基于圖像處理的室內(nèi)巡檢機(jī)器人坐標(biāo)提取方法研究
2023-06-21 08:03:41葛動(dòng)元周加超叢佩超
機(jī)電信息 2023年12期
葛動(dòng)元 周加超 叢佩超
摘要:為獲取室內(nèi)安全走道中的障礙物信息,以引導(dǎo)巡檢機(jī)器人進(jìn)行自主作業(yè),提出一種基于分布式遠(yuǎn)程通信與二維坐標(biāo)提取的地圖更新方法。控制ROS(Robot Operating System)機(jī)器人基于Gmapping算法創(chuàng)建全局先驗(yàn)地圖,用于巡檢機(jī)器人的軌跡規(guī)劃;若檢測到新增障礙物,通過圖像處理方法獲取障礙物位置坐標(biāo),并將其作為標(biāo)記點(diǎn),引導(dǎo)機(jī)器人進(jìn)行局部建圖,從而實(shí)現(xiàn)對(duì)原始地圖的更新。試驗(yàn)結(jié)果表明,該方法具有一定的可行性。
關(guān)鍵詞:巡檢機(jī)器人;分布式遠(yuǎn)程通信;二維坐標(biāo)提取;動(dòng)態(tài)地圖更新
中圖分類號(hào):TP242? ? 文獻(xiàn)標(biāo)志碼:A? ? 文章編號(hào):1671-0797(2023)12-0086-03
DOI:10.19514/j.cnki.cn32-1628/tm.2023.12.024
0? ? 引言
利用機(jī)器人定期對(duì)消防過道進(jìn)行巡視,是人員遇到緊急事故時(shí)實(shí)現(xiàn)安全疏散的重要保證,而最新的環(huán)境地圖信息是巡檢機(jī)器人完成自主導(dǎo)航的前提條件。
目前,同步定位和建圖(Simultaneous Localization and Mapping,SLAM)技術(shù)是通過結(jié)合檢測、跟蹤動(dòng)態(tài)障礙物技術(shù)來實(shí)現(xiàn)地圖的構(gòu)建和更新[1]。
相關(guān)研究表明,由于系統(tǒng)缺乏實(shí)時(shí)更新的機(jī)制,SLAM技術(shù)構(gòu)建的柵格地圖在長時(shí)間運(yùn)行后易產(chǎn)生難以修正的累計(jì)誤差[2-3]。
Xu等人[4]通過改進(jìn)ORB RGB-D SLAM與占用柵格地圖提出了一種新的室內(nèi)實(shí)時(shí)定位系統(tǒng),克服了現(xiàn)有解決方案面臨的問題,然而深度相機(jī)容易受到隨機(jī)噪聲的影響和感知范圍的限制,導(dǎo)致產(chǎn)生深度圖像的部分缺失,最終影響視覺SLAM的定位精度。
針對(duì)上述移動(dòng)機(jī)器人的室內(nèi)定位精度不高的問題,為進(jìn)一步提高機(jī)器人室內(nèi)定位準(zhǔn)確度,本文以巡檢機(jī)器人在校園內(nèi)消防安全走道的自主巡檢為研究背景,提出一種基于分布式遠(yuǎn)程通信與二維坐標(biāo)提取的地圖更新方法。
1? ? 樣機(jī)介紹和通信設(shè)置
1.1? ? 測試樣機(jī)
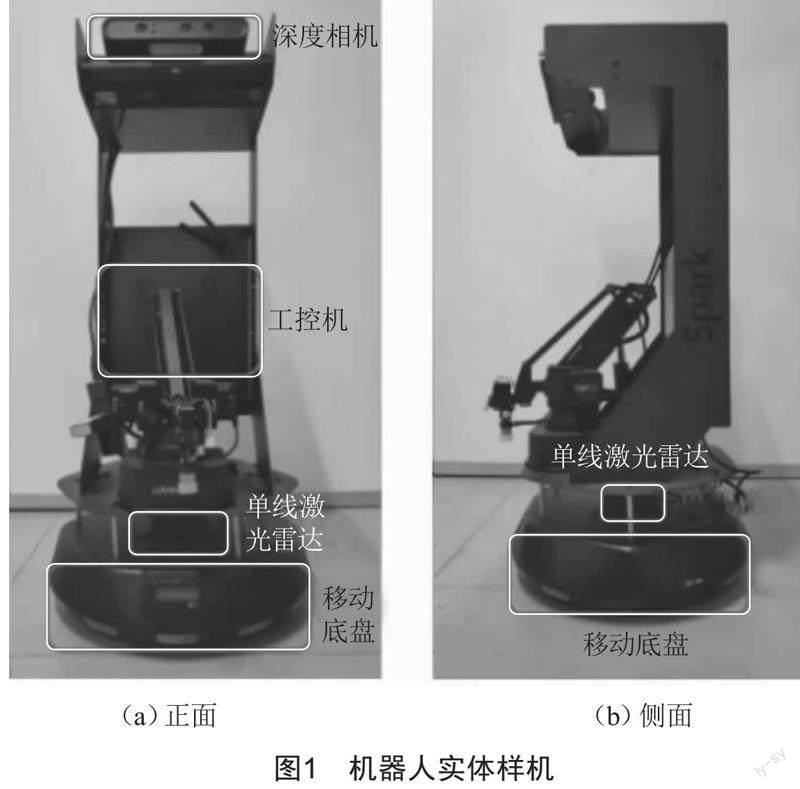
圖1所示為深圳市創(chuàng)想未來科技公司研制的型號(hào)為Spark-T的自主導(dǎo)航機(jī)器人,本文將其作為巡檢機(jī)器人的測試樣機(jī),搭載基于Ubuntu 16.04的開源機(jī)器人操作系統(tǒng)。
1.2? ? 分布式通信設(shè)置
為實(shí)現(xiàn)通信,在Ping命令測試網(wǎng)絡(luò)的實(shí)時(shí)工況后,基于ROS的分布式框架上所有節(jié)點(diǎn)可以在不同的主機(jī)上運(yùn)行,因此可以通過分布式通信機(jī)制控制多機(jī)器人同時(shí)工作。本文將巡檢機(jī)器人和先導(dǎo)機(jī)器人分別作為主機(jī)和從機(jī),實(shí)現(xiàn)通信的步驟如下:
1)在兩臺(tái)機(jī)器人主機(jī)中設(shè)置計(jì)算機(jī)IP地址和名稱,保證多個(gè)計(jì)算機(jī)底層數(shù)據(jù)通信的暢通。
2)通過在主從機(jī)上設(shè)置環(huán)境變量的方式,實(shí)現(xiàn)對(duì)ROS Master的位置定義。
2? ? Gmapping算法建圖
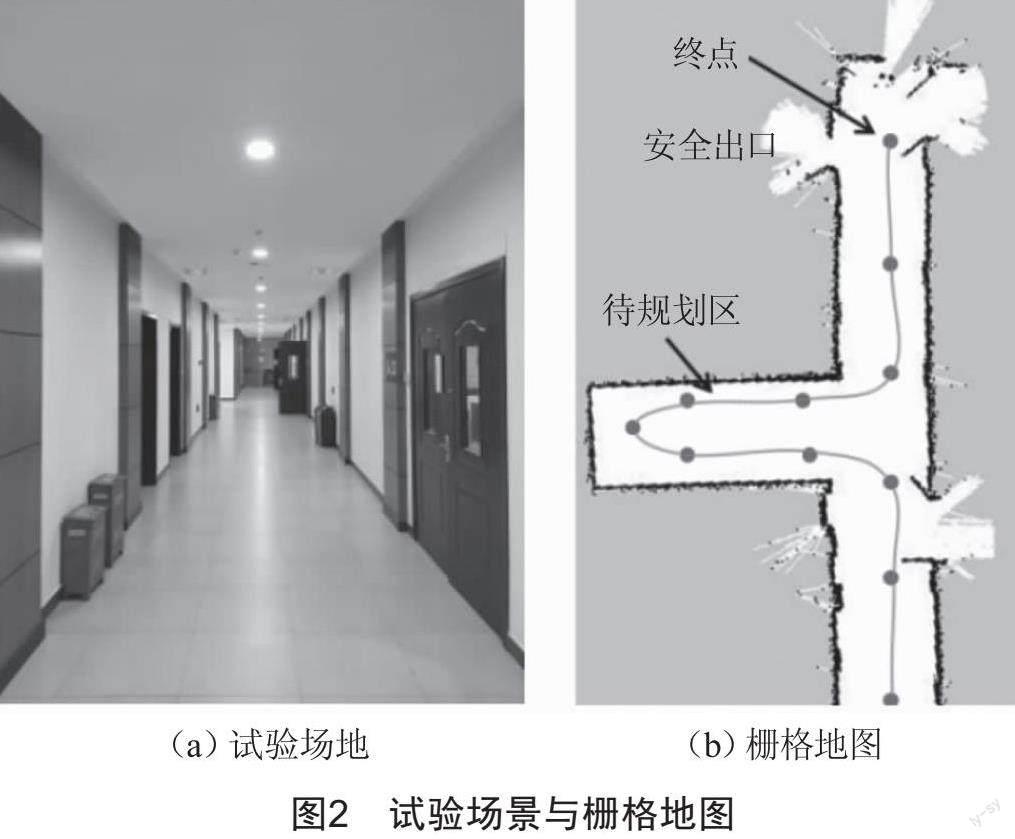
為創(chuàng)建全局先驗(yàn)地圖,用于巡檢機(jī)器人的軌跡規(guī)劃,本節(jié)選取了校園內(nèi)的一個(gè)室內(nèi)安全疏散過道作為實(shí)體機(jī)器人測試場地,如圖2(a)所示。
Gmapping算法主要以激光雷達(dá)和里程計(jì)為硬件載體,通過采集環(huán)境中的點(diǎn)云數(shù)據(jù)和里程計(jì)數(shù)據(jù)構(gòu)建未知環(huán)境的地圖[5]。此外,研究表明,Gmapping算法在構(gòu)建例如長廊、走道等具有低特征的小場景地圖時(shí),計(jì)算開銷低且建圖精度高[6]。
巡檢機(jī)器人在走道的工作環(huán)境屬于長廊場景,因此選用基于Gmapping算法的激光SLAM作為機(jī)器人的建圖算法,對(duì)走道構(gòu)建全局的二維柵格地圖,如圖2(b)所示,并將該圖作為巡檢機(jī)器人導(dǎo)航的全局先驗(yàn)地圖。
3? ? 機(jī)器人坐標(biāo)提取
3.1? ? 自動(dòng)巡檢和坐標(biāo)分析
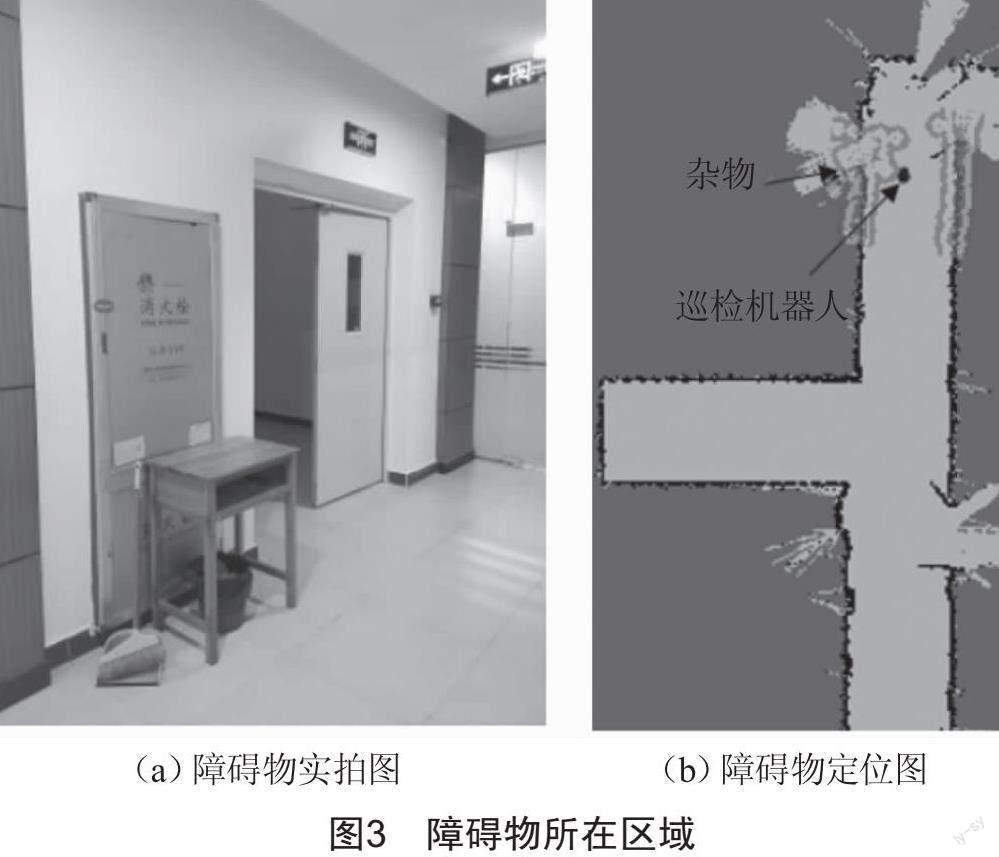
為進(jìn)行地圖更新和巡檢試驗(yàn),在走道的安全出口旁擺放桌子等雜物作為障礙物,如圖3(a)所示。生成的局部定位地圖如圖3(b)所示,其中紅色部分代表雷達(dá)原始數(shù)據(jù)點(diǎn)分布情況,藍(lán)色區(qū)域表示為保持安全距離而產(chǎn)生的障礙物膨脹區(qū)域。
由圖3(b)可知,機(jī)器人實(shí)時(shí)避障過程中激光雷達(dá)掃描到物體的輪廓不一定完整,且膨脹區(qū)域跟周圍物體相連接,難以準(zhǔn)確提取障礙物中心坐標(biāo),即存在坐標(biāo)的不確定性。相比之下,機(jī)器人的形狀和大小一般固定,通過圖像處理方式易于確定坐標(biāo)值,且處于障礙物附近,因此將問題轉(zhuǎn)化為提取機(jī)器人在避障時(shí)的實(shí)時(shí)坐標(biāo),該坐標(biāo)即先導(dǎo)機(jī)器人的導(dǎo)航指引點(diǎn),自主導(dǎo)航至此點(diǎn)時(shí)可與障礙物保持一定距離且不影響局部建圖。
為采用直角坐標(biāo)系法對(duì)機(jī)器人的位置信息進(jìn)行描述,假設(shè)每個(gè)柵格的中心位置為柵格的直角坐標(biāo),(m,n)為柵格地圖中任意一點(diǎn),則每個(gè)柵格編號(hào)P都與(m,n)相對(duì)應(yīng),計(jì)算公式如式(1)所示。柵格中心坐標(biāo)(mGrid,nGrid)與P之間同樣具有映射關(guān)系。
式中:int為取整函數(shù);mlength為坐標(biāo)取值范圍;S為柵格粒的大小。
3.2? ? 機(jī)器人像素坐標(biāo)確定
本節(jié)主要結(jié)合Halcon視覺庫確定機(jī)器人在二維圖像中的像素坐標(biāo),進(jìn)行了如圖4所示的圖像處理操作,最終提取了機(jī)器人的像素坐標(biāo)。
4? ? 局部建圖及更新
巡檢機(jī)器人根據(jù)標(biāo)記點(diǎn)的位置進(jìn)行針對(duì)性的局部建圖,地圖更新前后的對(duì)比如圖5所示。由圖可知,地圖(b)中出現(xiàn)了更多的陰影部分,說明獲得了更多的障礙物信息,地圖信息更加完善,更有利于后續(xù)的機(jī)器人避障作業(yè)。
5? ? 結(jié)束語
本文提出了一種基于全局先驗(yàn)地圖與二維坐標(biāo)提取的地圖更新方法。以校園的室內(nèi)消防安全走道為例,對(duì)所提方法進(jìn)行實(shí)體樣機(jī)驗(yàn)證。結(jié)果表明,所提基于圖像處理的機(jī)器人定位方法能對(duì)機(jī)器人進(jìn)行像素坐標(biāo)定位,具有一定的可行性。
[參考文獻(xiàn)]
[1] 馬輝.基于巡檢車視覺的半動(dòng)態(tài)目標(biāo)在語義地圖中的更新方法研究[D].杭州:浙江科技學(xué)院,2020.
[2] ENDRES F,HESS J,STURM J,et al.3-D mapping with an RGB-D camera[J].IEEE Transactions on Robotics,2014,30(1):177-187.
[3] WHELAN T,KAESS M,LEONARD J J,et al.Deformation-based loop closure for large scale dense RGB-D SLAM[C]//2013 IEEE/RSJ International Conference on Intelligent Robots and Systems,2013:548-555.
[4] XU L C,F(xiàn)ENG C,KAMAT V R,et al.An occupancy grid mapping enhanced visual SLAM for real-time locating applications in indoor GPS-denied environments[J].Automation in Construction, 2019,104:230-245.
[5] ABDELRASOUL Y,SAMAN A B S H,SEBASTIAN P.A quantitative study of tuning ROS gmapping parameters and their effect on performing indoor 2D SLAM[C]// 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automa-tion(ROMA),2016:1-6.
[6] 鄭兵,陳世利,劉蓉.基于螢火蟲算法優(yōu)化的Gmapping研究[J].計(jì)算機(jī)工程,2018,44(9):22-27.
收稿日期:2023-03-07
作者簡介:葛動(dòng)元(1970—),男,湖南邵陽人,博士,副教授,研究方向:機(jī)器視覺、機(jī)器學(xué)習(xí)。
