新型模型參考自適應的PMSM無差拍電流預測控制
2023-11-03 10:53:28張懿徐斌魏海峰李垣江劉維亭
電機與控制學報 2023年9期
關鍵詞:模型
張懿, 徐斌, 魏海峰, 李垣江, 劉維亭
(江蘇科技大學 電子信息學院,江蘇 鎮江 212100)
0 引 言
永磁同步電機(permanent magnet synchronous motor,PMSM)具有體積小、質量輕、功率高等特點,因此廣泛普及于民用、航天及軍事等領域。當前,電流環控制策略有:電流預測控制[1-4]、電流滯環控制[5-8]、PI電流控制[9-12]和自抗擾控制[13-14]等。截至目前,應用最廣的是傳統PI電流環控制,由于其結構簡單以及低通濾波的特性,導致超調量較大,適用于滯后性和慣性比較大的場合。電流滯環控制的算法比較復雜,并且其開關頻率受負載的影響較大,而自抗擾控制研究目前還未達到一定的深度,因此算法實現難度大。為了滿足高精度領域的需求,無差拍電流預測控制可以讓系統的電流環得到更快的響應輸出,同時電流的紋波小,控制算法也容易實現,但由于無差拍電流預測控制受電機參數的影響較大,當電機參數不準確或者工作環境改變,都會導致交直軸電流出現偏差,隨著轉速的增大,交直軸電流偏差就會越大。文獻[15]設計了基于Lagrange插值的無差拍電流預測控制 (deadbeat predictive current control,DPCC)算法,雖然提高了魯棒性,但也降低了一定的動態效果。文獻[16]提出了一種新的功率滑模趨近律,縮短系統的收斂時間,然后建立了一種改進功率滑模趨近律的非齊次擾動觀測器,保證電流誤差收斂至0,最后建立一種新型定子電流和擾動觀測器的改進型DPCC。模型參數擾動的問題基本得到解決,但是計算復雜,對計算機硬件要求高。文獻[17]在無差拍電流預測控制中引入魯棒電流預測算法,提高了系統電流環的動態性能和穩態精度,但是研究對象只針對電感參數失配,在實際應用中,電機運行受限不只是電感參數的問題。文獻[18]通過加入模糊前饋控制器來降低參數的敏感度,從而提高魯棒性,但是目前只停留在仿真階段,沒有考慮實際應用環境中的電機控制,缺乏實驗依據。文獻[19]提出了一種非線性擴展狀態觀測器和權重因子相結合來改進DPCC的方法,估計的電流擾動和電壓擾動可以分別用來校正電流參考值和輸出電壓,以此提高系統的魯棒性,但設計過程較為復雜。文獻[20]為了實現讓電流誤差為0,需要提供補償給反饋電流,將引入電流預測的補償因子來修正電壓,以此提高系統的魯棒性,但是該方法比較影響系統的動態性能。
為了解決由于參數失配導致無差拍電流預測控制動態跟蹤性和魯棒性差的問題,本文提出一種基于新型模型參考自適應系統的參數分步辨識法。首先獲取定子電感和定子電阻參數,將其作為已知量來辨識轉子磁鏈。等到轉子磁鏈參數穩定后,再針對定子電阻和定子電感進行辨識。其次,將辨識出的參數代入無差拍電流預測控制進行改進,可以有效解決參數辨識模型存在的欠秩問題,增加電機參數辨識的精確度,同時可以抑制參數失配對無差拍電流控制系統的影響,從而提高系統的動態跟蹤性和魯棒性。最后通過實驗驗證該方法的有效性。
1 無差拍電流預測控制
1.1 永磁同步電機數學模型搭建
為了簡化設計,因此假設PMSM滿足以下理想情況:
1)忽略電機的鐵心飽和;
2)不計渦流和磁滯損耗;
3)電機電流為對稱的三相正弦波。
基于以上理想情況,永磁同步電機在d-q軸下的定子電壓方程為:
(1)
式中:ud、uq和id、iq分別是d-q軸下的定子電壓和定子電流分量;Rs是定子電阻;Ld、Lq是d-q軸電感;ωe是轉子電角速度;ψf是轉子磁鏈。
1.2 無差拍電流預測控制的實現
采用表貼式永磁同步電機,利用其d-q軸電感相等的特性,即Ld=Lq=L。將d-q軸電流作為狀態分量,得到的電流狀態方程數學模型為:
(2)
由于電流的采樣時間短,則本文采用一階泰勒公式將電流狀態方程進行離散化,即離散化的數學模型近似為:
(3)
式中:id(k)、iq(k)是第k時刻的d-q軸電流變量值;id(k+1)、iq(k+1)是第k+1時刻的d-q軸電流變量值;Ts是電流的采樣時間值。通過將式(3)代入式(2),可以計算出無差拍電流預測控制中第k+1時刻的離散化d-q軸電流變量值控制方程為
(4)
式中:
無差拍電流預測控制的實際意義是為了實現控制系統下一刻的輸出電流能夠跟上給定電流,則需要將控制系統的給定電流值作為下一個時刻的輸出電流值,因此,需要根據離散方程和d-q軸的給定電流值計算出控制電壓,以此來實現下一時刻的輸出電流經過單獨的電流采樣周期后能夠跟上給定電流。通過式(4)可以計算出無差拍電流預測控制中所需的d-q軸電壓控制方程為
(5)
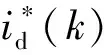
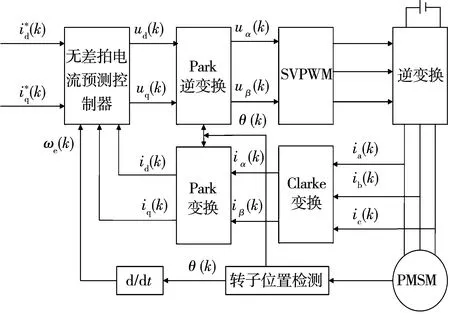
圖1 無差拍電流預測控制系統結構框圖Fig.1 Structural block diagram of traditional DPCC system
(6)
在實際進行永磁同步電機控制過程中,基于電機參數準確的情況下,則在第k+1時刻的d-q軸輸出電流值將會達到給定電流值。若電機參數失配的情況下,則第k+1時刻的d-q軸輸出電流值將會和給定電流值出現誤差。根據式(4)可以計算出無差拍電流預測控制中第k+1時刻的離散化d-q軸實際電流變量值控制方程為
(7)
式中:
其中:Rs0是定子電阻實際值;L0是定子電感實際值;ψf0是轉子磁鏈實際值。
將式(6)代入式(7)可得:
(8)
式中:ΔR=Rs-Rs0;ΔL=L-L0;Δψ=ψf-ψf0。
當系統達到穩定時刻,可從上式看出,定子電阻和定子電感均會影響d-q軸電流,而轉子磁鏈只會影響q軸電流。由此可見,電機參數的精度偏差會影響整個電機電流環控制的性能,因此,增加電機參數辨識的精度就可以抑制參數失配對電機的性能影響,使得整個控制系統運行具有穩定性。
1.3 無差拍電流預測控制的穩定性
基于Ts的開關周期很小,因此將式(8)進行Z變換,可以得出d-q軸給定電流和實際電流的離散域閉環傳遞函數為
(9)
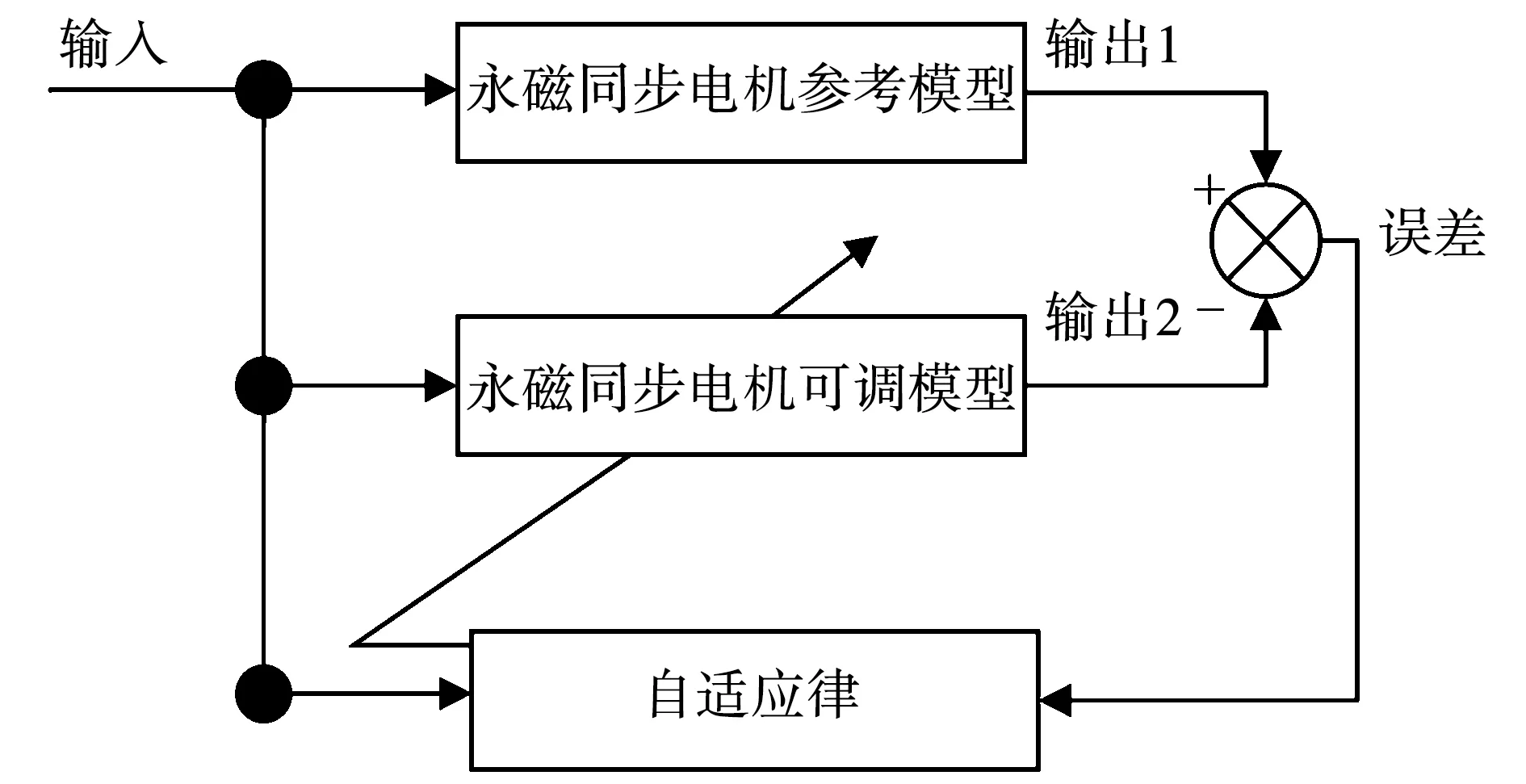
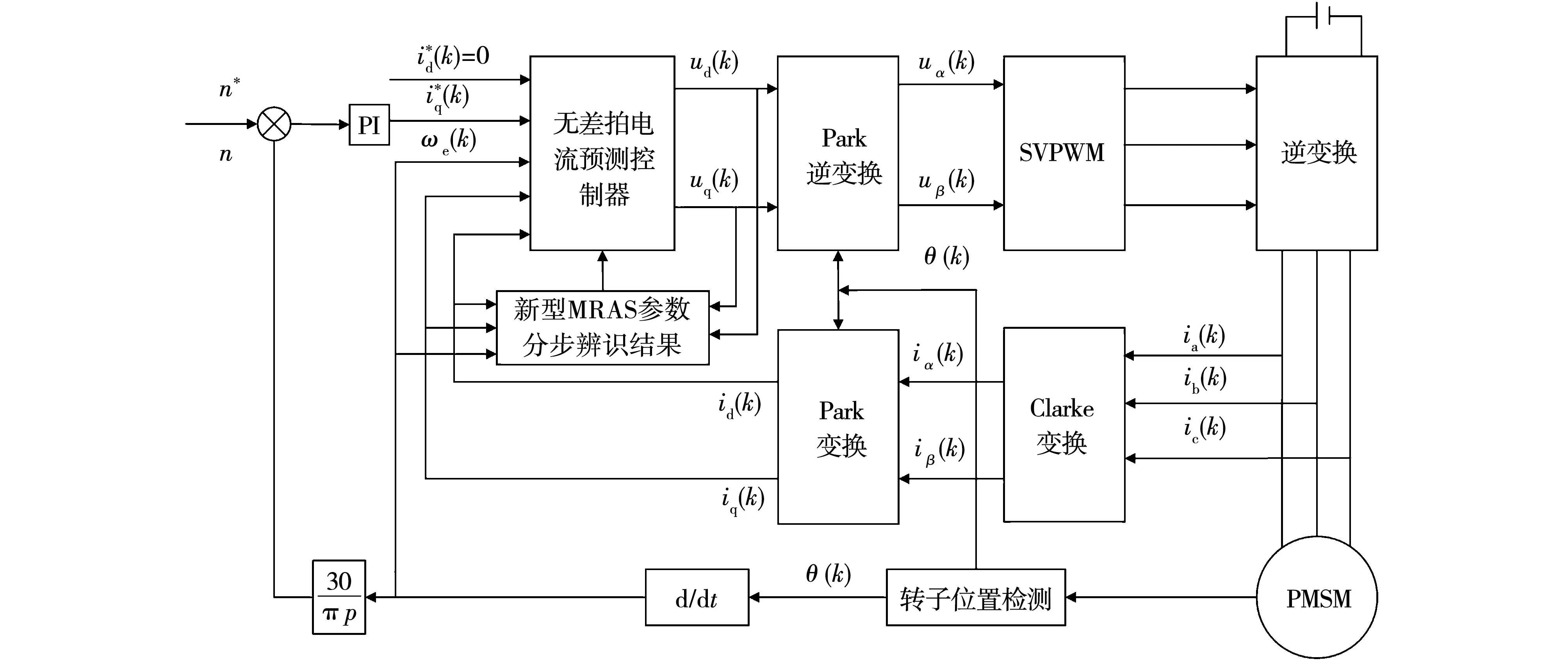
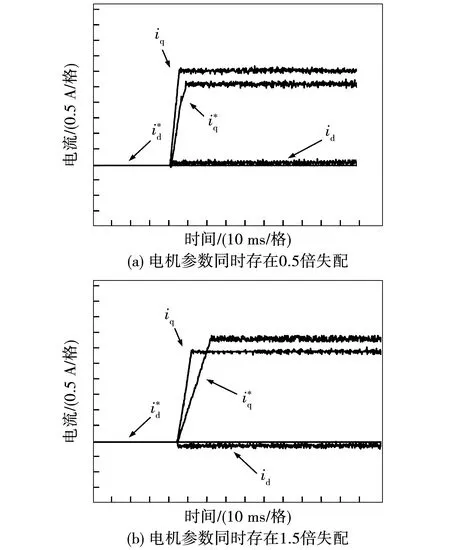
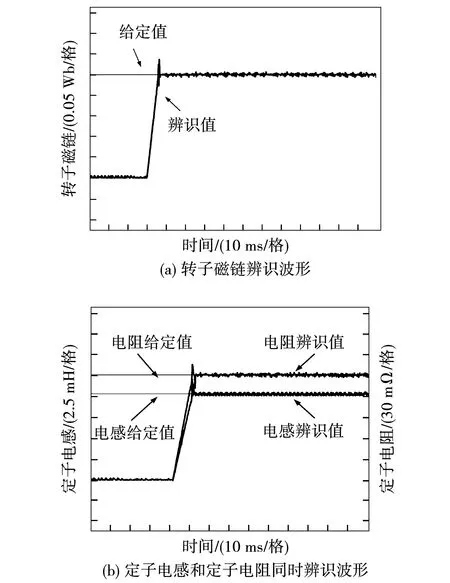
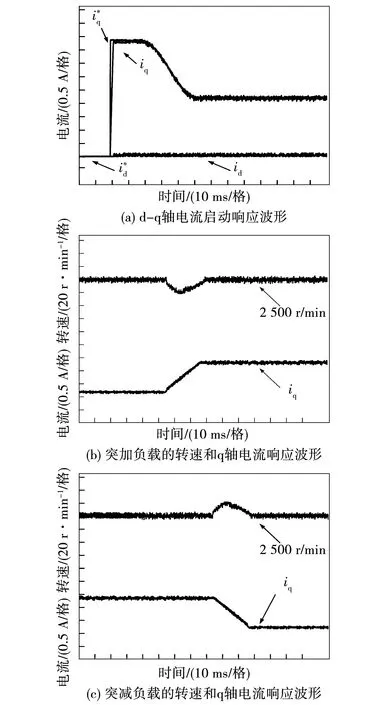
0 (10) 由式(10)可知,要使系統穩定,則定子電感值需在該范圍內,假如超出該范圍,則系統是不穩定的。 圖2為傳統模型參考自適應系統(model reference adaptive system,MRAS)結構框圖,由參考模型、可調模型和自適應律共同組成。該系統主要實際意義在于求得一種能夠實時進行動態調整的反饋自適應律,使得當前系統的閉環控制性能可以和參考模型的性能相一致,因此構造出兩個模型,其中一個將不含待辨識參數的電流狀態方程作為永磁同步電機參考模型,而將含待辨識參數的電流狀態方程作為永磁同步電機可調模型,將這兩個模型輸出量作差,當得出的輸出誤差送入自適應律進行實時動態調整至0時,則可調模型就等效于參考模型,而待辨識參數的估算值就等效于參數的實際值。本文結合Popov超穩定性理論設計自適應律,該設計方法可以降低計算量,同時可以保證待辨識參數的穩定性。 圖2 傳統模型參考自適應系統結構框圖Fig.2 Structural block diagram of traditional MRAS system 如式(2)所示,永磁同步電機數學模型的電流狀態方程是2維的,在需要辨識電機3個參數的情況下,會存在欠秩情況,從而導致電機參數的失配,影響電機的控制性能。因此,本文采用參數分步辨識的方法,其系統結構框圖如圖3所示。 具體的辨識過程如下: 1)固定定子電阻和定子電感,以上電機參數均可從電機參數銘牌上獲取; 2)將不含待辨識參數的電流狀態方程作為永磁同步電機參考模型,將步驟1獲取到的定子電阻和定子電感參數值作為已知量代入進電流狀態方程中,設計出含待辨識參數的可調模型。由于轉子磁鏈只和q軸電流狀態方程相關,所以只需采用q軸電流狀態方程即可。此時只有一個未知量,方程存在唯一解,從而設計自適應律來辨識轉子磁鏈; 3)待轉子磁鏈辨識穩定后,將已知的轉子磁鏈代入第二個可調模型中,用來辨識定子電阻和定子電感,此時只有2個未知量,針對2維的電流狀態方程存在唯一解,再設計自適應律來辨識定子電阻和定子電感。 由于轉子磁鏈只和q軸的電流方程有關,通過式(2)可得q軸的電流狀態方程為 (11) 對應的可調模型為 (12) 由式(11)~式(12)可得一階誤差系統為 (13) 為了滿足該系統的全局穩定,根據Popov超穩定性理論可知,需要滿足以下條件: (14) 式中γ2是有限正數。將eq和F代入式(14)可得: (15) 這里將轉子磁鏈的自適應律設置為比例積分形式,具體形式如下: (16) (17) 將式(17)拆分成積分項和比例項,即: (18) (19) 將式(19)代入式(18)可得: (20) 式中ki和kp均大于0。由式(20)進行變換可得: (21) 由式(21)可知,式(18)成立,因此式(17)成立。即該系統全局穩定,則有: (22) 因此,將式(22)代入式(16)并化簡,轉子磁鏈的自適應律為 (23) 當轉子磁鏈辨識穩定后,對定子電阻和定子電感進行辨識,通過式(2)可得參考模型為 (24) pI=AI+BU+C。 (25) 可調模型為 (26) 電流狀態方程式(26)可化簡為 (27) 將式(25)減去式(27)得 (28) pe=Ae-F。 (29) 根據上述的Popov穩定性定理,要想使反饋系統保持穩定,則需滿足: (30) (31) 將式(31)拆成如下兩部分: (32) (33) (34) (35) 因此,通過式(23)和式(35)辨識過程完全穩定后,則可得到定子電阻、定子電感和轉子磁鏈的辨識值,該辨識值就是式(7)中定子電阻實際值Rs0、定子電感實際值L0和轉子磁鏈實際值ψf0。 本文研究重點在于電機參數失配對無差拍電流預測算法的性能影響及如何進行改進。針對提出新型模型參考自適應系統的參數分步辨識來改進無差拍電流預測控制,通過實驗的方法來驗證其有效性。本文采用id=0的矢量控制,圖4為改進后的無差拍電流預測控制系統結構框圖。 圖4 改進后的無差拍電流預測控制系統結構框圖Fig.4 Structure block diagram of improved DPCC system 本次實驗使用意法半導體ST公司的STM32F417作為電機控制器的主控芯片,6個半橋臂采用安世半導體nexperia的BUK9M35-80E,實驗用400 W的表貼式永磁同步電機,其參數如表1所示,本次實驗平臺搭建如圖5所示。實驗過程分為三個階段,首先進行無差拍電流預測控制器參數和電機參數不匹配的性能實驗,觀察電機參數失配對性能的影響;其次進行新型模型參考自適應系統的參數分步辨識實驗,觀察基于該方法下的參數精度;最后將新型模型參考自適應辨識好的參數給入無差拍電流預測控制進行實驗,與電機參數同時失配的性能影響進行對比,得出改進后的結論。 圖5 實驗平臺搭建Fig.5 Construction of experimental platform 4.2.1 轉子磁鏈單獨失配的影響 圖6為轉子磁鏈在0.5倍和1.5倍失配下d-q軸電流啟動響應波形。 圖6 轉子磁鏈失配下d-q軸電流啟動響應波形Fig.6 d-q axis current start response waveform under rotor flux linkage mismatch 4.2.2 定子電感單獨失配的影響 圖7 定子電感失配下d-q軸電流啟動響應波形Fig.7 d-q axis current start response waveform under stator inductance mismatch 4.2.3 定子電阻單獨失配的影響 4.2.4 電機參數同時失配的影響 圖9為電機參數在0.5倍和1.5倍同時失配下d-q軸電流啟動響應波形,其中電機參數分別為轉子磁鏈,定子電感和定子電阻。實驗條件給定2 500 r/min的轉速啟動運行,其中圖9(a)為Rs0=0.5Rs,ψf0=0.5ψf,L=0.5L0同時失配下的d-q軸電流啟動響應波形,通過與圖6(b)、圖7(a)、圖8(b)相比,實際電流iq在穩態過程中產生了更大的跟蹤靜差,實際電流id在穩態過程中產生了一定的跟蹤靜差,實際電流iq的動態跟蹤性更差。其中圖9(b)為Rs0=1.5Rs,ψf0=1.5ψf,L=1.5L0同時失配下的d-q軸電流啟動響應波形,通過與圖6(a)、圖7(b)、圖8(a)相比,實際電流iq在穩態過程中產生了更大的跟蹤靜差,實際電流id在穩態過程中產生了一定的跟蹤靜差,實際電流iq的動態跟蹤性更差。由上述實驗結果可知,電機參數同時失配會對動態跟蹤性和魯棒性造成嚴重影響。 圖9 電機參數同時失配d-q軸電流啟動響應波形Fig.9 d-q axis current start response waveform under simultaneous motor parameters mismatch 圖10為新型模型參考自適應的參數分步辨識波形,表2為辨識結果總結。實驗條件給定2 500 r/min的轉速啟動運行,由圖10和表2可知,由于電機起步階段的不穩定性,導致辨識的電機參數發生了一定的超調,但是經過調節后迅速趨于穩定。其中圖10(a)為轉子磁鏈辨識波形,可知轉子磁鏈在30 ms左右開始辨識,辨識結果經過1.5 ms左右的調節時間收斂于0.25 Wb左右,得到的最大誤差為3.2%。其中圖10(b)為定子電阻和電感同時參數辨識波形,可知定子電感和電阻同時在42 ms左右開始辨識,定子電感辨識結果經過2 ms左右的調節時間收斂于10.2 mH左右,得到的最大誤差為2.3%,定子電阻辨識結果經過2.7 ms左右的調節時間收斂于0.15 Ω左右,得到的最大誤差為2.5%。由上述實驗結果可知,基于新型模型參考自適應的參數分步辨識算法可以在較短時間內收斂到參數給定值附近,并且最大誤差很小,達到了很好的參數辨識效果。 表2 辨識結果總結Table 2 Identification result summary 圖10 新型模型參考自適應的參數分步辨識波形Fig.10 Parameter stepwise identification of new MRAS waveform 圖11 參數分步辨識下的無差拍電流預測控制波形Fig.11 DPCC waveform under parameter stepwise identification 本文的實驗數據僅限于此次實驗搭建的平臺,而本次實驗電機參數辨識開始時的超調如何減小,有待進一步研究與分析。 以400 W的表貼式永磁同步電機為研究對象,本文針對參數失配會導致無差拍電流預測控制的動態跟蹤性和魯棒性差的問題,提出一種基于新型模型參考自適應系統的參數分步辨識來進行改進,通過實驗驗證分析可以得到以下結論: 1)電機參數失配會對無差拍電流預測控制產生一定的影響,包括:動態跟蹤效果差、跟蹤靜差大和魯棒性差,為后面進行改進提供了實驗依據; 2)通過新型模型參考自適應系統設計出參數分步辨識法,經過相關實驗驗證出此方法的辨識結果精度高; 3)將上述得到的參數辨識結果給入設計好的無差拍電流預測控制中,可以有效地抑制參數失配帶來的影響,減小了跟蹤靜差,提高了系統的動態跟蹤效果,同時增強了系統在負載突變下的魯棒性。 實驗結論表明,基于新型模型參考自適應系統的無差拍電流預測控制具有一定的實用性,但是本文實驗中參數辨識開始時的超調如何減小,有待進一步探究。2 新型模型參考自適應的參數分步辨識思想
2.1 傳統模型參考自適應系統的參數辨識
2.2 新型模型參考自適應系統的參數分步辨識
3 參數分步辨識實現
3.1 轉子磁鏈的辨識實現


3.2 定子電阻和定子電感的辨識實現




4 實驗結果及分析
4.1 實驗平臺搭建

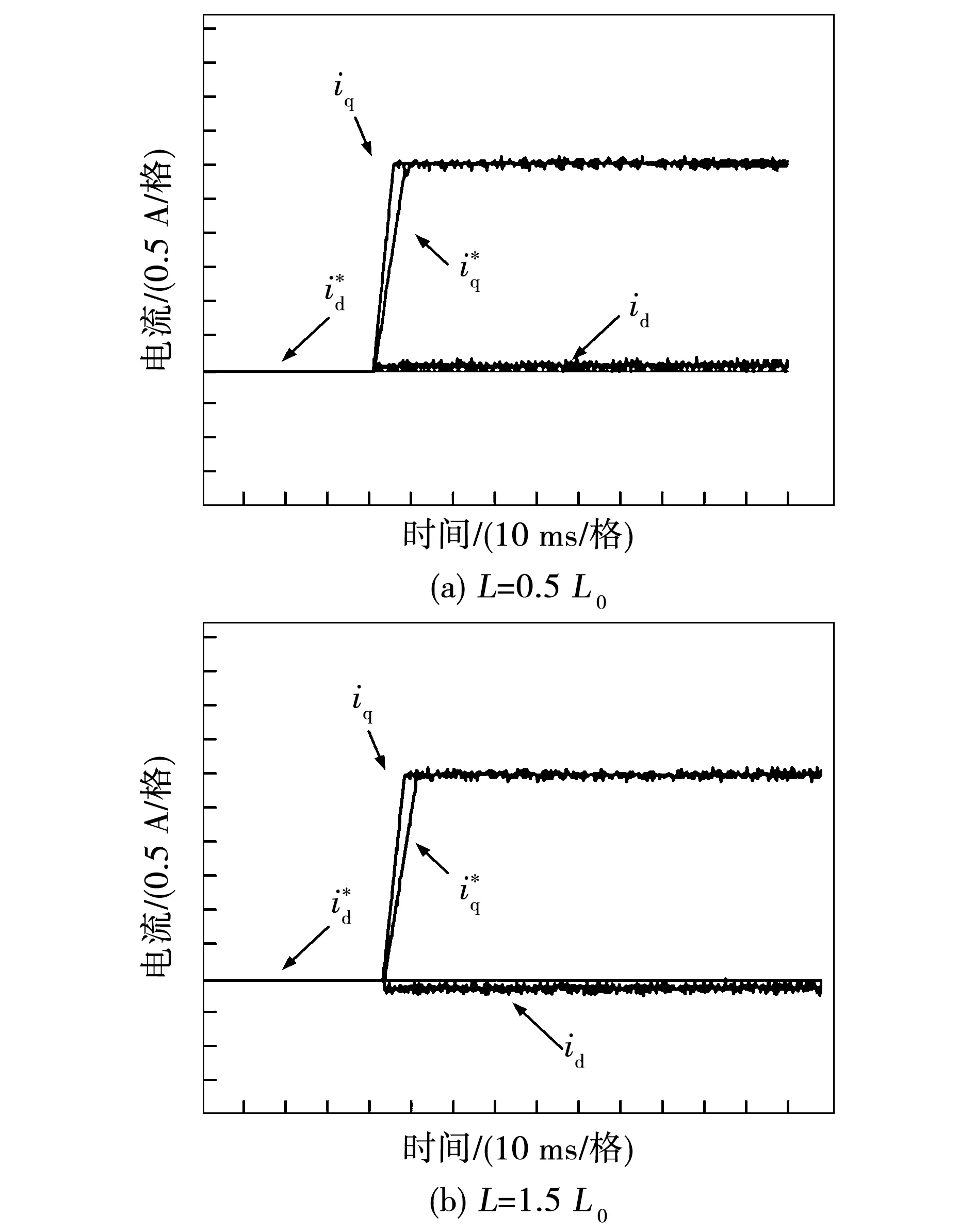
4.2 驗證電機參數失配對無差拍電流預測控制的性能影響



4.3 驗證基于新型模型參考自適應的參數分步辨識精度

4.4 驗證基于參數分步辨識算法下的無差拍電流預測控制性能

5 結 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19