基于機載LiDAR技術的城市地下排水管道泄露點檢測方法
2023-11-02 11:47:16修明軍丁鴿孫傲
城市勘測 2023年5期
修明軍,丁鴿,孫傲
(濟南市勘察測繪研究院,山東 濟南 50000)
0 引 言
在城市化迅速發展的進程下,城市地下排水工程的建設復雜性不斷增加,城市地下排水管道縱橫交錯,地下排水管道覆土后隱蔽性較高,地表數據復雜,管道之間的聯系較為密切,系統性較強。在不同的地段,管道的動態化程度不同,為此,正確檢測城市地下排水管道泄漏點對于城市地下安全具有至關重要的作用。目前的城市地下排水管道泄漏點檢測方法多采取遙感技術獲取水利基本信息,針對點云圖像匹配泄漏點定位數據,進一步提升定點檢測的有效性。
文獻[1]基于深度學習研究排水管道的特征圖像,同時對圖像數據進行模型訓練,精準程度較高。文獻[2]基于卷積神經網絡構建自動檢測排水管道缺陷,有效識別管道類型,科學性較高。但以上方法難以對地表數據進行有效分析,對于覆土后某一程度的排水管泄漏點定位檢測速度過慢,無法及時獲取泄漏點信息,進而導致排水管道泄漏處理不及時,造成較大的施工安全隱患,為此,針對上述問題,本文提出一種新式基于機載LiDAR技術的城市地下排水管道泄露點檢測方法對以上問題進行分析與解決。
本文加強對地下排水管道位置數據信息的處理,通過LiDAR技術提取多項技術參數,有效獲取精準的泄漏點數據特征,通過數據位置信息劃分確定檢測位置,及時檢測泄漏點位置,達到高效檢測的目的。
1 城市地下排水管道數據提取
1.1 水流動態點監測信息提取
由于機載LiDAR技術需要多系統共同運轉,本文強化系統裝置,設置激光掃描儀集中收集城市地表數據信息,利用發射的激光雷達信號檢驗發射點與目標的距離信息,選取匹配度較高的信號接收系統將激光采樣后的數據傳回至數據提取中心內部[3-4]。水流動態點監測信息提取過程如圖1所示:
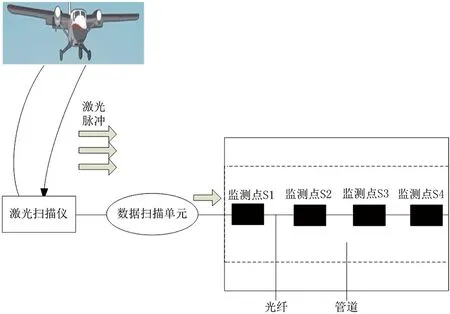
圖1 水流動態點監測信息提取過程
獲取掃描儀中的地下排水管道水流動態點監測信息,記錄瞬時參數,將LiDAR采集的地下排水管道三維坐標、地理影像以及回波響應時長數據收錄至數據存儲中心。匹配不同屬性的點云數據等待系統數據提取處理[5-6]。
1.2 排水管道泄漏點參數提取
在地下排水管道水流速度較快的地區加固管道壁,記錄加固的厚度。設置激光掃描點,當掃描的目標被激光射中后,標記該點位置,并對比該點與其他位置的管道壁厚度,若該厚度數據大于周邊區域管道厚度數據,則將該標記點信息提取至數據處理空間中等待數據濾波操作,并設置數據濾波方程式如下所示:
(1)
式中,s為數據濾波指標數值;K表示為管道厚度數據;o表示為位置標記點信息;t表示為管道壁加固程度參數;△t表示為相應掃描時長數值;V表示為數據處理空間存儲容量,由此獲取濾波后的數據,并根據濾波的數據調節激光脈沖的信號綁定模式,當被測目標的激光發生反射時,標記反射位置,將該區域判定為標準管道位置記錄區域,獲取真實度較高的排水管道泄漏點參數[7-8]。
1.3 數據標記參數提取
篩選檢測區域范圍內的排水管道數據,確定其基本結構,集中管理結構類似的管道信息,按相關度分類提取的地下排水管道泄漏點數據,構建泄漏點信息標記體系,進而找出隱蔽性較強的泄漏點,設置數據標記提取公式:
(2)
式中,Z表示為數據標記提取參數;P表示排水管道復雜程度參數;△t·α為排水管道泄漏的時間區間與結構的乘積。在提取數據標記后,分析不同地理位置對泄漏點數據提取的影響,獲取清晰的位置圖像信息,從而實現城市地下排水管道數據的初步提取操作[9]。
2 基于機載LiDAR技術的點云數據分類
2.1 地下排水管道位置數據劃分
根據提取的地下排水管道位置數據將管道分為泄漏與不泄漏兩種狀況,結合機載LiDAR技術手動添加分類標簽數據,按照濾波算法的計算法則將地下排水管道的泄漏狀態參數記錄下來,設置泄漏標準值,當記錄的數據超出該標準值,則將該點判定為目標泄漏點,反之,將其判定為非泄漏點[10]。地下排水管道位置數據劃分流程如圖2所示:
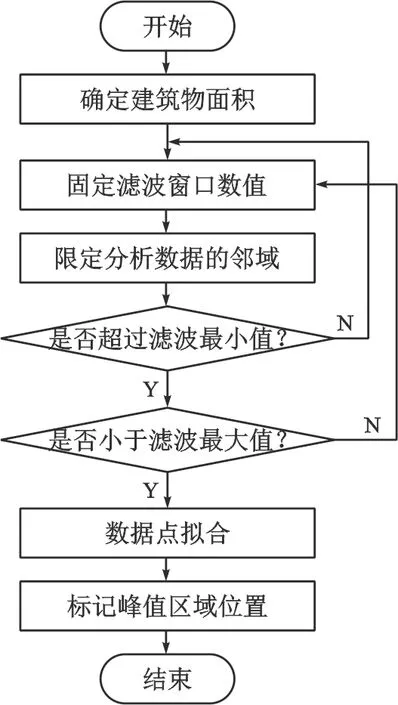
圖2 地下排水管道位置數據劃分流程
根據圖2可知,確定城市研究區域的建筑物面積,固定濾波窗口數值,限定分析數據的鄰域,設置最小值替代濾波通道內的腐蝕系數,同時設置最大值替代濾波通道內的膨脹系數[11-12]。對比城市地標建筑物的高程,將城市地表等分為小塊區域,根據迭代先行最小二乘法確定劃分區域內的全部數據點擬合數值,標記峰值區域位置,確定管道泄漏點擬合權重,構建泄漏點數據劃分公式,如公式(3)所示:
(3)
式中,J為泄漏點數據劃分指標參數;Cb為泄漏點擬合權重數值;A為數據變化峰值區域數值;Q為相關濾波通道內部系數代表值。
若獲取的劃分數值在0至1之間,則該區域為管道泄漏區域,若數值為0,則該區域為非泄漏區域。將劃分后的數據與實際管道狀態反饋信息進行對比,地下排水管道泄漏點位置反饋的信息完整度較低,擬合權重數值較小。
2.2 基于波速計算的數據分類
利用負壓波測量該位置管道內流體狀況,當泄漏產生時,該位置的管道兩端將生成壓力脈沖信號,泄漏口的壓強瞬間增大。根據管道負壓波波速數據判斷管道的泄漏程度,構建波速計算公式:
N=e2×(S-0.8e1/2+0.2e1/4d)+I
(4)
其中,N為計算的波速數值;S為排水管道泄露程度指標;d為排水管道泄露時長;I為壓力脈沖信號參數。
由于部分區域的管道分布較為密集,在進行泄漏點數據分類判斷的同時需排除管道內流體類型對分類結果的影響。分析管道隱含層的流體狀態,完善泄漏分類數據空間,達到城市地下排水管道泄漏數據精準分類的目的[13-14]。
3 基于數據掃描的泄漏點位置檢測
3.1 數據精密分析
按照分類后的地下排水管道泄漏點數據精密分析數據點位置及所處空間狀態。根據掃描裝置獲取的城市正射影像圖判斷城市區域面積與地下排水管道泄漏區域的關系指標。在區域判斷的過程中避免高程過大的建筑物對數據收集的影響,針對不同的區域地形信息合理規劃管道圖像獲取路線,減少檢測的復雜程度[15]。
3.2 數據錄入
在實現數據精密分析后,得到圖像平斷面如圖3所示:
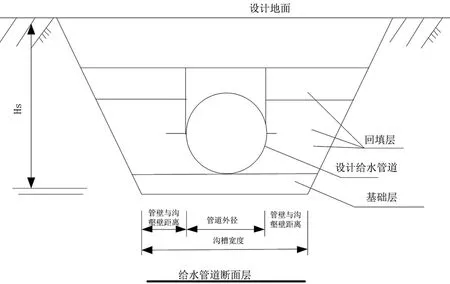
圖3 圖像平斷面
根據圖3提取圖像平斷面信息,利用機載LiDAR技術獲得管道數據檢測選線平臺,精準提取管道線路內部的特征平斷面參數,記錄平斷面高度以及測量的距離數據,通過預測高程的方式判斷選定的選線平臺是否合理。考慮因城市地形差距過大的數據信息的影響,對比不同的選線方案實現良好的平斷面提取路線的選擇,構建平面坐標處理模型,將提取的平斷面數據錄入該模型中,設置數據錄入公式:
(5)
式中,L為數據錄入準則;β為測量得到的距離數據;G為選線平臺判斷參數;q為最佳提取路線指標。
3.3 泄漏點位置檢測
收集完成錄入的信息至數據檢測中心,進行下一步驟的地下排水管道泄漏點數據檢測操作。采集管道壓力信號,將信號數據進行小波變換處理,得到管道內部負壓波傳導時間參數,捕捉泄漏點與非泄漏點的時間差信息,將其代入泄漏點位置檢測公式中:
(6)
其中,M為檢測的泄漏點位置參數;y為該點縱坐標,xμ為該點橫坐標參數。由此獲取相應的位置信息檢測結果數據,判斷檢測的結果數據,標記泄漏點位置的縱坐標數據為原始數據,利用LiDAR技術將淺層雷達圖轉換成深層剖面圖,實現泄漏點檢測,泄漏點檢測結果如圖4所示:
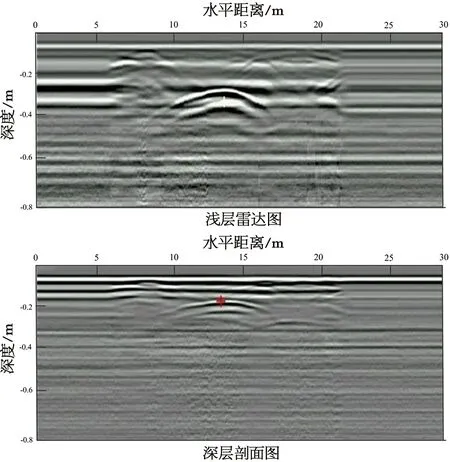
圖4 泄漏點檢測結果
根據圖4的泄漏點檢測結果轉化數據濾波頻率參數,構建低頻信號收錄系統,當檢測的位置出現泄漏點信息時,該區域將發射壓力信號至信號收錄系統中,此時數據檢測系統將開啟定位模式,發射激光信號至泄漏點位置,同時將泄漏點數據轉化為可編碼的程序信息,利用機載LiDAR技術增強數據的檢測速率,檢測系統內部網絡得到延展將自動創建數據檢測訓練板塊,泄漏點數據被收錄至訓練板塊中進行樣本訓練操作,同時輸入特征值向量,判斷檢測的泄漏點數據是否為真實數值,提升泄漏點檢測的可靠性,由此實現城市地下排水管道泄漏點的數據檢測。
4 實例研究
為了驗證本文提出的基于機載LiDAR技術的城市地下排水管道泄露點檢測方法的實際應用效果,選用某城區的地下排水管道作為實驗對象,排水管道為T型管道,管道結構如圖5所示:
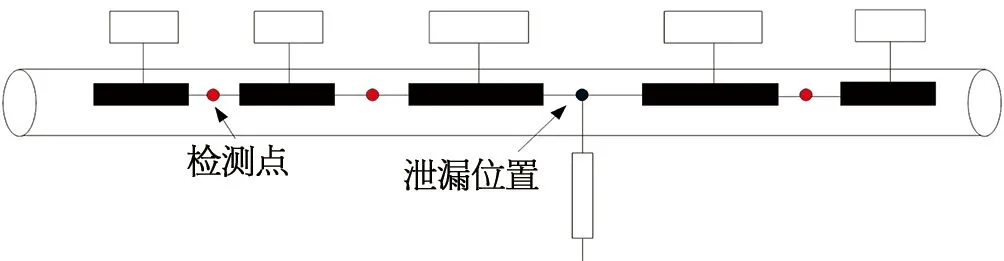
圖5 管道結構
觀察圖5可知,管道的粗糙度為0.05 mm,總長度為 1 000 m,需要 30 s才能完成水流的運輸,在水流運輸到第 10 s時,出現了泄露,選用機載LiDAR技術檢測泄漏點,得到的實驗結果如圖6所示:
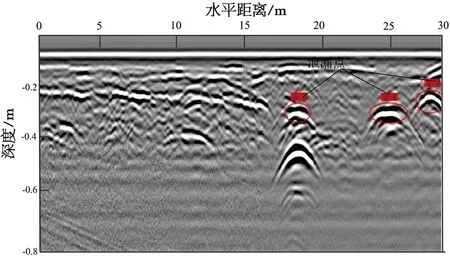
圖6 機載LiDAR技術泄漏點檢測結果
根據圖6可知,本文提出的泄漏點檢測方法通過機載LiDAR得到地下排水管道的雷達檢測圖,雷達檢測圖顯示共有3個泄漏點,處于地下0.2~0.3的深度之間,泄露位置在雷達圖上清晰可見,由此證明本文提出的檢測方法能夠準確地檢測出泄漏點位置。
為進一步驗證本文提出的檢測方法實際效果,同時選用基于深度學習的排水管道泄漏點檢測方法和基于卷積神經網絡的排水管道泄漏點檢測方法與本文方法進行實驗對比,對不同深度的故障點進行檢測,比較三種檢測方法的檢測時間,得到的實驗結果如圖7所示:
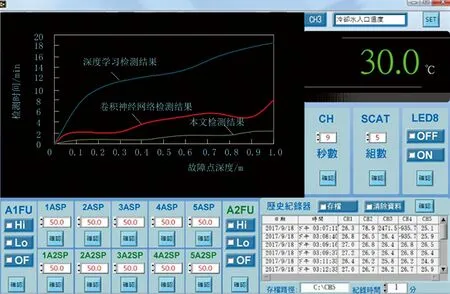
圖7 檢測時間實驗結果
觀察圖7可知,隨著故障點所處深度不斷增加,三種檢測方法花費的檢測時間也不斷增加,但是本文提出的檢測方法檢測速度更快,檢測時間更短,檢測時間始終低于 2 min,能夠快速識別到泄漏點位置,啟動安全保護措施,而傳統的基于卷積神經網絡的檢測方法和深度學習檢測時間在最大可以達到 8 min和 18 min,很容易造成不可挽回的地下水泄漏事故。造成這種現象的原因是通過機載LiDAR技術對泄漏點進行檢測,在檢測過程中僅需要確定特征樣本,分析輸入向量,就能夠確定泄漏點位置,不需要再進一步檢測未知輸入參量,而傳統的檢測方法在檢測過程中需要深入分析輸入向量,通過展開學習判斷檢測位置,檢測耗時更長,造成的安全事故更嚴重。
5 結 論
本文基于機載LiDAR技術檢測城市地下排水管道泄露點,得到的結論如下所示:
(1)根據機載LiDAR技術獲取所需的城市地理數據,同時生成遙感圖像,坐標化處理收集的地理圖像信息,能夠有效調整整體數據的轉化狀況,簡便數據操作過程,提高操作效率。
(2)本文利用穿透性較強的數據掃描裝置集中管理城市地表數據信息,結合城市水利設施建設狀況信息進一步增強排水管道位置信息的提取力度,避免管道非泄漏點對整體檢測的干擾,構建三維場景模型處理檢測的位置信息,實現精準定位操作。
(3)本文檢測的泄漏點數據具有精準度高、檢測所需時間短的優點,在進行檢測的同時充分考慮城市地形坡度以及植被覆蓋率的影響,減少數據點的無效勘測,匹配點云濾波技術提高檢測自動化處理能力。
本文雖能夠在發現地下排水管道泄漏的同時及時檢測到泄露點位置,但檢測方案有待進一步地挖掘,在管理排水管道數據時應強化篩選處理,將該技術廣泛應用于城市地下排水管道泄漏點的檢測中。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中外會展(2014年4期)2014-11-27 07:46:46
民生周刊(2012年10期)2012-10-14 09:06:46