三相光伏并網發電系統預測直接功率控制研究
2023-06-21 05:55:45任博裴旭東
機電信息 2023年12期
任博 裴旭東


摘要:提出了一種基于有限控制集模型預測控制的光伏并網發電系統控制方案,該控制策略構建了表征變換器期望輸出的最小價值函數,使用變流器離散時間模型預測k+1時刻的電流和功率值,通過滾動優化選擇最優開關狀態直接控制系統有功和無功功率,以實現光伏發電過程中的高動態響應。這種方法的主要優點是不需要線性電流控制器、坐標變換和空間矢量調制。最后通過仿真試驗和對比研究,驗證了所提方法的優越性和有效性。
關鍵詞:模型預測控制;價值函數;滾動優化
中圖分類號:TM921.51? ? 文獻標志碼:A? ? 文章編號:1671-0797(2023)12-0014-03
DOI:10.19514/j.cnki.cn32-1628/tm.2023.12.004
0? ? 引言
可再生能源發電(風力發電和光伏發電)由于其能量的隨動性[1],對與其相連的變流器的動態性能提出了更高的要求。與直流控制和間接電流控制相比,變流器的直接功率控制具有動態性能好、控制結構簡單的優點。傳統的直接功率控制方法對變換器的瞬時功率進行解耦[2-3],并將其與參考值進行比較,然后通過PI控制器、滯環結構和扇區判斷對變換器進行功率增量控制。該方法具有一定的時間延遲,這將導致負載功率控制的不準確,并增加穩態誤差。
近年來,幾種預測控制算法已在變流器控制中得到應用。一種眾所周知的方法是無差拍控制[4-5],并已應用于逆變器、整流器、多級有源整流器、有源濾波器、功率因數預調節器和不間斷電源中的電流控制。它使用系統的模型來計算電壓基準,以使電流在一個調制周期內達到其參考值。然后,通過脈寬調制手段獲得最優電壓矢量。模型預測控制[6](MPC)是另一類預測控制器,它使用系統的離散模型來預測某個時間周期內變量的行為,并且使用價值函數作為最優輸出選擇的標準。為了減少在線求解優化所需的繁雜計算工作量,將轉換器建模為具有有限數量狀態的系統,并且只有一個時間步長可用于優化。這樣,所有可能的狀態都可以在線評估,然后,選擇使價值函數最小化的最優電壓矢量。
本文提出了一種用于光伏并網逆變器的預測直接控制方法。在所提出的模型預測控制策略中,考慮了轉換器有限數量的可能開關狀態,評估了每個開關狀態對負載電流和輸入功率的影響,構建了基于直接評估輸入有功和無功功率誤差的價值函數,并通過滾動優化在下一個采樣周期期間選擇并應用最小價值函數的切換狀態。最后,通過仿真試驗驗證了該控制方法的有效性及可行性。
1? ? 光伏并網發電系統數學模型
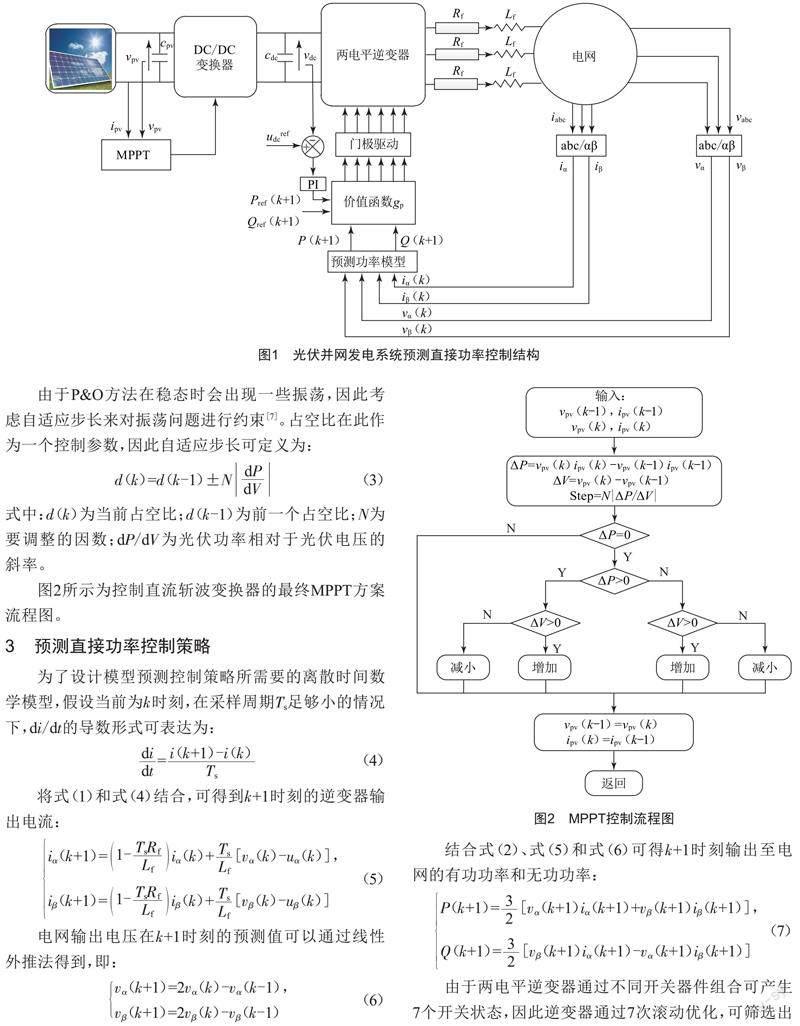
本文所研究的光伏并網發電系統架構由光伏陣列、直流斬波變換器、兩電平逆變器、RL濾波電路及電網組成,如圖1所示。
由于本文所研究的控制策略其主要控制對象為三相兩電平光伏并網逆變器,因此該系統的數學模型可表示為:
式中:uɑβ、iɑβ分別為兩相靜止ɑβ坐標系下的逆變器輸出電壓、電流;vɑβ為兩相靜止ɑβ坐標系下的電網側電壓;Rf、Lf分別為濾波器電阻和電感;P、Q分別為輸入電網的有功和無功功率。
2? ? 最大功率點跟蹤方案
本文中,最大功率點跟蹤(MPPT)模塊采用擾動-觀察算法(P&O)實現。P&O方法主要基于電源電壓(P-V)曲線的斜率,最大功率點左邊斜率較小,改變固定電壓,功率改變較小;而最大功率點右邊斜率較大。因此,在算法設計上,在最大功率點左邊選擇一個較大的電壓步長,而在最大功率點右邊選擇一個較小的電壓步長,以加快跟蹤效果。
由于P&O方法在穩態時會出現一些振蕩,因此考慮自適應步長來對振蕩問題進行約束[7]。占空比在此作為一個控制參數,因此自適應步長可定義為:
式中:d(k)為當前占空比;d(k-1)為前一個占空比;N為要調整的因數;dP/dV為光伏功率相對于光伏電壓的斜率。
圖2所示為控制直流斬波變換器的最終MPPT方案流程圖。
3? ? 預測直接功率控制策略
為了設計模型預測控制策略所需要的離散時間數學模型,假設當前為k時刻,在采樣周期Ts足夠小的情況下,di/dt的導數形式可表達為:
將式(1)和式(4)結合,可得到k+1時刻的逆變器輸出電流:
電網輸出電壓在k+1時刻的預測值可以通過線性外推法得到,即:
結合式(2)、式(5)和式(6)可得k+1時刻輸出至電網的有功功率和無功功率:
由于兩電平逆變器通過不同開關器件組合可產生7個開關狀態,因此逆變器通過7次滾動優化,可篩選出k+1時刻的最優電壓矢量。預測直接功率控制所需最小價值函數可設定為:
式中:Pref(k+1)、Qref(k+1)分別為k+1時刻逆變器輸出有功和無功功率參考值,其值同樣通過線性外推法得到。
4? ? 仿真試驗
為驗證預測直接功率控制策略的有效性進行仿真試驗。光伏電站額定容量設定為15 kW,同時為真實模擬實際電網情況,在電網和逆變器之間設置R-L濾波器,直流側電容cdc為1 000 μF,濾波電阻Rf為0.25 Ω,濾波電感Lf為0.12 mH,直流側參考電壓udcref為700 V,電網頻率ω設定為100 Hz,電網電壓v為400 V,開關采樣周期Ts為40 μs。
為檢驗該控制策略的動穩態性能,設定初始時刻風電場輸出功率為400 W/m2,并分別在0.1、0.2、0.3 s時刻階躍至600、800、1 000 W/m2。從圖3所示的仿真試驗波形可以看出,與預測電流控制結果相似,兩電平光伏并網逆變器直流側電壓在發生擾動后可很快趨于平衡。
同時,逆變器輸出有功功率和電流隨著風電場輸出功率變化而逐漸增大,為使光伏并網系統發電效率最高,其無功功率始終控制為零。與預測電流控制策略相比,該控制結構不需要鎖相環和dq旋轉變換,但均可實現快速跟蹤外界擾動變化。
5? ? 結束語
本文所提預測直接功率控制策略簡單易懂,無須任何類型的電流控制器或調制器,即可生成單位功率因數下的正弦輸入電流。該控制策略充分利用功率轉換器的離散特性,對于所有可能的開關狀態,通過滾動優化篩選出下一時刻的最優電壓矢量,從而使兩電平逆變器輸出有功和無功功率跟隨參考值快速變化,系統采樣周期越短,控制精度和效果越好。
[參考文獻]
[1] 謝寶昌.兆瓦級風力發電機綜述[J].電機與控制應用,2007(2):1-4.
[2] 陳樹勇,鮑海,吳春洋,等.分布式光伏發電并網功率直接控制方法[J].中國電機工程學報,2011,31(10):6-11.
[3] 楊勇,阮毅.三相并網逆變器直接功率控制[J].電力自動化設備,2011,31(9):54-59.
[4] 尚磊,孫丹,胡家兵,等.三相電壓型并網逆變器預測直接功率控制[J].電工技術學報,2011,26(7):216-222.
[5] 張永昌,謝偉,李正熙.PWM整流器預測無差拍直接功率控制[J].電機與控制學報,2013,17(12):57-63.
[6] CORTS P,RODRGUEZ J,ANTONIEWICZ P,et al.Direct Power Control of an AFE Using Predictive Control[J].IEEE Transactions on Power Electro-nics,2008,23(5):2516-2523.
[7] SERA D,MATHE L,KEREKES T,et al.On the Perturb-and-Observe and Incremental Conductance MPPT Methods for PV Systems[J].IEEE Journal of Pho-tovoltaics,2013,3(3):1070-1078.
收稿日期:2023-03-09
作者簡介:任博(1988—),男,甘肅人,助理工程師,研究方向:高低壓電器產品試驗。
通信作者:裴旭東(1990—),男,甘肅人,高級工程師,研究方向:發輸變電工程及高電壓技術。
