全直流型船舶微電網多時間尺度綜合能量管理
2023-11-02 13:51:24周荔丹張明珠姚鋼于天佑趙敏
電機與控制學報 2023年9期
周荔丹, 張明珠, 姚鋼, 于天佑, 趙敏
(1.上海電力大學 電氣工程學院,上海 200090; 2.上海交通大學 電子信息與電氣工程學院,上海 200240;3.上海交通大學 船舶海洋與建筑工程學院,上海 200240)
0 引 言
近年來,以綜合電力推進系統為標志性技術特征的全直流型船舶,具有可靠性高、機動能力強以及維修成本低等優點而成為未來船舶的重要發展方向[1-2]。相較于傳統微網,船舶微網無法在航行過程中與主網交換功率,且由于船舶運行工況處于不斷變化的狀態,以及疊加的各類航行環境隨機變化等因素都會影響船舶運行的可靠性。為了保障船舶能夠安全可靠運行,將作為能量緩沖設備的儲能系統應用在船舶中[3],且相關船舶綜合電力系統能量管理方面的研究內容,已引起了國內外大量學者的廣泛關注[4-6]。
電能質量管理方面:文獻[7]提出了一種基于節點源荷差分電流的控制策略,在提高響應速度和精度的同時能夠降低直流母線電壓的波動;文獻[8]提出了一種基于直流微網技術的新型能饋系統,能夠實現系統源荷儲之間功率的合理分配和減小直流母線電壓的波動;文獻[9]建立了一個集成混合儲能系統的全電船舶模型,基于動態下垂控制方法有效改善了電能質量;文獻[10]在短時間尺度場景中,在提高全電船舶電能質量的前提下平抑了功率波動;文獻[11]提出了一種適用于多微電網互聯的不同時間尺度階梯控制方法,提高了并網的可靠性和安全性;文獻[12]提出了一種基于模糊邏輯控制的能量管理系統,在穩定直流側母線電壓的基礎上能夠根據儲能的荷電狀態改變其充放電速率,提高了儲能的使用壽命。
多目標優化的長時間尺度下負荷經濟調度方面:文獻[13]提出一種實時模型預測控制能量管理策略,在減小母線電壓波動和儲能損耗的前提下能解決混合儲能系統負載功率波動大的問題;文獻[14]提出一種基于優化荷電狀態反饋的混合儲能能量管理策略,在平抑負載功率和直流波動的前提下延長了儲能的使用壽命;文獻[15]采用啟發式和模型預測控制相結合的混合能量管理算法,能夠實現功率的動態平衡;文獻[16]提出一種考慮蓄電池壽命損耗的最優船舶儲能系統經濟調度模型,有效地減小了船舶負荷峰谷差和延長了儲能設備的使用壽命,具有較高的經濟性;文獻[17]提出一種虛擬電阻電容下垂控制和二次荷電狀態恢復控制方法用于船舶中壓直流系統,有效地緩解了推進負荷和脈沖負荷動態變化引起的功率波動;文獻[18]提出一種基于最小使用成本及儲能狀態平衡的孤島直流微電網能量管理方法,能夠在滿足電壓穩定和功率平衡的基礎上,通過系統底層和頂層之間的協調控制,更好地完成整個系統的能量管理。
由于上述電能質量管理和長時間尺度下負荷經濟調度方面的文獻沒有進行綜合能量管理。因此本文提出一種多時間尺度下分層控制的綜合能量管理策略,將短期和長期兩個時間尺度結合起來,分別提出相應的控制策略,最后通過仿真和算例驗證所提策略在短期負荷波動下能夠實現直流側母線電壓的穩定和供需功率的平衡,在長期運行下不僅提高船舶微網的經濟性,還起到削峰填谷和平滑負荷曲線的作用。
1 本文問題描述
1.1 系統拓撲
船舶微電網系統拓撲結構如圖1所示,該系統由發電機、儲能單元、各類變換器、推進器以及其他生活負荷共同構成,其中發電單元和儲能單元兩者共同作用通過輸電線路為各類推進器及生活負荷提供電能。
1.2 船舶運行模式
柴電混合動力船舶的驅動動力源由柴油發電機和儲能設備共同組成,其運行模式和運行工況種類較多,本文總共考慮了5種船舶運行工況,分別是啟動并逐級加速、遇到障礙物轉向后繼續加速運行、到達安全區域后減速運行、懸浮前進以及低速前行。重點研究以下3種運行模式(具體的能量流動如圖2所示)。
1)發電機推進運行模式。
該模式適用于當船舶處于低速前行等負載需求功率較小的運行工況,此時僅靠發電機的出力就可以滿足系統的功率需求,儲能如果未達上限則對其進行充電,否則其處于備用狀態。
2)發電機和儲能共同推進運行模式。
該模式適用于當船舶處于加速或負載突增等運行工況,由于發電機的輸出特性不能快速響應功率突變,此時應由發電機和儲能兩者共同作用來滿足航行中負載功率的需求。
3)主動減載模式。
該模式適用于發生一些突發狀況如果發電機的出力無法滿足系統功率需求時,此時負荷若正常工作,將因功率不平衡導致直流母線電壓出現較大幅度的下降,在仿真中可以根據負荷的重要程度切除一部分生活負荷以保證重要負荷的可靠供電。
1.3 船舶多時間尺度分層控制
船舶系統結構較為復雜且設備種類繁多,其動態過程的時間跨度較大,包含微秒時間尺度下的開關器件換向過程、毫秒到秒短時間尺度下的電壓穩定和功率實時平衡以及分鐘到小時長時間尺度下的安全經濟運行等等。由于不同時間尺度的復雜程度以及對控制實時性的要求都不同,因此針對該問題,本文從各時間尺度出發,提出了如圖3所示的船舶多時間尺度分層控制結構。
本文的研究重點即在該分層控制結構框架下,研究短期大功率推進器接入所帶來的負荷功率驟增所帶來的電壓穩定和供需功率平衡問題以及長期運行下滿足船舶可靠性和經濟性的要求,搭建了以燃料費用和儲能電池使用成本總運行費用最低的運行成本模型,并采取智能算法來迭代優化供電單元的出力。系統關于短期和長期的總體運行策略如圖4所示。
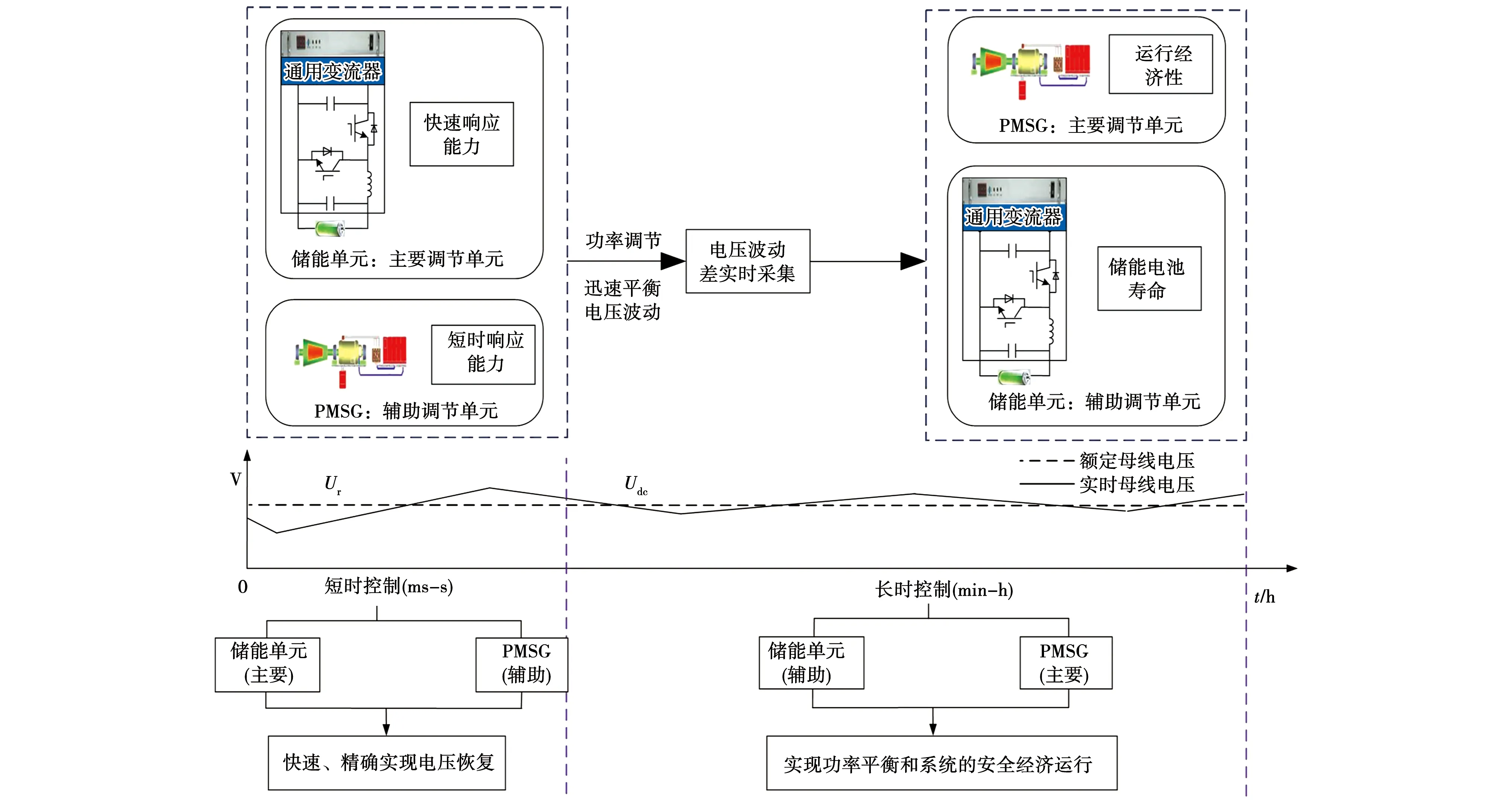
圖4 船舶能量管理總體運行策略Fig.4 Overall operation strategy of ship EMS
2 船舶能量管理模型
2.1 系統建模
2.1.1 發電機模型
船舶發電單元一般通過船舶微網將柴油機所產生的電能合理分配給各類負荷,以滿足船舶用電的可靠性。對于傳統柴油發電機的燃料成本模型[19],本文采用多項式來近似表示柴油能耗特性函數,其能耗特性
F(t)=c1Pdie(t)+c2Pdier(t)。
(1)
式中:Pdie(t)為t時刻單臺柴油發電機組輸出的平均發電功率;Pdier(t)為單臺柴油機組的額定功率;c1和c2是多項式系數。
本文取c1和c2為0.23和0.057 5,則柴油發電機組的燃料成本Cdie(t)可表示為
(2)
式中m為柴油的價格。
2.1.2 儲能單元模型
儲能充放電模型如下:
(3)

2.1.3 負荷模型
在船舶綜合電力系統中,需求側負載一般可分為以下三類[20]:剛性負荷、可時移負荷、可中斷負荷。剛性負荷是維持船舶基本航行的負荷,這類負荷中斷將會造成重大的設備損壞,產生很嚴重的影響,如推進負荷等;可時移負荷指的是短時重復使用的負載,如空調之類的負荷等;可中斷負荷指的是偶爾短時使用的負載,如探照燈等之類的負荷。
1)剛性負荷建模。
在自然坐標系下對剛性負荷永磁同步電機進行建模,其磁鏈方程、轉矩方程和推進功率方程[21]為:
ψs=Lssis+ψf;
(4)
(5)
(6)
2)可時移負荷建模。

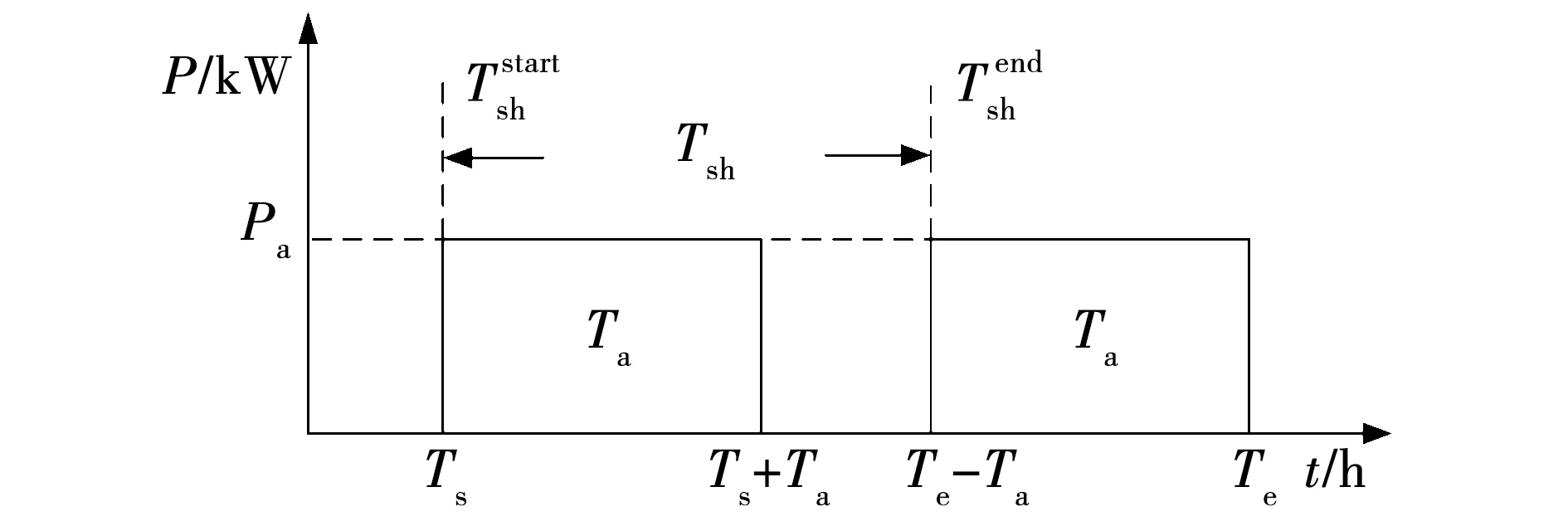
圖5 可時移負荷時移區間Fig.5 Times shifting load time shifting interval
可中斷負荷與可時移負荷的特性較為類似,這里不再重復,可時移負荷建模如下:
(7)
Ssh(t)≥Ta[Ssh(t+1)-Ssh(t)],
(8)
(9)
式中:Ssh(t)表示負荷的狀態,為1表示負荷處于運行中,為0表示設備未運行;Psh為可時移負荷的功率;Esh為可時移負荷的總功耗。
2.2 系統協調控制
2.2.1 永磁同步電機矢量控制
六相永磁同步電機的控制策略采用id=0的轉子磁場定向矢量控制策略,該控制的優點在于控制方法簡單易實現,可以避免轉子永磁體退磁。
基于矢量空間解耦理論得到六相電機的控制模型,模型中包含涉及能量轉換的基波dq子空間和z1z2子空間。得到dq軸下的數學模型[21]為:
(10)
式中:ud、uq、ed、eq分別為dq軸上的電壓和感應電動勢;Rs為定子電阻;id、iq分別為dq軸電流;Leq為等效電感;其中等效電感等于電機定子等效電感與變流器橋臂等效電感之和。
由式(10)可知,ud不僅與id、ed有關,還與iq存在耦合關系,同樣uq也是如此,因此在仿真中可采用前饋解耦方法來控制,用來消除電機感應電動勢擾動和id、iq之間的耦合。同時對諧波電流采用PI閉環控制來抑制z1-z2子空間的諧波分量在定子繞組產生的損耗,具體控制方程如下:
(11)
六相PMSM電流iabc與ixyz經過變換之后得到id、iq與iz1、iz2(參見圖6所示的矢量控制框圖),由于采用的是中性點隔離結構,所以o1-o2子空間中的電氣分量不予考慮。將得到的dq軸電流再與速度環輸出的電流給定量進行比較,然后經過PI調節之后得到相應的dq電壓,最后經過矢量SVPWM模塊產生PWM信號來驅動IGBT。
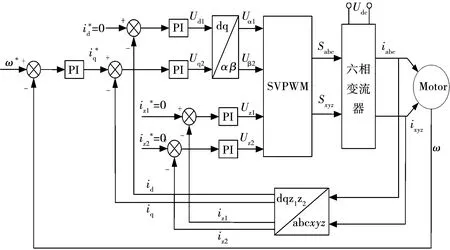
圖6 六相PMSM矢量空間解耦控制框圖Fig.6 Block diagram of six phase PMSM vector space decoupling control
2.2.2 儲能單元控制

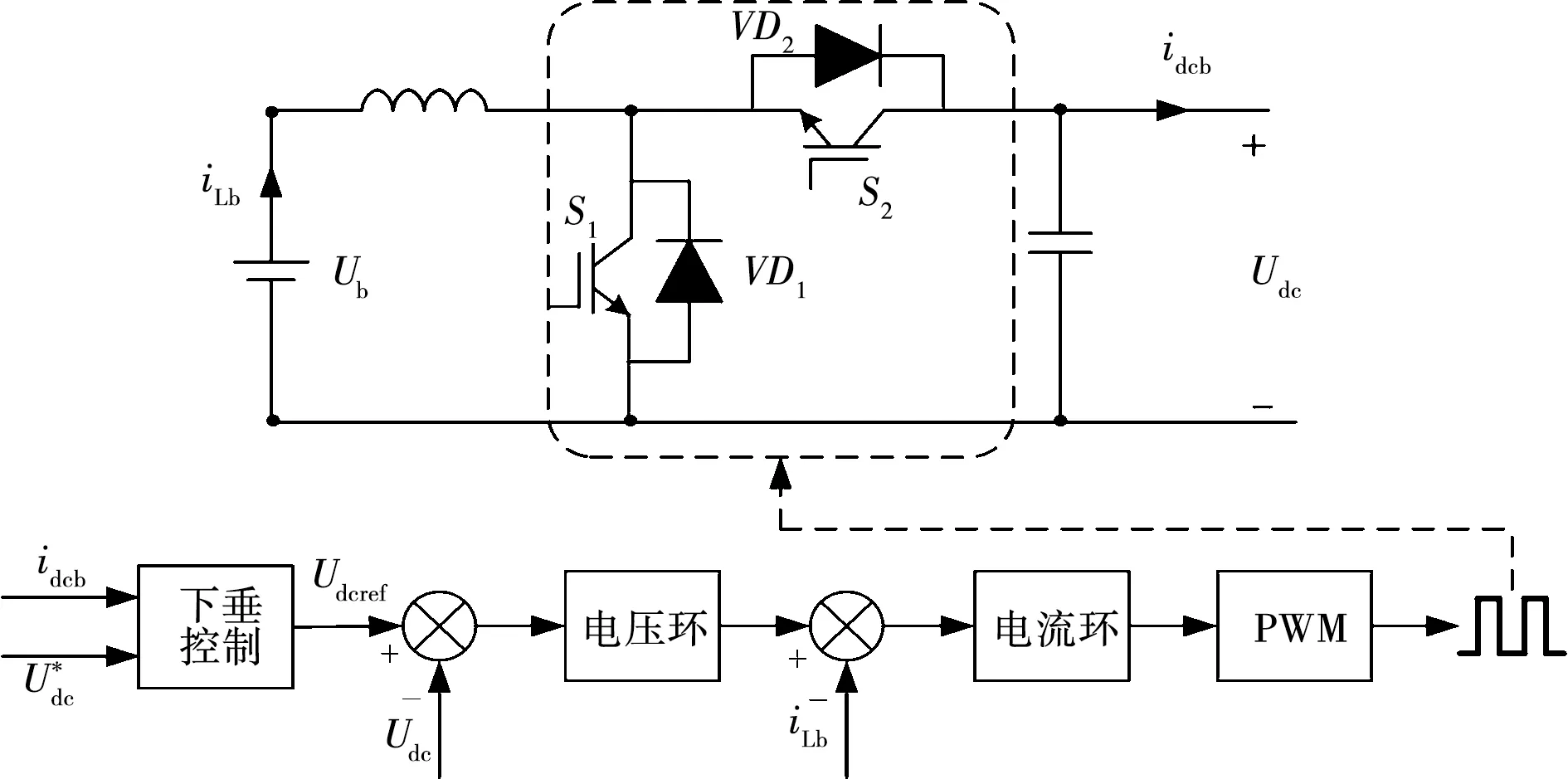
圖7 儲能單元及其控制框圖Fig.7 Energy storage unit and its control block diagram
2.2.3 負荷控制
負荷包括剛性負荷、可中斷負荷和可時移負荷,其中剛性負荷的控制策略見圖6所示,后兩種負荷只需要保證有穩定的電壓,采用電壓單閉環控制策略就可以實現,其控制結構如圖8所示。圖8中,Udcref為負荷單元所期望的電壓參考值;Ul為負荷電壓的實際值。
2.3 系統運行成本函數
1)目標函數。
以船舶微網系統的運行成本最低為目標函數,運行成本主要由燃料費用和儲能電池使用成本組成,因此目標函數可表示為
(12)
本文為方便分析,采用簡化計算,設t時刻儲能的折舊成本為
(13)
式中:N為儲能電池的循環使用壽命;CB為單組儲能電池的價格;n為儲能電池的個數;QB為儲能電池組的額定容量;ΔWbat(t)為t時刻儲能電池的電量變化。
2)約束條件。
①系統功率平衡:
Pdie(t)±Pbat(t)=Pload(t),?t∈[1,T]。
(14)
式中:Pload(t)為t時刻負荷需求功率的總和;Pbat(t)為t時刻儲能電池的輸出/吸收功率;T為一天24小時。
②柴油發電機運行功率約束:
0≤Pdie(t)≤Pdier(t),?t∈[1,T]。
(15)
③儲能電池電量約束:
兩相鄰時刻間儲能電池的電量約束為
Wbat(t)=Wbat(t-1)+ΔWbat(t),?t∈[1,T]。
(16)
式中Wbat(t)為t時刻儲能電池的電量。
儲能電池存儲和釋放電量的上下限約束為:
(17)
(18)

④發電機推進運行模式功率約束:
Pdie(t)=Pload(t)-Pbat(t),?t∈[1,T]。
(19)
⑤主動減載模式功率約束:
Pload(t)>Pbat(t)+Pdie(t),?t∈[1,T]。
(20)
3 模型分析與求解
3.1 模型分析
本文所提的分層控制結構涉及短期負荷波動下維持直流側電能質量和系統功率平衡的仿真問題,另外還涉及長期運行下提高船舶微網系統日運行成本經濟性的算例優化問題,因此擬采用結構分解的方法將本文所提的多時間尺度分層控制結構分為兩層分別進行求解。
3.2 模型分解
本文將1.3節所提出的船舶多時間尺度分層控制結構分解為兩部分,分別是采用基于規則的能量管理策略來解決短時間尺度下負荷大功率波動所帶來的電能質量和功率平衡問題以及長時間尺度下采用改進型烏鴉搜索算法(crow search algorithm,CSA)對船舶微網系統的日運行成本進行優化。
3.2.1 短期負荷波動下的能量管理
在船舶行駛過程中,由于短期大功率推進器的突然接入將導致系統功率驟增,會對母線電壓產生一個短時間的波動,此時如果某供電單元無法響應負荷突變可能會導致電能供應不足,因此有必要研究系統在短時間尺度下的控制策略。
針對負荷的短期波動采用基于規則的能量管理策略。該策略是目前應用最為廣泛的一種方式,具有設計簡單,魯棒性強,技術成熟等優點。該方法以推進電機負載轉矩的變化來模擬系統處于不同的運行工況,并根據要實現的目標、系統當前的需求功率以及各設備的運行情況,來完成功率的分配。具體的規則如圖9所示。
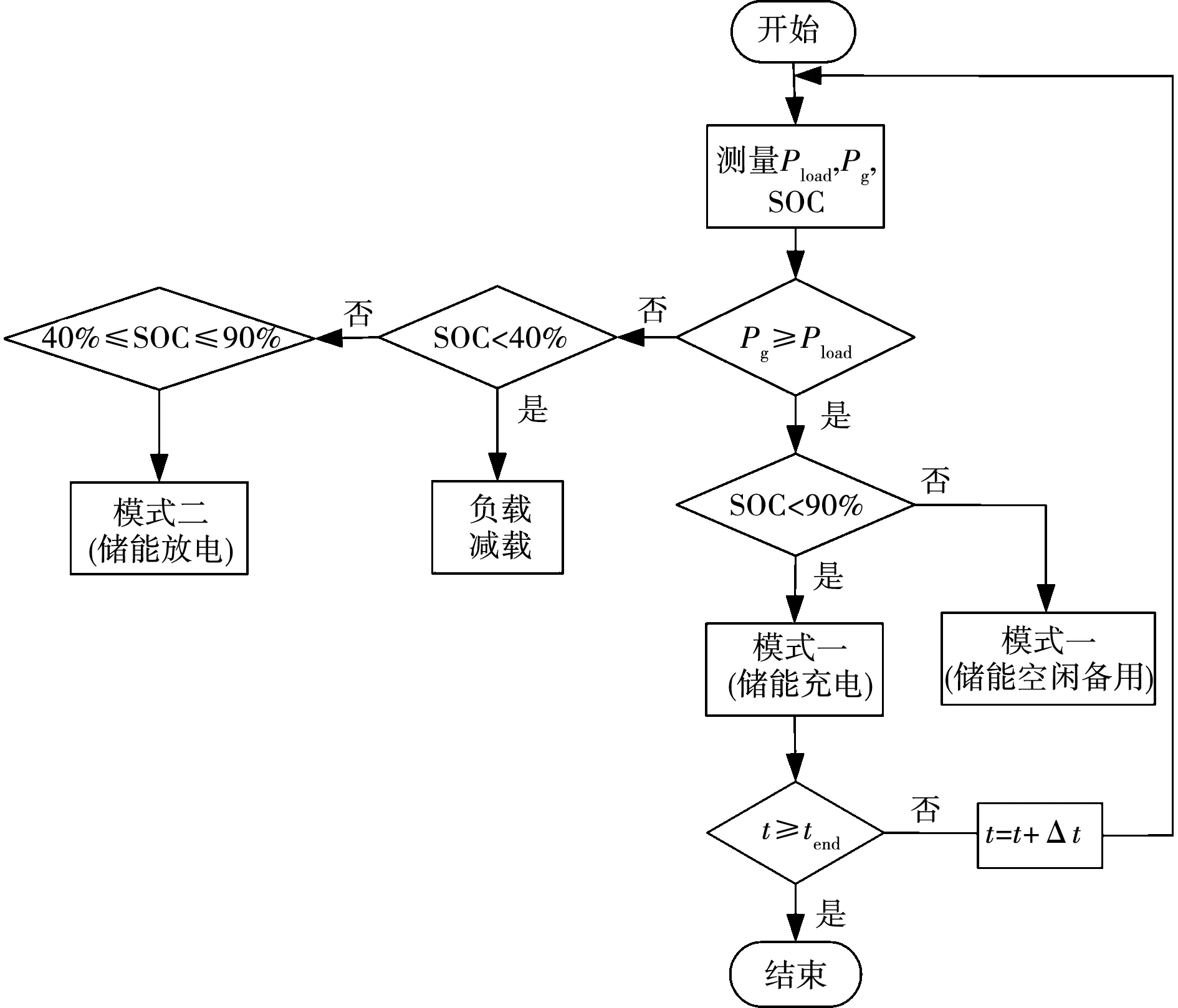
圖9 基于規則的功率控制流程圖Fig.9 Power control flow chart based on rules
3.2.2 采用改進型CSA算法的模型求解
針對船舶長期處于孤島運行方式,在滿足船舶供需能量平衡的基礎上,基于船舶電力系統長期運行經濟性的要求,采用改進型CSA算法對系統的運行成本函數進行優化。
1)算法原理。
CSA是一種基于種群間覓食行為的新型智能優化算法,主要通過從給定的求解空間中的所有可行解中找到滿足約束條件的最優解,其尋優機制簡單和可操作性強,但是該算法在解決復雜、非線性優化問題時容易處于局部最優狀態,且收斂速度較慢。因此針對該算法的缺陷,本文提出一種改進型CSA算法,并將其應用到船舶微電網系統中求解日運行成本最低的問題。
①傳統CSA算法。
情況1:當認知概率AP小于所生成的隨機數ri時,說明個體j并不知曉被跟蹤,則最終個體i會找到個體j隱藏食物的地點;
情況2:當認知概率AP大于所生成的隨機數ri時,說明個體j已知被跟蹤,為了使隱藏食物的地點不被發現,個體j會隨機飛往空間中的其他位置。
上述兩種情況下的位置更新公式如下:
(21)

②基于改進型CSA算法。
為了使得算法的搜索空間更大,同時避免陷入局部最優的情況,本文采用改進型CSA算法,相較于傳統CSA算法做了以下兩點改進:
(a)引入權重系數。
引入權重系數來對個體的位置更新公式進行修正,借此拓寬個體的搜索空間,這樣更有利于搜索到全局最優解,從而降低個體落入局部最優的概率,新的位置更新公式如下:
(22)
(23)
式中:rgbest為當前迭代過程中的最優解;witer為第iter次迭代之后的慣性權重;itermax為最大迭代次數;wmin、wmax分別為慣性權重系數的最小值和最大值。
(b)引入隨機擾動因子。
當檢測到個體位置停止更新時,說明算法可能已經陷入局部最優解(本文設置函數迭代到第150次時,陷入局部最優),此時為了個體能夠跳出當前局部最優,引入隨機擾動因子,使算法可以進入一個更好的尋優空間,從而找到全局最優解。具體計算公式如下:
(24)
改進型CSA算法和傳統CSA算法對比而言,只有每次迭代的慣性權重系數是不一樣的,其他的參數如最大迭代次數itermax,種群數量N,飛行長度f1、認知概率AP以及變量個數pd(指的是個體i和個體j兩個變量)是初始化的時候就已經定義好的,兩者是一樣的。詳細參數見表2所示。
2)算法執行步驟。
綜上所述,本文采用的改進型CSA算法具體執行步驟如下:
①初始化各種可調參數,并針對所研究的問題來完成相應目標函數的定義;
②初始化個體的位置及其記憶位置,且假設個體的初始位置為其記憶位置;
③根據目標函數來計算個體記憶中的最佳位置;
④判斷算法是否陷入局部最優,如果是,則轉到步驟⑤,如果否,將按照式(22)引入權重系數來對位置更新公式進行修正;
⑤陷入局部最優時,按照式(24)引入隨機擾動,使得算法可以跳出當前局部最優的狀態;
⑥重新計算個體的適應度函數,并更新相應的記憶位置和最優位置信息;
⑦重復以上步驟③~⑥,直至達到設置的最大迭代次數時終止循環操作;
⑧輸出個體在更新過程中所搜索到的最優目標值。
4 短時仿真與實驗分析
4.1 仿真參數
本文針對圖1船舶微電網拓撲結構圖在MATLAB/Simulink中搭建了相應的仿真模型,系統各個部分的參數如表1所示。
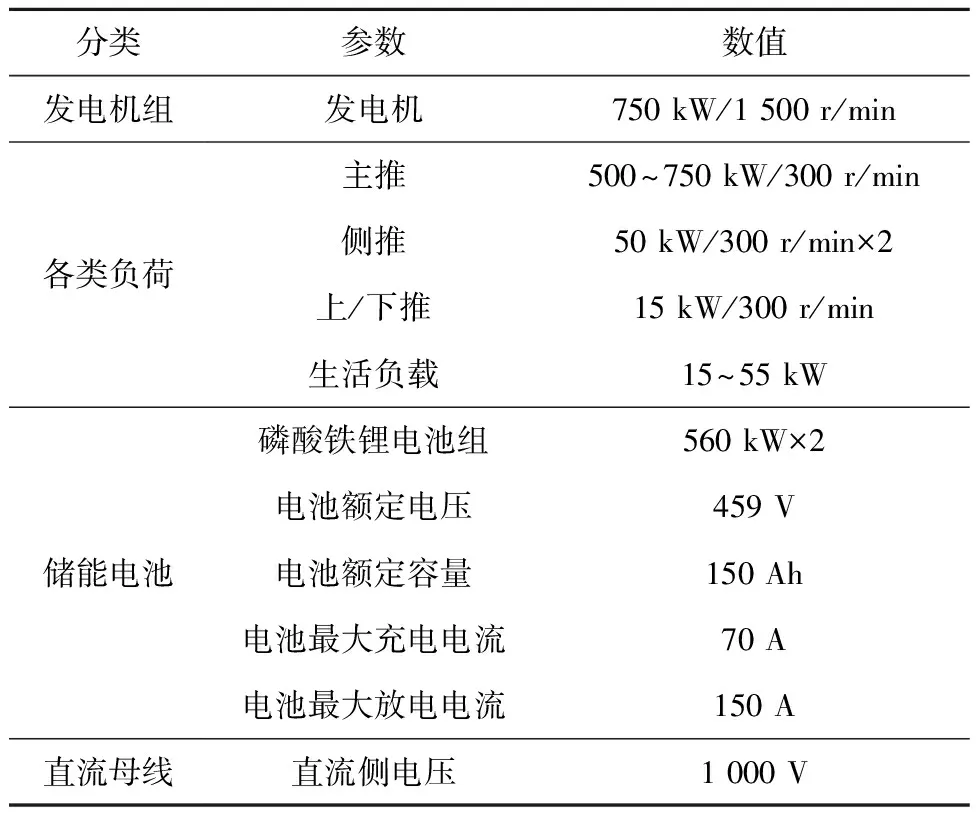
表1 系統仿真模型參數Table 1 Parameters of system simulation model
4.2 仿真結果分析
短時間尺度的仿真時間設置為4.2 s,在該時間尺度下,將發電機推進運行模式和主動減載模式合并為模式一,相關的仿真結果如圖10所示。圖10(i)中的Δ|U|為電壓的偏移率,計算不同曲線的電壓最大偏移量和直流側電壓基準值兩者之間的比值,這樣就可得到不同曲線的電壓偏移率。
圖10(a)~圖10(i)是系統處于不同模式下的仿真結果。在模式一儲能單元處于空閑備用狀態時,其中考慮到圖10(a)模式一在1.8~2.4 s時間段內僅靠發電機的出力無法滿足系統推進負荷和生活負荷的功率需求。通過仿真結果圖10(i)可以看出在不進行任何操作且無儲能的情況下,電壓偏移率為3.5%,在無儲能但進行減載操作之后,電壓的偏移率下降到1.8%,此時若儲能參與系統調節,則電壓偏移率進一步降低到1.4%,最后在儲能參與調節的基礎上并加上基于規則的能量管理策略,電壓偏移率僅為1.2%。
通過以上對比,可以明顯地看出在系統處于短時過負荷工況下,進行負荷減載操作或由儲能提供超出發電機最大出力的那部分功率需求,都能有效地減小直流側電壓的波動,從而提高系統的穩定性。
由上述仿真結果可以看出,系統在模式一和模式二不同工況下都能實現供需功率的平衡和直流側電壓的穩定。
4.3 實驗結果分析
為了驗證所提方法的有效性,本文搭建了如圖11所示的實驗平臺。由于示波器探頭數目有限,因此采用一根探頭分別對不同模式不同工況下的直流側母線電壓波形進行觀察。
由于仿真時系統剛性負荷中推進電機的功率參數較大,實驗時系統剛性負荷的參數和仿真有所區別,具體參數如表2所示。
當系統處于模式一無儲能狀態時,系統運行穩定后的直流側母線電壓實驗波形如圖12(a)所示,通過示波器可以讀出,其電壓偏移率分別為6.6%和9.4%;對比于圖12(b)系統處于模式一有儲能狀態時直流側母線電壓的實驗波形圖可以看出,其電壓偏移率分別由6.6%降為6.4%、9.4%降為6.3%;當系統處于模式二有儲能且采用基于規則的能量管理策略時,系統運行穩定后的直流側母線電壓實驗波形如圖12(c)所示,通過示波器可以讀出,其電壓偏移率進一步下降為4.2%和3.5%。實驗時不同模式不同工況下直流側母線電壓的偏移率對比仿真結果圖中的電壓偏移率存在一定的誤差,但仍然可以驗證本文所采用的能量管理策略能夠有效地改善由于負荷負載驟增或突降所帶來的電能質量問題,與前面章節的仿真分析一致。
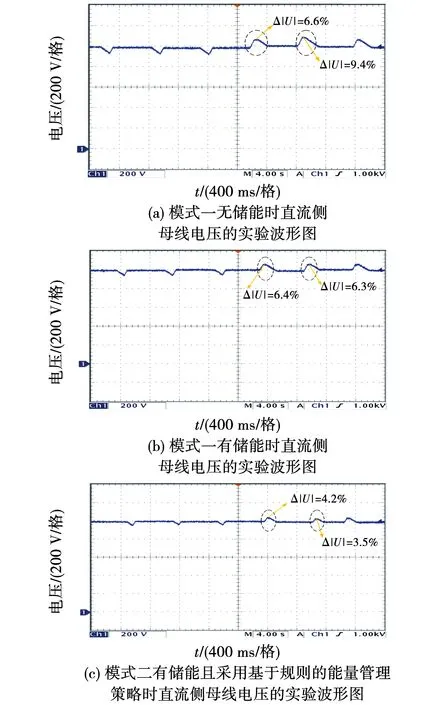
圖12 不同模式不同工況下的直流側母線電壓實驗波形Fig.12 Test waveform of DC side bus voltage under different modes and working conditions
5 長時算例分析
5.1 參數設置
本文配備1臺柴油發電裝置,其額定功率為750 kW,使用價格約為6.0元/L的180CST燃料油;磷酸鐵鋰電池某一品牌的單價在1 400~1 600元/(kW·h),充放電循環次數約為2 480次左右,由于仿真中儲能的容量是根據項目需求,其容量過大,在此只取8個儲能單元,約560 kW。系統的時間間隔為1 h,總時長為24 h進行算例仿真。
在長時間尺度下,本文采用改進型CSA算法對所提的運行成本函數進行求解,并與遺傳算法(genetic algorithm,GA)、粒子群算法(partricle swarm optimization,PSO)以及傳統的CSA算法得到的優化結果進行對比,其中改進型CSA算法的相關參數如表3所示。
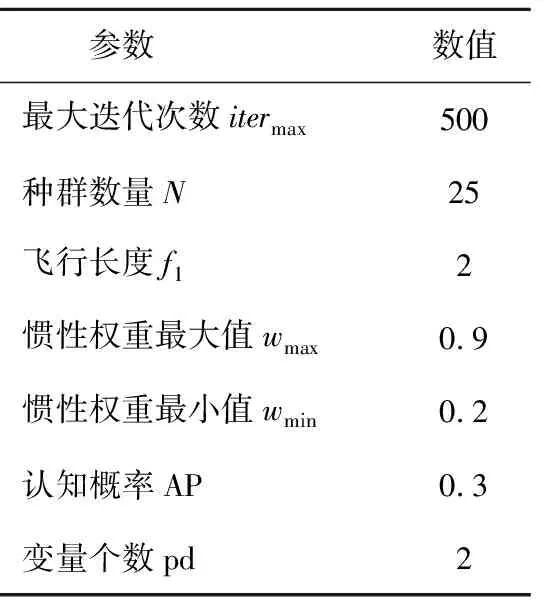
表3 改進型CSA算法參數Table 3 Parameters of improved crow search algorithm
5.2 算例結果分析
采用不同的優化算法進行優化后各部分運行成本對比見表4所示。
由表4的運行成本對比可以看出,采用改進型CSA算法無論是收斂速度還是尋優能力均優于其他的對比算法,其中船舶微網的總運行成本相較于GA算法、PSO算法和CSA算法依次下降了21.3%、17.2%和4.4%,提高了船舶運行的經濟性。
由圖13(c)可以看出優化之后的總負荷需求在8:00-16:00之間需求減少,在0:00-7:00之間需求增加。可見考慮可中斷負荷和可時移負荷后能減小負荷峰谷差,使得負荷曲線更加平滑,從而起到削峰填谷的作用,此外在16:00-24:00之間發電機的出力有所下降,使得系統更加清潔環保。
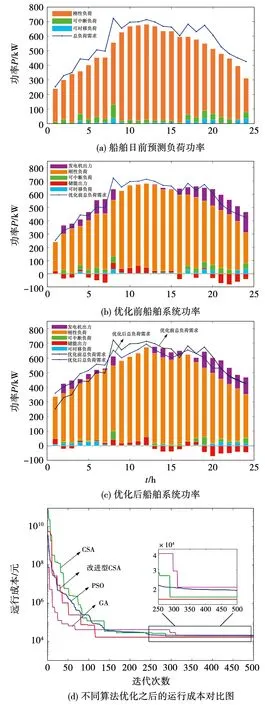
圖13 船舶長期仿真結果圖Fig.13 Long term simulation results of ship
6 結 論
本文對船舶微電網綜合電力系統不同時間尺度優化調度進行了研究,提出了一種多時間尺度下的分層控制綜合能量管理策略,構建了基于短期負荷波動下的微網仿真模型和基于長期運行下的系統運行成本優化模型,具體結論如下:
1)通過對比系統在不同模式以及不同運行工況下的仿真結果:在同樣配備儲能系統的基礎上采用基于規則的能量管理策略,使得系統在不同運行模式切換時電壓偏移率最大僅為0.4%,有效地改善了電能質量;
2)長期運行下提出改進型CSA算法對系統的燃料和儲能電池總運行成本進行優化,通過不同算例的對比優化結果:該改進算法相比于其他算法不僅可以使得負荷曲線更加平滑,起到削峰填谷的作用,而且具有一定的經濟效益。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年2期)2022-03-29 01:12:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
裝備制造技術(2019年12期)2019-12-25 03:06:46
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45