無依托瞄準技術在運載火箭基準確立上應用的研究
2023-06-19 01:51:38劉聰聰宋小艷
導彈與航天運載技術 2023年2期
關鍵詞:設備
范 毅,何 歡,劉聰聰,宋小艷
無依托瞄準技術在運載火箭基準確立上應用的研究
范 毅,何 歡,劉聰聰,宋小艷
(北京航天發射技術研究所,北京,100076)
針對大型運載火箭無人值守瞄準的需求,提出一種基于激光捷聯慣組與瞄準儀相結合的無依托瞄準方法,通過激光慣組自主尋北獲得北向基準,再測量出箭上慣性單元棱鏡法線與返回光束的準直偏差角,將數據進行合成、解算,最終獲得箭上慣組棱鏡的初始方位。無依托瞄準技術具有組成簡單、自動化程度高、操作流程簡化、精度指標可靠的特點,可以提供不大于2’的瞄準綜合誤差,技術成果滿足中國航天發射任務的應用需求,可供未來大型運載火箭瞄準方式參考。
運載火箭;無依托瞄準;激光捷聯慣組
0 引 言
火箭地面瞄準系統的作用,是調整火箭制導系統中慣性器件的方位敏感軸,使之與射擊方向(以下簡稱射向)或已知方向(與射向保持已知角度值)所在的鉛垂面相垂直[1],或通過精確測量獲得慣性器件的方位敏感軸與射向的偏差角,從而保證火箭初始方位精度[2],在起飛前通過地面瞄準確定火箭起飛初始方位。
伴隨著航天全球化的發展趨勢,運載技術發展速度明顯加快,以美國為代表的航天大國已由單純追求更大運載能力向“快速、經濟、可靠、安全”等方向轉變。國際上大中型運載火箭在發射場測試的流程一般20天左右,火箭到發射臺后基本實現無人自動操作,具備在多處不同地點進行協同遠程發射控制、輔助支持工作的能力[3]。隨著近些年以激光捷聯慣組為核心的定位定向瞄準技術的發展,在瞄準精度方面獲得了較大的突破和提升,其精度指標可以和傳統地面瞄準相提并論,而且在工作環境和工作時間上更有優勢,使通過慣組建立火箭起飛基準的方法成為可能[4],這為運載火箭提供了無依托的基準建立方式。
1 無依托瞄準方案
1.1 方案原理
無依托瞄準是相對于以往有基準的地面瞄準方式而言,指不依靠地面基準,自主定位定向的瞄準方式。
以往地面瞄準通過在地面建設地標點位從而獲得基準邊,通過瞄準儀瞄準已知基準邊確立基準方位,或者瞄準預先建立的基準棱鏡確立基準方位,再轉動瞄準儀瞄準箭上慣性單元棱鏡確定箭體初始方位。這種地面瞄準方式的缺點是需要建立固定的瞄準點位和初始瞄準方向,瞄準點位需要定期標定。
無依托瞄準設備依據發射場火箭的架設位置,大致架設到箭上慣性單元棱鏡的法線方向,如圖1所示。工作時,無依托瞄準設備自主尋北獲得北向基準,由瞄準光管或者瞄準儀向箭上棱鏡發出一束光線,再測量出箭上慣性單元棱鏡法線與返回光束的準直偏差角,將數據進行合成、解算,最終獲得箭上慣組棱鏡的初始方位。采用無依托瞄準設備可以簡化瞄準設備,擺脫發射場地束縛,提高運載火箭發射的機動性。
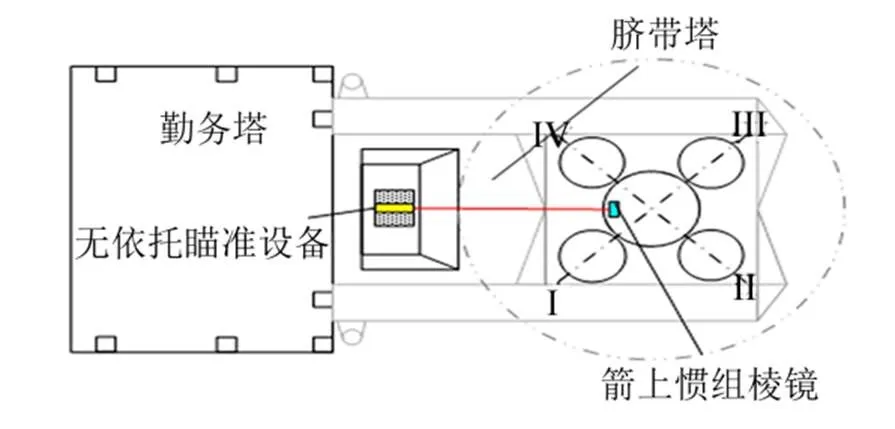
圖1 無依托瞄準設備的架設
1.2 發射場布局
無依托瞄準設備由激光捷聯慣組、自準直光管(或者瞄準儀)、衛星定位設備、瞄準控制器等組成。在運載火箭發射場可以采用兩種瞄準布局方式:火箭發射塔瞄準和移動瞄準車瞄準。
在火箭發射塔狀態,瞄準設備放置在與箭上慣組棱鏡等高的臍帶塔上,激光慣組與自準直光管捷聯,通過激光慣組自主尋北獲得光管架設位置與北向夾角,自準直光管發出一束光線至箭上棱鏡,移動瞄準設備架設位置使返回光進入自準直光管敏區,從而獲得箭上棱鏡與北向夾角,瞄準設備架設示意見圖2。
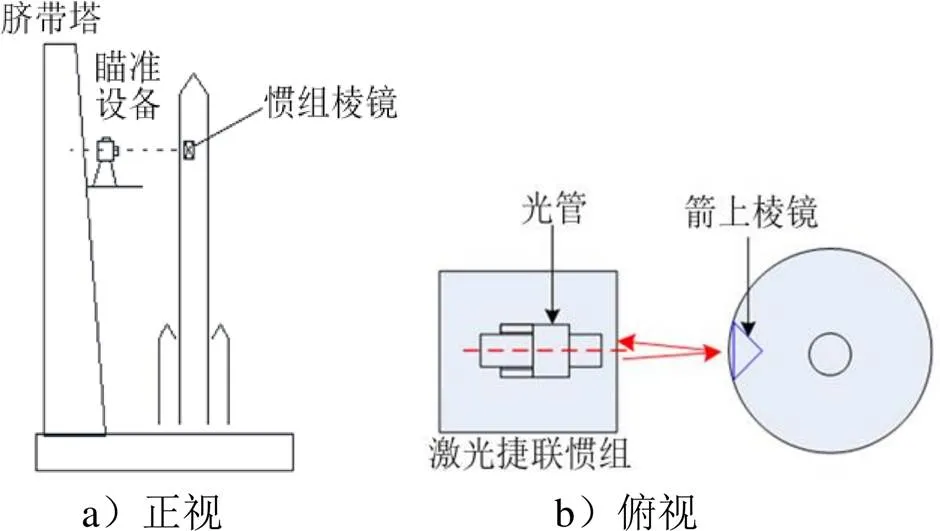
圖2 瞄準設備的布置
隨著擾動基座尋北技術的應用,瞄準設備具備了高精度慣性尋北能力,這為運載火箭發射場提供了移動瞄準車瞄準的新方式。在瞄準車上激光慣組與瞄準儀捷聯,通過激光慣組自主尋北獲得瞄準儀光管與北向夾角。瞄準儀發出一束光線至箭上棱鏡,移動瞄準儀使返回光進入瞄準儀光管敏區,從而獲得箭上棱鏡與北向夾角,圖3給出瞄準車瞄準發射場架設示意。
圖3 無依托瞄準設備在發射場布置
1.3 設備組成及工作模式
無依托瞄準設備示意如圖4所示。激光捷聯慣組可以實現自主慣性尋北,激光捷聯慣組采用多位置尋北方案,對慣性器件誤差進行補償,消除其對尋北精度的影響。采用擾動基座尋北技術實現擾動基座下的高精度慣性尋北能力,滿足多種工況下塔態或車載的使用條件要求。

圖4 無依托瞄準設備的組成
激光捷聯慣組慣性尋北的同時,自準直光管實時測量準直偏差角,并將準直偏差角傳遞至激光捷聯慣組進行計算。在慣性尋北完成后,將北向基準傳遞至與其固聯的自準直光管光軸上,激光捷聯慣組將對準結果與收到的自準直光管準直偏差角進行合成解算,獲得瞄準棱鏡等效法線方位角,并將瞄準結果傳輸至瞄準控制器,瞄準控制器收集衛星定位信息和瞄準數據通過網絡傳遞給運載火箭控制系統。
2 無依托瞄準理論推導

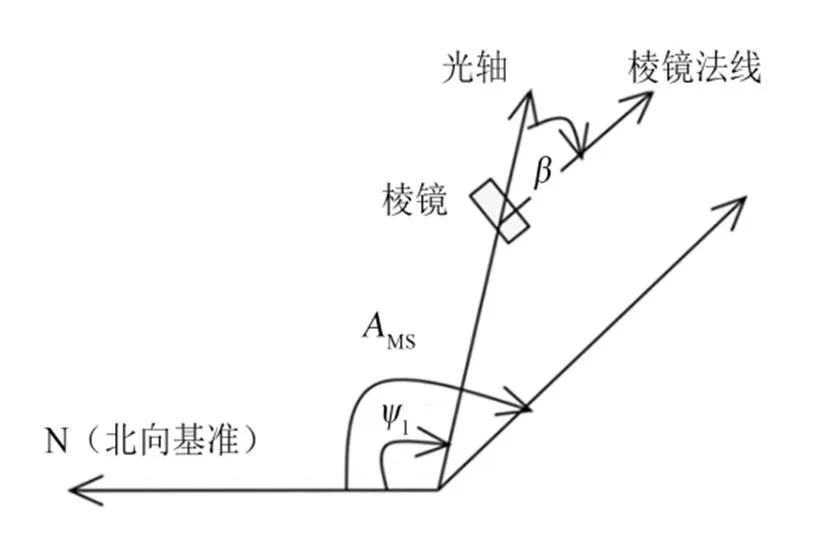
N—北向基準方向;—自準直光管光軸基準方位角,即瞄準基準方位角;—自準直光管光軸與箭上瞄準棱鏡法線之間的準直偏差角;—箭上瞄準棱鏡等效法線的方位角。
2.1 定義坐標系
2.1.1 n系:地理坐標系
地理坐標系是原點位于運載體所在的地球表面,其中一軸與地理垂線重合的右手直角坐標系。n軸指向東,即E;n軸指向北,即N;n軸沿地垂線指向天頂,即U。這個坐標系通常叫作東北天(ENU)坐標系。地理坐標系即為本系統的導航坐標系[5]。
2.1.2 b系:載體坐標系(慣組坐標系)
載體坐標系的原點是載體重心,b沿載體橫軸指向右,b沿載體縱軸方向指向前,b沿載體豎軸方向向上,坐標系構成右手直角坐標系。
2.1.3 t系:光管坐標系
光管坐標系的原點在光管中心t,t軸為光軸方向;ttt平面與光軸t垂直,t、t在ttt平面內相互垂直且t軸沿光管光軸指向右,構成右手坐標系。
2.2 慣組載體坐標系與地理坐標系(導航坐標系)之間的轉換

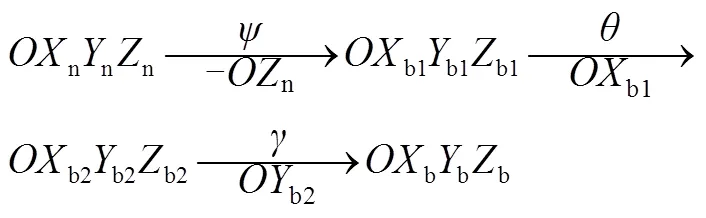
其變換表達式為

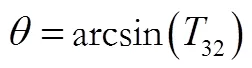
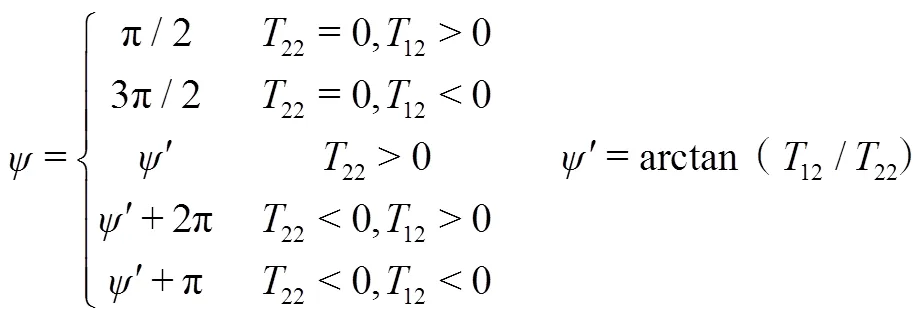
則,姿態矩陣為

姿態角按式(3)~(5)計算:


2.3 光管坐標系向地理坐標系之間的轉換
激光捷聯慣組載體坐標系(慣組本體b系)和自準直光管坐標系(t系)如圖6所示。
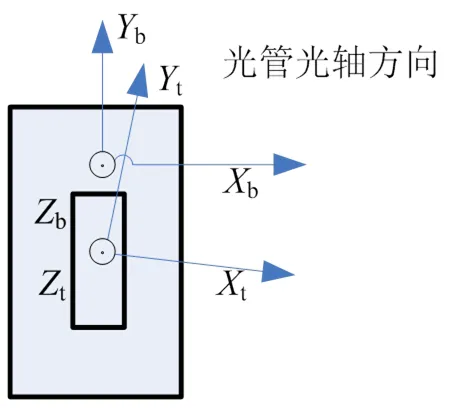
圖6 慣組坐標系和光管坐標系
光管和慣組在當地地理坐標系下的安裝誤差角可按式(6)~(8)計算:
則可按式(9)計算兩坐標系誤差修正矩陣:


自準直光管光軸方位角(光軸相對大地北向夾角)、俯仰角及橫滾角可按式(11)~(13)計算:


瞄準棱鏡等效法線的方位角為

綜上所述,瞄準過程即獲得箭上瞄準棱鏡法線方位角的過程,主要包括3部分:
a)采用三軸激光捷聯慣組,三位置尋北方案,獲得捷聯慣組本體系相對導航坐標系(當地地理坐標系)間姿態矩陣,完成初始對準;
b)自準直光管與激光捷聯慣組固聯,對慣組坐標系和自準直光管坐標系進行標定,獲得兩者的安裝誤差矩陣,通過坐標系變換,獲得光管光軸的方位角和姿態角;
c)利用自準直光管對瞄準棱鏡法線的自準直偏差角測量,獲得瞄準棱鏡法線方位角,即瞄準角,完成瞄準過程。
3 瞄準誤差分析
無依托瞄準設備瞄準誤差包括激光捷聯慣組尋北誤差、自準直光管測量誤差、常數傳遞及穩定性誤差。激光捷聯慣組尋北誤差的誤差源包括:陀螺零偏,加速度計零偏引起的方位誤差,加速度計與陀螺敏感軸不平行誤差,陀螺標度誤差,溫度誤差,輸出傳遞誤差等。
陀螺零偏參數是激光慣組的重要誤差參數之一,是衡量激光陀螺精度水平的重要指標。對于激光捷聯慣組而言,零偏參數具有隨機變化的特點,其穩定性對慣性導航精度影響巨大,技術指標要求十分嚴格,只有零偏穩定性滿足要求,才能通過一定技術手段減小零偏帶來的影響。
加速度計在理想狀態下,當外部輸入加速度為零時,加速度計的輸出電流也應為零。但實際應用中,受機械結構、電子器件等因素的影響,在輸入加速度為零的情況下,加速度計也會有電流輸出,即存在零位偏移。
采用多位置對準,理論上陀螺常值零偏帶來的方位誤差和加速度計的常值零偏帶來的方位誤差可以對偶相消,因此,從捷聯慣組的尋北理論可知,其方位對準誤差可表示為[9]
從式(15)中可以看出,方位對準誤差包含兩個分量:殘余的陀螺零偏;北向軸的調平或傾斜誤差。
加速度計與陀螺敏感軸不平行誤差是水平狀態下,加速度計敏感軸與陀螺敏感軸不平行引起的誤差,通過系統級標定,不平行誤差可以測定。
陀螺標度誤差是指標度因數的實際值相對標稱值的變化,工程應用中,因激光陀螺自身的特點,其標定因數一般比較穩定,在短時間內變化量較小,因此,在慣組系統中,可以通過系統級標定,測出陀螺的標度因數。
溫度變化是對慣性器件誤差變化的外界環境影響因數。為了降低和補償溫度對慣性器件精度的影響,通過溫度試驗,識別出慣性器件的溫度模型,計算出相應的誤差項并實時進行補償。
輸出傳遞誤差是輸出過程中多項誤差共同作用的結果,在誤差計算中需予以考慮。
結合上述的誤差分析,匯總各項誤差,并考慮工作環境等影響,則激光捷聯慣組尋北誤差(2.7)不大于60″。


4 試驗驗證
利用大地測量基準邊,通過經緯儀傳遞測量校準無依托瞄準設備瞄準誤差,無依托瞄準設備的校準如圖7所示。
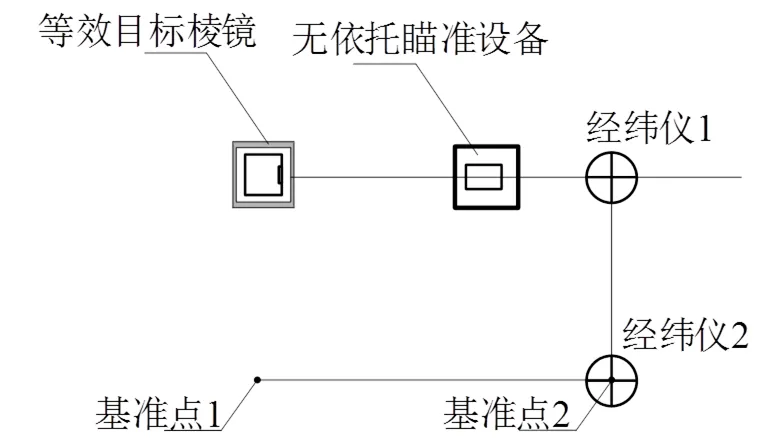
圖7 無依托瞄準設備的校準
在等效目標棱鏡法線方向架設無依托瞄準設備,在瞄準設備正后方架設經緯儀1,在方位基準點上1架設標桿儀,在基準點2上架設經緯儀2。無依托瞄準設備工作獲得一組瞄準數據,經緯儀瞄準基準邊傳遞獲得校準數據,通過比對兩組瞄準數據獲得瞄準誤差。瞄準數據校準對比誤差數據如表1所示。試驗結果顯示,無依托瞄準設備的瞄準誤差不大于2′。
表1 瞄準數據校準對比表
Tab.1 Comparison of aiming and calibration
序號瞄準校準瞄準-校準 1154°41′33″154°40′40″53″ 2154°45′30″154°45′18″12″ 3340°13′7″340°13′18″-11″ 4340°15′22″340°15′58″-36″
5 結束語
無依托瞄準技術具有設備組成簡單、自動化程度高、操作流程簡化、精度指標可靠的優勢,可以滿足中國航天無人值守發射的應用需求,為中國航天事業發展提供有力支撐,在未來大型運載火箭上有廣闊的應用前景。
[1] 肖錫珙. 發射技術(中)[M]. 北京: 宇航出版社, 1990.
XIAO Xihong. Launch technology(middle)[M]. Beijing: China Astronautic Publishing House, 1990.
[2] 賀長水, 解英梅, 李朝陽, 等. 新一代運載火箭扭轉?偏擺同步測量技術研究[J]. 導彈與航天運載技術, 2017(1): 65-69.
HE Changshui, XIE Yingmei, LI Zhaoyang, et al. Synchronous measurement of torsion and deflection for new generation launch vehicle[J]. Missiles and Space Vehicles, 2017(1): 65-69.
[3] 王小軍, 徐利杰. 我國新一代中型高軌運載火箭發展研究[J]. 宇航總體技術, 2019, 3(5): 1-9.
WANG Xiaojun, XU Lijie. Research on the development of new generation medium high-orbit lauch vehicle in China[J]. Astronautical Systems Engineering Technology, 2019, 3(5): 1-9.
[4] 彭蓉, 嚴恭敏, 秦永元. 箭載捷聯慣導系統水平自對準的兩種實用方法[J]. 中國慣性技術學報, 2009, 17(4): 428-435.
PENG Rong, YAN Gongmin, QIN Yongyuan. Two practical methods of autonomous leveling alignment for launch vehicle SINS[J]. Journal of Chinese Inertial Technology, 2009, 17(4): 428-435.
[5] 裴忠海, 余薛浩, 王鵬, 等. 運載火箭捷聯慣組全自動對準技術應用研究[J]. 上海航天, 2018, 5(35): 110-115.
PEI Zhonghai, YU Xuehao, WANG Peng, et al. Application of autonomous alignment for strapdown inertial measurement unit on launch vehicle[J]. Aerospace Shanghai, 2018, 5(35): 110-115.
[6] 秦永元. 卡爾曼濾波與組合導航原理[M]. 西安: 西北工業大學, 1998.
QIN Yongyuan. Theory of Kalman filer and integrated navigation[M]. Xi?an: Northwest Polytechnical University Press, 1998.
[7] 張宗麟. 慣性導航與組合導航[M]. 北京: 航空工業出版社, 2000.
ZHANG Zonglin. Inertial navigation and integrated navigation[M]. Beijing: Aviation Industry Press, 2000.
[8] 程向紅, 萬德鈞, 仲巡. 捷聯慣導系統的可觀測性和可觀測度的研究[J].東南大學學報, 1997, 27(6): 6-10.
CHENG Xianghong, WAN Dejun, ZHONG Xun. Study on observability and its degree of strapdown inertial navigation system[J]. Journal of Southeast University, 1997, 27(6): 6-10.
[9] 王新龍. 慣性導航基礎[M]. 西安: 西北工業大學出版社, 2013.
WANG Xinlong. Fundamentals of inertial navigation[M]. Beijing: Northwestern Polytechnical University Press, 2013.
Application of Unsupported Aiming Technology in the Establishment of Launch Vehicle Initial Position
FAN Yi, HE Huan, LIU Congcong, SONG Xiaoyan
(Beijing Institute of Space Launch Technology, Beijing, 100076)
An unsupported aiming method was proposed based on the combination of laser gyro strap down inertial measurement unit and collimator for unattended aim of large-scale launch vehicle, obtain the north reference through the autonomous north finding of the laser inertial unit, and then measure deviation between the inertial unit prism of the launch vehicle and the line of the returning beam, The data is included and calculated, and the initial position is finally obtained. The unsupported aiming technology is simple, automatic, optimized and reliable. It has a aiming error not greater than 2′. The technology meet the requirements of space launch and can be used as a reference for the aiming method of the future large-scale launch vehicle.
launch vehicle; unsupported aiming; laser gyro strap down inertial measurement unit
2097-1974(2023)02-0071-06
10.7654/j.issn.2097-1974.20230214
V556
A
2022-10-18;
2023-03-29
范 毅(1978-),男,高級工程師,主要研究方向為光電與精密儀器設計。
何 歡(1978-),男,高級工程師,主要研究方向為電子電氣儀器設計。
劉聰聰(1978-),男,高級工程師,主要研究方向為地面發射技術設計。
宋小艷(1980-),女,高級工程師,主要研究方向為光學精密儀器設計。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00