基于表面波紋特征的PIV 明渠表面流速測量方法研究
2023-11-21 13:08:14楊慧慧
電子器件 2023年5期
關鍵詞:測量
王 磊,朱 威,楊慧慧
(1.國能江蘇電力工程技術有限公司,江蘇 鎮江 212006;2.東南大學能源與環境學院,江蘇 南京 210096)
我國是世界上洪澇災害頻繁、嚴重的國家之一,洪水災害不僅范圍廣、發生頻繁、突發性強,而且會造成極大的損失。據統計,洪水災害造成的經濟損失和人員傷亡,在各種自然災害中位居第一。自然河流的水文監測,特別是雨季流速場及河道流量等測量數據的獲取對于洪水應急預防具有重要意義。
目前,我國河流、渠道流速及流量的測定主要采用接觸式測流技術,最為常用的方法為轉子式流速儀法[1]、超聲波時差法[2]和多普勒ADCP 法[3-4]。轉子式流速儀存在機械慣性、響應速度慢等缺點,無法測量快速變化的湍流,流量較大時無法入水測量,并且需要定期檢定和維護,運維成本較高。超聲波時差法使用的超聲波流量計對水質要求較高,儀器必須工作于清水或僅有少量漂浮物的水域中,在渾濁的水中或在測量狹窄的渠道時精度較差。多普勒ADCP 法的主要缺點是必須進行船載測量,需要人工操作,在測量泥沙或雜質含量較高的水質時準確度較差,且對于寬度較小的渠道或流量較大時無法進行測量。總體而言,天然河流復雜的紊動特性,加之惡劣的現場環境大大增加了水文監測的難度,導致傳統接觸式測流方法在河道水流監測中面臨著諸多挑戰。
近年來,非接觸式河渠水流監測技術在傳感器及嵌入式技術的推動下取得了長足進步,基于聲學[4-5]、光學[6]、雷達[7]及圖像[8-9]的測流儀器顯著提高了水文監測的準確性與時效性。特別是以粒子圖像測速(Particle Image Velocimetry,PIV)為代表的圖像法瞬時全場流速測量技術,因其可獲得全流場的瞬時流動信息及較高的測量精度,滿足對大尺度、高雷諾數、復雜邊界流動的研究需求,導致該技術在高洪期及淺水低流速等極端現場條件下河道水流監測中的應用潛力得到了廣泛關注。在河渠流速測算領域中應用改進后的PIV 算法,能有效避免傳統接觸式測量方法測量歷時久、測量效率低的弱點,實現高精度持續測量,具有重要的工程意義。
1 PIV 算法原理分析
PIV 測速法[10-16]是上世紀70 年代末發展起來的一種瞬態、多點、非接觸式的流體測速方法,其主要核心為對示蹤粒子(本論文中視河面水波紋為示蹤粒子)在已知短時間間隔的位移進行分析,間接提取流場的瞬態速度分布。示蹤粒子在流場中的二維速度可以表示為:
式中:,vx、vy為該粒子沿x、y方向的瞬時速度,Δt為測量的間隔時間為沿x、y方向的平均速度。當Δt足夠小時的大小即可精確地反映該粒子瞬時速度vx、vy。
實際應用中,常用高清CCD 相機以固定姿態對流場中待測區域粒子進行連續拍照。由于整個待測區域含有大量粒子,很難從不同底片中分辨出同一粒子,因此無法獲取所需位移矢量信息。通過圖像處理的方法可將待測區域分為若干子區域(簡稱相關窗口),采用相關窗口的互相關算法可求得窗口內粒子的位移矢量。t時刻粒子位于(x,y)處的窗口(當前窗口1),t+Δt時刻粒子所處的窗口可利用當前窗口1 和搜尋窗口(窗口2,3,…)進行互相關運算獲得。最大互相關峰值位置處窗口,即t+Δt時刻粒子所處的窗口。
2 算法改進及全局標定法
2.1 算法改進
經典的互相關算法往往運算量大、耗時長,為了提高運算效率,本論文采用傅里葉(FFT)變換,以多幀連續互相關和窗口迭代縮小的方法,來實現互相關函數的運算[17],使得結果更加貼合實際、分辨率更高。圖1 為基于FFT 的互相關算法流程圖。
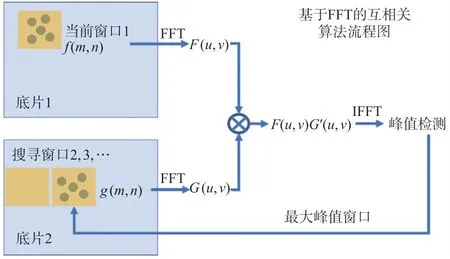
圖1 基于FFT 的互相關算法流程圖
分別對第一幀圖像和第二幀圖像的相關窗口進行進行快速傅里葉變換,得到F(u,v)和G(u,v),然后對兩頻域變換結果做卷積得到相關窗口內粒子像的能量譜,其中G'(u,v)是G(u,v)的復共軛變換(FFT');最后對頻率空間的能譜進行傅里葉逆變換IFFT,得到相關窗口的互相關函數(3)。對相關平面進行峰值檢測找到最大峰值對應窗口便可獲得位移矢量信息,代入式(1)及式(2)計算后得到二維像素速度場分布。
2.2 全局標定法實現流速場修正
2.1 節所提出的改進算法可對拍攝圖像進行快速處理分析,得到空間分辨率較高的二維像素速度場信息。在本論文的河流流速測算應用場景中,需要對河道固定區域進行流速流量全面測量,由于現場環境的復雜性以及拍攝區域尺度較大,為保證圖片的穩定性和清晰度,往往需要將相機以一定角度架設在河岸俯拍河面。透視作用將導致拍攝得到的圖片“遠小近大”,圖片尺寸一致性差。如圖2 所示,棋盤格正視圖(橫線上方)內格子尺寸均勻等大,透視圖(橫線下方)尺寸變化較大。后續流速場的修正需要考慮該透視因素,利用標定實現像素速度場到真實空間速度場的尺度轉換。
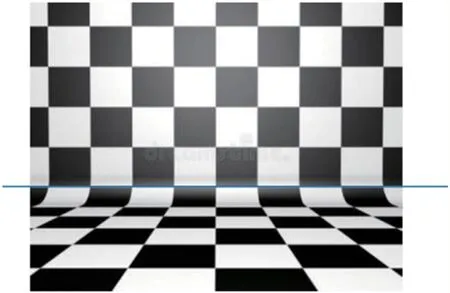
圖2 棋盤格正視(橫線上方)及透視(橫線下方)效果比較圖
本論文提出全局標定法,分為橫向(x方向)插值標定以及縱向(y方向)區域平均標定。相機在現場確定拍攝姿態后,返回實驗場地,以相同姿態完成標定,得到圖像全局像素-實際尺寸轉換關系。
橫向插值標定:已知標定區域內兩平行線的尺度轉換關系,對其進行線性插值,即可得到全局橫向轉換尺寸。如圖3 所示,實驗室內地面正方形瓷磚尺寸一致性好,均為15 cm×15 cm,在直線1 與直線2 上截取相同數目瓷磚的像素尺寸(例如在直線1、2 上分別截取3 塊瓷磚對應的像素尺寸,得到AB、CD),計算得到該方向上像素尺寸與實際尺寸的尺度轉換關系,對該尺度轉換進行橫向線性插值,即可得到該相機姿態下圖像橫向各像素與實際尺寸轉換關系,如圖4 所示。圖4 中每條橫線上兩星點之間間距為該方向上每個瓷磚對應的像素尺寸,由上到下呈現增長趨勢,與實際相符。
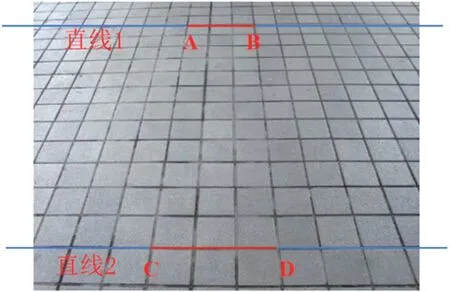
圖3 實驗室內標定地板瓷磚

圖4 橫向插值標定示意圖
縱向區域平均標定:由圖3 可知,由于在縱向不再滿足橫向的平行關系,因此很難實現縱向尺寸線性插值。為減小標定誤差,主要將標定區域等分為多個子圖,在每個子圖上分別進行縱向標定。原則上,子圖劃分越多結果越精準。如圖5 所示,將圖3劃分為4 個子圖,對其進行以下操作:
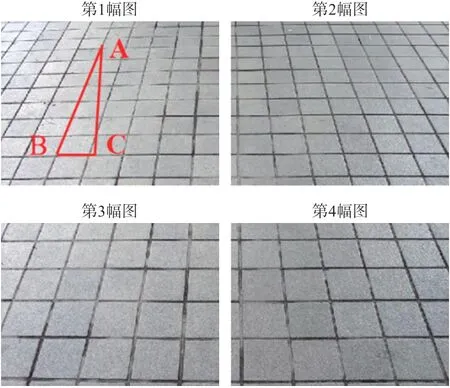
圖5 縱向區域平均標定示意圖
①在第i=1 幅子圖上,任意選取N個格子,連接兩端格子頂點A、B(圖中直線AB間N=7,AB=7×15 cm=105 cm);
②由橫向標定可得到B點所在橫線的橫向尺度轉換關系,帶入BC的像素尺寸即可計算得到BC實際長度;
③通過勾股定理計算得到AB在縱向上投影尺寸和尺度轉換關系。將該局部縱向尺度轉換視為該區域的區域縱向尺度轉換;
④對余下子圖i=2~4,重復步驟①~步驟③,即可得到全局范圍內的縱向像素-實際尺寸轉換關系。
3 實驗平臺搭建及測量
3.1 實驗平臺器材
實驗平臺由高清攝像機、伸縮三腳架、數顯角度尺和PC 端搭建而成,如圖6、圖7 及表1 所示。調節伸縮三腳架高度和高清攝像機拍攝角度,拍攝河渠表面,將采集得到的視頻信息上傳至PC 端進行分析處理,最后得到場流速測算結果。

表1 流速場測量實驗主要器材
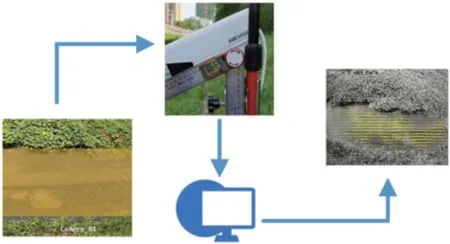
圖6 實驗平臺搭建示意圖

圖7 實驗器材
3.2 全局標定及流速測量
首先將相機及支架帶到河岸,調節支架高度以及相機角度,確保相機拍攝區域河渠水流波紋清晰。用卷尺和數顯角度尺記錄相機離水面高度以及姿態角度,用于后續實驗室全局標定。
其次進行參考水速的測量,在河岸固定兩竹竿,如圖8 所示,設置兩桿間距L為標記物漂流距離(該實驗中標記物為漂浮的樹葉),分別拍攝有標記物和無標記物兩段視頻。其中,有標記物視頻記錄標記物完整漂浮過桿過程,記樹葉漂浮過桿用時為t,標記物的平均速度可由L/t得到,作為參考速度與PIV 計算無標記物視頻所得速度進行比較。

圖8 標記為拍攝與參考流速計算
4 實驗結果分析
4.1 標定誤差
全局橫向標定誤差:利用2.2 中橫向插值標定的方法,將實驗中攝像機所攝圖像橫向方向等分為20 段,得到各段像素與實際尺寸的轉換關系,即尺度,如圖9 所示。在每段方向上利用數據游標標記一個瓷磚的像素尺寸,將其代入“尺度×像素尺寸”得到計算尺寸,與實際尺寸進行比較,可以得到相對偏差,如表2 所示。利用橫向插值標定的方法,全局平均相對誤差為5.81%,標準偏差為3.53%。
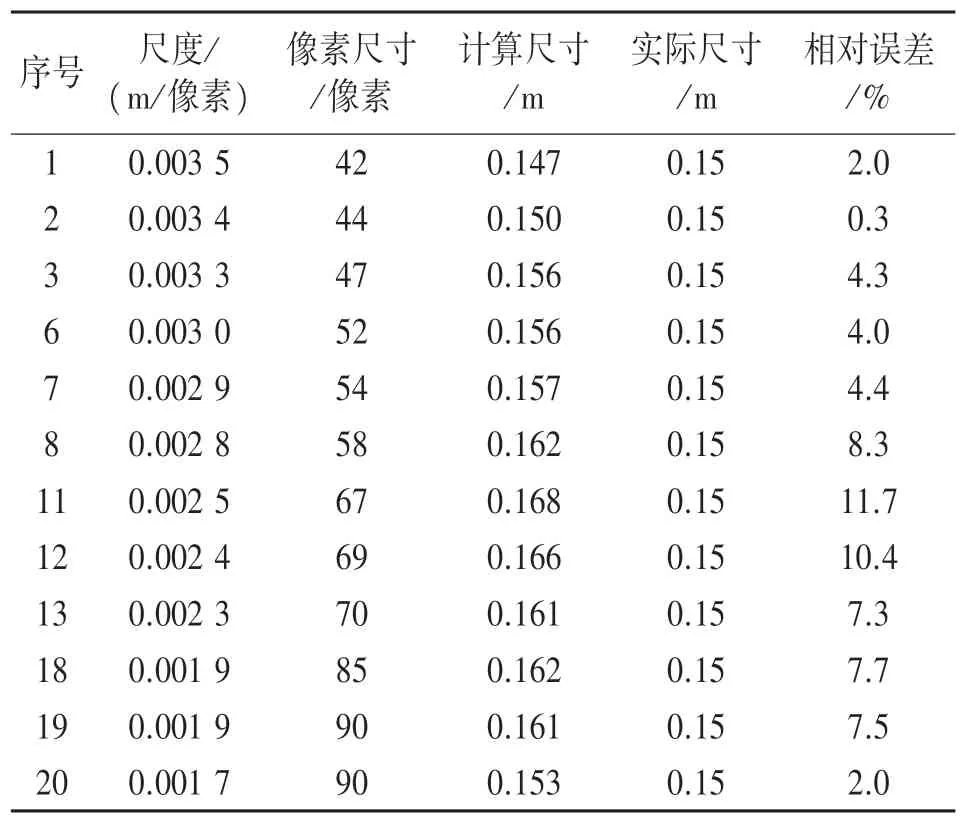
表2 流速場測量實驗橫向插值標定誤差
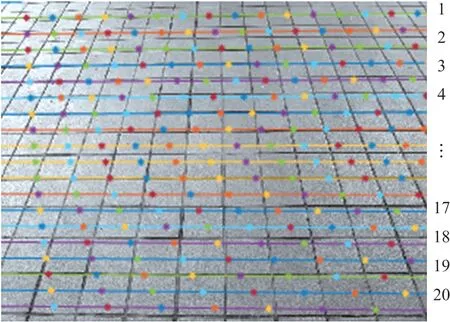
圖9 所攝圖像橫向各像素與實際尺寸的轉換關系
全局縱向標定誤差:利用2.2 中全局縱向標定的方法,將拍攝圖像等分為多個子圖,得到各子圖內像素與實際尺寸的轉換關系,即尺度。在各子圖的縱向方向上利用數據游標標記一個瓷磚的像素尺寸,將其代入“尺度×像素尺寸”得到計算尺寸,與實際尺寸進行比較,可以得到相對偏差。為驗證子圖劃分數與測量精度是否相關,將相機拍攝得到圖像分別等分為4 子圖和16 子圖進行全局縱向標定。
對于4 子圖的全局平均縱向標定如表3 所示,在同一子圖內,取三個不同的區域(用a,b,c 表示)進行尺寸計算,與實際尺寸比較得到該區域的相對偏差。全局平均相對誤差為8.03%,標準偏差為9.54%。
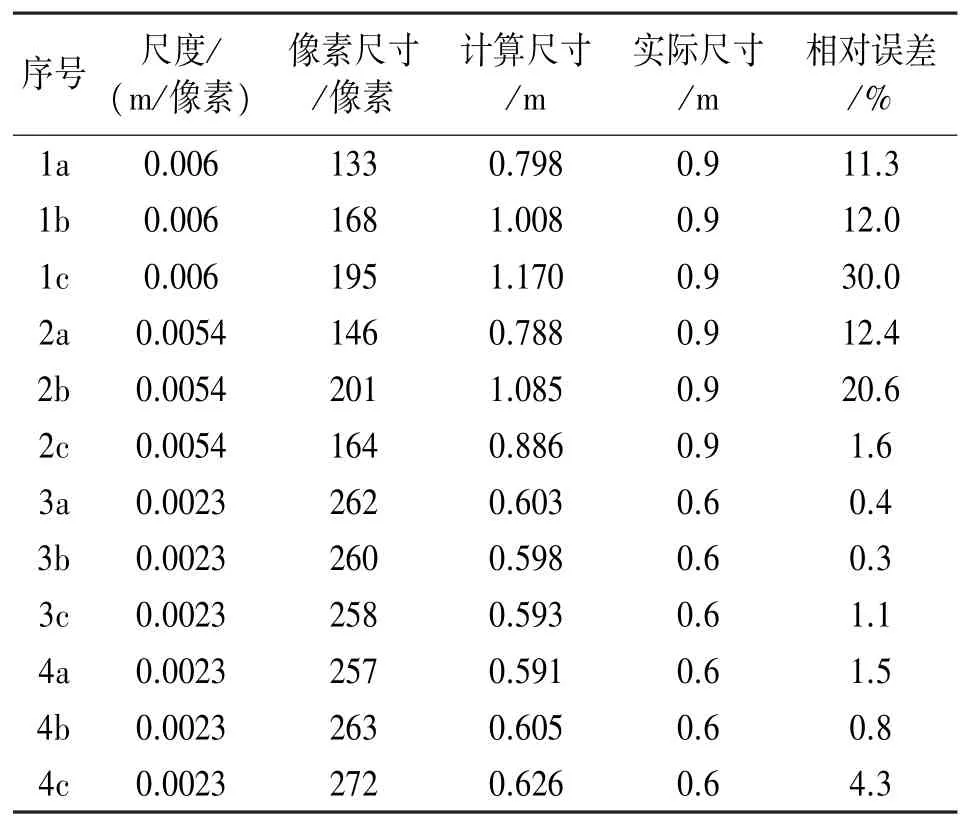
表3 流速場測量實驗4 子圖縱向標定誤差
用相同的方法對16 子圖進行全局平均縱向標定,其全局平均相對誤差為5.07%,標準偏差為5.44%。
相較于4 子圖,16 子圖劃分更精細,尺度轉換更貼近局部真實情況,因此相對誤差更小,標定效果更佳。在拍攝范圍較廣的區域內,橫向插值標定與縱向平均標定仍可將標定相對誤差控制在6%以內,準確度較高。
4.2 測量誤差
沿河岸不同位置截取三段河道分別測量水流流速,按照3.2 中所述設定標記物及其漂流距離,結合漂流時間即可求得三段河道的參考水速,如表4所示。
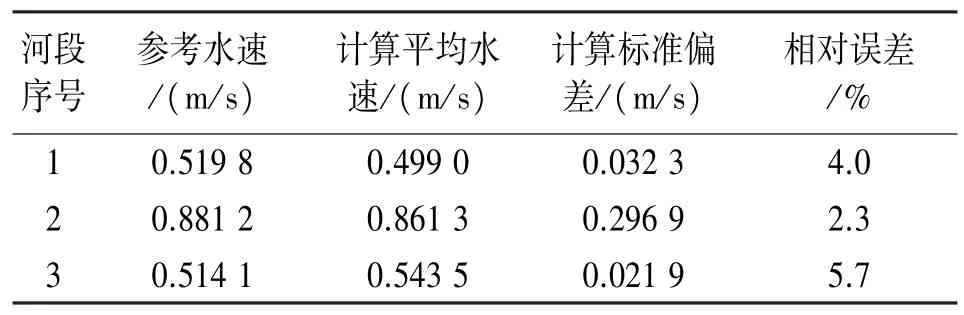
表4 流速場測量實驗測量誤差
用2.1 中改進的PIV 算法分別分析計算錄制的視頻,得到拍攝區域內全局流速場分布,如圖10 所示。箭頭方向代表水流流速方向,箭頭尺寸大小和速度快慢呈正相關。
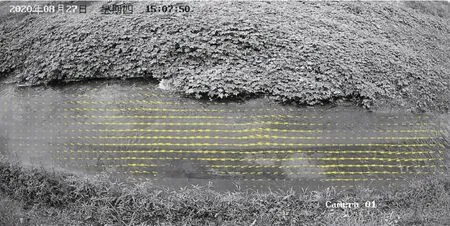
圖10 改進后PIV 算法求得的流速場分布圖
由表4 可知,三條河段計算得到的平均水速與參考水速間相對誤差均保持在6%以內。三段河道相對誤差平均值為4%,結果與實際較為貼近。
4.3 誤差分析
標定誤差與測量誤差數值整體均在6%左右,但局部存在偏差,引起該偏差的潛在原因包括:
①相機拍攝存在畸變,例如水平線在拍攝圖像邊緣地帶呈現向下彎曲趨勢,而拍攝中心地帶則保持水平。
②橫向插值標定與縱向平均標定的精確度取決于橫向插值數與子圖分割數,即插值數與子圖分割數越多,像素尺寸與實際尺寸的局部對應關系越精準。
5 結論
本文利用一種基于快速傅里葉變換的互相關改進算法,以多幀連續互相關和窗口迭代縮小的方法,來實現互相關函數的運算,有效地減少了互相關的重復計算量,提高了運行速度。實驗結果表明,文章提出將測量監視圖像與實際空間尺寸一一對應轉換的全局標定法,結合改進后的算法,使得結果更加貼合實際、分辨率更高,可在河渠場流速測算中得到較好的應用。計算所得流速場速度與實際水流流速的相對誤差可保證在6%以內。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
