履帶車輛加速性性能泛函及數值求解
2023-08-03 08:30:18鄒天剛毛飛鴻張金樂劉麗芳崔曉風
兵器裝備工程學報 2023年7期
關鍵詞:優化
鄒天剛,毛飛鴻,張金樂,李 博,吳 維,劉麗芳,崔曉風
(1.中國北方車輛研究所, 北京 100072;2.北京理工大學 機械與車輛學院車輛傳動重點實驗室, 北京 10081;3. 63963部隊,北京 100072)
0 引言
履帶車輛由于其高機動性和高通過能力,在地面作戰以及特殊行駛路況發揮著至關重要的作用。加速性直接影響著履帶車輛的戰場生存能力和快速突擊能力[1]。在發動機的參數確定后,良好的傳動比參數是實現履帶車輛優異加速性能的主要方法之一[2]。
在傳統變速器傳動比設計中,首先確定傳動比闊度,再采用等比級差法或漸變級差法確定中間檔位的傳動比,難以充分發揮發動機性能[3]。汪潤鴻等[4]采用混合粒子群算法,以驅動功率損失率和比油耗損失率為優化目標,優化傳動比。郭謹瑋等[5]以0~100 km/h加速時間和燃油經濟性為優化目標,利用多目標粒子群算法求解最優傳動比。胡文強[6]以原地起步加速時間和對應油耗為目標函數,以內點懲罰函數法求解最優傳動比。Masoud等[7]結合遺傳算法和整數線性規劃優化無級變速器傳動比從而改善發動機效率、減少排放。另外,還有一部分學者通過Isight、Cruise等軟件建立車輛聯合仿真模型和優化算法,從而優化車輛經濟性或動力性[8-11]。
綜上所述,大多數研究集中于建立車輛動力學模型或仿真模型,求解效率較低。另外,動力性的優化目標單一,沒有同時考慮低速加速能力和高速加速能力的影響。
針對上述問題,搭建推進系統加速過程理論分析模型,以推進系統加速能力最優為設計指標,推導推進系統最短加速時間性能泛函的數學表征形式,使用遺傳算法對性能泛函進行數值迭代求解,從而優化變速器速比參數。
1 車輛加速時間性能泛函構建
車輛的加速時間直接反映車輛的動力性能,為了直觀表現履帶車輛加速性能的強弱,構建以加速時間為指標的車輛加速性能泛函數學表征。
加速時半軸施加于驅動輪的轉矩T1為:
式中:Ttq為發動機輸出轉矩;If為發動機旋轉部件轉動慣量;ηx為傳動及行動系統效率;ωe為發動機轉速;i0為主減速比或前傳動與側傳動比之積;ig為傳動裝置變速比;
當傳動系統理想無摩擦情況下,輸出到驅動輪處的扭矩T2為:
所有摩擦阻力轉化到主動輪處的摩擦阻力為:
式中:Tr為等效到驅動輪處的實際摩擦阻力轉矩;r為主動輪半徑;u為車輛行駛速度。
傳動系中的摩擦損耗功率Pr為:
式中,i=i0ig。
車輛加速過程中,車輛總動能損失等于阻力損耗功率,從而得到:
式中:m為整車質量;Iw為車輪轉動慣量;Ff為滾動阻力;Fw為空氣阻力;Fi坡道阻力。
對式(5)化簡后可得車輛加速度av數學表達式:
根據車輛加速度表達式av=dv/dt可知,車輛由車速u0加速到u1所需的時間T為加速度av的倒數對車速u的積分:
利用式(6)及行駛阻力表達式,得到加速時間T數學表達式為:
式中:Tdl為動力源輸出力矩;f為滾動阻力系數;CD為空氣阻力系數;A為迎風面積;β為坡度角。
將車輛加速時間T轉換為性能泛函形式,從而將速比優化問題轉化為性能泛函取極值的問題[12]。為簡化性能泛函表征形式,同時考慮履帶車輛在行駛過程中滾動阻力系數變化不大的情況,作如式(9)所示的變量代換:
若忽略換擋時的車速變化,近似認為換擋過程在一瞬間完成,此時只在有限的瞬間i發生突變,其他時間內i為恒定值,加速時間性能泛函為:
式中:uj1為升為j擋時的初始車速;uj2為升為j+1擋前的車速;ge為加速時所處的擋位數;ηTB為行動系統效率。
理論情況下,隨著擋位數的增多,車輛在行駛過程中能夠使車輛驅動力曲線愈加靠近理想驅動力曲線。但實際上,擋位數的增多會導致換擋次數的增加,而換擋次數增加會導致總換擋時間延長,考慮換擋次數的代價并簡化性能泛函,認為每次換擋所需要的換擋時間τ為400 ms,從而得到有級變速履帶車輛的加速時間性能泛函:
因此,有級變速履帶車輛加速時間性能泛函被積函數表達式為:
2 性能泛函求解方法
1) 速比上邊界條件的確定
我國國家軍用標準要求軍用越野車輛必須具備在30°以上坡道原地起步的能力[13],通常選取最大爬坡度βmax=32°。忽略空氣阻力和加速阻力,從而得到履帶車輛速比上邊界計算公式:
式中:Ttmax為動力源最大轉矩;βmax為最大爬坡度。
同時為避免履帶車輛原地打滑現象,車輛驅動力不得大于路面最大附著力:
式中:φ為路面附著系數,選取φ=0.8;N為路面法向力。
2) 速比下邊界條件的確定
履帶車輛最高車速要求一般不低于75 km/h,從而得到速比下邊界:
式中:vmax為設計的履帶車輛最高車速指標;nEP為動力源最大功率輸出轉速。
3) 基于遺傳算法的性能泛函求解
有級式變速器速比為逐級變化的非連續變量,無法得到連續的泛函極值時的速比曲線。故采用遺傳算法對有級變速器加速時間性能泛函取極值時的速比條件進行計算,獲得履帶車輛最優加速性泛函宗量i的數值解,實現最優加速性能速比匹配設計。遺傳算法的主要特點是不需要目標函數求導和連續性的約束,直接對遺傳基因實現優化;同時可以實現并行性計算以及良好的全局搜索性能[14-15]。
采用遺傳算法進行尋優計算時,其初始種群隨機產生,為了避免出現積分后的加速時間或功率分配利用率向小于0的方向發展的情況,給定尋優時的驅動力約束,保證加速度不會出現負值:
γ1(u,i)=Ft(u,i)-Ff(u,i)-Fw(u,i)≥0
(16)
為保證路面具有充足的附著力,必須使得車輛驅動力不大于路面附著力:
γ2(u,i)=Ft(u,i)-φmg≤0
(17)
為了提升車輛的動力性能,對其相鄰兩擋級差不要求必須逐級遞減,但為了保證換擋的正常進行,相鄰級差約束在1.1倍,從而得到如下約束條件:
同時需保證速比逐級遞減的基本結構要求,即:
γ4(ij)=ij>ij+1
(19)
除此之外,最大最小速比必須滿足其上下邊界的要求:
上述5類約束條件保證了車輛設計的基本性能要求及必須滿足的物理條件。
由于表征履帶車輛加速性能的重要指標為0~32 km/h加速時間,同時為提高履帶車輛行車過程中40~60 km/h超車加速時間,對2個加速性能指標利用權重法進行動力性加權得到綜合性能泛函作為適應度函數:
式中:F(i)為加速性綜合目標函數;fu0-u1為u0-u1的加速時間;ζ1、ζ2為加速性權重系數,ζ1+ζ2=1。
3 結果與討論
選取某履帶車輛作為性能泛函速比優化的實例,車輛具體參數值如表1所示。
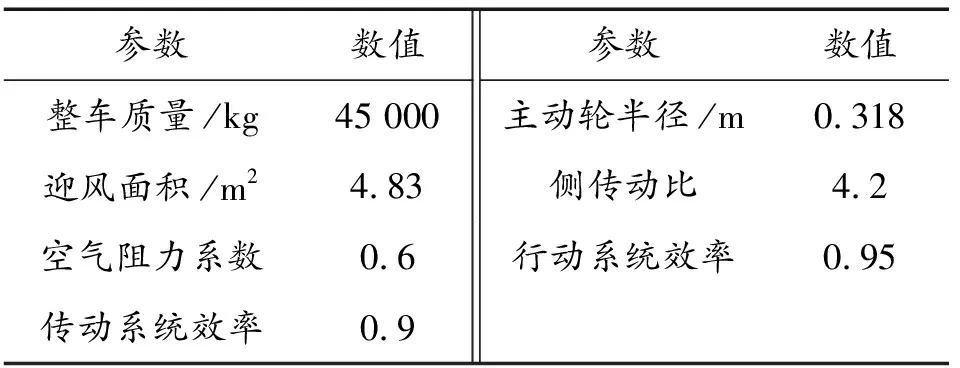
表1 車輛參數值
將參數代入式(14)和式(15)計算得到速比范圍為8.16≤imax1≤11.24,imin1≤1.43。利用GAs+fmincon混合遺傳算法計算不同加速性權重系數下的最優加速性速比設計,包括ζ1=1.0,ζ2=0時的0~32 km/h加速性能,ζ1=0.8,ζ2=0.2時的綜合加速性能以及ζ1=0,ζ2=1時的40~60 km/h超車加速性能,得到優化前后的速比如表2所示。
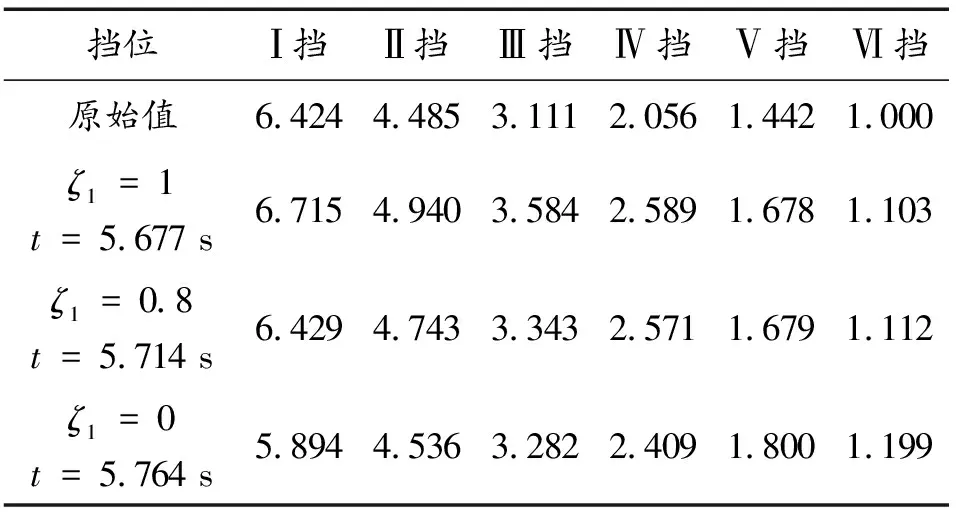
表2 速比優化前后對比
不同動力性加權系數下,速比優化值不同。總的來說,當優化目標為40~60 km/h超車加速時間時,Ⅳ、Ⅴ、Ⅵ三擋趨向于變大,因為該車速下車輛主要位于該3個擋位,此時能夠提供更大的驅動力,利于超車加速性能。當優化目標為0~32 km/h起步加速時間時,Ⅰ、Ⅱ、Ⅲ擋在兼顧級差等約束的前提下趨向于約束的極大值。
采用動力性換擋規律進行車輛仿真計算,得到優化前后加速性的對比分析曲線如圖1所示。圖1(b)為圖1(a)的局部放大圖。由圖1可以看出,按照泛函優化之后得到的速比下,0~32 km/h加速時間由原來的6.34 s縮短為5.84 s,縮短了7.89%。但優化前后對于最高車速影響不大,說明在基本不改變車輛最高車速性能的前提下,對履帶車輛0~32 km/h加速性能利用性能泛函優化設計是可行的。
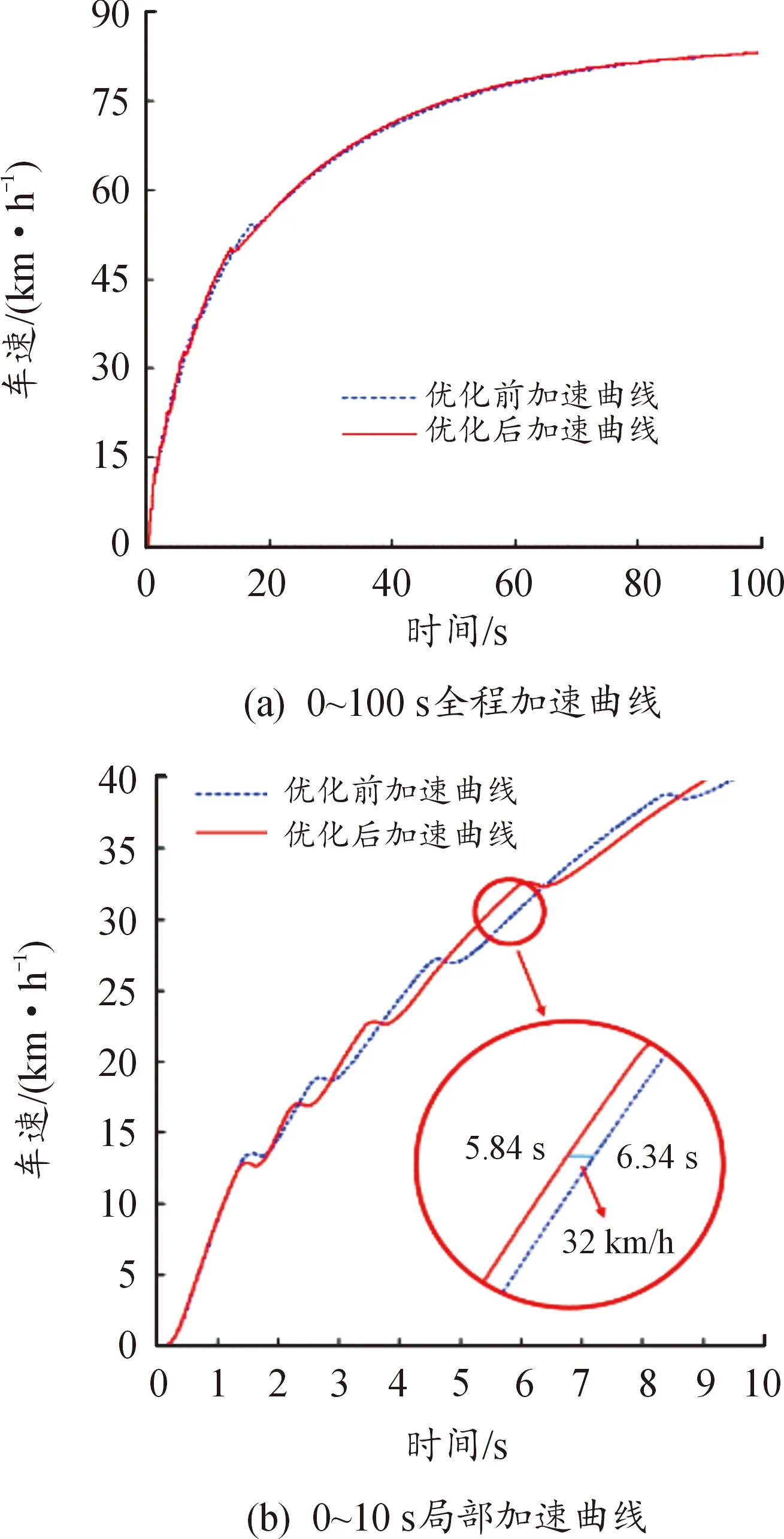
圖1 優化前后加速曲線對比圖
加速時擋位利用率表如表3,由表3可知優化前后各擋位在加速過程中的利用情況。0~32 km/h已經加速到Ⅳ擋,且優化后各擋位在加速過程中的利用率主要體現在Ⅲ、Ⅳ擋位的變化,Ⅰ、Ⅱ擋位利用率變化不明顯。優化后Ⅲ擋加速利用率降低而Ⅳ擋加速利用率明顯升高。根據a=du/dt對其基本原理進行闡述,車速增高后,du占比偏高且a由于擋位增大而減小,而在車速較低時,du占比較低且a較大,影響不顯著。由表3看出,Ⅳ擋速比值的明顯增加對于車輛0~32 km/h加速時間的縮短起到了關鍵作用。因此在不改變動力源輸入及換擋次數的基礎上,提高履帶車輛加速性的關鍵在于對終止車速相鄰2個擋位進行優化設計,盡可能使得在約束條件下增大該擋位的速比值。

表3 0~32 km/h加速時間擋位利用率表(%)
但需要注意的是車輛無法實現起步加速到任意車速全部時間最短,由于換擋時刻的不同及換擋降速現象的發生,優化前后的車速會出現交叉上升的現象。因此極值速比的選取與性能泛函的終止車速密切相關,需要在速比設計之初確定設計指標。
4 結論
將泛函分析理論引入有級變速器速比優化問題,推導得出有級變速車輛的加速性能泛函數學表征,并基于遺傳算法進行數值求解,得到了性能泛函的最優加速性目標速比。主要結論如下:
1) 當優化目標為超車加速時間時,Ⅳ、Ⅴ、Ⅵ三擋趨向于變大;當優化目標為起步加速時間時,Ⅰ、Ⅱ、Ⅲ擋趨向于變大。
2) 優化后的速比能夠有效提升車輛動力性能,0~32 km/h加速時間由6.34 s縮短為5.84 s。
3) 對終止車速相鄰兩個擋位進行優化設計能夠有效提升車輛加速性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45