襟翼形式對撲翼獲能特性影響的對比分析
2023-06-16 08:42:32孫曉晶
空氣動力學學報 2023年5期
關鍵詞:效率
張 剛,孫曉晶,*
(1. 上海理工大學 能源與動力工程學院,上海 200093;2. 上海市動力工程多相流動與傳熱重點實驗室,上海 200093)
0 引 言
為了應對全球氣候變化,實現經濟與生態環境的高質量可持續發展,我國大力發展新型能源,加快推進能源向綠色低碳轉型。撲翼作為一種可從流體中獲取能量且結構簡單、環境友好的新型獲能裝置[1],近些年受到了研究人員的關注。1981 年Mckinney[2]提出撲翼機的概念并進行了初步實驗,此后又有許多研究者對撲翼的特性進行了詳細研究。Kinsey等[3-4]探究了空間排列方式對撲翼獲能的影響,指出串聯布置撲翼有達到高獲能效率的潛能。Simpson[5]通過水槽實驗探究了不同運動參數對撲翼獲能特性的影響,并進一步闡釋了撲翼的獲能機理。Wang 等[6]也探究了撲翼幾何參數,如翼型厚度、彎度、最大厚度位置等,對振蕩水翼獲能特性的影響。Zhu[7]對縮減頻率這一參數進行了系統探究,指出撲翼的獲能效率最初隨著縮減頻率單調增加,達到峰值后,隨著頻率的進一步增大,獲能效率急劇降低。
近年來,為進一步提高撲翼獲能效率,主被動控制技術在撲翼上的應用越來越受人們關注。被動控制技術有格尼襟翼[8]、渦發生器[9]等。Zhu等[10]在撲翼不同位置處安裝格尼襟翼并進行了數值模擬研究,結果表明安裝位置越接近撲翼尾部,格尼襟翼對撲翼獲能效率的提升效果越好。Xie 等[11]通過數值模擬的方式探究了格尼襟翼高度對撲翼獲能特性的影響,發現當襟翼高度近似為0.003c時,撲翼獲能效率的提升幅度最佳。上述研究表明格尼襟翼對撲翼獲能效率的提升效果主要是針對低中縮減頻率工況,而高縮減頻率工況下的提升效果并不明顯,甚至獲能效率在一定程度會有所下降,只能針對特定狀態實施控制。主動控制技術包括環量控制[12]、合成射流[13]、尾緣襟翼[14-15]等。Zhou等[16]提出了一種帶尾緣襟翼的撲翼模型,并通過數值模擬的方法證明了當尾緣襟翼長度取0.33c、翼縫寬度取0.001c時,撲翼獲能效率的提升效果最好。周大明等[17]的研究結果表明翼型厚度會影響尾緣襟翼撲翼前緣渦的演化,進而影響獲能效率。Sun 等[18]指出尾緣襟翼的俯仰振幅和振蕩周期對撲翼獲能效率的提升有顯著影響。上述研究表明尾緣襟翼對撲翼獲能效率的提升效果主要是針對中高縮減頻率工況,而低縮減頻率工況下的效果并不明顯。
上述尾緣襟翼的研究主要集中在尾緣襟翼的長度、偏轉角度及翼縫寬度等方面,對于不同偏轉形式的尾緣襟翼在撲翼獲能上的應用,目前的研究十分有限。為進一步改善撲翼獲能的氣動特性,本文通過數值模擬方法,以NACA0015 對稱翼型作為研究對象,選取了4 種不同的尾緣襟翼偏轉形式,研究尾緣襟翼偏轉形式對撲翼獲能效率的影響,并揭示尾緣襟翼偏轉形式提高撲翼獲能特性的機理。同時本文還探究了尾緣襟翼與格尼襟翼兩種不同襟翼控制方式對撲翼獲能性能的影響,詳細地對比了兩種控制方式提高撲翼獲能特性的不同機理,找尋較優的可提升撲翼獲能器性能的控制方式。
1 計算模型與驗證
1.1 撲翼運動模型
圖1 為撲翼的升沉運動和俯仰運動模型示意圖。其中,c為翼型弦長;U∞為來流速度;h(t)是翼型在豎直方向上的位移;h0代表升沉幅值;θ(t)為俯仰角度,表示來流方向與翼型弦線方向的夾角;θ0代表俯仰幅值;d為撲翼掃掠面積,在二維中即為翼型尾緣掃掠高度。
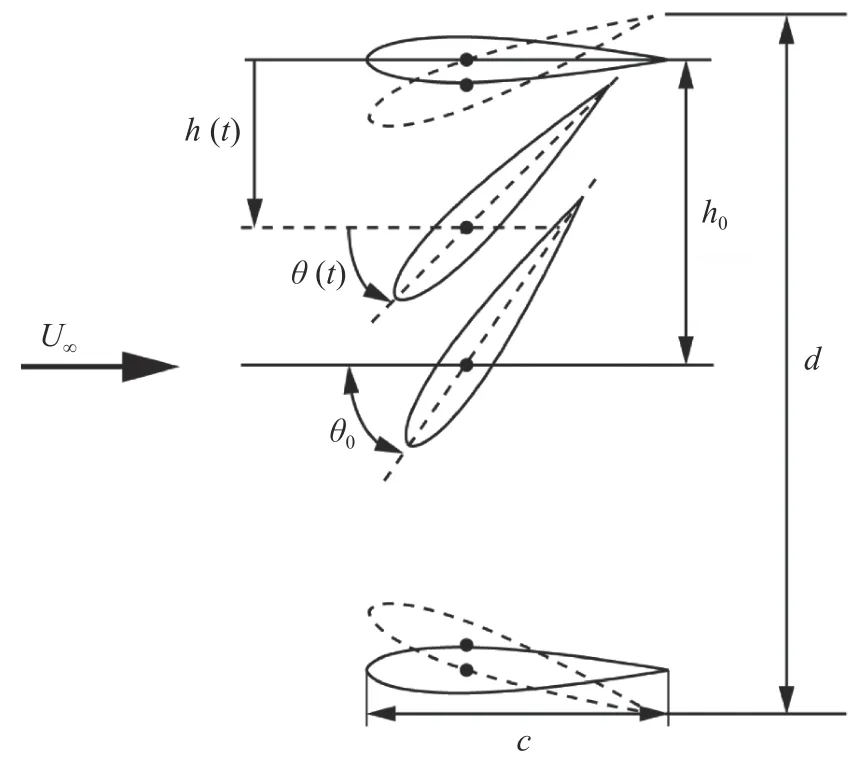
圖1 撲翼運動模型示意圖Fig. 1 Sketch of the heave and pitch motions of a flapping foil
撲翼升沉和俯仰運動的運動方程式可分別表示為:
其中,f為撲翼俯仰頻率,t為時間,φ為升沉運動與俯仰運動之間的相位角。本文取相位角φ= 90°,此時運動方程又可表示為:
所以,撲翼瞬時升沉速度Vy(t)與撲翼瞬時俯仰角速度ω(t)為:
流體作用于撲翼的力包括兩部分,分別是升沉力Y和俯仰力矩M。因此平均獲能功率系數為無量綱化的單個周期的升沉力做功PY與俯仰力矩做功Pθ之和[1,19-20]:
式中,為平均升沉力功率系數;為平均俯仰力矩功率系數;CY為升沉力系數,為俯仰力矩系數,為流體密度;T為翼型撲動周期。
一個周期內撲翼從流體中提取的能量與來流中蘊含的總能之比即為撲翼獲能效率η:
本文所提出的帶格尼襟翼(被動式)撲翼形式示意圖見圖2。格尼襟翼是一種典型的被動控制技術,具有結構簡單、無需額外的能量輸入等特點。圖中,格尼襟翼位于NACA0015 對稱翼型的尾端,垂直于翼型的中心線,lg為格尼襟翼長度。由于沒有額外的轉動機構,格尼襟翼撲翼獲能效率η依然采用公式(6)計算。本文所提出的另一種帶尾緣襟翼(主動式)撲翼形式示意圖見圖3。尾緣襟翼作為一種常見的主動控制方式,目前在單一翼型及撲翼上已有相關的應用研究。圖中,β0為尾緣襟翼偏轉角度幅值,lt為尾緣襟翼長度,w為翼縫寬度,翼型采用NACA0015 對稱翼型。
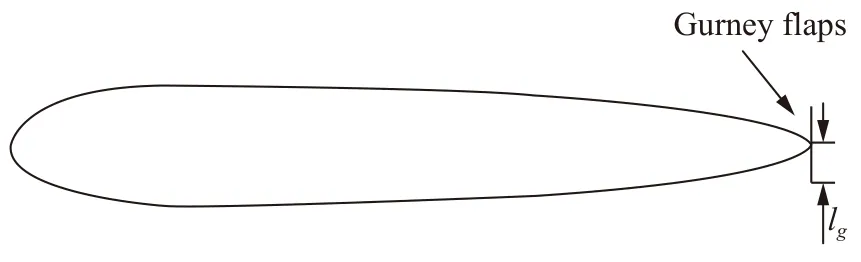
圖2 帶格尼襟翼(被動式)撲翼形式示意圖Fig. 2 Sketch of a flapping foil with passive Gurney flaps
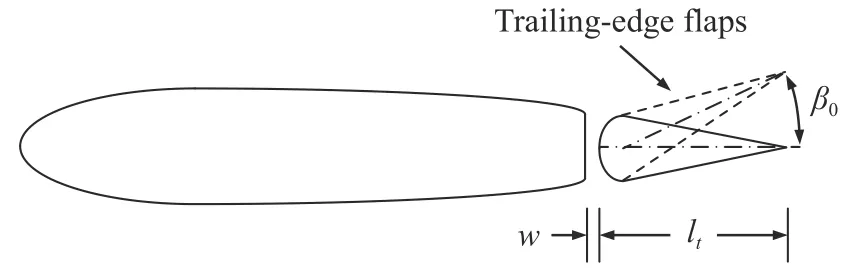
圖3 帶尾緣襟翼(主動式)撲翼形式示意圖Fig. 3 Sketch of a flapping foil with active trailing-edge flaps
對于尾緣襟翼撲翼,由于附加了尾緣襟翼自身的俯仰運動,因此在計算撲翼的總獲能效率時,其俯仰運動對自身俯仰軸產生的俯仰力矩做功也應一并計入。定義尾緣襟翼的俯仰力矩功率系數為CPβ,計算公式如下[16,18]:
其中,CMt為尾緣襟翼俯仰力矩系數,尾緣襟翼瞬時俯仰力矩系數Mt為尾緣襟翼偏轉軸的俯仰力矩,Mt(t)為尾緣襟翼偏轉軸的瞬時俯仰力矩;ωt(t)為尾緣襟翼瞬時偏轉角速度,ωt(t)=2πfβ0cos(2πft)。故尾緣襟翼撲翼的獲能效率計算公式為:
1.2 邊界條件與計算網格
本文構建的計算域如圖4 所示。采用結構?非結構的網格布局:計算域Ⅰ為非結構動網格域,半徑為3c,將內部翼型周圍的非結構動網格域設置為變形域,通過網格重構以實現撲翼的升沉、俯仰運動,其中對撲翼前緣與尾緣處的網格進行局部加密,使y+處于1 附近;計算域Ⅱ為靜止的結構網格域,半徑為30c,計算域Ⅰ和Ⅱ通過交界面(interface)連接,進出口邊界條件分別采用速度入口(velocity inlet)與壓力出口(pressure outlet)。方程的求解采用壓力-速度耦合算法;方程離散時,所有空間項和時間項均采用二階精度格式;計算中數值的處理采用雙精度;方程求解結果的收斂精度為1×10?6。
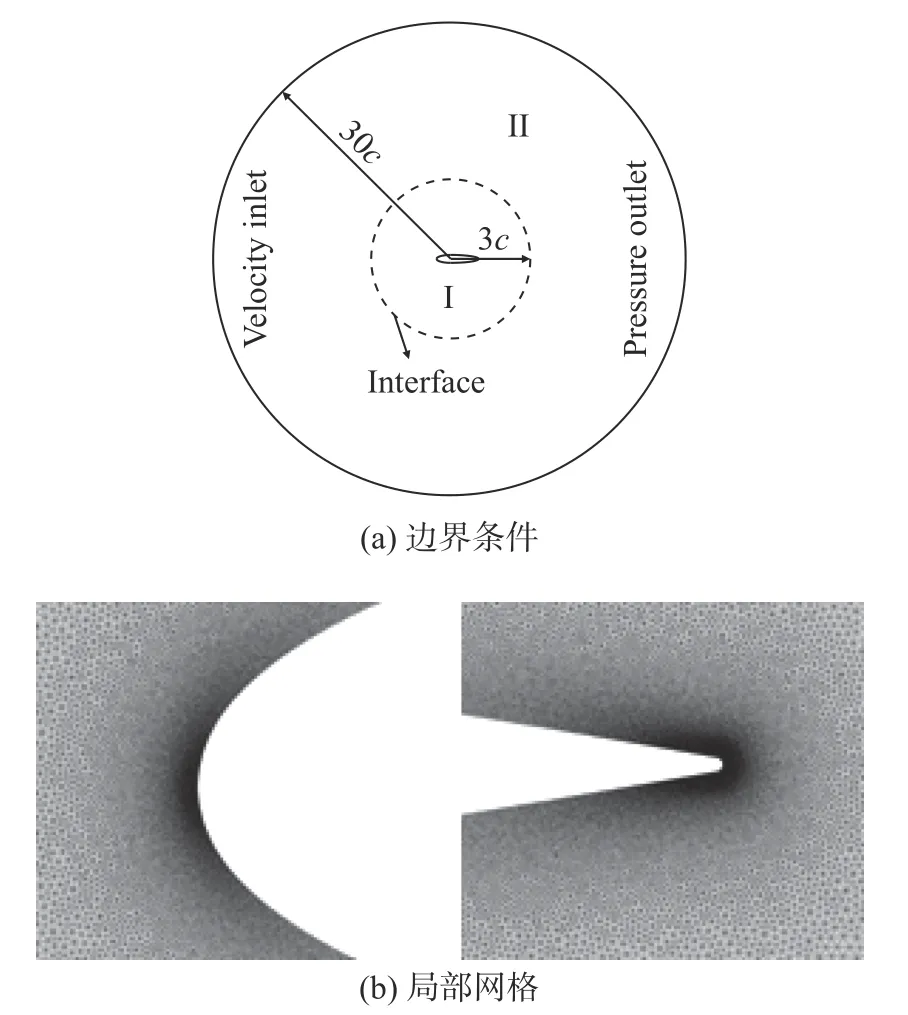
圖4 撲翼邊界條件及局部網格示意圖Fig. 4 Boundary conditions and local mesh of a flapping wing
2 網格模型與數值模型可靠性驗證
為保證數值模擬的準確性,在3 組工況參數下分別對網格量、時間步長與湍流模型對計算結果的無關性進行驗證。本文選用NACA0015 對稱翼型作為研究對象,工質為液態水。其中:弦長c= 0.24 m,俯仰軸位置xp/c= 1/3,來流速度U∞= 2 m/s,雷諾數Re=5×105,升沉幅值h0=c,俯仰幅值θ0= 75°,升沉運動與俯仰運動之間的相位角φ= 90°。在上述參數下進行了18 組數值模擬,驗證結果如表1。從表1 中可以看出,當網格量取2×105、時間步長取T/1500 時,可以在耗時較少的情況下得到精度較高的計算結果。對于4 種湍流模型對撲翼獲能的影響,可以從兩個方面進行考慮:首先,從獲能效率來看,不同湍流模型對獲能效率的影響較小,四種湍流模型之間獲能效率相對誤差均小于1%;其次,不同湍流模型下撲翼的最大升沉力系數平均水平力系數以及最大俯仰力矩系數之間的相對誤差也小于1%。考慮到計算精度及資源消耗,當網格數取2×105、時間步數取T/1500、湍流模型取Spalart-Allmaras(S-A)時,可在耗時較少的情況下得到精度較高的計算結果,因此將其作為后續模擬計算的基準。
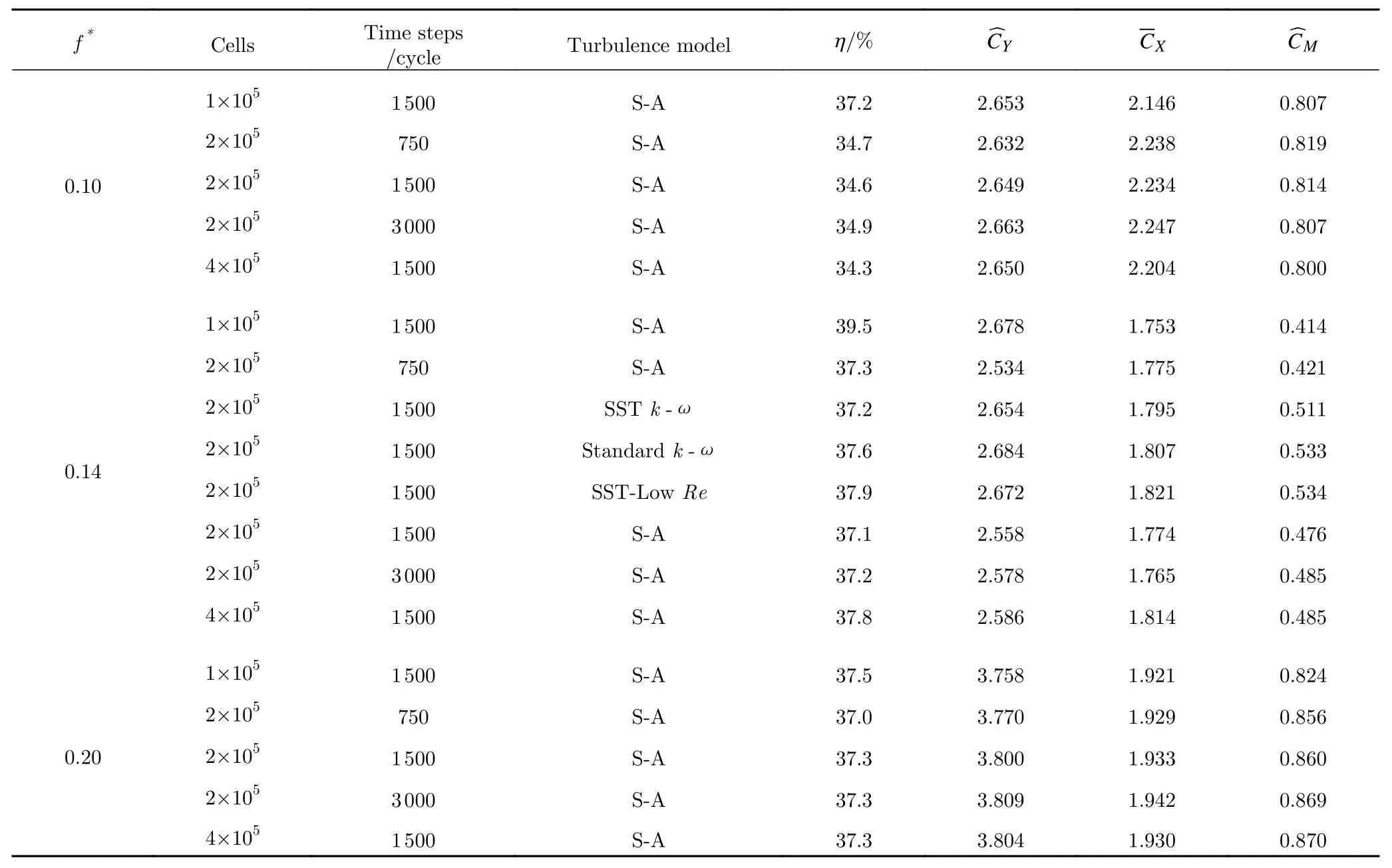
表1 網格數目、時間步數及湍流模型無關性驗證Table 1 Sensitivity studies of mesh, time step and turbulence model
為了充分驗證本文數值模型的可靠性與結果的準確度,首先采用經典文獻[21]中Kinsey 的實驗模型對傳統撲翼獲能特性進行模擬,并以文獻[21]中的實驗數據為依據進行誤差分析;然后將本文得到的數值結果與文獻[3、22、23]中Kinsey、He 的數值模擬結果進行對比分析,如圖5 所示。由圖可見,本研究的升沉力系數模擬結果與Kinsey、He 的模擬結果十分接近,同時獲能效率也與Kinsey、He 的二維模擬結果較為接近。綜上,模擬所采用的網格及計算方法等可以認為是有效的。
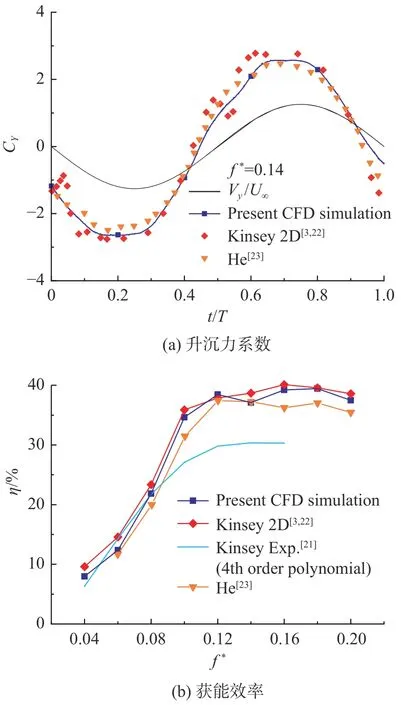
圖5 本文數值模擬結果與文獻中的實驗及數值結果對比Fig. 5 Comparison between present CFD simulations and published results
3 結果與討論
3.1 尾緣襟翼偏轉形式對撲翼獲能的影響
本文選取了4 種不同的尾緣襟翼偏轉形式,即向壓力面連續偏轉式(towards pressure side, TP)、向吸力面連續偏轉式(towards suction side, TS)、向壓力面偏轉-靜止-偏轉式(oscillating-static-oscillating, OSO)以及靜止-向壓力面偏轉-靜止式(static-oscillating-static,SOS),以研究尾緣襟翼偏轉形式對撲翼獲能效率的影響。4 種偏轉形式的運動方程分別如下:
TP 式:
TS 式:
OSO 式:
本文尾緣襟翼具體參數選取如下:偏轉角度幅值β0= 30°,襟翼長度與翼型弦長之比lt/c= 0.33,翼縫寬度與弦長比w/c= 0.001,縮減頻率的范圍取0.08~0.22;運用二維數值模擬計算4 種偏轉形式的尾緣襟翼撲翼獲能效率,結果如圖6 所示。可以看出,襟翼向壓力面偏轉的控制策略的獲能效果明顯優于向吸力面偏轉的情況。其中,向吸力面偏轉導致了撲翼的獲能效率隨縮減頻率增大而快速降低,在高縮減頻率下則出現了負效率的情況,意味著撲翼的受力方向發生了改變,從獲能狀態轉為推進狀態;而向壓力面偏轉的形式中以連續偏轉的TP 式效果最優。本文選取4 組控制策略在獲能效率差異較大的f* =0.18 工況下,考察尾緣襟翼偏轉形式對撲翼獲能特性的影響。

圖6 尾緣襟翼偏轉形式對撲翼獲能效率的影響Fig. 6 Effect of the deflection form of the trailing-edge flap on the energy-harvesting efficiency
4 種偏轉形式尾緣襟翼撲翼的升沉力系數、俯仰力矩系數及其功率系數如圖7 所示。從升沉力方面來看,尾緣襟翼向壓力面偏轉時撲翼受到的升沉力遠大于向吸力面偏轉所受的升沉力;OSO 式與SOS 式則均在其偏轉時刻內使撲翼升沉力得到了提高。由于SOS 式襟翼偏轉時刻與升沉速度最大時刻(t/T=0.25、0.75)重合度較高,故其升沉力做功高于OSO式;而TP 式全程均在向壓力面偏轉,因此采用該種方式偏轉的撲翼的升沉力最高、做功最多。從俯仰力矩來看,襟翼向吸力面偏轉有利于提高俯仰力矩方向與俯仰角速度的同步性,故向吸力面偏轉時撲翼的俯仰力矩產生正功最多;三種向壓力面偏轉的控制策略則均會使俯仰力矩產生負功,其中OSO 式由于在撲翼俯仰階段(t/T= 0、0.50)使襟翼快速偏轉,因此產生了最大的俯仰力矩負功。總體來看,由于撲翼獲能過程中升沉力做功占比更大,因此向壓力面偏轉更有利于提升撲翼獲能效率,其中連續偏轉的TP 式控制策略最優。
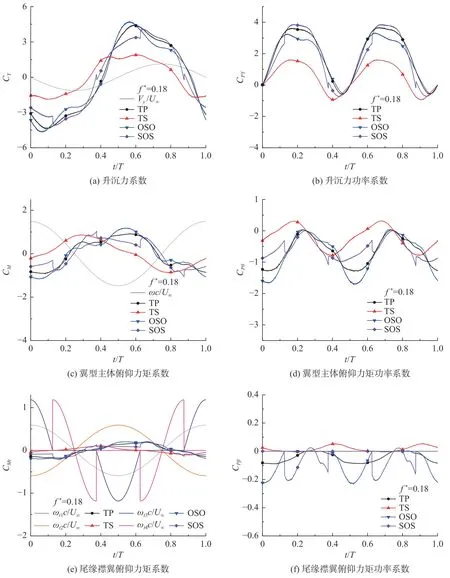
圖7 不同尾緣襟翼偏轉形式的撲翼在一個運動周期內的升沉力、俯仰力矩及功率系數曲線(f* = 0.18)Fig. 7 Variations of heaving forces, pitching moments, and energy-harvesting coefficients of a flapping wing with different deflection forms of the trailing-edge flap in one motion cycle (f* = 0.18)
由圖7 可知,撲翼的升沉力系數、俯仰力矩系數及其功率系數曲線呈對稱分布,因此只需研究撲翼在t/T= 0~0.5 時段內的升沉俯仰運動即可。故下面選取俯仰力矩與升沉力做功較大的t/T= 0.05、0.25 時刻,結合撲翼的渦量、壓力云圖分析襟翼偏轉形式對流場的影響。如圖8,t/T= 0.05 時,TP 式與OSO 式襟翼都向壓力面偏轉,對壓力面流體起到了阻滯作用,使得尾緣上表面處產生了較大的壓力,阻礙了撲翼此時的逆時針俯仰運動,此時兩種方式的壓強分布面積最大;TS 式由于襟翼向吸力面偏轉,減緩了撲翼下表面流體的流速,削減了上下表面阻礙俯仰運動進行的壓力分布,有利于俯仰力矩產生正功;SOS 式襟翼相對撲翼主體保持靜止,因此此時沒有明顯的控制效果。t/T= 0.25 時,TS 式向吸力面偏轉,使得吸力面尾緣處產生了明顯的正壓區,破壞了翼型兩側有利于升沉運動的壓力分布,因此此時升沉力最小;其余三種控制方式此時的襟翼都處于壓力面偏轉狀態,有利于提升撲翼兩側壓差。通過式(15)可知,OSO 式襟翼的偏轉角度在t/T= 0.125 時刻即已達到幅值狀態,但其壓差分布明顯弱于其余兩者,這說明了可能即使偏轉角度提早達到幅值也無益于長久地保持升沉力的幅值狀態。
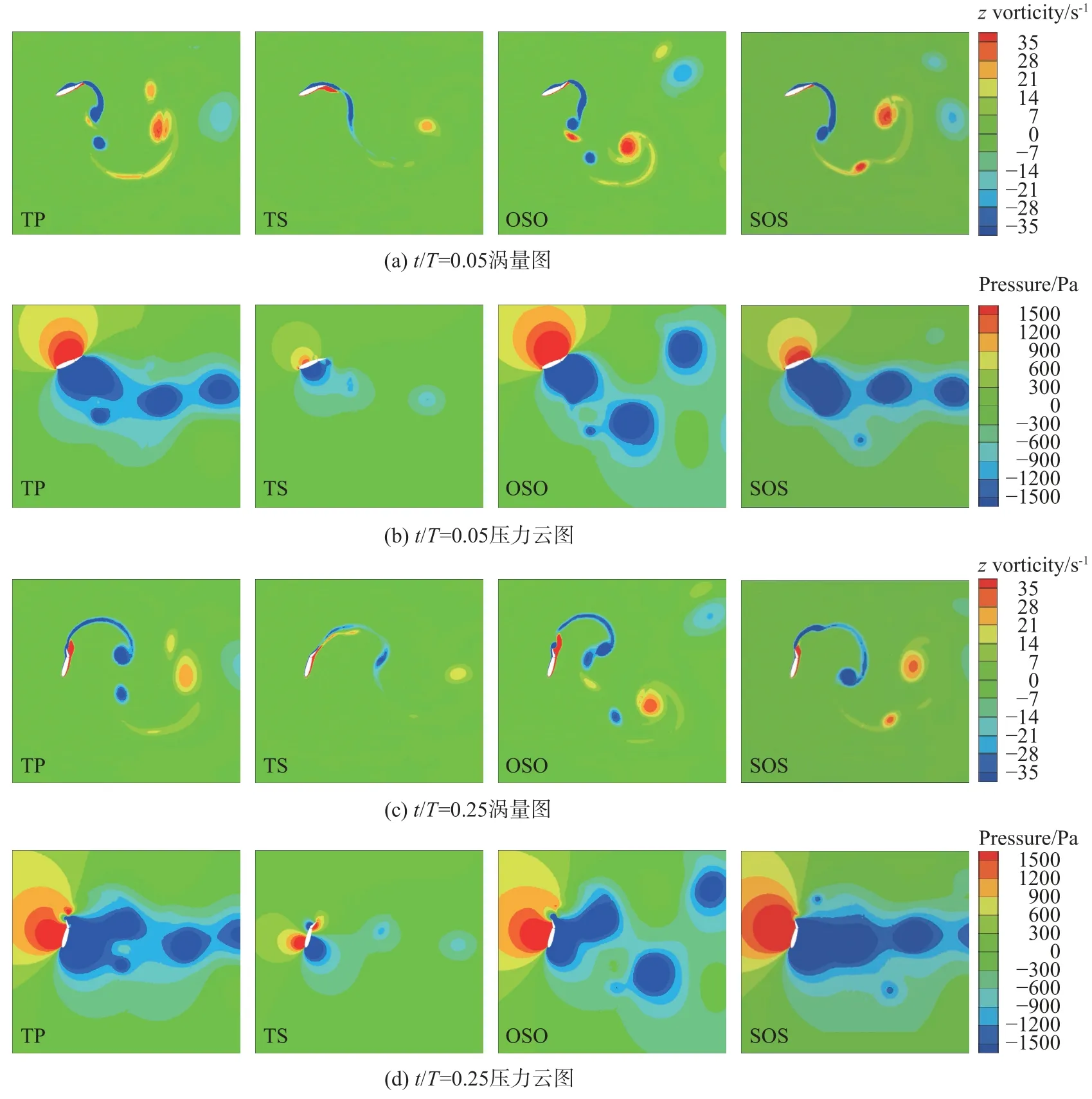
圖8 一個運動周期中不同尾緣襟翼偏轉形式下撲翼的渦量及壓力云圖(f* = 0.18)Fig. 8 Instantaneous vorticity and pressure contours around flapping wings with different deflection forms of the trailing-edge flap in one motion cycle (f* = 0.18)
3.2 兩種襟翼形式對撲翼獲能影響的對比分析
本節主要探討尾緣襟翼和格尼襟翼兩種襟翼控制方式對撲翼獲能性能的影響。尾緣襟翼(主動式)撲翼模型如圖3 所示,選取偏轉形式為TP 式的尾緣襟翼,尾緣襟翼偏轉角度幅值β0= 30°,襟翼長度與翼型弦長之比lt/c= 0.33,翼縫寬度與弦長之比w/c=0.001。格尼襟翼(被動式)撲翼模型如圖2 所示,格尼襟翼長度與翼型弦長之比lg/c= 0.02。縮減頻率范圍取0.08~0.22,進行二維數值模擬。
圖9 給出了不同縮減頻率下尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼獲能效率的對比圖。從圖中可以看出,尾緣襟翼撲翼獲能效率的峰值明顯高于格尼襟翼撲翼與原始撲翼獲能效率的峰值。在低縮減頻率下,相較于原始撲翼,格尼襟翼撲翼的獲能效率有所提升,而尾緣襟翼撲翼的獲能效率出現了輕微的下降;在中縮減頻率下,尾緣襟翼撲翼與格尼襟翼撲翼的獲能效率均得到提升,且提升效果基本一致。在高縮減頻率下,尾緣襟翼撲翼的獲能效率進一步得到提升,而格尼襟翼撲翼的提升效果不明顯,甚至隨著縮減頻率的提高,撲翼的獲能效率出現了一定程度上的降低。下文選取縮減頻率f* = 0.10、0.18 作為特征頻率工況,分析不同縮減頻率下尾緣襟翼和格尼襟翼對提升撲翼獲能效率的不同機理。
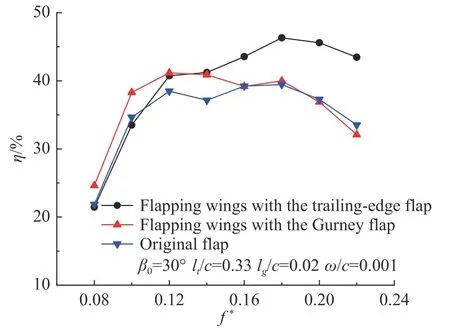
圖9 尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼獲能效率的對比圖Fig. 9 Comparison of energy-harvesting efficiency between flapping wings with the trailing-edge flap,gurney flap, and original flap
3.2.1 縮減頻率f* = 0.10
圖10 為縮減頻率f* = 0.10 時,尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼的升沉力系數、俯仰力矩系數及其功率系數在一個運動周期內的變化曲線。從升沉力方面來看,尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼的升沉力與升沉速度保持較好的同步性,因此升沉力在一個運動周期內做正功。在整個運動周期內,格尼襟翼撲翼受到的升沉力大于尾緣襟翼撲翼與原始撲翼的升沉力,因而格尼襟翼撲翼升沉力做功大于尾緣襟翼撲翼與原始撲翼升沉力做功。從俯仰力矩來看,尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼的俯仰力矩在3/4 個周期內與俯仰角速度不同步,并且不同步時間段內尾緣襟翼撲翼的俯仰力矩大于格尼襟翼撲翼與原始撲翼的俯仰力矩,因此一個運動周期內尾緣襟翼撲翼負功貢獻更多。結合升沉力做功系數與俯仰力矩做功系數來看,格尼襟翼撲翼的獲能功率系數更大。

圖10 尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼在一個運動周期內的升沉力、俯仰力矩及功率系數曲線圖(f* = 0.10)Fig. 10 Variations of heaving forces, pitching moments, and energy-harvesting coefficients of flapping wings with the trailing-edge flap,Gurney flap, and original flap in one motion cycle (f* = 0.10)
由圖10 還可知,撲翼的升沉力系數、俯仰力矩系數及其功率系數曲線呈對稱分布,因此只需研究撲翼在t/T= 0~0.5 時段內的升沉俯仰運動即可。圖11 和圖12 分別為縮減頻率f* = 0.10 時,一個運動周期內尾緣襟翼撲翼、格尼襟翼撲翼和原始撲翼在不同時刻時,瞬態流場的渦量云圖對比和壓力云圖對比。當t/T= 0.15 時,與原始撲翼相比,格尼襟翼撲翼上下表面的正壓區和負壓區均有所增強,并且由于格尼襟翼的存在,在壓力面尾部出現了小范圍負壓區;而尾緣襟翼撲翼兩側有更大范圍的正壓區和負壓區,升沉力有所提高,并且在尾緣襟翼處開始出現分離渦。當t/T= 0.25 時,撲翼繼續下俯運動,格尼襟翼撲翼尾部的負壓區基本消失,升沉力得到提高;與原始撲翼相比,尾緣襟翼撲翼因為撲翼俯仰角和尾緣襟翼偏轉角同時達到最大,襟翼處出現了明顯的分離渦,而尾緣襟翼向壓力面的連續偏轉,使壓力面的尾部出現負壓區,在一定程度上削弱了升沉力。當t/T= 0.35 時,與原始撲翼相比,格尼襟翼撲翼尾部的分離渦強度更大,并且襟翼的存在增大了翼型上下兩側的壓力差,從而導致升沉力所做的正功增加,這一點可以在圖10 中得到驗證。而對于尾緣襟翼撲翼,由于襟翼偏轉角減小,尾緣壓力面的負壓區減小,從而使升沉力和俯仰力矩均得到提高,并且分離渦開始出現脫落的跡象。當t/T= 0.45 時,撲翼將下俯至水平位置,俯仰速度處于峰值,俯仰力矩做功占功率輸出的主要部分。與原始撲翼相比,格尼襟翼撲翼由于襟翼存在,卸除了翼型壓力面表面的負壓區,增強了升沉力做功。而尾緣襟翼撲翼因為襟翼偏轉角的持續減小,增大了翼型壓力面表面的負壓區,削弱了俯仰力矩產生的正功。

圖11 一個運動周期內尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼在不同時刻時瞬態流場的渦量云圖對比(f* = 0.10)Fig. 11 Temporal evolutions of vorticity contours around flapping wings with the trailing-edge flap, Gurney flap,and original flap in one motion cycle (f* = 0.10)
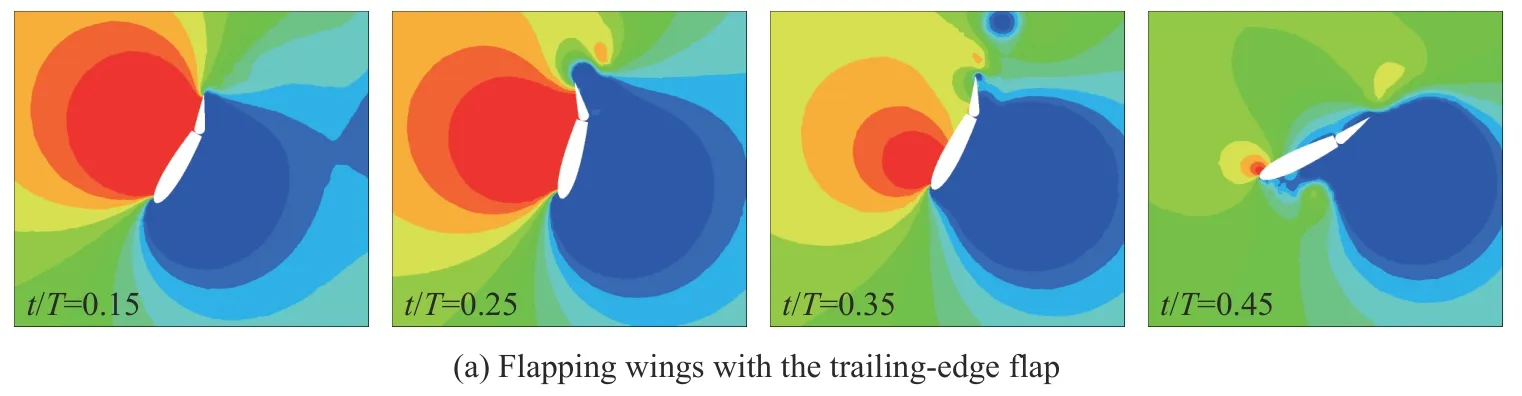
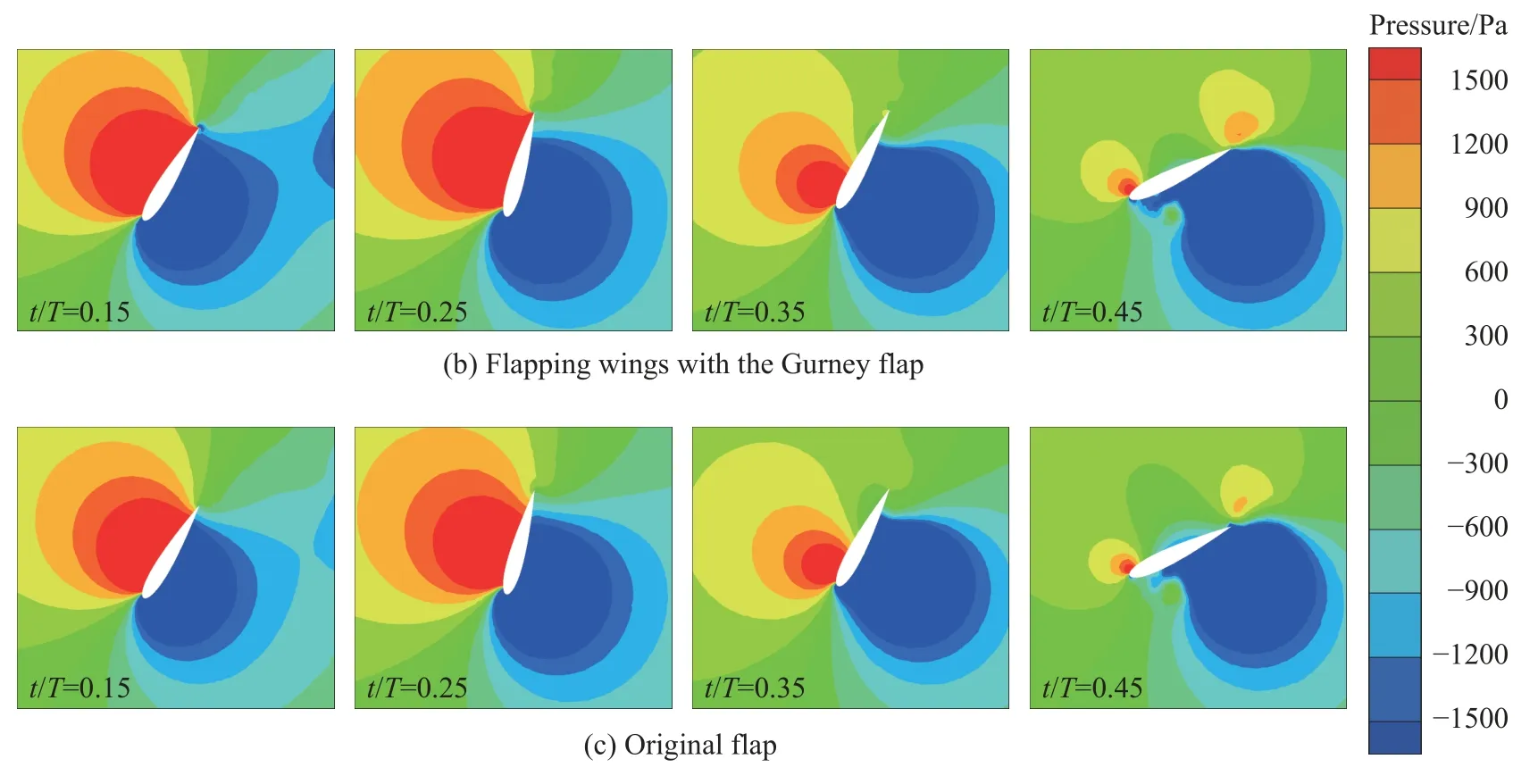
圖12 一個運動周期內尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼在不同時刻時瞬態流場的壓力云圖對比(f* = 0.10)Fig. 12 Temporal evolutions of pressure contours around flapping wings with the trailing-edge flap, Gurney flap,and original flap in one motion cycle (f* = 0.10)
3.2.2 縮減頻率f* = 0.18
圖13 為縮減頻率f* = 0.18 時,尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼的升沉力系數、俯仰力矩系數及其功率系數在一個運動周期內的變化曲線。從升沉力方面來看,尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼的升沉力在3/4 個周期內與升沉速度保持同步,因此升沉力在3/4 個周期內做正功;剩下的1/4 個周期,由于升沉力與升沉速度不同步,所以尾緣襟翼撲翼、格尼襟翼撲翼和原始撲翼均會產生負功。尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼的差異之處是尾緣襟翼撲翼較原始撲翼,升沉力產生的負功減少,而格尼襟翼撲翼較原始撲翼,升沉力產生的負功增加。這些差異的原因是尾緣襟翼增強了撲翼升沉運動與升沉力方向的同步性,而格尼襟翼撲翼則削弱了撲翼升沉運動與升沉方向的同步性。從俯仰力矩來看,尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼的俯仰力矩在一個運動周期內與俯仰角速度不同步,所以俯仰力矩始終做負功。尾緣襟翼撲翼與格尼襟翼撲翼的差異之處在于達到俯仰力矩峰值的時刻不一致,尾緣襟翼撲翼有兩個俯仰力矩峰值,導致一個周期內負功貢獻更多,又因為升沉力做功占功率輸出的主要部分,因此尾緣襟翼撲翼的獲能功率系數得到了提升。格尼襟翼撲翼雖然只有一個俯仰力矩峰值,但升沉力產生的負功更多,所以格尼襟翼撲翼的獲能功率系數沒有得到進一步提升。
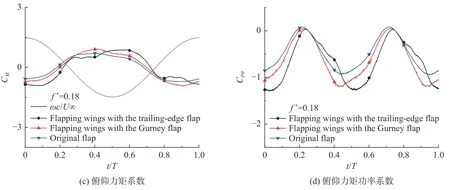
圖13 尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼在一個運動周期內的升沉力、俯仰力矩及功率系數曲線圖(f* = 0.18)Fig. 13 Variations of heaving forces, pitching moments, and energy-harvesting coefficients of flapping wings with the trailing-edge flap,Gurney flap, and original flap in one motion cycle (f* = 0.18)
圖14 和圖15 分別為縮減頻率f* = 0.18 時,一個運動周期內尾緣襟翼撲翼、格尼襟翼撲翼和原始撲翼在不同時刻時,瞬態流場的渦量云圖對比和壓力云圖對比。通過與圖11 和圖12 對比可知,格尼襟翼撲翼較原始撲翼渦量強度和壓強基本保持一致,這些流場特征印證了上文對格尼襟翼撲翼獲能效率沒有提升的做功系數曲線的分析。而對于尾緣襟翼撲翼,因為縮減頻率的提高,撲翼表面的渦量強度有所增強,從而導致了更大范圍的壓力區,所以尾緣襟翼撲翼獲能效率得到進一步提升。
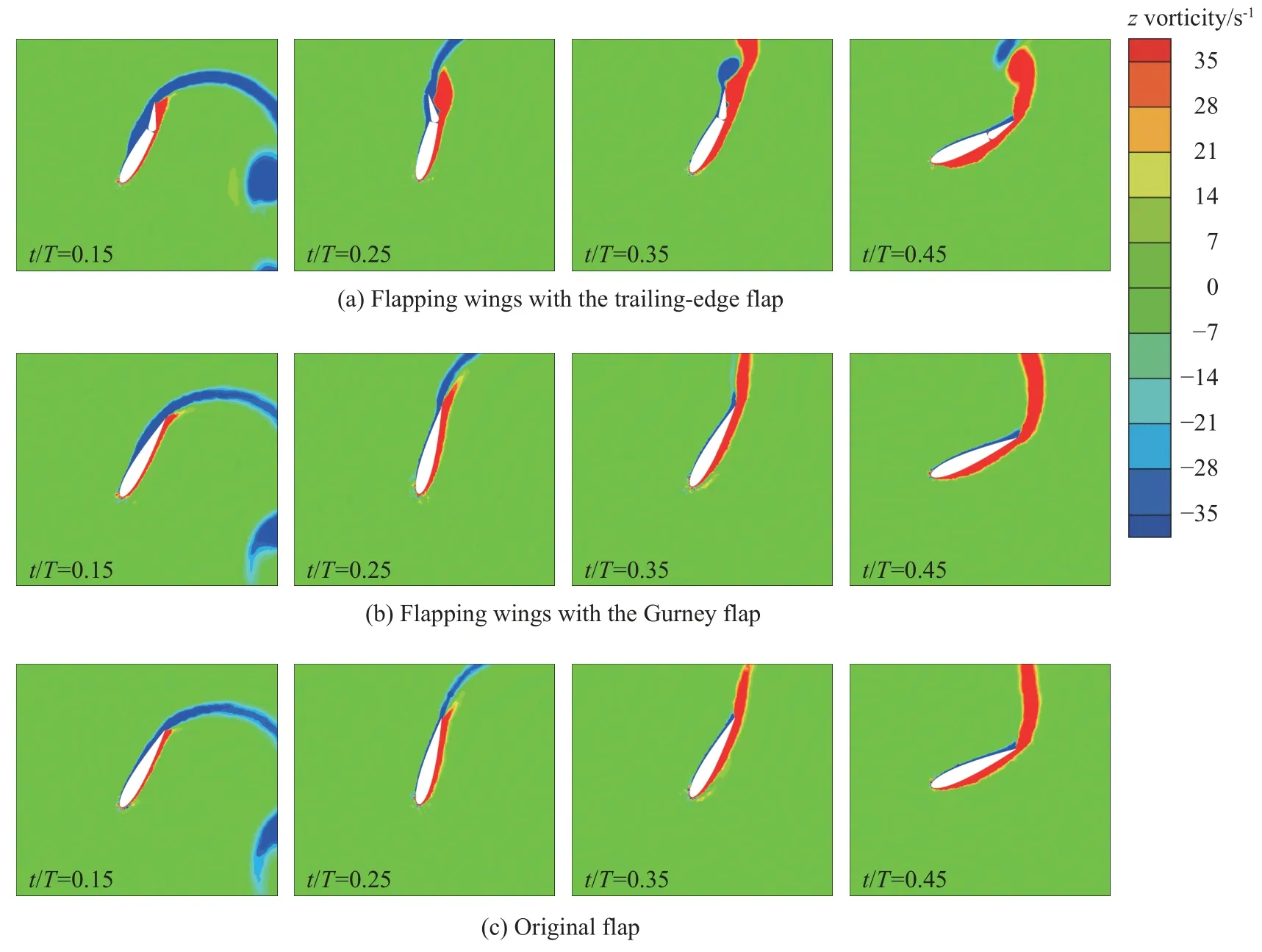
圖14 一個運動周期內尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼在不同時刻時瞬態流場的渦量云圖對比(f* = 0.18)Fig. 14 Temporal evolution of vorticity fields around flapping wings with the trailing-edge flap, Gurney flap,and original flap in one motion cycle (f* = 0.18)
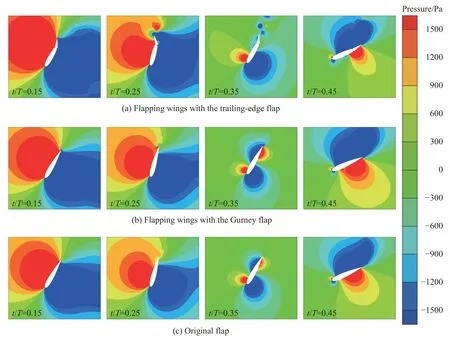
圖15 一個運動周期內尾緣襟翼撲翼、格尼襟翼撲翼與原始撲翼在不同時刻時瞬態流場的壓力云圖對比(f* = 0.18)Fig. 15 Temporal evolution of pressure contours around flapping wings with the trailing-edge flap,Gurney flap, and original flap in one motion cycle (f* = 0.18)
4 結 論
本文以NACA0015 對稱翼型為基礎,建立了尾緣襟翼撲翼獲能器和格尼襟翼撲翼獲能器模型,采用基于動網格技術的瞬態數值計算方法,在弦長c=0.24 m、來流速度U∞= 2 m/s、雷諾數Re= 5×105、升沉幅值h0=c、俯仰幅值θ0= 75°、升沉運動與俯仰運動之間相位角φ= 90°的參數工況下,結合撲翼的力與力矩系數、功率系數曲線的周期性變化,以及撲翼周圍渦量場和壓力分布,探討了不同尾緣襟翼偏轉形式對撲翼獲能特性的影響規律。同時本文還對比了尾緣襟翼與格尼襟翼兩種不同襟翼控制方式對撲翼獲能性能的影響。得到結論如下:
1)尾緣襟翼向壓力面偏轉的控制策略的獲能效果明顯優于向吸力面偏轉的情況,其中向吸力面偏轉導致了撲翼的獲能效率隨縮減頻率增大而快速降低,在高縮減頻率下則出現了負效率的情況,獲能效率大幅下降。
2)從升沉力和俯仰力矩兩個方面綜合來看,因為撲翼獲能過程中升沉力做功占比更大,因此尾緣襟翼向壓力面偏轉更有利于提升撲翼獲能效率,其中連續偏轉的TP 式控制策略最優。
3)格尼襟翼對撲翼的獲能效率提升效果主要體現在中低縮減頻率工況(f* = 0.08~0.14),在f* =0.12 時,與原始撲翼相比,獲能效率最大可提高到41.2%。隨著縮減頻率進一步增大,獲能效率逐漸與原始撲翼趨近。而尾緣襟翼對撲翼的獲能效率提升效果主要體現在中高縮減頻率工況(f* = 0.12~0.22),在f* = 0.18 時,與原始撲翼相比,獲能效率最大可提高到46.3%。
因此,在工程實際中需要根據設計工況下撲翼的運動頻率,采用合適的控制方法最大程度地提高這種裝置的風能、水流能捕獲能力。
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32
