純電動商用車抖動問題的測試與分析
2023-07-30 16:54:15曾海軍李劍劉武
專用汽車 2023年7期
曾海軍 李劍 劉武

摘要:某純電動商用車在滿載質量下做30%爬坡度試驗時,出現車身抖動幅度大、驅動電機過流故障,導致車輛無法正常行駛,嚴重影響了駕駛的舒適性。利用CAN等工具采集相關數據報文,通過該車型的抖動問題研究和試驗測試分析,分析出車輛抖動和過流的原因是由于電機控制器MCU的防抖增益系數設置不合理、電機電流環超調及變速箱換檔邏輯不合適引起的。
關鍵詞:純電動商用車;抖動;超調;增益系數;還扭
中圖分類號:U467.5 ?收稿日期:2023-03-10
DOI:10.19999/j.cnki.1004-0226.2023.07.024
1 抖動源分析
車輛輪胎(車輪)不平衡的動態力,路面激勵、發動機燃燒、發動機和傳動系統旋轉部件的不平衡,以及其他部件的相對運動產生的動態作用力,都會直接或間接地傳到車身,引起車身局部(如轉向系統、座椅、前圍板等)的強烈振動,常稱為整車抖動[1-2]。
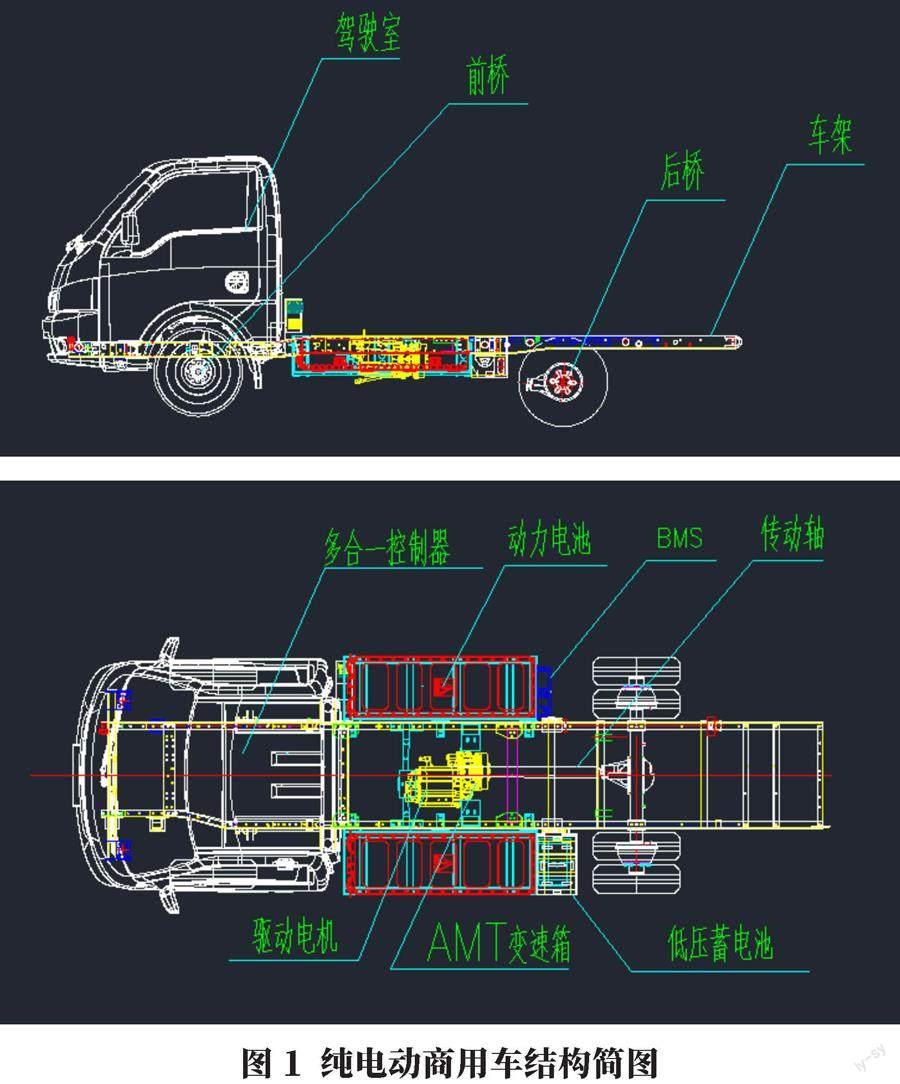
純電動商用車的結構如圖1所示。從外形上看,與傳統商用車并沒有什么區別,但純電動商用車的驅動系統主要由動力電池、驅動電機、電機控制器、變速箱等部分組成,其驅動電機相當于傳統商用車的發動機,動力電池相當于原來的油箱,通過動力電池向電機提供電能,在電機控制器的控制下,驅動電機運轉,推動汽車運動。
本文研究的純電動商用車為中置后驅型,電驅動力系統布置為:a.動力電池系統布置在駕駛室后大梁兩側;b.驅動系統主要包括驅動電機、變速箱、傳動軸、后橋等,通過懸置及吊架與大梁連接。主要振動源是包括驅動電機、變速箱、傳動軸、車橋及輪胎在內的驅動系統。電動商用車中的電機抖動與乘用車相比較而言更加明顯,對于汽車應用而言,電機的NVH問題具有極其重要的意義,并需要在設計階段被廣泛考慮[3]。
2 測試設備及方法
本次測試借助電腦、CAN卡、Eclipse for TriCore、Origin8、FlashSpirit、MATLAB、ECTEK Measure Data Analyzer V2等工具和軟件對電機轉速、扭矩、電流、工作指令等數據進行采集和分析;借助Vector Ape、CANape 14、CANalyzer等工具和軟件采集變速箱控制器TCU數據并對其進行分析。
3 基本參數及解決思路
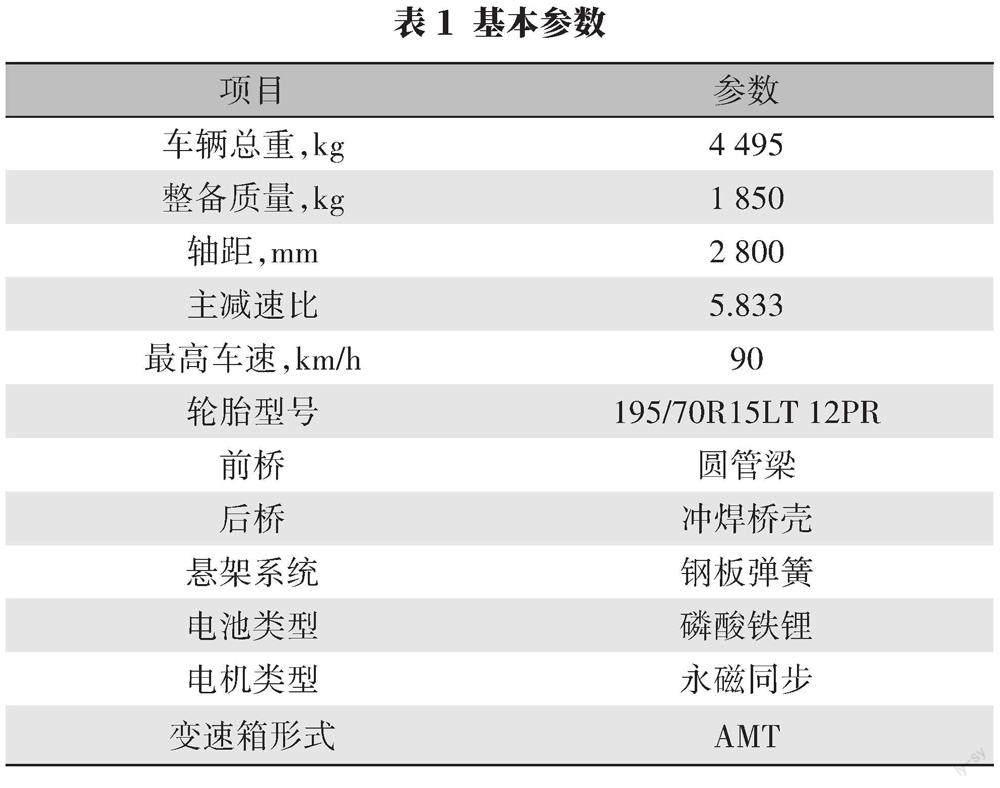
某純電動商用車的基本參數見表1。
通過與駕駛員交流,實地跟車體驗,主觀感受整車抖動實際情況,排除車架、車橋及懸架等機械部件抖動原因,結合經驗及現有測試設備,采集MCU和TUC數據,通過對原始數據分析,提出如下問題解決思路:a.優化MCU防抖功能;b.修正電機電流控制參數;c.改善換擋邏輯。
4 測試數據分析
4.1 MCU防抖數據分析
車輛起步時,采集MCU控制器數據,電機處于低轉速高扭矩的工作狀態,此時容易出現抖動,如圖2所示,需要開啟主動防抖功能。采集轉速抖動的信息,可以得到周期性抖動的頻率,將抖動頻率輸入防抖扭矩參數生成仿真器中,可以得到防抖濾波器的參數值,將其應用于車上,觀察產生防抖扭矩的值,是否對波動轉速產生抑制作用,并根據防抖效果,適當調整最大防抖扭矩和增益系數。
4.2 電機電流數據分析
轉速波動過大時,為響應大扭矩導致電流失控,如圖3所示,控制器報過流三級故障。目前電機控制采用查表法,即不同的轉速下,可響應的最大扭矩不同,當轉速高頻劇烈波動時,對扭矩的控制會出現超調的情況,進而引起電流調節的不穩定,控制器過流風險顯著增加,可通過修改電機控制參數緩解該風險,但還是需要從根源上解決過流問題。
4.3 換擋邏輯分析
本文中的純電動商用車采用的是6擋AMT自動變速箱,換擋過程中出現打齒異常聲音,采集變速箱TCU數據,根據變速箱TCU數據分析,是由于電機異常扭矩導致的,如圖4所示,需要電機在換擋過程中關閉主動防抖功能。
5 解決措施及驗證
5.1 針對MCU防抖功能問題
優化MCU防抖參數,將對應抖動頻率作為初始參數輸入濾波器后可得到抖動濾波參數,如圖5所示,并結合試驗,調整增益系數,可對車輛起步抖動起到很好的抑制效果,如圖6所示。
5.2 針對電機電流控制參數問題
優化電流環KP參數后,減少電流超調量,同時配合主動防抖功能,滿載坡道起步換擋的電流控制質量得到提升,波動在可控范圍內,如圖7所示。
5.3 針對換擋邏輯問題
在TCU的換檔邏輯中,換擋過程分為兩個階段:第一階段為調速換擋,擋位掛上后扭矩清零,進入第二階段-還扭。這兩個過程合在一起叫做換擋過程,第二階段還扭過程為扭矩從0開始增加到整車的目標扭矩,在這個過程中實際的機械結構已經掛上擋,在滿載爬坡的工況下電機易出現抖動情況,需要啟用防抖功能。但變速箱的異響出現在第一階段,所以需要變速箱發送一個標志位將這兩個過程區分開,以便能消除換擋過程中出現車輛抖動的風險。換擋調速過程中關閉主動防抖,還扭過程中開啟主動防抖,抑制車輛起步抖動的同時也緩解了換擋結束后的主動防抖功能帶來的轉速波動引起的異響,如圖8所示。
6 改進后的測試結果
通過優化MCU防抖參數,調整增益系數、優化電流環KP參數,減少超調量及優化換擋邏輯后,重新標定車輛程序,車輛數據測試如圖9所示。可以看出,電機扭矩、轉速、車速都為平滑的曲線,電機實時響應目標扭矩,車輛整體受力平衡,可勻速行駛。通過優化MCU控制算法及變速箱換擋邏輯,解決了車輛滿載爬坡時出現的大幅度抖動和電機過流問題,提升了車輛平順性。
7 設計優化建議
依據故障現象和對原始數據的分析,抖動故障主要是因為正常驅動的換擋邏輯不適用于滿載爬坡工況,爬坡時擋位升高,導致電機扭矩與速比匹配不合適,電機無法在高轉速下響應峰值扭矩,進而引起車輛抖動和出現電機過流故障。可通過減小電機峰值扭矩的方式,維持爬坡時的低擋位,同時優化主動防抖的功能參數,增加防抖扭矩響應靈敏度,在抖動初始時施加較大的防抖扭矩,遏制抖動的加劇。
8 結語
本文以某電動商用車滿載爬坡時整車抖動為案例,對MCU防抖功能、電機電流參數及變速箱換擋邏輯等數據進行分析,通過對換擋邏輯的優化、防抖濾波器增益系數調整及減少電流超調量來達到解決故障的目的,為純電動商用車類似問題的解決提供了很好的參考意見,讓更好的產品服務于客戶。
參考文獻:
[1]曾晰,申秀敏,李利明.新型純電動汽車抖動現象測試與分析[J].工程與試驗,2017(3):41-45.
[2]王志亮,劉波,李晶華,等.汽車抖動性產生機理與分析方法研究[J].噪聲與振動控制,2020(8):87-89.
[3]施佳能,丘云燕,劉志翔,等.純電動商用車坡道駐車抖動研究與優化[J].現代工業經濟和信息化,2022(6):242-245.
作者簡介:
曾海軍,男,1981年生,工程師,研究方向為純電動商用車底盤研發與項目管理。
