基于卡爾曼濾波的液壓升塔控制方法研究*
2023-11-21 13:08:08蕭定輝卞佳音何澤斌陳建強林新生曾慶華鄭子杰
電子器件 2023年5期
關鍵詞:卡爾曼濾波
胡 燃,蕭定輝,卞佳音,何澤斌,陳建強,林新生,曾慶華,鄭子杰
(1.廣東電網有限責任公司廣州供電局,廣東 廣州 510000;2.華南理工大學自動化科學與工程學院,廣東 廣州 510000)
隨著輸電桿塔周圍電網的快速發(fā)展,輸電桿塔基礎被掩埋或者輸電線路導線跨越道路、建筑物時導線對于跨域物凈空距離不足等安全隱患事件頻繁出現(xiàn)。目前國內行業(yè)中常規(guī)采用的解決方法是在桿塔附近新建一座高桿塔,再拆除舊的低桿塔,這樣的方案耗時長、成本高,而且桿塔附近不一定具備施工條件。所以在滿足安全條件下,能夠使桿塔原地升高對于解決該類問題具有積極的現(xiàn)實意義,不單單能夠解決導線對地安全距離不夠的安全隱患,還能最大限度地節(jié)約停電時間、減少施工成本。
桿塔整體提升常用的方法有兩種:一種是吊車式整體提升,通過大型吊車,將桿塔整體提升,其方案要求施工現(xiàn)場具有大型吊車進場條件,施工費用高。一種是抱桿式的整體提升,通過四條抱桿,以液壓機將桿塔四條主材同時提升到一定的高度,與吊車提升方法相比,該方法對周圍施工環(huán)境要求不高,其能夠實現(xiàn)自動化、電子化,減少吊車人工操作造成的風險。而液壓升塔的實現(xiàn)中最重要的是在升塔過程中對塔身姿態(tài)的精準測量并以此基礎對升高過程中進行桿塔調平。傳統(tǒng)的方法以經緯儀監(jiān)視鐵塔的高度,以卷揚機拉線穩(wěn)定桿塔,保證鐵塔垂直升高[1-4]。傳統(tǒng)方法中缺乏塔身姿態(tài)測量對桿塔提升和調平的優(yōu)化,卷揚機拉線穩(wěn)定桿塔可能會使桿塔受力不均發(fā)生傾斜倒塌,其安全性難以保障。為了能夠提高桿塔提升和調平的安全性,需要監(jiān)控鐵塔傾斜角度,并根據傾斜角度合理調節(jié)不同液壓桿的上升速度和高度。目前液壓調平控制研究中有房懷英等[5]提出的采用角傳感器作為控制量輸入器,并以模糊PID 作為調平控制方法來實現(xiàn)對瀝青砂漿車液壓的調平。有王冰[6]提出的基于PID 神經網絡對調平系統(tǒng)進行控制的方案。有史海紅[7]提出的對混凝土攤鋪機調平裝置采用人工神經網絡控制器來代替?zhèn)鹘y(tǒng)的測量和控制方式。有馮儀等[8]提出的車載雷達機電式自動調平控制系統(tǒng)。在以上研究中僅僅考慮了液壓調平算法的優(yōu)化,并沒有考慮作為液壓調平算法所依賴的測量數據的優(yōu)化。
結合以上研究,本文提出利用液壓桿整體提升桿塔的方法,在提升輸電塔的時候,采用IMU 和毫米級的RTK 傳感器測量塔身傾斜角度,并以卡爾曼濾波對其數據進行預測和更新去噪,對利用PID 控制算法控制液壓缸的提升速度更有效準確,最終實現(xiàn)整體提升過程中塔身處于無傾斜的姿態(tài),防止傾斜角度過大導致輸電鐵塔傾倒。此方案能夠以電子設備代替人力,保證施工的安全性,提高施工效率。
1 提升塔身過程中水平狀態(tài)的模型分析
本文提出方案是利用四個液壓桿對其塔身同時進行提升,如圖1 所示。
圖1 液壓升塔模型
在提升過程可能會因為液壓桿或控制信號延遲的因素,導致上升速度不同步的情況,這時候提升塔身過程中需要保持塔身處于一個安全的水平狀態(tài),當塔身發(fā)生較大傾斜的時候需要對其進行調平,調平后才能繼續(xù)提升作業(yè)至規(guī)定要求。對其塔身水平狀態(tài)進行模型分析是輸電線路桿塔提升過程中自動調平理論分析的關鍵,也是進行調平研究的基礎[9]。
所以對于傾角的測量至關重要,然而并沒有儀器可以直接讀出其傾角的具體值。本文利用IMU獲取其x軸、y軸、z軸方向的加速度值和利用毫米級RTK 獲取塔高對鐵塔的傾斜狀態(tài)進行預估。在輸電鐵塔的提升過程中,其運動狀態(tài)為勻速運動,可以認為輸電鐵塔除重力外并不受其他明顯外力的作用。IMU 這三個軸向的加速度值即物體的重力反映在每個軸上的分量,利用重力加速度與其三個分量之間的關系,能夠計算出物體的姿態(tài)角度。輸電鐵塔的塔基平臺在x軸、y軸、z軸的重力加速度分量與傾角的關系如圖2 所示。
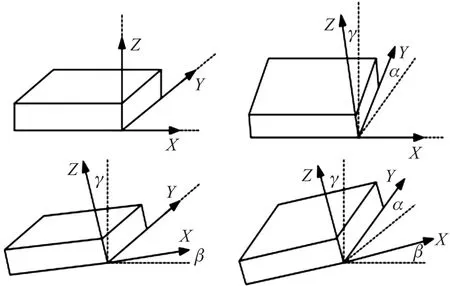
圖2 三軸加速度分量與傾角的關系
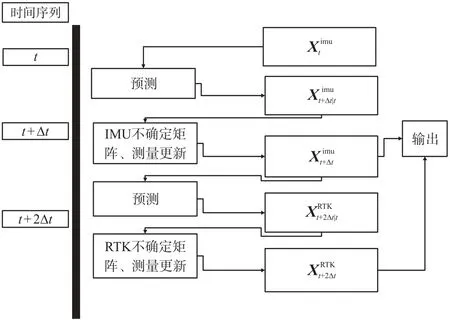
圖3 數據融合流程圖
以x軸為正方向,則輸電桿塔與y軸的夾角α、與x軸的夾角β、與z軸的夾角γ可以視作輸電鐵塔繞x軸、y軸和z軸的旋轉角度,本文利用α、β這兩個夾角對塔身狀態(tài)進行預估,利用γ作為調平誤差的控制量。用反三角函數代表加速度傳感器測量出的輸電鐵塔在x軸、y軸、z軸的加速度分量,考慮到反正弦函數的值域為(-π,+π),可以將α、β表示為以下公式:
傳感器的位置應合理放置在塔上。例如,如果測量軸z軸正面臨向上,測量軸x軸是與輸電線路的方向一致,那么就可以通過對于傳感器合理的布置獲取需要的角度數據。此外,塔體相對于自然重力軸線的傾角可以計算如下:
利用上述公式,可以計算出弧度值的數據,經過弧角度換算,可以算得角度值。
但由于桿塔處于野外環(huán)境中,由于外在氣象、地質環(huán)境及自身因素的影響,除了實際的搖擺和傾斜之外,振動雜波的干擾總是存在的[10]。但是加速度傳感器的靈敏度較高,上述的干擾會極大地影響其精確性,降低施工的安全性。因此有必要利用卡爾曼濾波算法對所采集到的IMU 數據與毫米級RTK的數據進行融合判斷。
2 基于卡爾曼濾波的多傳感器融合算法
對于鐵塔傾角數據采集,可以實時地從IMU 加速度傳感器讀取三個軸的加速度值,并實時計算上述α、β和γ角度值,再根據毫米級RTK 測量鐵塔高度h。這時候能夠得到由兩個在不同時間頻率上傳感器采集的兩個數據對同一個目標的描述[11],本文利用卡爾曼濾波算法對其進行數據融合。
所以在一個相對較短的Δt得到角值數據序列。振動噪聲為高斯分布,故可用一個線性微分方程來描述。使用IMU 對鐵塔狀態(tài)進行估計,鐵塔在提升過程中假設為勻速上升運動,那么定義其在t時刻的狀態(tài)向量為:
式中:xt+Δt|t為基于t時刻的狀態(tài)對鐵塔狀態(tài)進行預測,u為外部影響,在該模型中不受外力影響,無加速度,即u=0。F為狀態(tài)轉移矩陣:
式中:Q為過程噪聲,然后預測完畢,對其進行測量數據更新。
式中:,htower為桿塔塔身高度,htowercos為根據三角關系計算的桿塔塔身的實際高度,v·Δt為在Δt時間中桿塔提升的高度,兩項之和為t+Δt時的塔尖高度。毫米級RTK 同樣使用上述卡爾曼濾波進行預測和更新,不同在于:
3 液壓缸控制算法
在卡爾曼濾波下從IMU 獲取α、β作為控制器調平策略選擇變量,根據液壓桿特性,液壓桿若允許下降導致電力塔抖動,使得鐵塔造成更大的傾斜,所以液壓升塔過程中的液壓桿控制策略采取只升不降,并采取追逐最高點調平策略[12]。
對四個液壓桿分別編號如圖4 所示,然后制定圖5、圖6 所示的液壓提升控制策略。
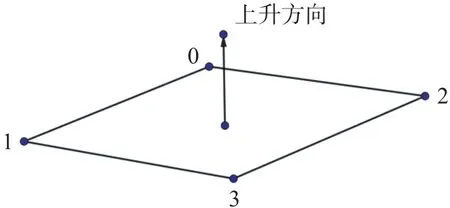
圖4 四個液壓桿編號圖
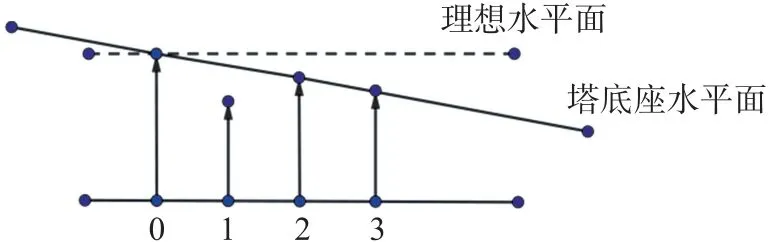
圖5 追逐最高點調平圖
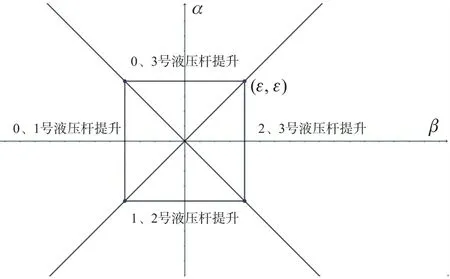
圖6 調平控制策略圖
然后計算高度誤差:
作為控制量,根據PID 控制算法進行控制。PID 公式為:
式中:u(t)是被控制量,e(t)是實際輸出值和期望輸出值之間誤差,Kp是比例系數,KI是積分系數,KD是微分系數。PID 控制原理是基于系統(tǒng)輸出值的反饋控制的,關鍵是把系統(tǒng)的輸出值和期望值的誤差作為控制量。其中Kp是直接影響到實際控制效果的,在合理的數值范圍內Kp越大,控制效果越好,越短時間回到期望值,但也容易導致抖動,無法穩(wěn)定于期望值;KD影響的是控制量向期望值靠近時的加速度,即使得靠近期望值的過程相對平滑;而只有KD控制會導致控制量一直與期望保持一個恒量差值,再者KI是來抵消這個恒量的。計算最終高度差:
式中:hfinal為最終設定升塔的高度。以Ep<σ作為抬升過程結束條件,其中σ為誤差閾值。其控制流程如圖7 所示。
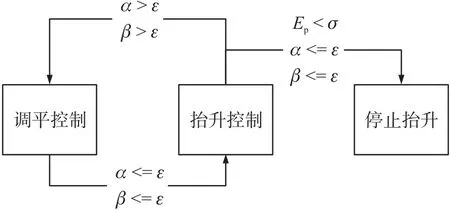
圖7 控制流程圖
4 實驗分析與結果
4.1 實驗條件
為了驗證以上方法的可行性和有效性,我們在實驗室搭建了液壓升塔模型來進行仿真實驗,如圖8 所示,在模型塔中搭載IMU 和毫米級RTK 傳感器監(jiān)測升塔過程,仿真其升塔過程并測試了我們所提出的桿塔升塔方案。在實驗中記錄其升塔過程中IMU 和RTK 信息,驗證其卡爾曼濾波的效果,并在實際升塔過程要求鐵塔提升過程中傾斜角不可以超過3°,即ε=3°。在實驗中模型塔的高度為70 cm,預升高高度為80 cm,設定實際高度和理想高度的差值不可以超過0.1 cm,即σ=0.1 cm,在實驗過程中以是否超出該值來判斷該方案的可行性。
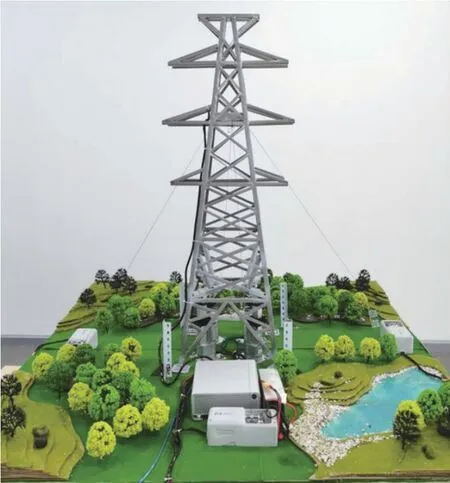
圖8 液壓升塔模型
4.2 實驗結果分析
在去噪更新預測的情況下,獲得的測量數據會更加靠近真值,使得控制更有效。而其控制效果我們記錄了桿塔升塔過程中α、β的變化曲線和高度誤差,如圖9、圖10 所示。

圖9 α、β 的變化曲線圖

圖10 不同測量方案下的高度誤差曲線
可以看出利用卡爾曼濾波使得傳感器返回的數據更加平穩(wěn),去噪效果更好,而IMU 傳感器返回的數據會隨著時間的增加,誤差會逐漸變大,這是因為IMU 傳感器本身的特性所導致的,所以我們利用IMU 和毫米級RTK 傳感器進行數據融合,使得IMU傳感器本身誤差會累積的特性得到很好消除。
從圖10 中我們可以看出所提出升塔控制方案α、β的變化曲線和高度誤差曲線變化并不劇烈,且從開始到升塔完成的過程中,能夠被控制在閾值范圍內,說明其控制是有效的,然后根據實際高度和理想高度的差值變化一直處于安全范圍內,可以得出我們此升塔控制方案是可行的。
5 結論
我們提出了利用IMU 和毫米級RTK 的傳感器在液壓升塔過程中對鐵塔高度、傾斜角度進行基于卡爾曼濾波的狀態(tài)估計,并且對兩種傳感器在不同頻率上進行數據融合,在實驗中驗證其測量數據更具魯棒性。在保證數據真實可靠的前提下,我們提出以PID 為控制原理,以鐵塔的水平傾斜角度設計了調平控制策略,并在實驗中記錄高度誤差變化,驗證了調平策略的有效性和可行性。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
