基于虛擬現實技術的船用陀螺羅經實驗教學模式研究
2023-12-02 14:54:44廉靜靜
船舶職業教育 2023年6期
廉靜靜,楊 曉
大連海事大學,遼寧大連 116026
虛擬現實技術最早于20 世紀80 年代提出,又稱為人工環境或靈境技術。虛擬現實技術通常由兩部分組成:一部分為創建的虛擬世界(環境),另一個部分為介入者(人),虛擬現實的核心是強調兩者之間的交互操作,即反映出人在虛擬世界(環境) 的體驗[1]。早期虛擬現實技術大多集中在軍事仿真系統和航空航天應用上,但由于虛擬現實系統成本太高,無法推廣普及。自20 世紀90 年代中期以后,隨著技術進步以及相關軟硬件產品性能提高和價格下降,虛擬現實技術得到了飛速發展,其應用領域出現了全新局面,開始在科學計算可視化、建筑設計漫游、教育培訓和娛樂等方面獲得富有成效的應用。
近年來,我國教育部批準了多個國家級虛擬仿真實驗教學中心;2018 年教育部又公布了首批國家虛擬仿真實驗教學項目[2];2022 年教育部辦公廳公布了首批虛擬教研室建設試點名單[3],一系列政策的實施,其目的是加強虛擬仿真優質實驗教學資源的建設,重視實驗教學信息化,持續提高實踐教學質量,促進高等教育內涵式發展,注重人才培養,提升教育教學能力,使其充分運用信息技術,將現代信息技術與教育教學深度融合,探索突破時空限制、形式多樣的教學模式,從而提升學生學習積極性、主動性和探索發現以及解決科學問題的能力。
我國海事院校航海類專業的實驗實訓是受國際公約規范的必需環節,由于海上船舶工作環境的特殊性,航海類專業的實驗實訓項目涉及高危或極端環境、不可逆操作、高成本、高消耗、大型或綜合訓練等情況[4],因此,航海教育十分重視學生實踐能力的培訓,構建以高度仿真的虛擬實驗環境和實驗對象為主的實驗教學方式是航海教育與培訓的必然趨勢。航海儀器課程是航海技術專業的必修課程之一,航海儀器使用是航海儀器理論課程相對應配套的實踐教學環節,是對航海實踐技能要求較高的航海專業課程,其中,船用陀螺羅經的結構組成和啟動開機關機操作過程,是航海儀器使用重要的環節之一。傳統的船用陀螺羅經設備比較昂貴,頻繁開關機器會減少設備使用壽命,將虛擬現實技術應用于船用陀螺羅經實驗教學中,可有效解決該問題。
1 現有實驗課程存在的問題
船用陀螺羅經是利用陀螺儀的特性[5],在地球自轉運動的影響下,借助于力矩器使陀螺儀主軸自動地找北,并精確地跟蹤地理子午面的指向儀器。現有航海儀器設備船用陀螺羅經實驗課程主要存在真設備無法進行頻繁開關、真設備臺套數不足等問題。
1.1 真設備無法進行頻繁開關
船用陀螺羅經正常穩定時間大約4 個小時,即便有些船用陀螺羅經可以快速啟動,但也需要1 個半小時,由于船用陀螺羅經屬于貴重儀器設備,頻繁開機和關機對設備會造成損壞。每次上課對真設備進行講解時,只能開關機一次向學生講解開機和關機操作流程的注意事項。
1.2 真設備臺套數不足
實驗室里航海儀器船用陀螺羅經每種型號的真設備每個房間一般只放置一臺,有些真設備包含操作單元,真設備開機后,學生可以在操作面板單元進行操作,但由于每次上課人數較多,并不能保證每名學生都在操作面板單元操作一遍。
1.3 船用陀螺羅經主羅經內部結構無法被看到
船舶陀螺羅經的主羅經是陀螺羅經的重要組成部分,對于真設備,學生無法看到主羅經內部結構,以Sperry MK 37E 型為例,在航海儀器實驗室里,結合真設備講解實驗課程時,學生無法直觀看到主羅經內部的部件如液體連通器、叉形隨動環、方位隨動電機等。
2 虛擬仿真實驗教學平臺設計
2.1 場景建模
場景建模的質量直接決定了虛擬仿真實驗教學平臺的真實感和實時性。目前常用的場景建模軟件有MultiGen Creator、3D Studio MAX、Maya、DWB 等,這幾種場景建模軟件各有優劣。由于3D Studio MAX 軟件完全基于PC 平臺開發[6],對硬件的要求相對較低,易于學習和掌握,被廣泛應用于仿真、建筑、游戲、動畫等領域,在建模技術、環境控制、動畫設計、渲染輸出和后期制作方面日趨完善,內部算法也改進了很多,極大提高了制作和渲染輸出過程的速度。虛擬仿真實驗教學平臺選用3D Studio MAX 軟件對船用陀螺羅經整套設備場景建模,包含主羅經、電子控制箱、航向發送箱、分羅經等,船用陀螺羅經主羅經內部的陀螺球、液體連通器、叉形隨動環、阻尼重物、航向刻度盤、方位隨動電機等部件。
場景建模的真實感很大程度上依賴紋理來體現。紋理的處理可選用Adobe Photoshop 軟件完成,三維紋理貼圖可用DeepPaint 3D 輔助,燈光效果貼圖可用LightsScape 軟件。
為了場景建模軟件更加逼真,首先是場景建模素材收集,需要在實驗室里實地攝影和攝像,這樣可以對所建物體的形狀、顏色和外觀有真實的了解,拍攝的照片可處理成紋理后續使用,然后進行場景建模,此時需要設置建模軟件的單位、背景顏色和坐標系,根據建模物體的信息如長、寬、高等建造三維幾何實體模型,設置模型的顏色、材質、紋理和明暗等。
2.2 可視化過程
場景建模的可視化過程,需要視景驅動引擎,目前視景驅動引擎主要有OpenGVS、VTree、Vega、OSG、Unity3D 等,對這些視景驅動引擎進行了比較,各有優劣,例如OSG 是開源的,基于OSG 的三維仿真應用,效果不亞于商業軟件,但是技術要求較高;OpenGVS 是Quantum3D公司的產品,具有良好的模塊性,但不支持GPU編程。
虛擬仿真實驗教學平臺的視景驅動引擎選用Unity3D 軟件[7],該軟件支持多平臺,支持3d Studio MAX、Maya、Blender 等主流的三維格式,貼圖材質可以自動轉換為U3D 格式,支持C#、JavaScript 編程,提供具有柔和陰影以及高度完善烘焙效果的光影渲染系統,界面簡單直觀,易于上手。通過該視景驅動引擎,實現了船用陀螺羅經MK37 可視化過程。
2.3 實驗教學平臺課程內容
結合中華人民共和國國家海事海船船員適任考試要求和教學大綱要求,航海儀器使用船用陀螺羅經實驗課程主要包含兩部分內容:部件識別和設備操作啟動過程。
2.3.1 部件識別
在航海儀器實驗室,為解決真設備無法拆卸,學生無法了解其內部結構的問題,教師可利用虛擬仿真教學實驗平臺實現對船用陀螺羅經的拆卸,精細地了解船用陀螺羅經內部的結構組成,以及這些部件的工作原理和作用。
2.3.2 設備操作啟動過程
船用陀螺羅經斯伯利SPERRY 37MK 真設備啟動過程復雜,設備啟動后穩定時間較長,有時正常下課后,真設備仍沒有達到穩定。由于頻繁啟動關閉真設備會影響真設備的使用壽命,教師授課時,針對真設備只做一次啟動過程。為了調動學生學習的積極性,虛擬仿真實驗教學平臺包含了設備操作啟動過程,使學生學習由被動變為主動,極大地提高了學生學習的主動性和實踐創新性。圖1 為船舶陀螺羅經的啟動過程,此時控制發送箱上的指示燈已亮起,從圖中可以看出,方式轉換開關的MODE 開關已轉到START 擋位,此刻陀螺馬達已經接通電源,為使陀螺馬達高速旋轉,在該擋位停留10 分鐘(時間以墻上的鐘表走時為準),在圖的左上面虛擬仿真實驗教學平臺多開了一個視口,用于觀察主羅經航向刻度盤的轉動。當船用陀螺羅經主羅經正常啟動后,要考慮速度和緯度誤差補償。
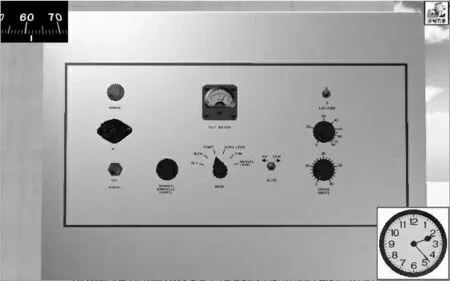
圖1 船舶陀螺羅經的啟動過程
利用3D Studio MAX 建模軟件和視景驅動引擎結合Unity 3D,開發了虛擬仿真實驗教學平臺即斯伯利船用陀螺羅經37MK 設備。在實驗室里,教師利用真實的設備講解,將理論知識有效地與實驗過程相結合。當學生對真設備有了感性的認識后,帶領學生在實驗室利用該虛擬仿真實驗平臺開展實驗教學,讓學生在虛擬仿真軟件中動手展開相關實驗項目,教師對學生的實驗過程進行指導和監督。該虛擬仿真實驗教學平臺使得傳統的以教師為中心的教學方式逐漸演變為師生并重甚至以學生為中心的教學方式,由傳統的被動教學方式轉變成了寓教于樂的主動學習過程,有效補充和促進了傳統教學,是對傳統教學的課外延伸和拓展。
3 結語
利用虛擬仿真實驗教學平臺,船用陀螺羅經采用虛擬與現實相結合、認知與操作相結合的實驗教學方法,通過理論學習、實驗室真設備學習、虛擬仿真設備操作訓練相結合的教學模式,可以拓展學生的學習資源,豐富學生的學習內容,提高學生學習的主動性,激發了學生參與實驗的積極性,符合現代化的實驗教學發展。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中國特種設備安全(2022年6期)2022-09-20 02:52:28
甘肅教育(2020年4期)2020-09-11 07:42:36
物理之友(2020年12期)2020-07-16 05:39:20
甘肅教育(2020年8期)2020-06-11 06:10:04
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:26:08
中國教育技術裝備(2016年11期)2016-12-01 06:53:03
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
