(wú)法滿足定點(diǎn)懸停采樣以及實(shí)時(shí)監(jiān)測(cè)。李翔飛和戴逸飛[19]構(gòu)建了一款用于監(jiān)測(cè)水下環(huán)境的六足水下機(jī)器人,其控制系統(tǒng)使用Python 程序?qū)Σ綉B(tài)進(jìn)行控制,采用仿生結(jié)構(gòu)將水底行走與水中游動(dòng)相結(jié)合,可代替人工水下作業(yè),但其作業(yè)深度受限。Ravalli 等[20]開(kāi)發(fā)了一種用于水質(zhì)監(jiān)測(cè)和預(yù)警的多傳感器仿生魚(yú)機(jī)器人,在結(jié)構(gòu)上將pH 傳感器與改良后的聚苯胺傳感器同水下機(jī)器人相結(jié)合,將采集的信號(hào)轉(zhuǎn)換為電子信號(hào)控制水下機(jī)器人,利用多傳感器平臺(tái)對(duì)環(huán)境中的氫離子 (H+) 濃度進(jìn)行檢測(cè),但檢測(cè)的參數(shù)較少。Jo 等[21]提出了一種新的、完全開(kāi)源、低成本、小型無(wú)人水面飛行器 (Unmanned Surface Vessel, USV),用于實(shí)時(shí)測(cè)量近地表水質(zhì),USV 設(shè)計(jì)的硬件和軟件均為開(kāi)源,開(kāi)發(fā)Android 程序通過(guò)藍(lán)牙控制USV,可實(shí)現(xiàn)自主導(dǎo)航并顯示傳感器和GPS 數(shù)據(jù),但其使用場(chǎng)景受限。Huang 等[22]設(shè)計(jì)了一種用于水產(chǎn)養(yǎng)殖水質(zhì)檢測(cè)的機(jī)器人,采用開(kāi)放式框架結(jié)構(gòu)設(shè)計(jì)、三螺旋槳推進(jìn)方式,機(jī)器人配備水質(zhì)檢測(cè)模塊,采集定點(diǎn)位置的淡水水溫、pH、DO 等參數(shù),但實(shí)際作業(yè)中無(wú)法實(shí)現(xiàn)實(shí)時(shí)監(jiān)測(cè)。
目前,水質(zhì)檢測(cè)技術(shù)正向多元化、智能化、信息化方向發(fā)展[23-24],但存在技術(shù)不成熟、運(yùn)營(yíng)成本高、普及范圍小、水質(zhì)污染嚴(yán)重等問(wèn)題[25]。現(xiàn)今水質(zhì)監(jiān)測(cè)主要靠人工采集,再進(jìn)行儀器檢測(cè),雖然準(zhǔn)確度高,但效率低且周期長(zhǎng);另一種方式是采用傳感器網(wǎng)絡(luò)技術(shù),在檢測(cè)區(qū)域布置各類水質(zhì)監(jiān)測(cè)傳感器,可以實(shí)現(xiàn)實(shí)時(shí)檢測(cè),卻無(wú)法實(shí)現(xiàn)水質(zhì)分層監(jiān)測(cè),而且傳感器費(fèi)用較高,作業(yè)區(qū)域也受限。基于上述問(wèn)題,本研究設(shè)計(jì)了一款流線型作業(yè)型纜控水下機(jī)器人 (Remotely operated vehicle, ROV),將ROV 和多參數(shù)水質(zhì)監(jiān)測(cè)傳感器組結(jié)合,搭建了一套完整的水質(zhì)檢測(cè)系統(tǒng),通過(guò)抽水方式將采集水樣輸送到采樣桶,然后由多參數(shù)傳感器組和上位機(jī)軟件實(shí)時(shí)監(jiān)測(cè)水溫、pH、DO 及鹽度參數(shù),可解決水產(chǎn)養(yǎng)殖中水質(zhì)檢測(cè)結(jié)果的片面性、局部性等問(wèn)題,且能實(shí)現(xiàn)5 自由度靈活運(yùn)動(dòng),可在不同深度下完成分層水質(zhì)抽樣檢測(cè);利用多參數(shù)傳感器監(jiān)測(cè)系統(tǒng)可以實(shí)時(shí)監(jiān)測(cè),同時(shí)具有觀察魚(yú)類生長(zhǎng)環(huán)境和監(jiān)控作業(yè)的功能,可提升養(yǎng)殖成效,助力海洋牧場(chǎng)建設(shè)。
1 ROV 系統(tǒng)方案設(shè)計(jì)
1.1 ROV 水質(zhì)檢測(cè)系統(tǒng)設(shè)計(jì)
ROV 整體水質(zhì)檢測(cè)系統(tǒng)由多參數(shù)水質(zhì)監(jiān)測(cè)傳感器組和水下機(jī)器人組成,多參數(shù)水質(zhì)監(jiān)測(cè)傳感器組檢測(cè)采樣的水質(zhì),水下機(jī)器人 (ROV) 為采樣的載體。該水質(zhì)監(jiān)測(cè)系統(tǒng)作業(yè)過(guò)程為:在養(yǎng)殖艙甲板或岸上安裝多參數(shù)水質(zhì)監(jiān)測(cè)傳感器組,用水管搭載到機(jī)器人載體上,依靠機(jī)器人的高機(jī)動(dòng)性通過(guò)手柄操控在養(yǎng)殖艙內(nèi)到達(dá)不同的水層,經(jīng)自吸泵吸水輸送到傳感器組,對(duì)水質(zhì)的DO、溫度、pH、鹽度進(jìn)行監(jiān)測(cè),利用上位機(jī)軟件實(shí)現(xiàn)水質(zhì)參數(shù)分析、記錄和儲(chǔ)存功能。整體水質(zhì)檢測(cè)系統(tǒng)流程見(jiàn)圖1-a。根據(jù)3 種傳感器的結(jié)構(gòu)尺寸設(shè)計(jì)對(duì)應(yīng)的固定結(jié)構(gòu),將傳感器組固定在同一水平線上,保證水質(zhì)參數(shù)采集數(shù)據(jù)的一致性和準(zhǔn)確性,將3 個(gè)傳感器通過(guò)螺栓和螺母固定在空隙位置,可以根據(jù)水位高低調(diào)節(jié)傳感器組的位置,可以更換不同類型水質(zhì)傳感器獲取不同的水質(zhì)參數(shù)。整體傳感器組見(jiàn)圖1-b。
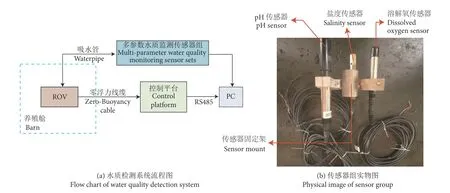
圖1 ROV 水質(zhì)檢測(cè)系統(tǒng)設(shè)計(jì)Fig. 1 Design of ROV water quality detection system
1.2 ROV 系統(tǒng)設(shè)計(jì)
1.2.1 ROV 設(shè)計(jì)參數(shù)指標(biāo)
ROV 整體采用流線型外殼結(jié)構(gòu)設(shè)計(jì),由6 個(gè)推進(jìn)器、2k 分辨率的攝像頭和可調(diào)節(jié)亮度的照明燈等組成。根據(jù)設(shè)計(jì)指標(biāo),要求ROV 可以滿足多自由度運(yùn)動(dòng)包括升潛、轉(zhuǎn)舵、進(jìn)退、回轉(zhuǎn)和橫搖等5 個(gè)自由度;可以實(shí)現(xiàn)在指定位置懸停并配合水管進(jìn)行抽水作業(yè);能夠拍攝水下視頻并傳輸記錄水底場(chǎng)景,同時(shí)記錄ROV 水下姿態(tài)角、水下深度等信息。具體設(shè)計(jì)指標(biāo)見(jiàn)表1。
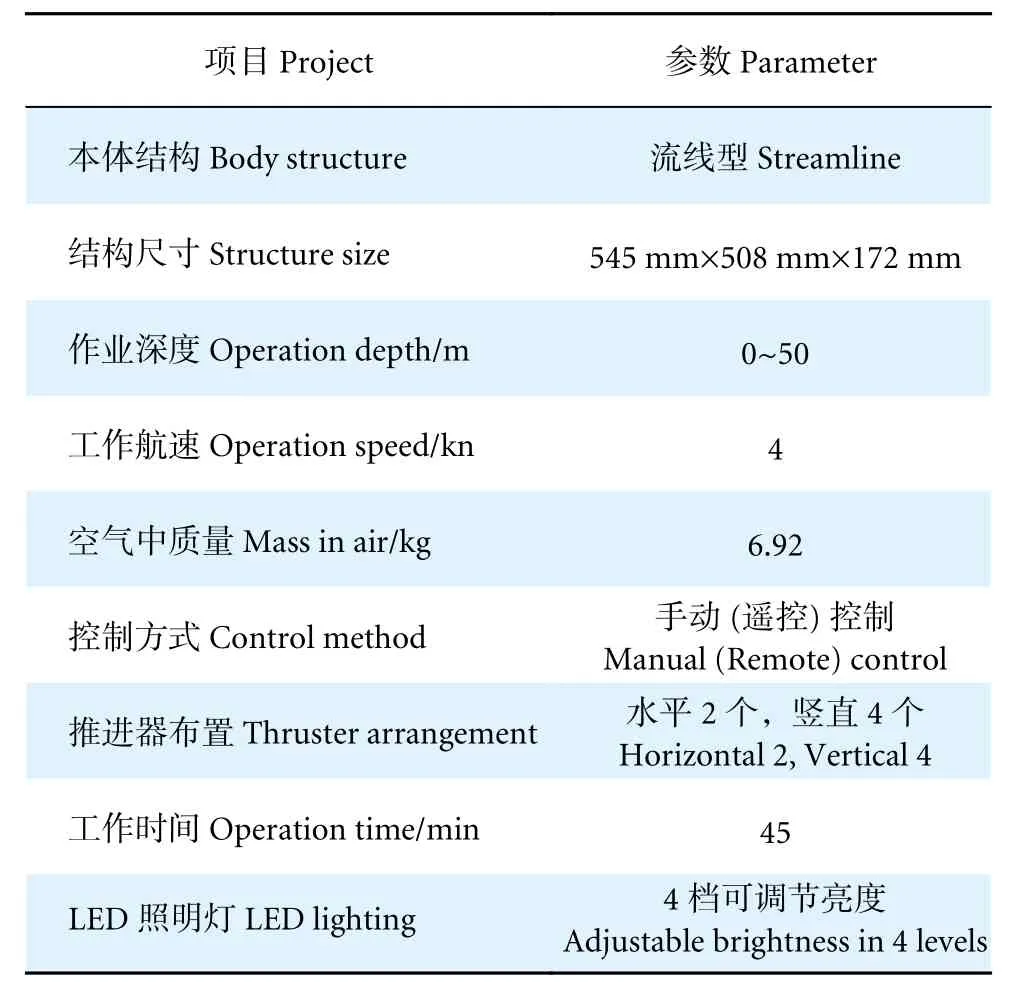
表1 ROV 整體設(shè)計(jì)參數(shù)指標(biāo)Table 1 Parameter indicators of ROV overall design
1.2.2 ROV 系統(tǒng)組成
ROV 通過(guò)內(nèi)部蓄電池為其供電,通過(guò)線纜為上位機(jī)發(fā)送信號(hào)指令并將收集的圖像、傳感器信號(hào)以及位置等信息傳送給上位機(jī),通過(guò)人機(jī)交互界面直觀、清楚、準(zhǔn)確地反映水下環(huán)境。ROV主要由水下機(jī)器人本體、線纜以及PC 端上位機(jī)組成。ROV 系統(tǒng)主要由動(dòng)力系統(tǒng)、觀測(cè)及照明系統(tǒng)、控制系統(tǒng)、外殼結(jié)構(gòu)和抽水檢測(cè)結(jié)構(gòu)等組成。ROV 具體系統(tǒng)組成及系統(tǒng)設(shè)計(jì)流程圖分別見(jiàn)圖2、圖3。
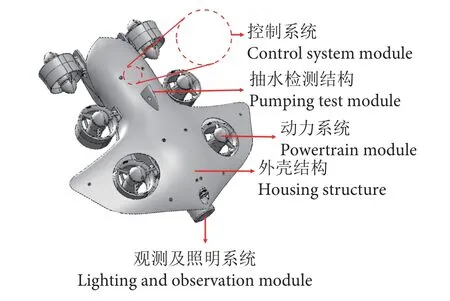
圖2 ROV 系統(tǒng)組成Fig. 2 ROV system composition
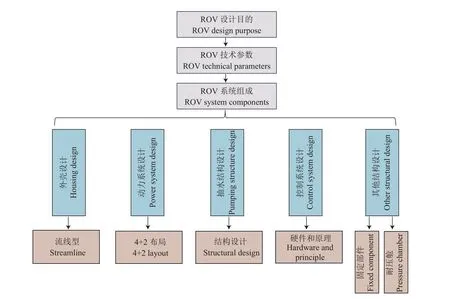
圖3 ROV 系統(tǒng)設(shè)計(jì)流程圖Fig. 3 Flowchart of ROV system design
2 ROV 機(jī)械結(jié)構(gòu)設(shè)計(jì)
2.1 外殼設(shè)計(jì)
小型水下機(jī)器人具有運(yùn)動(dòng)速度敏捷、機(jī)動(dòng)性高等特點(diǎn),外殼作為水下機(jī)器人的重要載體與水直接接觸,流線型外殼設(shè)計(jì)更好地滿足了運(yùn)動(dòng)要求。由于本研究設(shè)計(jì)的外殼模型呈現(xiàn)不規(guī)則形狀較多,且對(duì)水下壓力要求較小,結(jié)合實(shí)際需求,選擇采用高強(qiáng)度ABS[26-27]作為外殼材料,參數(shù)見(jiàn)表2。采用Solidworks 軟件從美觀、性能、實(shí)用性等角度出發(fā)設(shè)計(jì)外殼,外殼的主體結(jié)構(gòu)包含攝像頭和照明燈外殼、抽水外殼、推進(jìn)器的外殼和固定結(jié)構(gòu)。采用光固化3D 打印技術(shù)制造外殼 (圖4)。
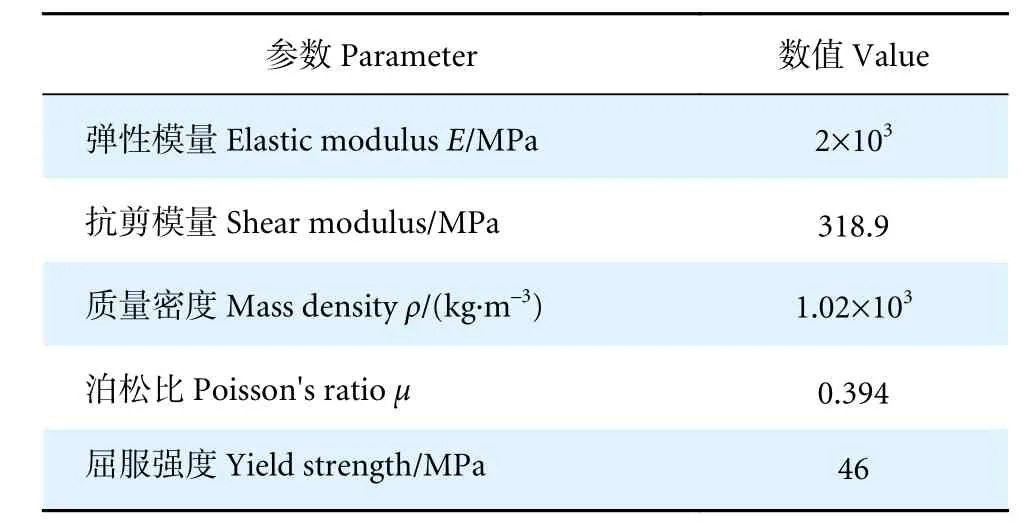
表2 ABS 物理參數(shù)Table 2 ABS physical parameters
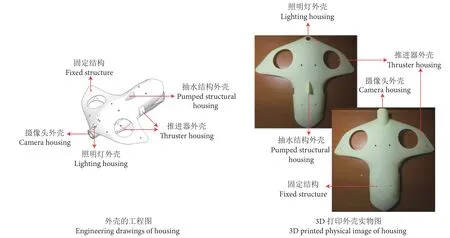
圖4 ROV 外殼Fig. 4 Housing of ROV
為驗(yàn)證外殼設(shè)計(jì)是否滿足強(qiáng)度要求,對(duì)ROV外殼進(jìn)行應(yīng)力仿真分析。利用Solidworks 軟件進(jìn)行建模并保存為IGES 格式導(dǎo)入Ansys 中;將上、下外殼定義為剛體,并定義材料屬性為ABS 材料,參數(shù)設(shè)置見(jiàn)表2;采用自動(dòng)網(wǎng)格劃分方法劃分網(wǎng)格;施加壓力載荷,需滿足水下機(jī)器人極限作業(yè)深度50 m,經(jīng)計(jì)算施加載荷壓力為0.5 MPa;將上、下蓋兩端的接口處添加固定支撐進(jìn)行求解。求解后上、下外殼等效應(yīng)力和總變形見(jiàn)圖5。
仿真分析表明,水下機(jī)器人的上、下外殼最大總變形分別為0.061 382 和0.022 448 mm (圖5-a, 5-b),屬于微小變形,可忽略不計(jì);上、下外殼最大等效應(yīng)力 (MPa) 分別為 11.01≤σs=46和4.192 3 ≤σs=46(圖5-c, 5-d),可滿足ABS 材料屈服強(qiáng)度要求。根據(jù)數(shù)值模擬可知,外殼設(shè)計(jì)滿足應(yīng)力要求,說(shuō)明整體外殼能滿足水下50 m 的強(qiáng)度和壓力要求。
2.2 動(dòng)力系統(tǒng)設(shè)計(jì)
ROV 動(dòng)力系統(tǒng)組主要由電機(jī)、推進(jìn)器、供電系統(tǒng)組成,通過(guò)蓄電池為電機(jī)提供動(dòng)能帶動(dòng)推進(jìn)器運(yùn)動(dòng),為ROV 提供在水中推進(jìn)和移動(dòng)的動(dòng)力支持。ROV 整體布局采用6 個(gè)推進(jìn)器總體設(shè)計(jì),4 個(gè)在豎直方向和2 個(gè)在水平方向,在水平和豎直方向上的2 個(gè)推進(jìn)器螺旋槳轉(zhuǎn)速不同,還能夠產(chǎn)生一定的力矩[28],豎直方向4 個(gè)推進(jìn)器提供浮潛、縱傾、俯仰和轉(zhuǎn)舵4 個(gè)自由度和水平方向2 個(gè)推進(jìn)器為機(jī)器人提供進(jìn)退自由度。為滿足ROV 水下工作條件,采用一正一反6 個(gè)推進(jìn)器,6 個(gè)推進(jìn)器布置在同一軸線上,利用板材將6 個(gè)推進(jìn)器固定在耐壓艙兩端,推進(jìn)器的工作的平均功率在270 W,最大推力為700 N。
在豎直方向推進(jìn)器的推力和扭矩表達(dá)式為:
在水平方向推進(jìn)器的推力和扭矩表達(dá)式為:
由公式(1)、(2)可知,整體ROV 的推力和扭矩表達(dá)式為:
式中:T1和T2為x軸上推進(jìn)器空間推力;T3、T4、T5和T6為z軸上推進(jìn)器空間推力;T為表示空間推力;M為力矩。
ROV 進(jìn)退自由的推力為T1+T2,浮潛推力為T3+T4+T5+T6,縱傾力矩為b(T3?T4+T5?T6),俯仰力矩為a(T1?T2) 和轉(zhuǎn)舵力矩為a(T1?T2)。總體的分布見(jiàn)圖6。
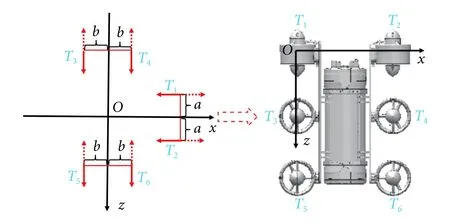
圖6 推進(jìn)器分布圖Fig. 6 Thruster setup diagram
2.3 控制系統(tǒng)設(shè)計(jì)
ROV 控制系統(tǒng)是整個(gè)系統(tǒng)的心臟,控制ROV 的執(zhí)行作業(yè)。控制硬件主要有主控制器Pixhawk、樹(shù)莓派、電力載波模塊、線纜和地面基站等組成。ROV 整體控制系統(tǒng)需要使用3.3、5、12 V 3 種電壓,通過(guò)內(nèi)置的24 V 可充電鋰電池,經(jīng)由多路DC-DC 電壓轉(zhuǎn)換模塊分壓即可獲得相應(yīng)電源。其中,5 V 電壓供電給主控制器、樹(shù)莓派和電力載波模塊,推進(jìn)器電機(jī)總功率需要在額定電壓24 V 下,3.3 V 為整體的航姿參考系統(tǒng)供電;主控制器Pixhawk 由兩片芯片STM32F427 和STM32F100 組成,STM32F427 為主芯片負(fù)責(zé)各類傳感器數(shù)據(jù)采集和處理,負(fù)責(zé)視頻傳輸和通信;ROV 的加速度計(jì)負(fù)責(zé)采集各坐標(biāo)軸角度、角速度及角加速度;深度信息利用深度計(jì)通過(guò)壓力信息解析獲取,同時(shí)可以獲取海水溫度,實(shí)現(xiàn)溫度計(jì)的功能。推進(jìn)器采用差速P75 推進(jìn)器,使用直流無(wú)刷電機(jī)并集成了電子調(diào)速器,經(jīng)由控制器STM32F100產(chǎn)生PWM 信號(hào)對(duì)水下6 個(gè)推進(jìn)器進(jìn)行控制,實(shí)現(xiàn)推進(jìn)器正反轉(zhuǎn)的控制和調(diào)速功能;主控制器和樹(shù)莓派通過(guò)USB 連接進(jìn)行通信并傳遞相應(yīng)控制信息,樹(shù)莓派3B (Raspberry Pi 3B)微型計(jì)算機(jī)搭載有1.2 Ghz 64 位ARM Cortex-A53 四核處理器,通過(guò)線纜連接到水下電力載波模塊Fathom X,F(xiàn)athom X 以太網(wǎng)通訊板可利用雙絞線完成長(zhǎng)距離的以太網(wǎng)通訊,其中一個(gè)布置于水下機(jī)器人本體,另一個(gè)布置于地面操作系統(tǒng)內(nèi),二者均用于標(biāo)準(zhǔn)以太網(wǎng)通訊與雙絞線以太網(wǎng)通訊的轉(zhuǎn)化,水下電力載波模塊將樹(shù)莓派的視頻信號(hào)轉(zhuǎn)換到兩根電力線上進(jìn)行通信,水面電力載波模塊將從電力線上傳輸過(guò)來(lái)的視頻信號(hào)轉(zhuǎn)換回網(wǎng)線接口連接至路由器上,以完成高清視頻數(shù)據(jù)的采集發(fā)送以及以太網(wǎng)接口下的數(shù)據(jù)傳輸。整體的控制原理見(jiàn)圖7。
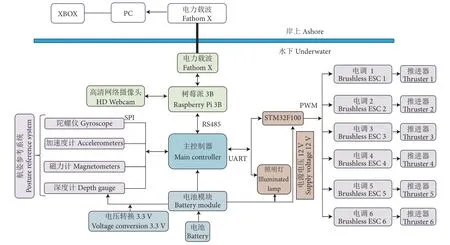
圖7 ROV 控制系統(tǒng)原理圖Fig. 7 Schematic diagram of ROV control system
姿態(tài)和深度控制是ROV 運(yùn)動(dòng)控制系統(tǒng)的重點(diǎn)和難點(diǎn),其控制效果直接影響機(jī)器人的性能。ROV的控制從全局上可以理解為對(duì)電機(jī)進(jìn)行控制,控制電機(jī)力矩的輸入和輸出。本研究采用非集中控制方式,通過(guò)4 個(gè)獨(dú)立的控制器來(lái)對(duì)ROV 的姿態(tài)和深度進(jìn)行控制,其由艏向角控制器、縱傾角控制器、橫傾角控制器和深度控制器組成 (圖8)。其中,艏向角控制器用于控制機(jī)器人在水中艏向角的平衡,它的輸出量分別等量且相反控制機(jī)器人兩側(cè)2 個(gè)垂直推進(jìn)電機(jī);縱傾角控制器用于控制機(jī)器人在水中縱傾角的平衡;橫傾角控制器用于控制機(jī)器人的偏航角;深度控制器用于控制下潛深度。4 個(gè)姿態(tài)控制器均采用PD 控制器。4 個(gè)姿態(tài)和深度控制器的輸入分別為姿態(tài)角和深度的期望值,由解算得到的姿態(tài)角和深度實(shí)際值的比較偏差,通過(guò)上位機(jī)軟件顯示再進(jìn)行調(diào)整。當(dāng)需要定深時(shí),以深度期望值與壓力傳感器測(cè)量計(jì)算得到的深度實(shí)際值比較得到的偏差,作為深度控制器的輸入量。深度控制器輸出深度控制量為PWM 信號(hào)控制電調(diào)增量,電調(diào)控制水平方向的4 個(gè)推進(jìn)器進(jìn)而控制ROV 的下潛深度。
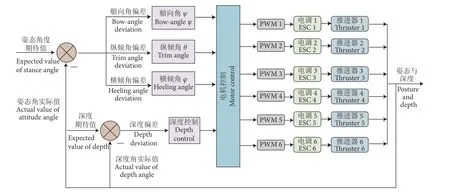
圖8 ROV 姿態(tài)和深度控制原理圖Fig. 8 Schematic diagram of ROV attitude and depth control
2.4 抽水檢測(cè)結(jié)構(gòu)設(shè)計(jì)
在ROV 外殼中端位置上采用拋物線線型設(shè)計(jì)3 口轉(zhuǎn)換吸水管口,通過(guò)轉(zhuǎn)換頭1 連接水管,2 和3 為吸水口。整體抽水采用拋物線線型設(shè)計(jì)有利于減輕流體阻力,管口整體尺寸偏小長(zhǎng)度為30 mm,寬度為60 mm,高度為45 mm,3 個(gè)管口半徑為10 mm 見(jiàn) (圖9)。
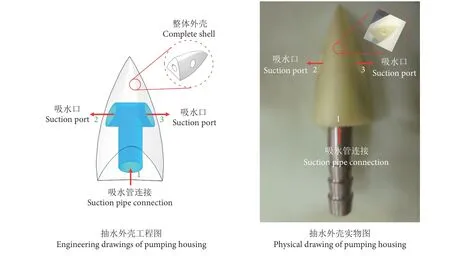
圖9 抽水外殼Fig. 9 Drawing of pumping housing
2.5 其他結(jié)構(gòu)設(shè)計(jì)
2.5.1 固定結(jié)構(gòu)設(shè)計(jì)
ROV 的固定結(jié)構(gòu)主要包括整體耐壓艙的固定、6 個(gè)推進(jìn)器同軸線固定、攝像機(jī)和照明燈固定(圖10)。其中攝像機(jī)和照明燈采用環(huán)形夾具和卡扣配合螺母固定;耐壓艙艙體采用密封艙安裝座、安裝座固定環(huán)和安裝座支撐桿組成的固定環(huán)形柱固定,防止機(jī)器人在運(yùn)動(dòng)時(shí)耐壓艙移位,頂端位置與外殼通過(guò)螺母固定;推進(jìn)器采用板材固定,板材一端和固定環(huán)形柱通過(guò)螺絲固定,另一端等距對(duì)稱固定6 個(gè)推進(jìn)器。
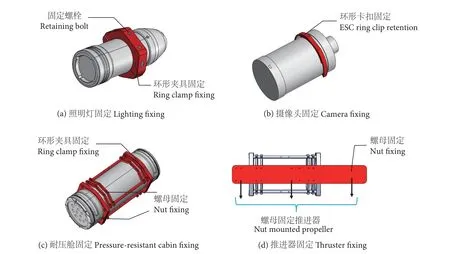
圖10 ROV 的主要的固定結(jié)構(gòu)Fig. 10 Main fixed structures of ROV
對(duì)上述固定部件進(jìn)行有限元分析,判斷是否滿足設(shè)計(jì)應(yīng)力要求。耐壓艙的固定部件材料為鋁合金,攝像機(jī)和照明燈的固定部件材料為結(jié)構(gòu)鋼,推進(jìn)器固定板材采用膠木材料。3 種材料的參數(shù)見(jiàn)表3。
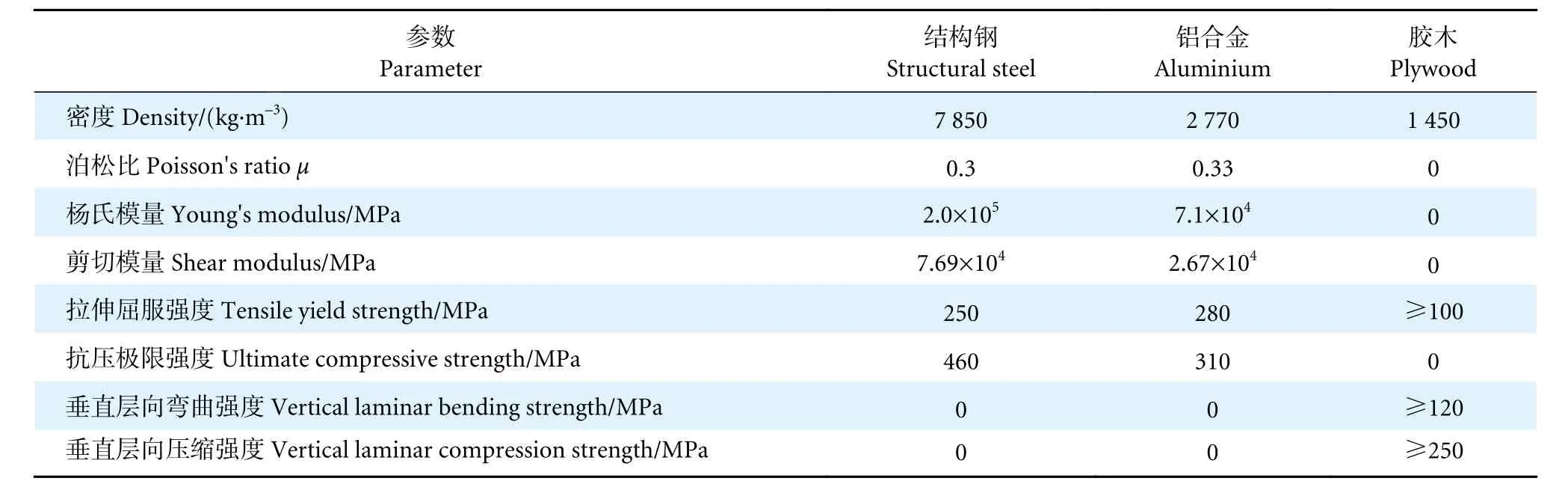
表3 3 種材料參數(shù)Table 3 Parameters of three materials
對(duì)所有固定部件進(jìn)行前處理,網(wǎng)格劃分及外部載荷施加,施加壓力為0.5 MPa,進(jìn)行求解。求解后數(shù)值模擬云圖見(jiàn)圖11。
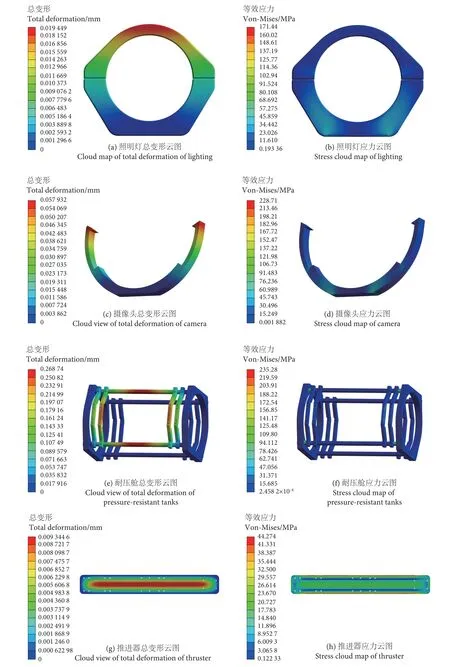
圖11 各個(gè)固定部件數(shù)值模擬云圖Fig. 11 Numerical simulation of each fixed part
由固定部件的仿真結(jié)果可知,圖11-a—11-b照明燈固定部件的最大變形度為0.019 449 mm,變形度較小,可忽略不計(jì),等效應(yīng)力為171.44 MPa,小于結(jié)構(gòu)鋼的屈服強(qiáng)度 (250 MPa),滿足50 m 的壓力要求;圖11-c—11-d 攝像機(jī)的固定部件的最大變形度為0.057 932 mm,變形度較小,等效應(yīng)力為228.71 MPa,小于結(jié)構(gòu)鋼的屈服強(qiáng)度 (250 MPa),滿足50 m 的壓力要求;圖11-e—11-f 耐壓艙的固定部件的最大變形度為0.268 74 mm,變形度較小,等效應(yīng)力為235.28 MPa,小于鋁合金的屈服強(qiáng)度 (280 MPa),滿足50 m的壓力要求;圖11-g—11-h 6 個(gè)螺旋槳固定部件的最大變形度為0.009 344 6,變形度較小,等效應(yīng)力為44.274 MPa,小于膠木的垂直層向彎曲強(qiáng)度和屈服強(qiáng)度(100 MPa),滿足50 m 的壓力要求。綜上所述,ROV 所有的固定部件的強(qiáng)度和設(shè)計(jì)均滿足水下50 m 的要求。
2.5.2 耐壓艙結(jié)構(gòu)設(shè)計(jì)
耐壓艙內(nèi)裝載了ROV 核心部件,包括控制板、電源板、電子羅盤、水下攝像機(jī)、照明器(LED等)、深度傳感器、溫度傳感器和各類連接線等。耐壓艙需具備密封保護(hù)電子元件的作用,基于流線型的外殼將耐壓艙設(shè)計(jì)為圓柱形狀,采用了亞克力材料(PMMA),具體參數(shù)見(jiàn)表4。首先對(duì)整個(gè)耐壓艙艙體強(qiáng)度、安全系數(shù)等進(jìn)行理論計(jì)算[29-30],然后通過(guò)Ansys 軟件的靜應(yīng)力分析判斷艙體應(yīng)力、應(yīng)變及安全系數(shù)是否滿足在水中的強(qiáng)度和剛度要求。
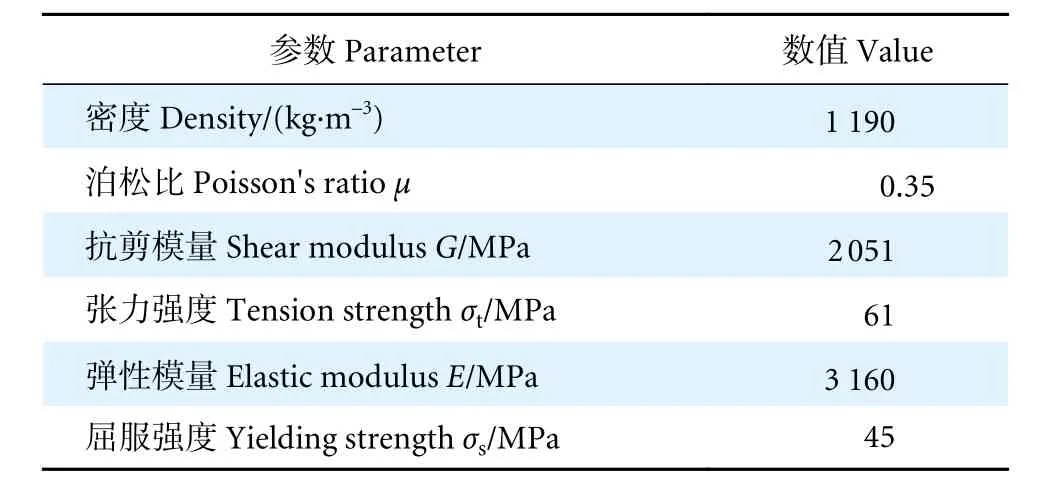
表4 亞克力材料屬性Table 4 Properties of acrylic material
在標(biāo)準(zhǔn)大氣壓下,壓強(qiáng)的計(jì)算公式為:
式中:ρ為海水密度 (kg·m—3);g為重力加速度 (9.8 N·kg—1);h為作業(yè)深度 (m)。
由勞氏規(guī)范安全系數(shù)知,PMMA 材料的安全系數(shù)最小為2.5[31],目前設(shè)計(jì)的耐壓艙的厚度為5 mm,長(zhǎng)度L= 280 mm,直徑D= 100 mm,ROV 潛水深度介于1~50 m,取ξ= 5 mm,計(jì)算臨界壓力PC為:
安全系數(shù)為:
由于n= 3.268 > 2.5,故安全系數(shù)能滿足水下50 m 的設(shè)計(jì)要求。
強(qiáng)度計(jì)算要求判斷耐壓艙所受外力分類,主要有長(zhǎng)圓筒、短圓筒兩種,由公式判斷為:
耐壓艙的長(zhǎng)度L= 270 (mm) <LC=523.224(mm),故判斷為短圓筒。利用米塞斯 (Mises) 公式簡(jiǎn)化后,計(jì)算最小臨界應(yīng)力的公式為:
取安全系數(shù)n=2.5,則:
耐壓艙殼體的壓力σn為6.561 28 MPa,小于PMMA 許用應(yīng)力的值 (22.5 MPa),即耐壓艙殼體能滿足50 m 的強(qiáng)度要求。
在理論計(jì)算的基礎(chǔ)上,利用Ansys 有限元仿真軟件對(duì)耐壓艙殼體進(jìn)行靜應(yīng)力仿真分析,求解后的等效應(yīng)力、合位移、等效應(yīng)變、安全系數(shù)云圖等仿真結(jié)果如圖12 所示。
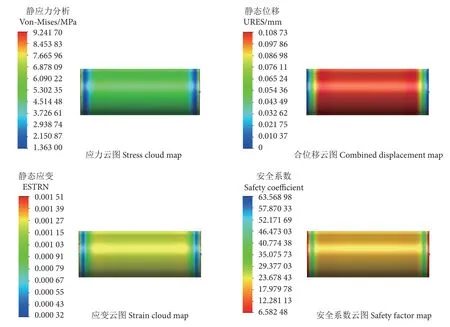
圖12 耐壓艙數(shù)值模擬Fig. 12 Numerical simulation of pressure-resistant chamber
耐壓艙外殼的最大總變形為0.108 73 mm,最大等效彈性應(yīng)為0.001 51,屬于微小變形,可忽略不計(jì);最大等效應(yīng)力為 9.24 MPa ≤σs=45 MPa,滿足PMMA 材料的物理特性,在理論計(jì)算和靜應(yīng)力仿真上均滿足設(shè)計(jì)要求,說(shuō)明耐壓艙艙體可以滿足水深50 m 的設(shè)計(jì)要求。
3 試驗(yàn)測(cè)試
對(duì)ROV 試驗(yàn)測(cè)試包括水下性能測(cè)試和水質(zhì)檢測(cè)試驗(yàn)。在浙江海洋大學(xué)拖曳水池對(duì)ROV 的自由度、穩(wěn)定性、密封性以及上位機(jī)軟件控制性能等進(jìn)行試驗(yàn),驗(yàn)證ROV 設(shè)計(jì)的合理性與科學(xué)性。試驗(yàn)器材包括:試驗(yàn)水池,ROV 整體,傳感器組(DO 傳感器、鹽度傳感器、pH 傳感器),傳感器固定支架,采樣桶,自吸泵,水管及浮力材料等 (圖13)。
3.1 ROV 軟件調(diào)試
上位機(jī)軟件調(diào)試包括ROV 控制系統(tǒng)軟件和多參數(shù)傳感器組數(shù)據(jù)采集軟件。ROV 上位機(jī)軟件采用開(kāi)源的QGround Control (QGC),通過(guò)QGC 調(diào)試ROV 推進(jìn)器推力、各類傳感器作業(yè)參數(shù)、照明和觀測(cè)系統(tǒng)、數(shù)據(jù)傳輸?shù)裙δ埽瑸樗略囼?yàn)提供作業(yè)前提。多參數(shù)傳感器組數(shù)據(jù)采集軟件由pH 傳感器、DO 傳感器、鹽度傳感器組成。調(diào)試方法為將傳感器組調(diào)平后放到水中采集10 min,采集速率為1 s,通過(guò)軟件觀察曲線變化。兩者調(diào)試試驗(yàn)見(jiàn)圖14。
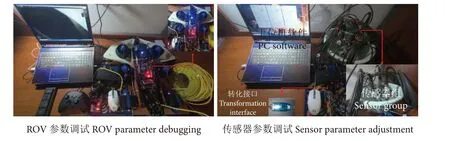
圖14 ROV 控制系統(tǒng)軟件和傳感器數(shù)據(jù)采集軟件調(diào)試Fig. 14 ROV control system software and sensor data acquisition software commissioning
3.2 ROV 性能測(cè)試
通過(guò)X-BOX 控制ROV 到達(dá)指定的深度,采用定深懸停命令在指定的位置懸停,通過(guò)自吸泵吸水輸送到傳感器組,對(duì)水質(zhì)DO、溫度、pH 和鹽度進(jìn)行監(jiān)測(cè);在光線暗淡或水質(zhì)較差的作業(yè)環(huán)境下,可調(diào)節(jié)ROV 的照明系統(tǒng),以滿足水下高清視頻、圖片要求。現(xiàn)場(chǎng)抽水及觀測(cè)試驗(yàn)見(jiàn)圖15。
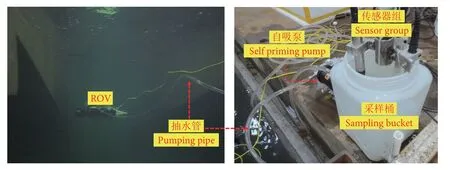
圖15 抽水及觀測(cè)試驗(yàn)Fig. 15 Pumping and observation experiment
3.3 ROV 自由度測(cè)試
ROV 是一個(gè)復(fù)雜的系統(tǒng),其中水下自由度為其重要組成部分。為進(jìn)一步驗(yàn)證ROV 在不同水深下正常作業(yè)的可行性,于水池中進(jìn)行了潛水試驗(yàn)。測(cè)試中,ROV 的目標(biāo)下潛深度設(shè)定為4 m,通過(guò)X-BOX 控制,驗(yàn)證ROV 是否滿足設(shè)計(jì)要求,ROV 自由度測(cè)試見(jiàn)圖16。經(jīng)過(guò)試驗(yàn)驗(yàn)證,ROV 的水下自由度能滿足設(shè)計(jì)要求。
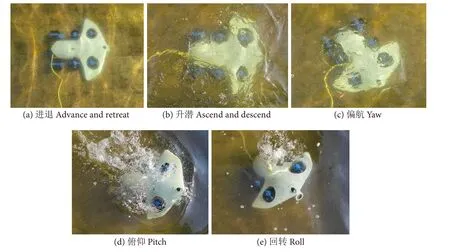
圖16 ROV 自由度測(cè)試Fig. 16 Freedom test of ROV degrees
3.4 水質(zhì)檢測(cè)測(cè)試
在本次測(cè)試中,ROV 測(cè)試的下潛深度為0~4 m,并在池中保持定深狀態(tài),通過(guò)自吸泵吸入采樣桶中,30 min 內(nèi)定點(diǎn)采集水池的水樣,經(jīng)傳感器組檢測(cè),通過(guò)上位機(jī)軟件實(shí)時(shí)監(jiān)測(cè)水溫、pH、DO 和鹽度4 個(gè)水質(zhì)指標(biāo)隨時(shí)間的變化情況。ROV在指定1 m 位置懸停的4 個(gè)參數(shù)變化見(jiàn)圖17,在1、2、3 m 的變化見(jiàn)圖18。

圖17 ROV 在水深1 m 的溫度、溶解氧、pH 和鹽度變化Fig. 17 Changes of temperature, DO, pH and salinity of ROV at water depth of 1 m
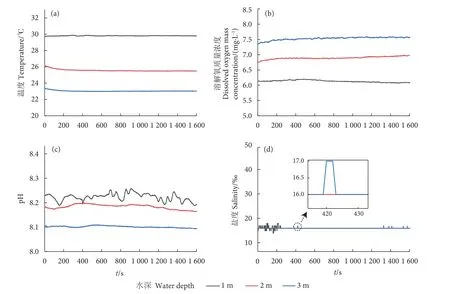
圖18 ROV 在不同水深的溫度、溶解氧、pH 和鹽度變化Fig. 18 Changes of temperature, DO, pH and salinity of ROV at different water depths
4 小結(jié)
目前國(guó)內(nèi)外針對(duì)水質(zhì)檢測(cè)的ROV 設(shè)計(jì)與研究報(bào)道較少,水產(chǎn)養(yǎng)殖中的水質(zhì)檢測(cè)仍存在監(jiān)測(cè)片面性、局部性、作業(yè)區(qū)域受限以及監(jiān)測(cè)周期長(zhǎng)等問(wèn)題,尚未得到有效解決。基于國(guó)內(nèi)外的研究現(xiàn)狀,本研究設(shè)計(jì)了一種小型作業(yè)型ROV,用于監(jiān)測(cè)水產(chǎn)養(yǎng)殖中的水質(zhì)。樣機(jī)的性能測(cè)試和水質(zhì)參數(shù)測(cè)試結(jié)果顯示,ROV 的性能可滿足工作要求;在水質(zhì)參數(shù)測(cè)試中,ROV 可以達(dá)到指定位置進(jìn)行分層和定點(diǎn)水質(zhì)采樣。此外,還可以更換不同傳感器,如氨氮傳感器、氧化還原電位傳感器(ORP)、濁度傳感器等進(jìn)行抽水測(cè)試,以滿足不同的水質(zhì)檢測(cè)需要。
猜你喜歡
環(huán)境(2023年5期)2023-06-30 01:20:01
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
當(dāng)代水產(chǎn)(2019年1期)2019-05-16 02:42:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
河南科技(2014年23期)2014-02-27 14:19:07
