交變電磁消旋過程中徑向共線構型編隊的附加力策略研究
2023-09-18 04:16:24廖潛石永康黃少華陳金山
中國空間科學技術 2023年4期
關鍵詞:磁場
廖潛,石永康,黃少華,陳金山
新疆大學 機械工程學院,烏魯木齊 830017
1 引言
近五年針對空間碎片不斷增多導致近地軌道等空間軌道資源日漸有限的問題[1-2],主要的可行方法:先通過消旋處理,后進行捕捉、移除等操作。其中消旋是關鍵,根據是否直接接觸消旋目標分為接觸式和非接觸式消旋技術[3-4]。但空間碎片普遍存在較大殘余角動量,現有的接觸式消旋技術需要極高的控制精度,并且技術實現時容易導致接觸結構的損壞,增加二次碎片產生的可能性,而且會對自身消旋裝置所在的平臺造成沖擊。因為非接觸式消旋技術不存在因接觸而產生碎片二次分解問題,對服務星的位姿精度要求較低,有效工作范圍較大,但也存在靜電力消旋對目標形狀要求高、激光消旋需要解決目標定位等問題。在理論上,電磁消旋方法易于實現,其工程實用性較高。
文獻[5-6]首次提出在衛星表面感生渦流消除旋轉的方法,但由于當時技術限制,研究一度停滯。隨著碎片清除需求越發迫切,電磁消旋技術再次成為研究熱點,并隨著第二代高溫超導技術的進步,解決了電磁消旋技術中力矩較小的問題,真正具備了工程實用性。文獻[7-8]采用高溫超導線圈產生超強磁場研究渦流制動機理及相互作用力/力矩模型,開展仿真實例分析,并設計了地面實驗平臺進行驗證。文獻[9]對超導式渦流消旋技術的可行性進行了定性分析,對典型的高、低速旋轉目標、以及復合旋轉目標的消旋進行動力學仿真研究,表明超導式渦流消旋具有足夠強大的制動能力,能有效消除目標的高速旋轉或復合旋轉運動。
在電磁消旋機理不斷完善的同時,人們還提出了功能多樣化的消旋方案,文獻[10-11]提出利用雙星編隊進行消旋的方法,分析了衛星的星間電磁作用和目標與衛星系統之間的電磁相互作用,通過仿真結果說明使用雙星電磁編隊消旋具備可行性。文獻[12]提出一種消旋并同時識別目標的全慣性系數的消旋方案,并在一個空氣軸承平臺上進行實驗,驗證了該方法的有效性。
但現有的大部分電磁消旋技術研究及方案設計中并未將電磁衛星與旋轉目標視為一個整體,并不考慮消旋過程中的磁場附加力問題,仍然依賴于服務衛星的推力裝置等外部作用力長時間地維持相對位置,在研究過程中上述問題極大地限制電磁消旋技術的應用進程。為了突破電磁消旋技術應用限制,本文探索以單個線圈的電磁衛星模擬非勻強磁場,以球狀失效衛星為目標星,在徑向構型條件下提出一種利用電磁附加力的電磁消旋策略,將消旋過程中電流-磁場-作用力-相對位置的關系聯系在一起,初步形成消旋編隊的概念,并通過數值仿真進行驗證,設計電磁衛星對目標消旋的同時,能在一定程度上利用磁場附加力,減少推進劑的消耗。
2 電磁消旋編隊模型
2.1 服務星和目標星模型
為了方便研究,將服務星模型簡化為電磁線圈,通過控制線圈電流進而控制線圈產生的磁感應強度大小及方向,精確計算線圈磁感應強度公式如下:
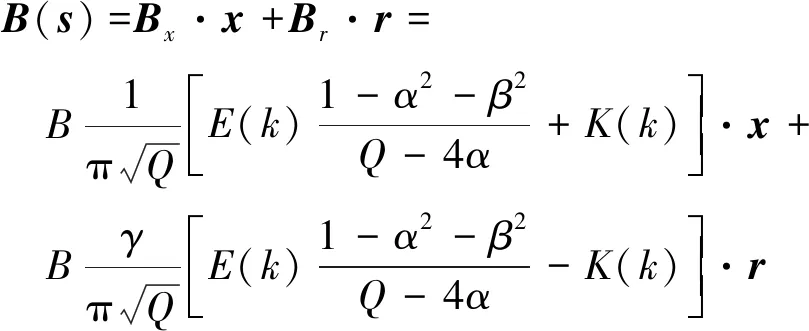
(1)
式中:Bx,Br分別為B(s)沿線圈中心軸向和徑向的分量;x,r分別為線圈中心軸線方向及其垂線方向上的單位矢量;α=r/R,β=x/R,γ=x/r,Q=(1+α)2+β2,k=(4α/Q)1/2;K(k)為第一類完全橢圓積分;E(k)是第二類完全橢圓積分;k為模;R為線圈半徑;B=μ0Ni/2R為線圈中心點處的磁感應強度,μ0為真空磁導率;N為線圈匝數,i是線圈電流。
失效衛星大多為球狀、柱狀,為了便于應用磁張量理論,根據激勵磁感應強度推導出目標星的近似渦流轉矩模型,將目標星模型假設為鋁制薄壁球殼狀失效衛星,在分析過程中忽略衛星其他結構對渦流消旋的影響,只計算衛星表面的渦流消旋作用。設球殼半徑為Rt,質心與球心重合,以質心為原點建立球坐標系,球殼厚度為e,球殼材料的電導率為σ,并且球殼繞y軸以角速度ω勻速旋轉,如圖1所示。
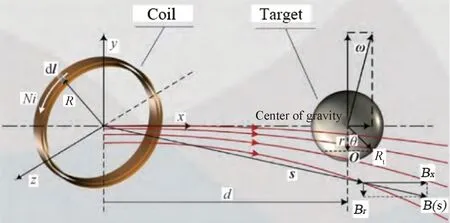
圖1 服務星-目標星電磁消旋示意
2.2 電磁力/力矩模型
在服務星主動激發形成的非勻強磁場中,旋轉運動的目標星感生的消旋力和力矩[8,13]為:
Fd=μeffMΛ(ω×BGt)
(2)
Td=[M(ω×BGt)]×BGt
(3)
式中:Fd為消旋力;Td為消旋力矩;BGt為碎片重心處的磁感應強度;Λ為磁場的雅可比矩陣;M為旋轉目標的電磁張量;ω為旋轉目標的角速度,μeff為非勻強磁場的修正系數,
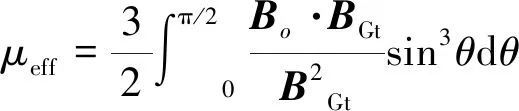
(4)

(5)
(6)
式中:θ為球殼內的方位角;Bo為目標星體內點o處的磁感應強度;x為線圈與目標的相對距離;mc為線圈的磁矩。
根據文獻[14]考慮在感生渦流場中旋轉目標與源磁場相互作用會產生影響相對位置的磁場附加力,主要有一階渦流導致的側向力、二階渦流導致的排斥力。
(7)

(8)

(9)
式中:Fc為側向力;Fp為排斥力;Bd為線圈磁感應強度軸向分量;Bd1為渦流磁感應強度。消旋過程中力的示意如圖2所示,其中i1為一階渦流,i2為二階渦流。
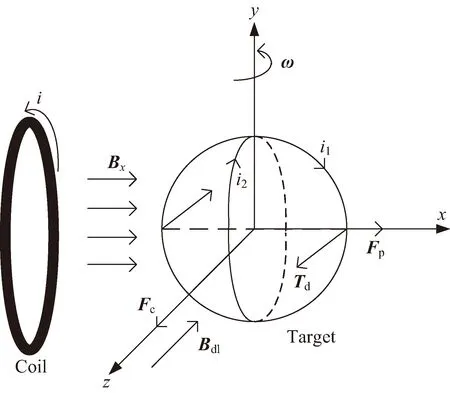
圖2 消旋過程中力的示意
2.3 動力學方程
假設沒有其他攝動作用,將兩星之間的電磁渦流消旋作用作為編隊間的內力作用,那么服務星、目標星的攝動加速度為:
fk=Fk/mk,k=0,1
(10)
式中:下標k中的0、1分別表示服務星、目標星;F為攝動力;f為攝動加速度;m為質量。
通過控制衛星電磁線圈的輸出,進而產生相應的磁場,使得服務星能夠主動控制與目標星之間的電磁渦流消旋作用,那么可認為其過程中產生的渦流力、側向力以及排斥力的大小、方向均受到控制,那么聯立式(2)(7)(8),轉換到同一坐標系下,可以得到對服務星的攝動力為:
(11)
且由編隊間的內力作用可知:
F0=-F1
(12)
那么根據近圓軌道假設條件下的近距離相對運動動力學方程,忽略干擾項,可建立關于服務星與目標星的Hill方程:
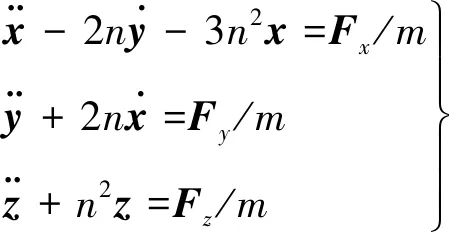
(13)
2.4 徑向分布編隊構型下的消旋策略
將服務星與目標星設計為徑向分布的編隊構型,根據文獻[15]可知徑向分布的靜態電磁編隊只受磁矩的徑向作用。通過服務星、目標星的軌道設計可實現將兩星相對位置的控制轉換為相對距離的控制。盡管目標星選擇為對稱均勻分布的球狀目標,但相對姿態的影響仍然存在,主要體現在反作用的消旋力矩對服務星的作用,造成服務星的角速度增加。
在軌道設計中考慮仿真起始時刻下軌道要素在J2攝動作用下的變化率,那么仿真起始日期的平均軌道六要素等于初始軌道六要素加仿真起始時刻處軌道要素在J2攝動作用下的變化量。
θ服務星=θ目標星+d/a目標星
式中:GM為地心引力常數;a0為半長軸;e0為偏心率;i0為軌道傾角;Ω為升交點赤經;ω為近地點幅角;θ為真近點角;J2為地球形狀攝動;Ro為地球半徑;δΩ為升交點赤經變化率;δω為近地點幅角變化率;δωorb為目標星軌道運行角速度。
使用Simulink軟件搭建關于服務星與目標星的電磁渦流消旋編隊系統模型,其中兩星之間的電磁消旋作用為內力作用,由兩星的絕對位置計算相對位置,再根據維持狀態所需的電磁力計算出所需的磁感應強度。在徑向構型條件下,當存在相對距離跟蹤指令x*時,根據兩星的相對距離誤差(xe=x*-x)反饋計算輸出:
在電磁消旋編隊中需要考慮到電磁衛星的角動量飽和與卸載問題,電磁衛星采用反作用飛輪系統。以I表示目標星的轉動慣量,渦流力矩作用下目標星的姿態動力學方程為:

綜上,該消旋策略建立在服務星與目標星形成徑向分布共線構型條件下,將兩星相對位置轉換成相對距離,探索通過距離變化引起的磁感應強度變化來彌補目標角速度的降低,使上一時刻的角速度與磁感應強度的向量積盡可能等于下一時刻的角速度與磁感應強度的向量積,從而使得消旋速率盡可能呈斜直線下降,而距離變化范圍通過交變電磁場實現減小。其仿真流程如圖3所示。
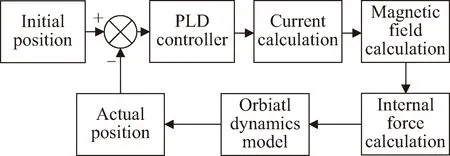
圖3 仿真控制方案
3 消旋案例仿真研究
采用上述計算公式,設置的仿真參數如表1所示。
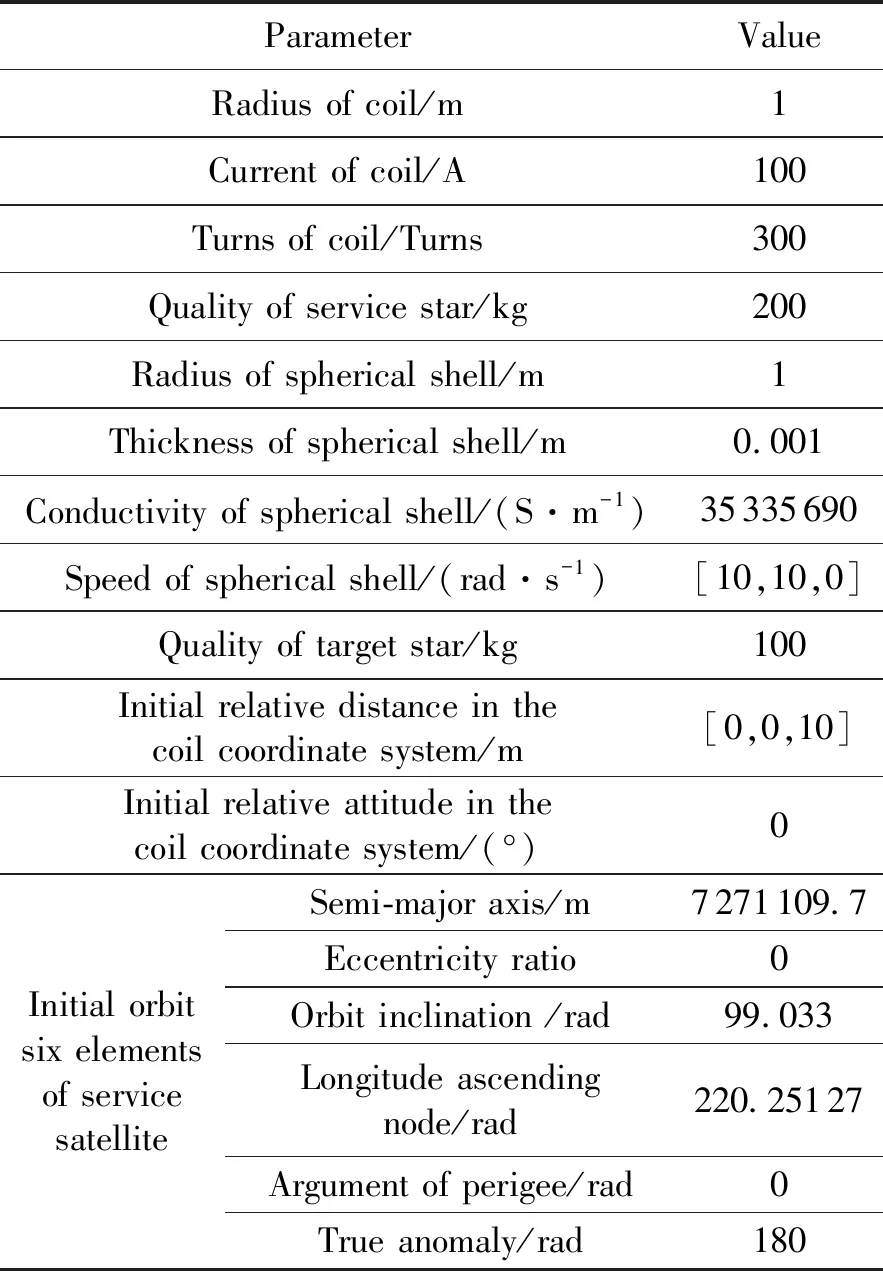
表1 仿真條件
使用上述模型研究在消旋過程中利用非勻強交變磁場實現無推進劑消旋任務的可行性,設當相對距離為5m時,整個電磁消旋編隊系統失效,且不考慮輸出信號的時滯問題,根據式(6)計算10m處磁場有效因子μeff=0.994547。
3.1 磁場附加力對消旋的影響
如圖4所示,在形成徑向共線構型編隊的基礎上,在整個電磁消旋系統模型中考慮磁場附加力,會發現附加力使兩星相對距離變化更加劇烈,而圖5說明磁場附加力對目標沒有直接的消旋作用。易知,當目標星與服務星的相對位置發生變化時會造成旋轉目標所受磁感應強度的變化,從而間接影響電磁衛星對消旋目標的電磁消旋作用。
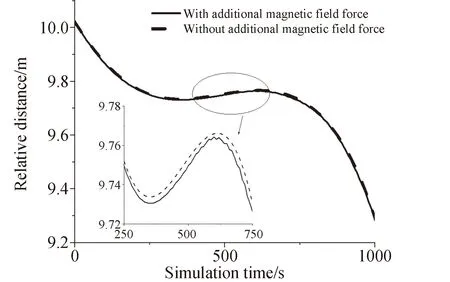
圖4 磁場附加力對相對距離的影響
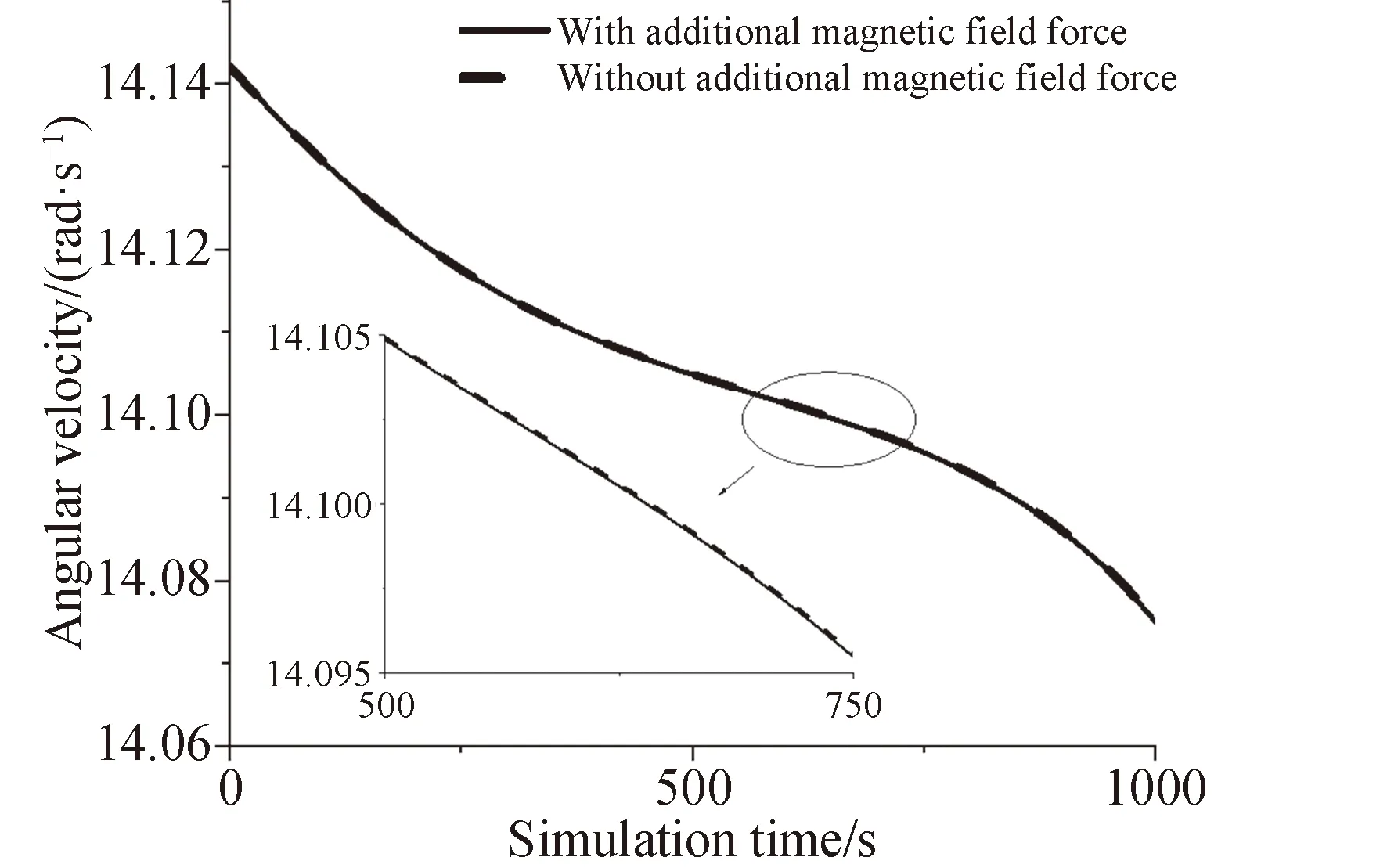
圖5 磁場附加力對角速度的影響
3.2 磁場源對消旋的影響
根據式(9),可知通過控制電磁線圈的輸出電流可控制磁場附加力大小、方向,那么有必要研究應用交變電流形式下的非勻強磁場在電磁消旋過程中制動能力和保持相對位置的影響因素,在形成徑向共線構型編隊的基礎上,以正弦波等多種常見波形的交流電磁場為例,與恒定電磁場在保持兩星相對距離以及消旋速率方面上進行比較。其中恒定電流與交變電流均采用表1中的300匝、100A的線圈、電流參數,在交變電流中選取0.016Hz作為交變頻率進行仿真,結果如圖6~8所示。
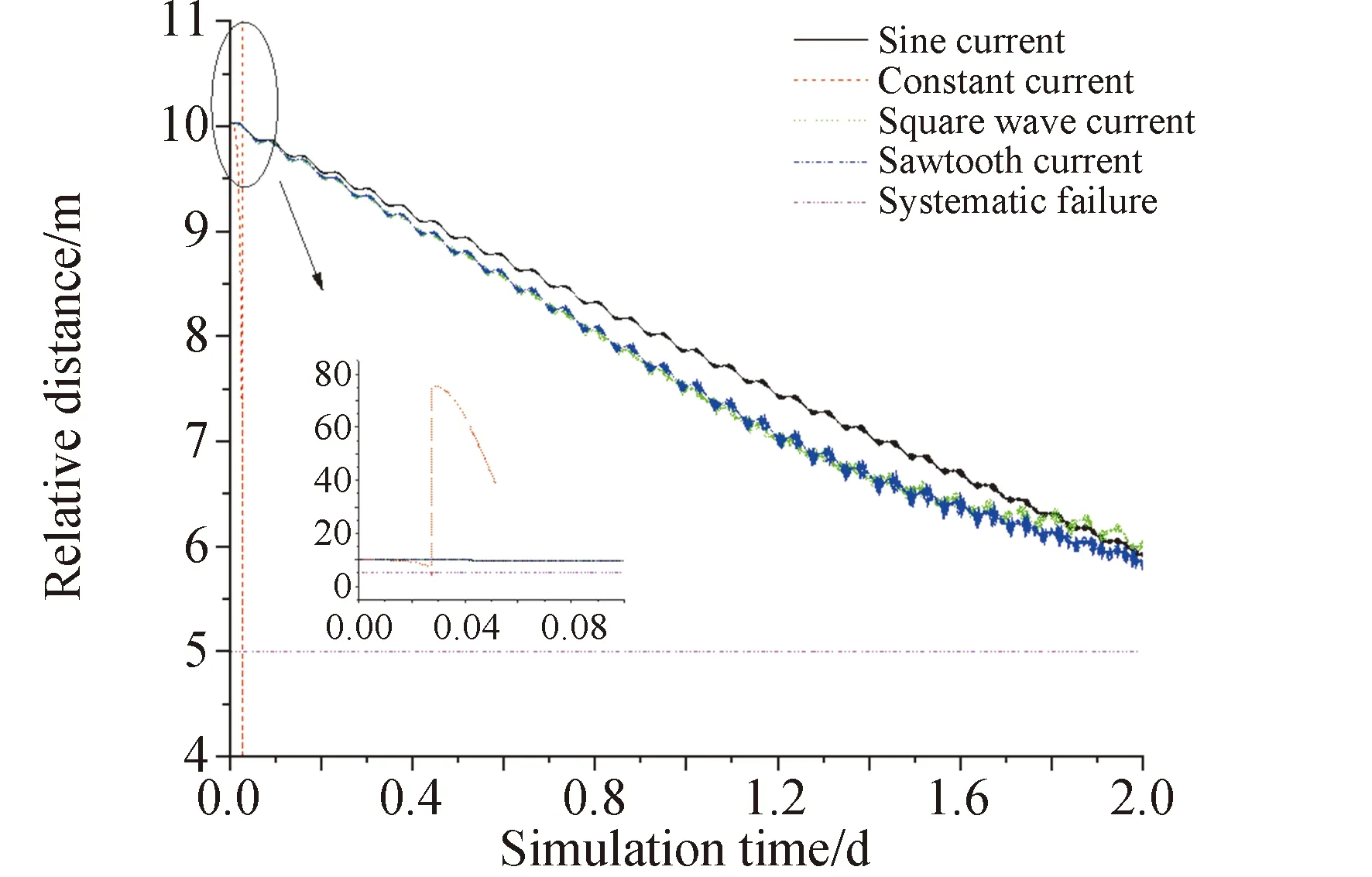
圖6 磁場源對相對距離的影響
由圖6可知,交變電磁場在保持執行長期消旋任務能力上有明顯優勢。而圖7可看到在消旋速率方面,恒定電流和方波電流作用下有部分重合的消旋速率曲線,這說明旋轉目標在這段時間內受到同等制動作用,但恒定電流作用下目標角速度迅速降低,這說明在電磁場的持續作用下消旋目標與電磁衛星持續靠近,導致旋轉目標所受磁場增大,消旋速率加快。而在交變電磁場中,旋轉目標與服務星的相對距離變化較小,不用服務星主動消耗推進劑維持相對位置也能保持較長時間的持續消旋。但不難看出,固定變化形式的電磁場不滿足任務需要,最終會因為目標的旋轉速度降低,導致電磁消旋編隊系統的內力作用減弱,直至整個系統最終失效。圖8是以恒定電流與方波信號的交變電流為例,仿真得到的消旋過程中的渦流力、側向力、排斥力的變化。
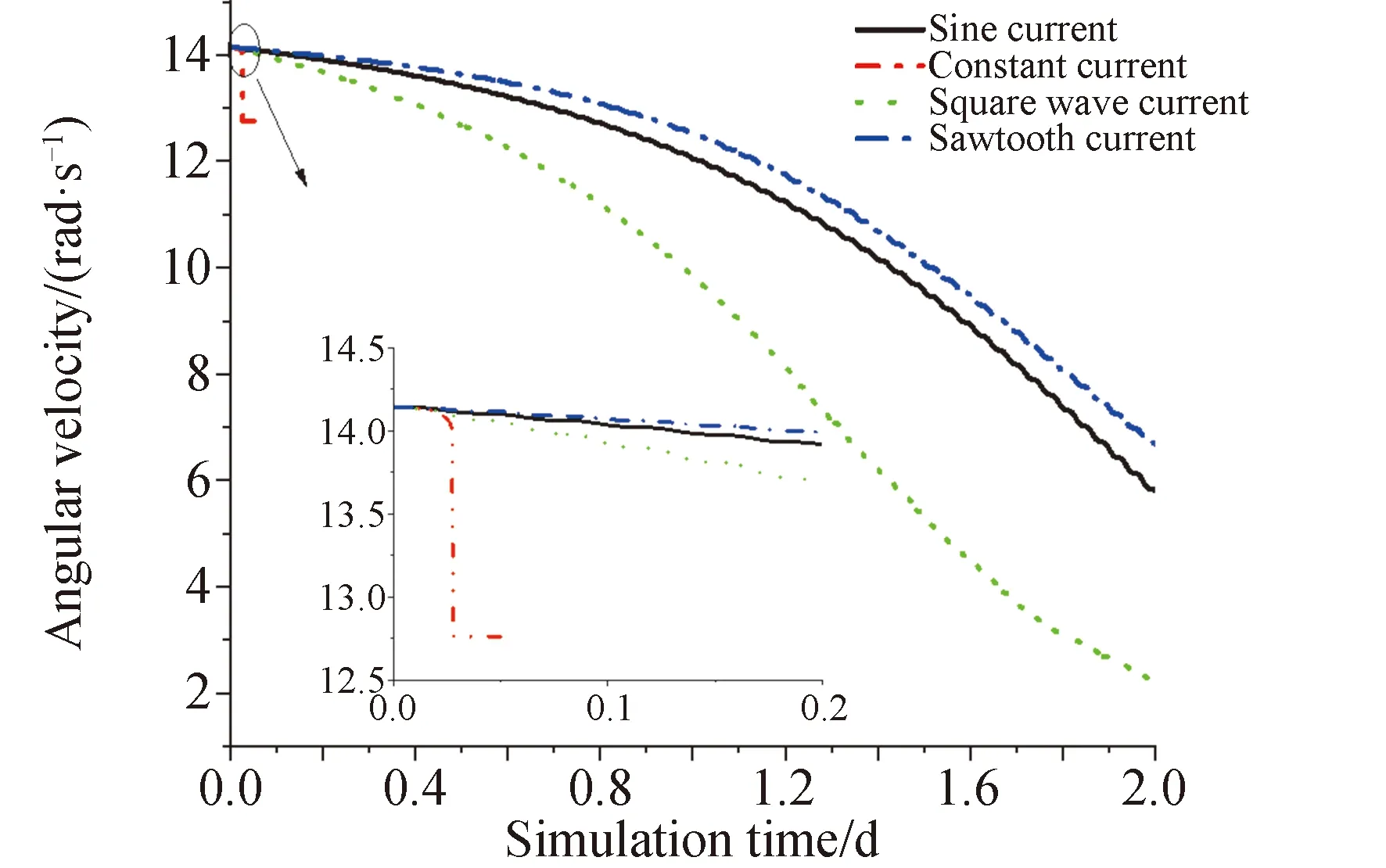
圖7 磁場源對角速度的影響
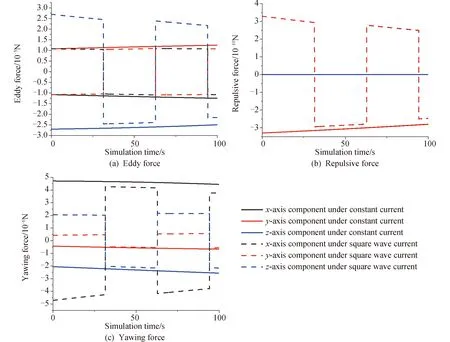
圖8 消旋過程中力的變化
3.3 徑向分布共線構型對消旋的影響
如圖9、圖10所示,在線圈坐標系中可以觀察到目標星中COG點的各軸位置變化,其中y、z軸位置分量變化量在10-14m量級,可認為其仿真結果符合徑向分布的靜態電磁編隊只受磁矩徑向作用的結論,其x軸位置分量即為兩星的相對距離。
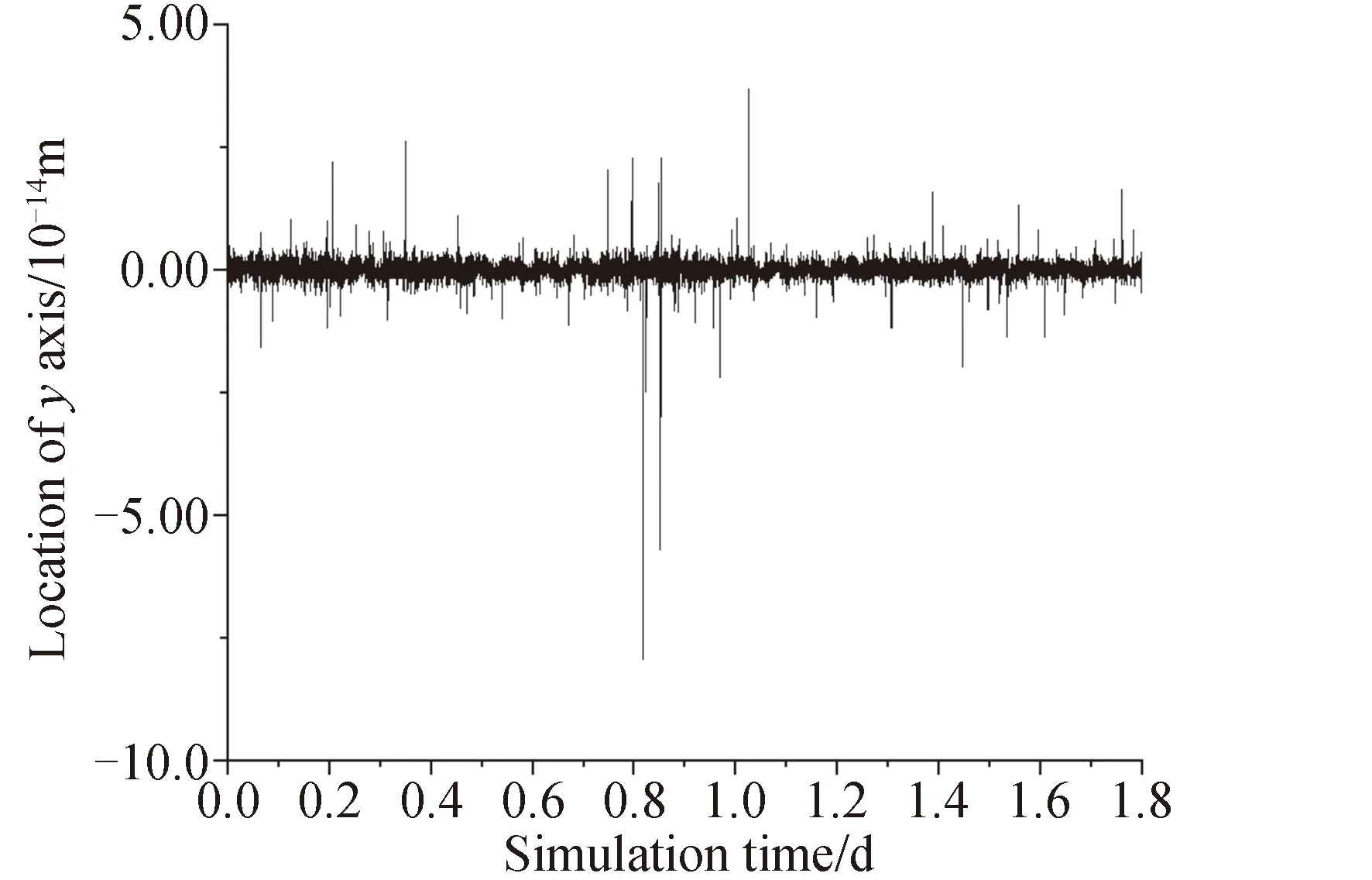
圖9 y軸位置分量變化
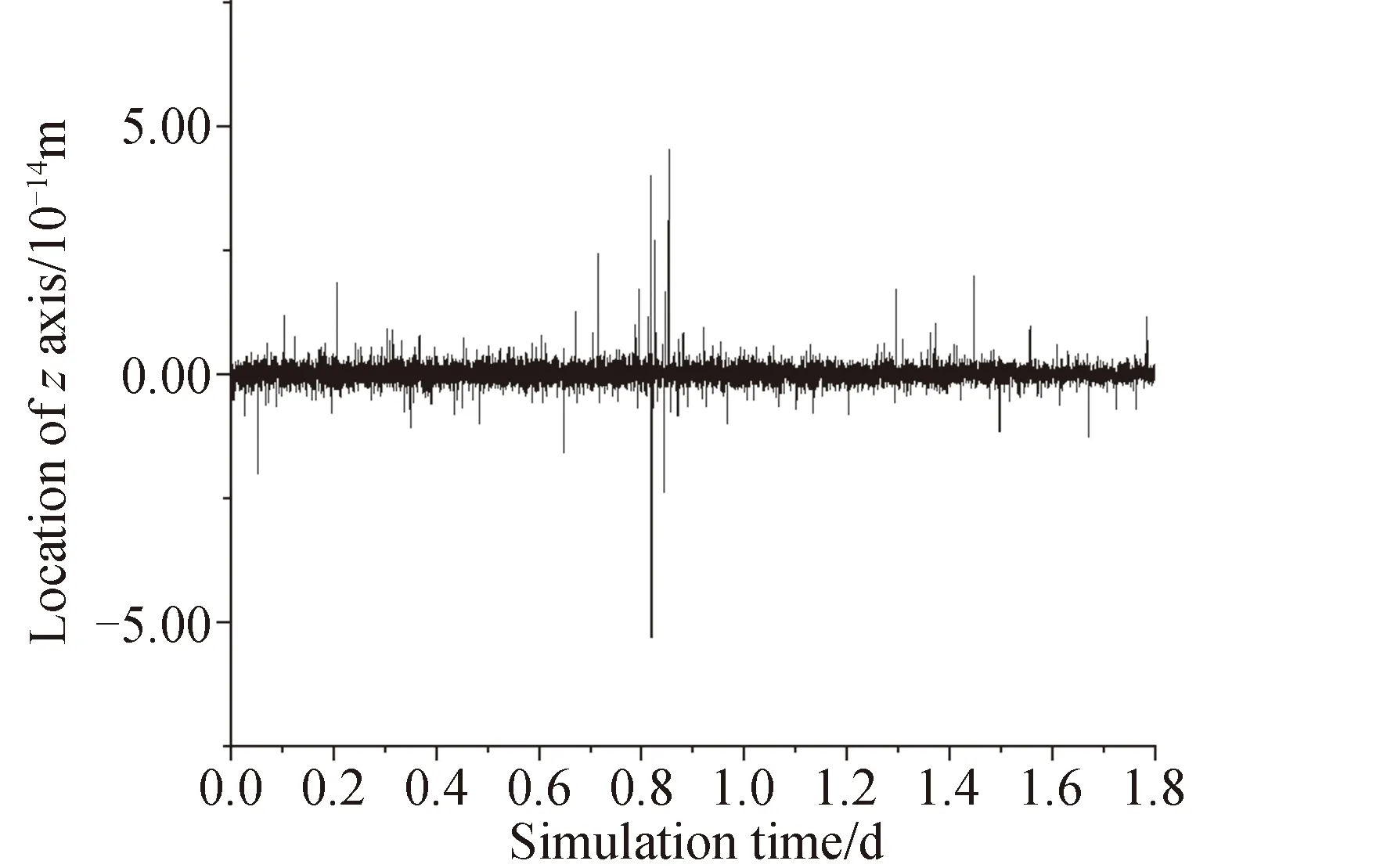
圖10 z軸位置分量變化
3.4 消旋策略的效果
以方波電流為例,結合磁場附加力和交變電磁場的特性,在徑向編隊構型下進行高效消旋且減少推進劑消耗的消旋策略仿真,綜合說明在非勻強磁場中應用交變電磁場控制磁場附加力進行電磁消旋,以及徑向分布消旋編隊的可行性,如圖11、圖12所示。
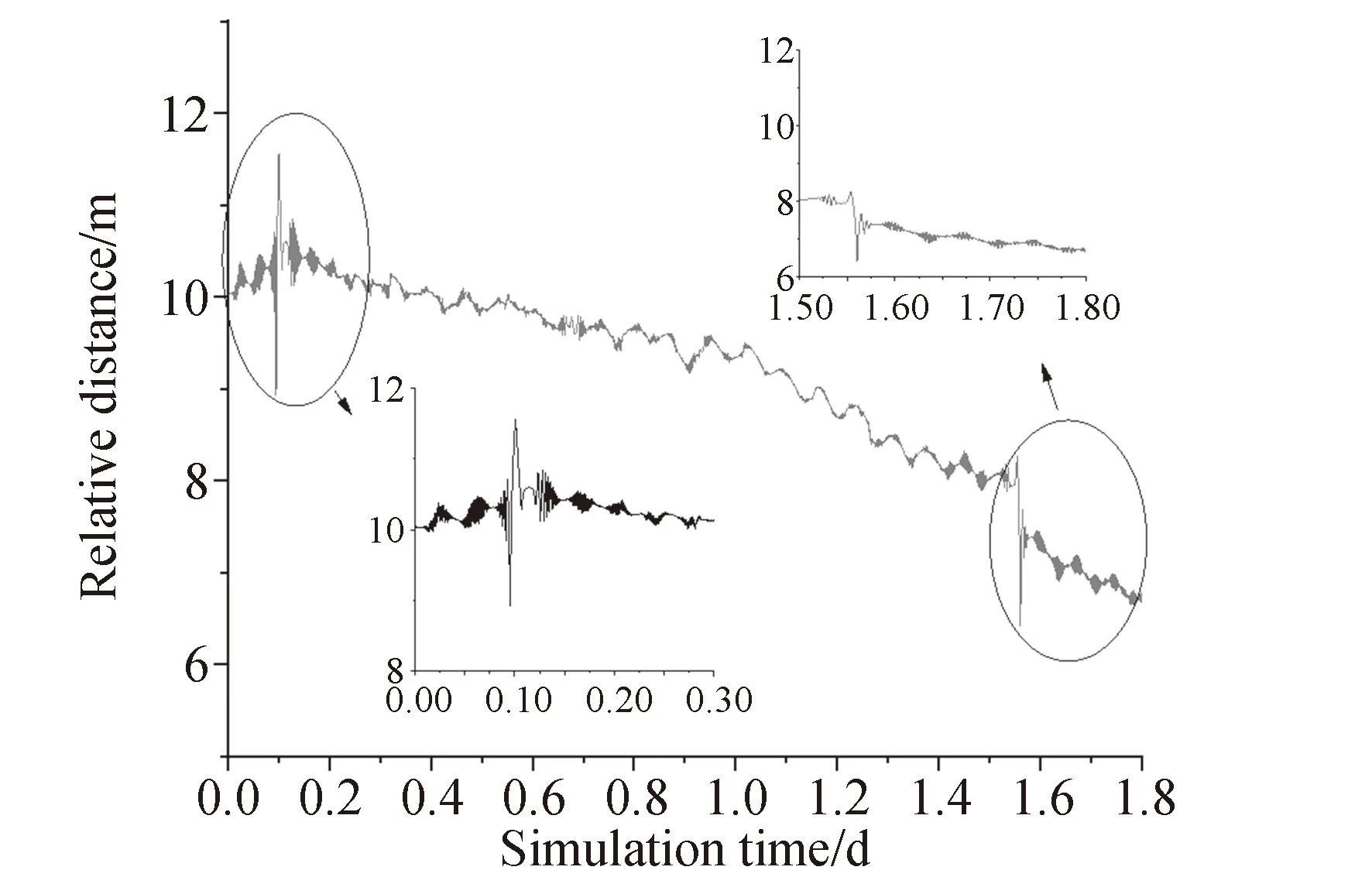
圖11 消旋策略在相對距離方面的效果
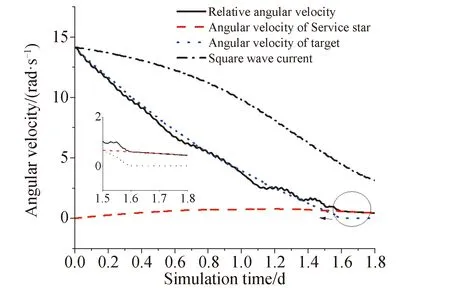
圖12 消旋策略在角速度方面的效果
由圖11可知,利用對交變電磁場的控制可實現對消旋過程進行控制,能初步達到控制相對距離的目的,但是隨著目標角速度下降,在輸出電流幅值不變時,維持消旋過程的進行需要減小相對距離從而維持角速度下降速率基本呈一條斜線,與圖6相比,仿真1.8天時相對距離從6.278m變為6.786m,相對距離有0.5m的變化,且該變化是通過磁場交變實現,并不通過消耗推進劑實現。圖12可看出消旋速率明顯提高,并且目標星的角速度變化曲線恰好證實圖11的結論。從相對距離的變化曲線中可以看到,在消旋過程中利用磁場附加力能維持服務星與目標星的相對距離,該方法具備可行性。由圖11可知剛開始消旋時,目標角速度越大,相對距離變化越小,此時的消旋速率最快。其中相對角速度曲線的波動對應相對距離的變化,當相對角速度變化停滯時,相對距離的曲線變化幅度變大,表現為目標星的角速度下降速率基本不變。從兩星的角速度變化曲線可知,電磁渦流消旋存在以下的弊端:在消旋過程中會導致服務星的角速度增加,如果不主動進行服務星的角動量管理,會導致目標星的角速度始終無法消旋至0,即它們之間會始終存在一個相對角速度。從服務星角速度變化曲線可知,服務星角速度在消旋過程的早期呈單調遞增,在消旋的后期,從目標星的角速度變化曲線的波動可以看出當服務星的角速度比目標星的角速度大時,會導致目標星的角速度增大。即當前的目標星角速度在服務星的磁場中無法引起電磁渦流消旋作用時,會使得相對距離快速變化,使得目標受到的磁感應強度變大,達到新的一個距離與角速度變化的平衡,表現為角速度能夠按一定下降速率繼續下降。圖13表示在整個消旋過程中由于距離變化導致消旋力矩發生相應變化,但隨著目標角速度的下降,消旋力矩總體呈下降的趨勢,下降中的波動主要是由于距離的波動變化引起的。
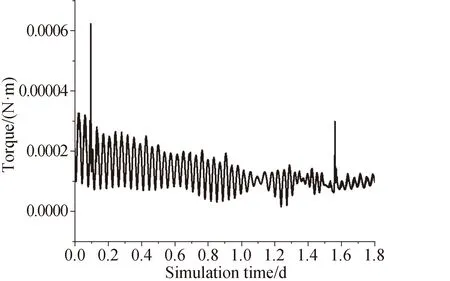
圖13 消旋策略在消旋力矩方面的效果
以相對距離變化曲線中的1.5天至1.6天變化為例進行說明,如圖14、圖15所示,此時距離曲線變化較大,電流相應在正向或負向持續時間較長,使得目標質心所受到的磁感應強度大小也發生相應變化,但電流、磁場后續變化趨于平緩說明此時相對距離與角速度變化達到新的一個平衡,與圖13的力矩變化具有一致性。
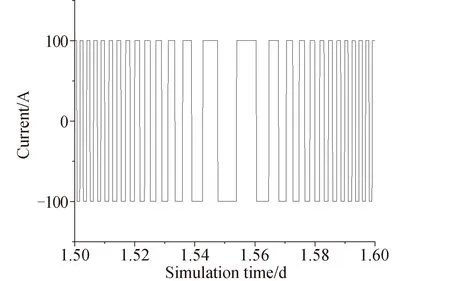
圖14 局部時間內的電流變化
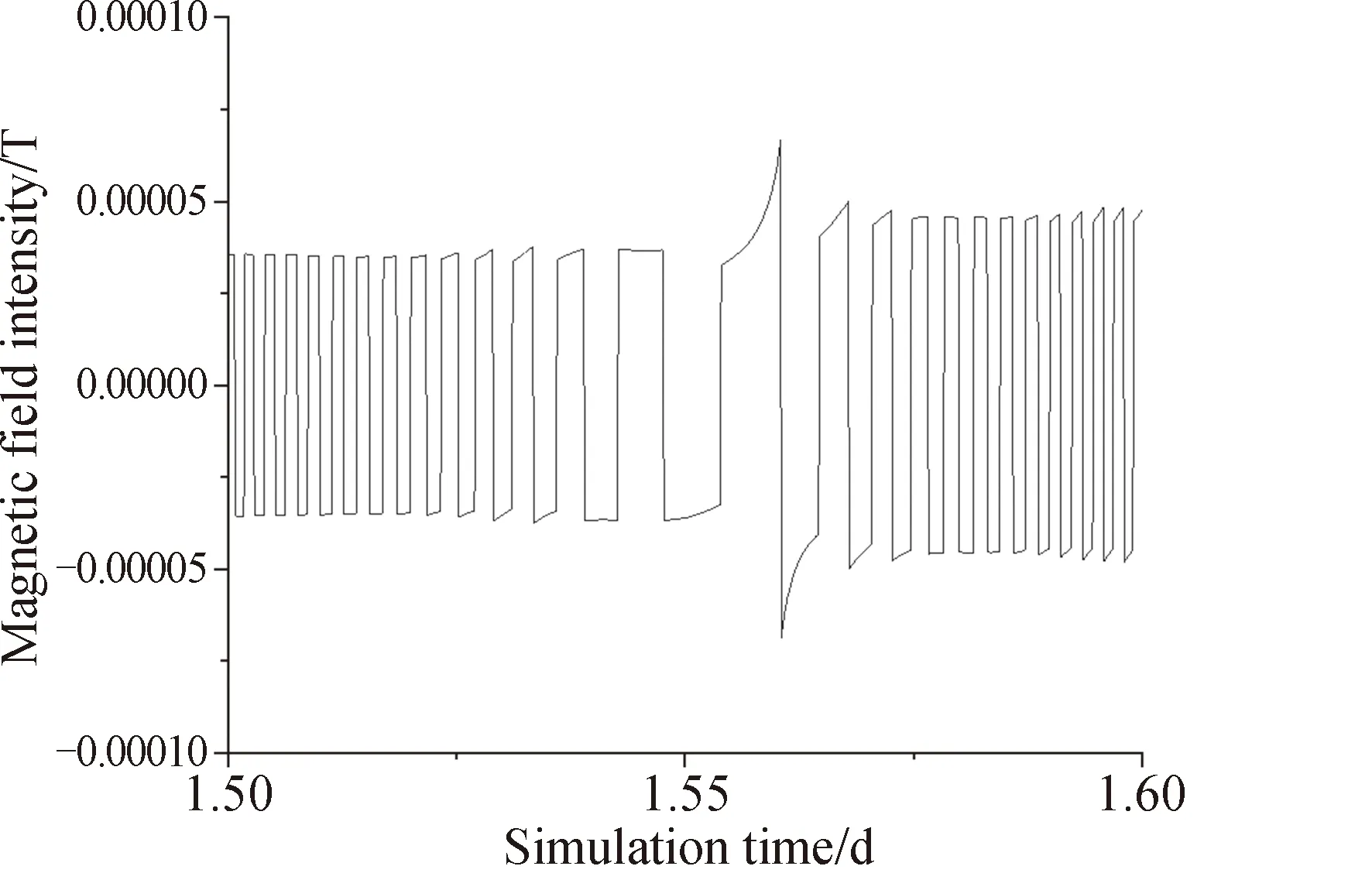
圖15 局部時間內的磁感應強度變化
4 結論
本文主要研究電磁衛星與無控目標組成徑向構型電磁消旋編隊的可能性,通過建立電磁場的數學模型、編隊系統的相對運動方程,將電磁消旋過程中的電磁力與相對位置變化、電磁場變化、角速度變化聯系在一起。通過徑向共線構型編隊條件將兩星的相對位置問題轉化為相對距離問題,在不考慮相對姿態的基礎上,將三維問題簡化為一維問題。通過相對距離的變化調節服務星電磁線圈的交變電流,從而控制無控目標受到的磁感應強度,通過相對距離變化引起的電磁場變化來彌補目標角速度的降低,一定程度上將電磁消旋過程中影響位置的電磁力轉化為主動的牽引力,具有電磁被動牽引和減少推進劑消耗的可能性。
Simulink仿真結果表明:在徑向共線構型的消旋編隊中結合交變電磁場條件下,電磁渦流消旋過程中附加力的應用具有可行性,具有實際工程意義,一定程度上能在消旋的同時減少對服務星位置的控制,減少推進劑消耗。
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23