煤巖識別技術發展綜述
2024-01-12 11:16:34賀艷軍李海雄胡淼龍薛競飛
工礦自動化 2023年12期
賀艷軍, 李海雄, 胡淼龍, 薛競飛
(1. 國能包頭能源有限責任公司,內蒙古 包頭 014070;2. 榆林市能源局,陜西 榆林 719000;3. 浙江維思無線網絡技術公司,浙江 嘉興 314001;4. 西安科技大學 電氣與控制工程學院,陜西 西安 710054)
0 引言
煤巖識別技術是采煤機滾筒自動調高的技術基礎,也是綜合機械化采煤無人工作面的核心技術之一。目前,國內采煤機滾筒的調節大多依賴人工調節及采煤機記憶截割。人工調節通過人的聽覺和視覺判斷采煤機滾筒是否截割到巖石,該方法易受環境及人為因素影響。記憶截割根據記憶信息自動調節采煤機滾筒高度,但也需要人為干預。采煤機在截割煤層過程中,若欠截割會造成采煤不全、資源浪費;若過截割,會使煤炭質量下降,損害截齒、產生火花,可能引發瓦斯爆炸。因此,為采煤機自動調高提供依據的煤巖識別技術[1],是提高采出率、降低煤矸石含量和截割巖石對采煤機損害的重要保證。
現有煤巖識別技術包括圖像識別、過程信號監測識別、電磁波識別、超聲波探測識別、多傳感器融合識別等。圖像識別技術通過攝像頭或激光掃描儀等獲取圖像信息,利用圖像處理算法進行特征提取和分類,最終判斷煤層和巖石的界面位置。過程信號監測識別技術基于采煤機滾筒運行中信號變化進行識別,通過監測采煤機滾筒的轉速、電流、振動等參數,可判斷采煤機滾筒是否截割到巖石。電磁波識別技術利用電磁波在煤巖介質中傳播的特性進行界面識別,通過分析發送的電磁波信號和接收的反射信號判斷煤巖界面的位置和形態變化。超聲波探測識別技術利用超聲波在煤巖介質中傳播的特性進行界面識別,通過分析發送的超聲波信號和接收的反射信號判斷煤巖界面的位置和形態。多傳感器融合識別技術通過多個傳感器,如振動加速度傳感器、銷軸傳感器、轉矩傳感器、電流傳感器等,獲取更全面和準確的煤巖界面信息,并將多傳感器信息進行融合以獲得識別結果。
煤巖識別技術種類多樣,但用于實際開采卻很少,主要原因:① 煤礦井下環境復雜,如存在高密度粉塵、大功率設備產生的電磁場、光照強度的變化、各種設備產生的強振動和噪聲等。② 地質條件復雜多變,如斷層、裂隙、褶皺及巖漿侵入都會導致煤層的厚度、硬度發生改變。這些均對煤巖特征的識別帶來了挑戰。本文對現有煤巖界面識別技術進行分類,通過闡述其識別原理,分析每種技術存在的局限性及應用情況,指出技術發展趨勢,為未來研究提供參考。
1 圖像識別技術
目前,圖像識別技術包括傳統圖像處理識別技術和基于深度學習的圖像處理識別技術。
1.1 傳統圖像處理技術
傳統圖像處理技術主要包括圖像變換、圖像分割、圖像特征提取等。
1) 圖像變換包括幾何變換、尺度變換及空間域與頻域間變換。張婷[2]提出了基于變換域與高斯混合模型聚類的煤巖識別方法,采用二維離散余弦變換(2D Discrete Cosine Transform,2D-DCT)對圖像進行特征壓縮,以保留主要的圖像信息;采用二維離散小波變換(2D Discrete Wavelet Transform, 2D-DWT)來提取圖像的紋理特征,通過應用高斯混合模型聚類,獲取識別結果,識別準確率為90.83%。
2) 圖像分割算法包括閾值分割、邊界分割和區域分割。其中,灰度閾值法是常用的閾值分割算法,通過計算煤巖圖像灰度特征并設定閾值,根據像素點灰度值與閾值的比較結果進行煤巖分類。灰度閾值法適用于采煤工況簡單的環境,但最大困難在于合適閾值的選取。高斯混合聚類是基于概率分布的聚類算法,通過調整單高斯模型數量和權值,可更好地適應不同類別的數據分布,提高分類準確性。黃韶杰等[3]采用灰度閾值算法和高斯混合模型(Gaussian Mixture Model, GMM)聚類分析煤巖圖像。在灰度閾值算法中,光照變化會造成圖像中煤、巖的灰度值發生變化,導致設定閾值無法準確識別煤巖。GMM 無需手動選擇閾值,通過數據本身建模和分析更好地適應灰度分布變化。因此,高斯混合聚類方法在光照變化較大的情況下具有更好的魯棒性和準確性。吳德忠等[4]首先對煤巖圖像進行二值化處理,然后采用邊界跟蹤算法對二值圖像進行處理,最后采用最大似然法、K 均值聚類算法、支持向量機、神經網絡4 種算法對邊界分類并提取,結果表明:神經網絡識別準確率最高,達99.919 9%,支持向量機識別準確率為99.913%,K 均值聚類算法識別準確率為98.365%,最大似然法識別準確率為91.562%,Liu Chunsheng 等[5]首先采用Tikhonov 正則化方法重構煤巖紅外圖像,以降低噪聲干擾,然后對重構圖像進行灰度變換,最后考慮分數階微分的頻率特性和長記憶特性,構建新的分數階微分圖像邊緣檢測模式,實現了煤巖斷裂邊緣特征識別。
3) 圖像特征包括顏色特征、形狀特征、幾何特征及紋理特征等。伍云霞等[6]采用字典學習算法提取圖像紋理特征,結果表明字典學習方法有很好的稀疏性,對煤巖有很好的區分性,但冗余信息多,需結合其他算法使用。對此,伍云霞等[7]采用距離度量法對煤巖紋理特征進行區分,將特征向量映射到新的特征空間,增大不同類型特征距離,減小相同類型特征距離,結果表明該方法煤巖圖像識別結果較使用歐氏距離方法方法提高了4.17%,達到95%。黃蕾等[8]提出了煤巖紋理特征提取算法,對局部二值模式(Local Binary Pattern,LBP)進行改進,通過逐像素點計算方式生成局部方差圖,并利用變差函數計算不同方向的變差函數向量,最后組合變差函數向量作為紋理特征,改進的LBP 算法識別準確率較LBP 算法提高了3.21%,達到86.02%。王超等[9]使用LBP 來判斷紋理差異,結合水平、垂直、45°、135°4 個方向的灰度共生矩陣提取能量、熵值、對比度和逆差分矩等特征參數,結果表明通過灰度共生矩陣提取的能量和熵特征參數可有效用于煤巖識別。
1.2 基于深度學習的圖像處理技術
深度學習方法提取圖像深層及淺層特征,被廣泛用于識別煤巖圖像。Si Lei 等[10]提出了一種卷積神經網絡識別煤巖界面的方法,針對訓練樣本少造成過擬合的問題,采用dropout、L2 正則化和batch 歸一化3 種正則化方法構建煤巖圖像數據集,并通過添加噪聲、圖像縮放和圖像旋轉等方法增強煤巖圖像數據集,實驗結果表明所設計的網絡具有較好的煤巖圖像識別性能。高峰等[11]提出了一種新的煤巖圖像分割算法模型(Coal-Rock Pyramid Network,CRPN),通過采集煤巖完整類、裂隙陰影類和暗光類3 類圖像進行訓練,與U-net,Segnet 圖像分割算法進行比較,CRPN 的識別準確率較U-net 算法和Segnet算法分別提高了2.46%和7.64%,達到91.54%。孫傳猛等[12]使用深度可分離卷積改進YOLOv3 算法,針對煤巖界面不可數、連續的特點,將預測框在x 和y 方向的總投影長度占煤巖界面曲線投影總長度的比值作為目標檢測準確性評價標準,結果表明:改進的YOLOv3 模型在x 方向上的識別準確率較原模型提高了5.85%,為89.89%;在y 方向上的識別準確率較原模型提高了16.99%,為73.30%。
1.3 圖像識別技術應用現狀
目前,煤巖圖像識別技術還處于不斷研究和實驗階段。傳統圖像處理技術依賴于人工設計,每種方法只可針對性地解決某一問題。但實際應用中,不同采煤工作面的煤巖類別和特性不盡相同,這導致傳統圖像處理技術在煤巖識別過程中的魯棒能力及泛化能力差。
基于深度學習的圖像處理技術依靠數據驅動來提取特征。在大量數據樣本的支持下,深度學習可提取更加抽象和深層的煤巖圖像特征。這使得深度學習在應對井下復雜環境時具有強大的抗噪能力、魯棒性,且能夠很好地泛化到新的情況下。但基于深度學習算法通常需大量的標注數據來進行訓練,以獲得良好的性能。然而,在煤礦環境中,獲取大規模、高質量的煤巖界面圖像數據并進行準確的標注具有一定困難,且不同類別的煤巖界面樣本可能存在不平衡的情況,某些類別的樣本數量較少。這些都可能導致煤巖識別的性能下降。
2 過程信號監測識別技術
過程信號監測通過采煤機的振動、切割應力、切割溫度等來判斷切割煤巖的狀態。不同過程信號特點見表1。
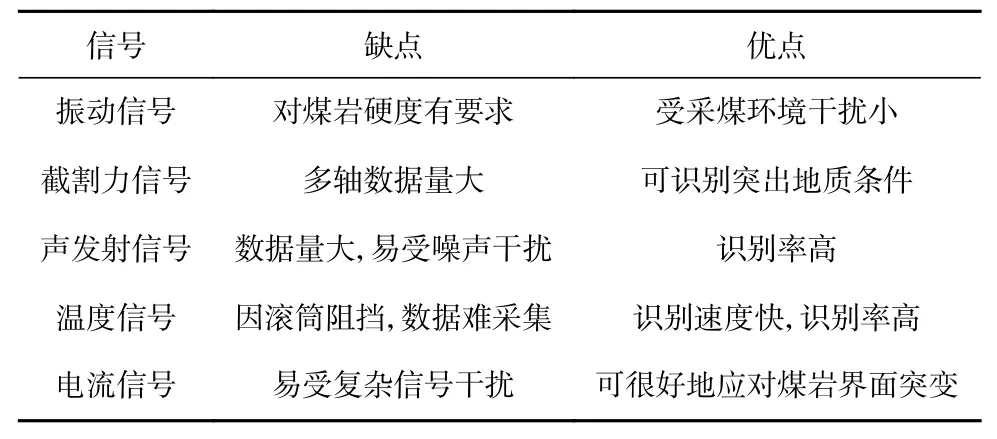
表1 過程信號監測識別技術特點匯總Table 1 Summary of technical features of process signal monitoring and recognition
2.1 振動信號
振動監測技術通過采集采煤機截齒、搖臂、轉軸及機身的振動信號來判斷是否截割到煤巖界面。煤巖硬度一般可由堅固性系數(表2)進行區別,截割時會因煤巖硬度不同而產生不同的振動信號。任潔等[13]通過測量切割介質中不同測點的振動信號,構建了采煤機切割狀態下的實時檢測系統,以特征值作為煤巖分界的臨界值,當超過臨界值時即報警。Si Lei 等[14]基于采集的采煤機切割狀態下的5 種振動加速度信號,提出了改進的自適應果蠅優化算法(Improved Fruit-fly Optimization Algorithm,IFOA)來優化最小二乘支持向量機(Least Squares Support Vector Machine, LSSVM)參數,通過對振動信號進行特征提取和優化參數訓練,準確地判斷采煤機的切割狀態。張強等[15]通過分析采煤機截齒x,y,z軸的振動信號和紅外熱信號,發現隨著巖石比例的增加,振動加速度和溫度都有所增加。針對振動信號提取易受干擾的問題,張啟志等[16]通過分析在不同切割狀態下的振動信號與空載振動信號的倒譜均值判斷切割狀態,結果證明:此方法在煤巖硬度差大于10 MPa 時,識別準確率為75%。另外,一些學者根據鉆式采煤機采煤過程的振動特性來識別煤巖界面[17]。
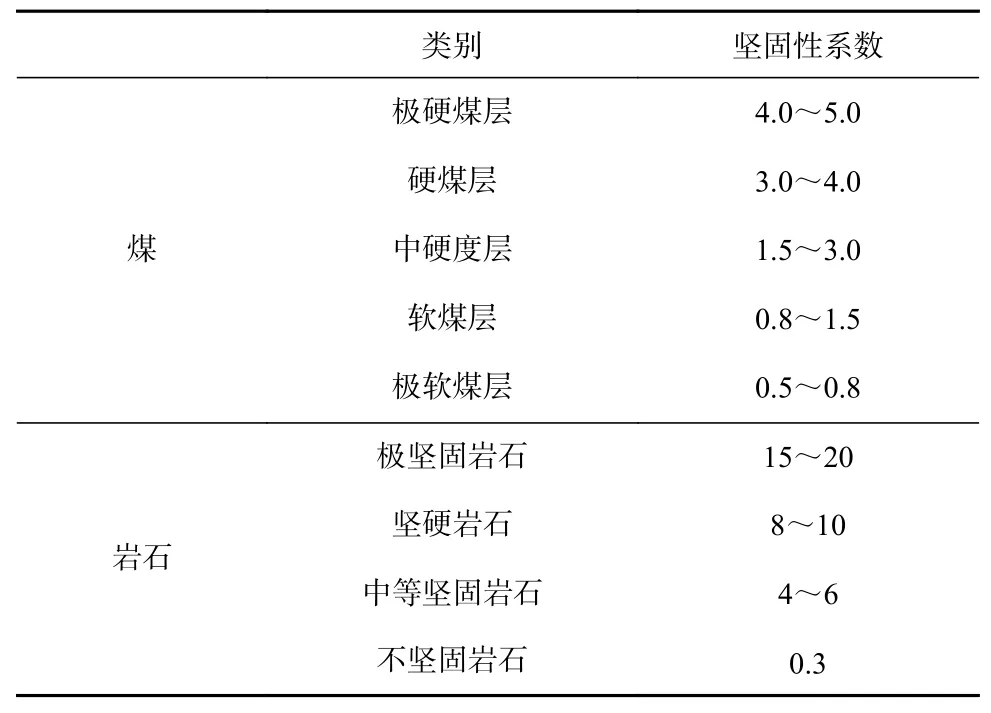
表2 煤巖堅固性系數Table 2 Coal and rock firmness coefficient
2.2 截割力信號
由于煤巖力學性質的差異,截煤機截齒切割煤巖時的動態性能特征可用于識別煤巖界面。田立勇等[18]通過灰色預測理論提高了采煤機在切割煤層時的自適應追蹤能力,實驗結果證明在切割巖層時比切割煤層時平均受力大19.45%。程誠等[19]提取了采煤機切割煤巖過程時的轉矩信號,采用基于小波包奇異值(Wavelet Packet Singular Value,WPSV)和BP神經網絡的煤巖識別技術進行煤巖識別,結果證明:改進的BP 神經網絡識別準確率更高。田立勇等[20]采用加權融合算法對采煤機搖臂和連接架的4 個銷軸傳感器信息進行處理,結果證明:加權融合前截齒割巖時應變曲線幅值在707×10-6~798×10-6,截齒割煤時應變曲線幅值在679×10-6~773×10-6,割煤和割巖時的應變曲線幅值區間存在重合,而加權融合后截齒割巖時應變曲線幅值在756×10-6~777×10-6,截齒割煤時應變曲線幅值在717×10-6~743×10-6,根據應變曲線規律,標定合適的期望值來判斷采煤機在切割過程中是割煤還是割巖。
2.3 聲發射信號
聲發射信號監測法通過采集采煤機滾筒切割煤巖過程中產生的聲音來判別煤巖界面。Xu Jing 等[21]通過改進集成經驗模態分解(Improved Ensemble Empirical Mode Decomposition,IEEMD)對采煤機切割聲音信號進行特征提取,較傳統EEMD 算法的煤巖識別準確率提高了6.67%,達到92.67%。張強等[22]采用快速傅里葉變換得出采煤機的切割聲集中在100~200 kHz,并基于優化的隸屬度函數構建了煤巖動態識別系統。Xu Jing 等[23]通過希爾伯特-黃變換(Hilbert-Huang Transform,HHT)將切割煤巖聲音分解為若干固有模式函數(Intrinsic Mode Function,IMF),獲得1 024 個Hilbert 邊緣譜點,使用具有3 個卷積層和2 個子采樣層的LeNet-5 卷積神經網絡作為切削模式識別器,識別準確率達到了98.55%。Xu Jing 等[24]采用群體智能算法優化了可變平移小波神經網絡(Translation Variance Wavelet Neural Network,TVWNN)的關鍵參數,使用改進的蝙蝠算法(Bat Algorithm, BA)優化TVWNN 作為切削模式識別器,仿真結果表明煤巖識別準確率為95.25%。
2.4 溫度信號
煤巖物理特性不同,導致采煤機截齒在切割過程中所產生的溫度不同,因此利用紅外測溫儀對煤巖附近溫度進行測量可對煤巖進行識別。董玉芬等[25]研究了煤和巖石的紅外輻射溫度場隨應力改變的變化規律及某些前兆信息特征,為溫度探測法提供了基礎。張強等[26-27]通過調節牽引速度和滾筒轉速,測試7 種不同比例的煤巖在截齒切割下的紅外熱像特性和閃溫特性,得出閃溫峰值在切巖時比切煤時要高,且與牽引速度和滾筒轉速呈正比的結論。張強等[28]在單光源 9 kLux 的激勵強度下,通過紅外分析軟件得出,在溫度場中,煤和巖石具有不同的熱傳導性和熱容量,因此它們會對溫度變化做出不同的響應。
用紅外成像進行煤巖識別時,采煤機滾筒、截齒都會嚴重阻礙信號的采集。主動溫度激勵的煤巖識別技術需長時間的溫度激勵才能達到識別效果,不便于實際情況下開采,且長時間溫度激勵在高瓦斯的井下會產生安全隱患。
2.5 電流信號
采煤機截割時會因截割對象的不同(各種質地的煤及各種巖)引起阻力矩發生變化,從而導致電動機的定子電流發生變化。電流信號識別法通過提取電流的幅值、頻率、相位差等特征判斷截割狀態,達到煤巖識別的目的。曹慶春等[29]利用HHT 提取信號的幅度和相位信息,應用主成分分析對信號進行降維處理,并利用多分類相關向量機進行分類,結果證明該方法煤巖識別準確率可達95%。王元軍等[30]采用卡爾曼濾波算法(Kalman Filtering,KF)對截割電流特征進行去噪處理,采用隨機森林(Random Forest,RF)對處理后的特征進行分類以識別煤巖,結果證明經過KF 處理后準確率由56.67%提高到了96.72%。
2.6 過程信號監測識別技術應用現狀
過程信號監測識別技術在實際應用中面臨一些挑戰和限制,由于振動、截割力、聲發射、溫度、電流等都是直接與截割相關的信號,我們將其實際應用受限的原因進行分析。
1) 信號復雜性。煤巖界面特征和分布可能因地質條件和采礦歷史等因素而變化,導致采煤機截割過程中產生不同變化,信號的特征也會隨之發生變化;同時,過程信號監測識別技術與采煤機的工作狀態、截齒磨損程度等直接相關。目前的研究只考慮采煤機工作狀態、截齒磨碎程度等理想情況,未來需進行算法優化和參數調整。
2) 干擾多樣性。井下存在多種干擾信號,如機械振動、噪聲和其他設備的干擾等,可能會掩蓋振動、截割力、聲發射、溫度、電流等信號中的特征,導致識別煤巖界面的準確性下降。
3 電磁波識別技術
電磁波識別技術對煤巖介電常數、靜電導率、化學元素等有一定要求,電磁波信號特點見表3。

表3 電磁波識別技術特點匯總Table 3 Summary of technical features of electromagnetic wave recognition
3.1 雷達信號
探地雷達(Ground Penetrating Radar,GPR)的主要優勢在于它的非侵入性和非破壞性,可提供地下特征的瞬時成像。煤巖界面識別主要依靠煤巖介質的電磁性質差異實現,常見的煤巖電磁參數包括相對介電常數(圖1)、電導率(圖2)等。李亮等[31]采用LTD-2100 型探地雷達實地探測,分析了雷達波在分層介質模型中的散射規律,結果表明測量數值和理論數值一致,為煤巖識別提供了理論基礎。劉萬里等[32]提出基于帶通濾波的煤巖界面識別技術、煤層介電常數精確校正技術、基于時間同步的探測數據定位技術,實現了兩巷特厚煤層的動態測量。苗曙光等[33]提出基于最大類間方差法的圖像閾值化分割方法,該方法不僅可去除偽邊界,還可測量煤層厚度。

圖1 常見煤巖介質相對介電常數Fig. 1 Relative dielectric constant of common coal rock media

圖2 常見煤巖介質電導率Fig. 2 Electrical conductivity of common coal rock media
3.2 γ 射線信號
自然γ 射線可從巖石和煤層中輻射出來,而巖層中的γ 射線輻射強度遠大于煤層。可將巖層視作放射源,通過檢測γ 射線穿透煤層的輻射量,確定殘留煤層厚度。王增才等[34]根據自然γ 射線輻射狀況,推導了自然γ 射線穿透煤層及液壓支架鋼板的衰減規律公式,得到自然γ 射線0~255 mm 煤層衰減曲線。Yang Zengfu 等[35]等基于自然γ 射線穿透煤層衰減與煤層厚度之間的關系,建立了相應的數學模型。
3.3 紅外光譜信號
在相同測量條件下,煤巖反射光譜的差異主要取決于物質成分。紅外光譜可顯示煤巖中不同的物質成分,從而識別煤巖。紅外光譜(太赫茲光譜、高光譜)識別主要包含樣本準備、模型訓練和模型測試等環節(圖3)。Wu Fangwei 等[36]采用優化的模糊C-均值聚類算法對近紅外光譜進行分類,并將分類結果與X 射線衍射分析結果進行比較,驗證了算法的有效性。Yang En 等[37]采用主成分分析和高斯徑向基核主成分分析提取光譜特征,采用支持向量機對特征分類,結果表明該方法對煤巖粉體和煤巖自然塊的識別準確率分別達到94% 和92%。向陽等[38]采用無煙煤與抑爆劑9∶1 混合的混合物模擬煤礦井下粉塵環境,采用光譜角度匹配(Spectral Angle Mapping,SAM)和皮爾遜相關系數方法來識別,結果表明,SAM 方法準確率為100%,遠高于皮爾遜相關系數的87.5%。王賽亞等[39]研究了煤與巖石近紅外光譜曲線特征和吸收機理,在實驗室利用近紅外光譜儀分別獲取27 種煤與巖石試樣在長波近紅外波段(1 100~2 500 nm) 的反射光譜曲線,結果表明煤層夾矸和頂板巖層光譜曲線斜率存在區別,可用于煤巖及夾矸層的識別。

圖3 紅外光譜識別流程Fig. 3 Infrared spectrum recognition process
3.4 太赫茲光譜信號
太赫茲波是波長范圍為0.03~3.00 mm,介于微波與紅外間的一種電磁波。當電磁波頻率達到太赫茲波段時,對回波研究可得到介質物理特性。Wang Xin 等[40]采用太赫茲時域光譜對我國常見的10 種煤巖進行測量,通過主成分分析、支持向量機和太赫茲光譜數據對煤巖樣本進行分析,對煤巖的識別率達到100%。Yu Jing 等[41]將無煙煤與石英砂巖按39 種不同比例均勻混合,通過太赫茲系統獲得煤巖樣品光譜,利用BP 神經網絡和支持向量機對光譜進行分類,實驗結果表明,BP 神經網絡和支持向量機對煤巖識別的準確率分別達92.8%和95.7%。
3.5 高光譜信號
高光譜是將成像技術和光譜技術相結合的多維信息獲取技術[42],通過對煤巖光譜的定量分析,可快速獲得煤巖的成分和結構信息,以便進行煤巖識別。Shao Hui 等[43]將聲光可調諧濾波器作為光譜儀,采集4 種煤巖樣品的光譜,用樸素貝葉斯、邏輯回歸和支持向量機3 種多標簽分類器進行分類,并利用高斯擬合方法提高分類精度。3 種方法的煤巖識別準確率分別達54.11%,83.36%,100%。張旭輝等[44]采用競爭性自適應重加權算法提取光譜特征信息,用灰度共生矩陣提取圖像特征紋理信息,將提取的光譜特征信息與紋理信息進行主成分分析降維融合,結果表明,經過主成分分析融合后,高光譜特征信息的性能要優于單獨使用圖像特征信息或光譜特征信息的性能。韋任等[45]提出了基于煤巖Al 元素組分的特征提取方法,通過連續統去除法、一階微分法、二階微分法和光譜相關角-光譜信息散度模型法,在特定的波段范圍內對煤巖進行區分,結果表明,二階微分法可更準確地區分不同的煤巖樣本。
3.6 電磁波識別技術應用現狀
目前,使用雷達信號識別煤巖界面是實際使用最多的技術。浩特智能科技有限公司開發了礦井綜采工作面煤巖界面識別系統,該系統使用了P 波定向能聚焦相陣控地質雷達天線,通過雷達信號識別煤巖,探測深度達1.5 m,煤巖層位識別誤差小于7%。中煤集團能源研究院重點項目《面向煤炭智能化開采的煤巖界面識別雷達系統研發與應用示范》構建了煤巖界面識別雷達系統,提出了適用于采煤工作面的三維空間高精度定位和煤巖識別算法,完成了雷達系統煤巖識別軟件開發。
在中國的煤礦開采中,使用γ 射線進行煤巖識別的應用相對較少。因為γ 射線設備的成本較高,操作和維護需要專業的技術和嚴格的輻射安全措施。由于γ 射線需要放射源,若工作面頂板所含放射性元素含量低或不含放射性元素,將不適用自然γ 射線法。所以在我國只有1/5 的煤礦采用自然γ 射線法來識別煤巖。
高光譜成像需使用特殊的傳感器和設備,這些設備的成本較高,對于一些煤礦企業來說可能不太實際。此外,煤礦工作環境復雜,光照條件和煤巖表面的反射特性可能會對高光譜成像效果產生一定的影響。
太赫茲光譜技術仍處于發展階段,設備和技術的成本較高,且數據處理和分析的復雜性限制了其在實際應用中的推廣。隨著太赫茲光譜技術和高光譜成像技術的進一步發展和成本的降低,它們有望在煤礦行業中得到更廣泛的應用。
4 超聲波探測識別技術
4.1 超聲波信號
根據多相介質間聲阻抗的差異,超聲波可在不同介質的界面上產生聲波的傳輸和反射,換能器可接收到煤巖界面的反射回波信號,通過計算煤巖界面的聲阻抗之比可探測煤巖界面。Liu Guanhua 等[46]研究了煤中超聲的速度和衰減系數,發現時域和頻域的聲發射特性受到煤質量和超聲基頻的影響,為超聲波探測提供理論基礎。Wei Wei 等[47]首先利用改進的經驗變分模態分解對煤巖界面接收回波進行預處理;然后,采用非對稱高斯模型擬合部分失真回波包絡;最后,利用峰值聚焦成像技術對處理后的包絡進行成像。李力等[48]使用超聲波透射法獲得了不同頻率下煤巖超聲波衰減系數,并建立超聲波相控陣以提高回波信號信噪比。
4.2 超聲波探測識別技術應用現狀
目前,超聲波探測識別技術因煤結構不同,探測的厚度也不同,對于衰減大、聲波低的煤識別厚度非常淺,基本上無法探測煤層厚度。另外,通過換能器發射和接收信號,難免會產生信號疊加,導致煤層厚度讀取不準確。故與其他技術相結合來應對復雜的地質情況。神東煤炭集團公司采用定向鉆孔勘探工作面的頂底板煤巖分界線技術,該技術采用地震信號和超聲波信號確定煤巖分界線的位置,實測精度達到了0.3 m。
5 多傳感器融合識別技術
5.1 多傳感器融合
煤礦井下環境復雜,單傳感器易受到井下復雜環境干擾;多傳感器融合識別技術通過收集井下不同的數據,如采煤機電流、振動、聲音、扭矩等,并充分利用多種信息源,根據特定的標準把冗余或互補的信息融合起來獲得煤巖界面。在信息融合中,不同的數據源特征和融合目標可根據需求選擇不同的融合算法。此外,信息融合可在不同的層次進行,包括數據層融合、特征層融合和決策層融合(圖4)。在數據層融合中,可將不同信號源的原始數據進行整合和組合,形成更全面和綜合的數據集。例如,將振動信號、截割力信號、聲發射信號、溫度信號和電流信號進行數據平均、加權或插值等處理,得到綜合的數據特征。在特征層融合中,可提取和組合不同信號源的特征,形成更具信息量和表達能力的特征表示。例如,對振動信號、截割力信號、聲發射信號、溫度信號和電流信號進行特征提取,然后通過特征拼接、特征加權或特征變換等方法得到綜合的特征表示。在決策層融合中,可將來自不同信號源或特征的決策結果進行整合和匯總,形成最終的綜合決策。例如,對振動信號、截割力信號、聲發射信號、溫度信號和電流信號的識別結果進行投票法、加權法或模型集成等處理,得到最終的煤巖界面識別結果。

圖4 多傳感器融合模型Fig. 4 Multi-sensor fusion model
目前,多傳感器識別方面所采用的融合算法主要是模糊神經網絡和D-S 證據理論。模糊系統和神經網絡存在一定差異: 神經網絡不善于處理模糊信息,但具有分布式并行信息處理及自學習的能力;模糊系統不具備分布式并行信息處理的能力,處理信息速度慢、精度低,但相較于神經網絡,模糊系統善于處理模糊信息。模糊神經網絡是神經網絡與模糊系統的結合,在處理大規模的模糊應用問題方面效果優良。張強等[49]采集采煤機切割不同煤巖比例時的振動信號、電流信號、聲信號,使用最小模糊熵原理對其隸屬度函數規則進行模糊化處理,建立基于自適應模糊神經系統的煤巖識別模型,實驗證明該模型可實時動態識別煤巖界面。
D-S 證據理論不需要知道先驗概率,能夠很好地表示“不確定”性,也廣泛應用于煤巖識別領域。Si Lei 等[50]以聲信號、Y軸和Z軸振動信號為分析對象,提出了一種基于改進徑向基函數神經網絡和D-S 證據理論的采煤機煤巖切削狀態融合識別方法,融合模型的識別精度可達98%,顯著高于單一類型信號特征的識別精度。Liu Yanbing 等[51]利用多種傳感器采集采煤機的響應信號,基于小波包分解和模糊神經網絡的識別系統,實現了煤巖界面識別方法的多信號特征提取和數據融合,提高了識別率。王海艦等[52]在考慮采煤機新齒、輕微磨損、一般磨損及嚴重磨損 4 種狀態下,對不同煤巖比例的煤巖進行分析,用粒子群算法和最小模糊熵得到最優隸屬度函數,構建D-S 證據理論實現煤巖識別,實驗結果表明采煤機的不同截齒狀態對特征樣本值的差異性非常明顯。
5.2 多傳感器融合識別技術應用現狀
采煤機截割過程中的多傳感器煤巖識別技術還在測試階段,目前應用相對較少,存在以下原因:
1) 多傳感器融合識別技術涉及多個傳感器的部署、數據采集、數據處理和融合等方面。這需要投入大量的資源和成本,包括傳感器設備、數據存儲和處理設備、算法開發和維護等。
2) 實際應用中,煤礦環境可能存在復雜的地質條件、噪聲干擾、溫度變化等因素,這可能對傳感器的性能和數據質量產生影響。這些環境因素可能會導致傳感器數據的不準確性或干擾,從而影響多傳感器融合識別的準確性和可靠性。
6 煤巖識別技術發展方向
1) 從煤巖識別算法的性能來看,現有算法的識別精度已經足夠,但識別速度尚有不足;同時,特定條件下沒有考慮復雜環境干擾,目前距離井下實際開采的需求還有一定差距。未來研究中,在滿足特征提取有效性的前提下,大幅度提高算法的實時性,并針對粉塵、水霧、光照的因素開展算法抗干擾方面的研究。
2) 從井下復雜環境下煤巖識別技術的硬件實現方面來看,需加強各種復雜信號干擾下的礦用傳感器研究,以確保能夠滿足智能化礦山檢測層傳感器防潮、防濕、防粉塵等要求;同時,采用更先進的雙目視覺相機、深度相機等智能設備,與各種礦用傳感器結合使用,以達到提高識別精度和效率的目的。
3) 從多種煤巖識別技術交叉融合使用的角度看,目前尚未有完全滿足煤巖普適性要求的技術。因此,針對煤巖硬度相差大的情況,建議采用過程信號監測識別及多傳感器相融合的識別技術;針對硬度接近情況,可考慮將圖像識別及電磁波識別技術相融合,通過圖像識別技術判別煤巖界面,通過雷達探測識別及超聲探測識別技術探測煤層厚度。
7 結語
從圖像識別、過程信號監測識別、電磁波識別、超聲波探測識別、多傳感器融合識別的技術原理及應用現狀方面介紹了各種煤巖識別技術。提出了各種煤巖識別技術需進一步解決的問題,包括煤巖圖像數據的采集和標注、復雜信號干擾、識別的準確性及多傳感器數據匹配問題。對未來煤巖識別技術的發展方向提出建議,旨在提高算法的實時性和抗干擾能力,加強礦用傳感器的研究及多種煤巖識別技術的交叉融合使用。
猜你喜歡
防爆電機(2022年1期)2022-02-16 01:14:06
當代陜西(2020年13期)2020-08-24 08:22:02
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
制造技術與機床(2017年5期)2018-01-19 02:49:17
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
濰坊學院學報(2016年2期)2016-12-01 13:00:11
新聞傳播(2015年11期)2015-07-18 11:15:04
河南科技(2014年23期)2014-02-27 14:19:15
河南科技(2014年18期)2014-02-27 14:14:58