基于互信息的異步電動機軸承故障特征選擇方法研究*
2023-06-05 00:49:40周智勇楊理華
艦船電子工程 2023年1期
劉 文 周智勇 蔡 巍 楊理華
(海軍潛艇學院 青島 266000)
1 引言
異步電動機故障類型主要包括軸承故障、定子匝間短路、轉子斷條和氣隙偏心等。其中,軸承故障占比最高,約占異步電動機故障統計的40%~50%。因此對異步電動機的軸承實施故障診斷具有重要的現實意義。
傳統的軸承故障診斷方法主要是依靠故障特征頻率進行判斷,但易受到其他高頻信號干擾,對使用環境有一定限制。近年來,數據驅動技術的發展,為電機軸承故障診斷提供了新思路,即通過電動機的運行數據分析軸承狀態,而運行數據的特征選擇正是該類診斷算法的核心內容。適當的特征選擇算法能夠對高維故障特征集進行有效降維,篩選得到與電機狀態高度相關的特征集,從而大幅降低故障診斷算法運行時間。
本文通過引入信息論中互信息的基本概念,以運行數據統計量與設備狀態的互信息為評價準則,提出基于異步電動機振動信號的軸承故障特征選擇算法。試驗表明:該算法能夠在降維條件下,有效篩選數據特征集,提高診斷效率。
2 互信息的基本概念
互信息以信息論為背景,能夠衡量兩個變量的相互依賴程度,表示兩個變量間共同擁有信息的含量[1]。下面對基于互信息的特征選擇算法涉及基本概念進行介紹。
概念1信息熵。信息熵是通過統計學的方法,反映隨機變量內部不確定程度的量,體現隨機變量所蘊含信息量的大小。假設X={x1,x2,…,xn} 為一個隨機變量,則其信息熵H(X)表達式為
其中,p(xi)為xi發生概率。
p(xi)在極限情況下,當隨機變量X中的變量均為x 時,p(xi)=1。此時信息熵H(X)=0,表明樣本集包含的信息量為零。
概念2條件熵。條件熵H(X|Y)表示在給定Y變量的條件下X變量的不確定程度,定義如下:
概念3互信息。對于兩個隨機變量X、Y,它們的互信息定義如下:
互信息還可以表示為
I(X;Y)=H(Y)-H(Y|X)
當X 與Y 相互獨立時,則H(Y|X)與H(Y)相等,此時I(X;Y)=0。
概念4相關性。假設Xm為待選特征集合,C為類標簽集合。相關性用于表征特征集中的特征與標簽集中的標簽的關聯程度,通過互信息I(Xm;C)直觀體現。I(Xm;C)越大,則特征向量與類標簽關聯度越高。
概念5冗余性。假設S 為已選擇的特征集合,則冗余性表示待選的特征向量與S 的相關性,同樣以互信息為衡量標準。
3 基于互信息的軸承故障特征選擇
3.1 特征選擇
數據驅動算法,是由電動機運行原始數據提取的統計特征,反映設備運行狀態。對應不同故障類別時,可將其特征劃分為強相關性特征、無關特征和冗余特征[2]。依據數據特征進行故障診斷時,高維數據特征集可以提高故障診斷的識別能力,但同時不可避免引入的計算冗余和非顯著信息,會降低后驗故障檢測和識別性能。因此,在數據驅動算法中進行特征選擇,其目的就是要按照某種評價原則,篩選出最具有代表性的特征量,排除無關特征和冗余特征,降低特征集維度,避免出現故障檢測效率低下和結果過擬合等問題。數據特征選擇的基本流程參見圖1。

圖1 數據特征選擇的基本流程圖
3.2 基于互信息的特征選擇
特征選擇即是在原有特征集中,篩選出強相關性的特征,形成一個新的集合,降低特征集維度,但又不過分減少信息量。數據特征選擇的選擇過程是通過評價準則來實現的,目前主要有主元分析法(Principle Component Analysis,PCA)、線性判別分析法(Linear Discriminate Analysis,LDA)等,但PCA不適用于處理非線性關系,LDA則會產生新的特征量,可解釋性差。而基于互信息的特征選擇算法以互信息為評價準則,能夠衡量變量間的相互依賴程度,提取有效特征,對非線性問題的處理也同樣適用。
基于互信息的特征選擇算法一般是通過遍歷特征集合,選擇與類標簽相關性最大的特征,形成新的集合,該方法稱為最大互信息算法(Mutual Information Maximum,MIM)。
假設F為原始特征集合,S為已選特征集合,Xm為待選特征集合,C為標簽集,則MIM 的評價準則為
JMIM(F,C)=I(fi;c)
通過遍歷F,尋找與C相關度最高的特征向量,放入S中,并從F中刪除;重復上述過程,直到找到m個最優特征向量。該方法計算量小,能夠很好地找到與類標簽高度相關的特征量,但沒有考慮到已選特征量xs與待選特征量xm之間的相關性。
基于MIM算法的不足,修改其評價準則為
即得到了最大相關最小冗余算法[3](Feature selection based on maximum-relevance and minimum-redundancy,mRMR)。
與MIM 算法不同,該方法引入了冗余度的概念,其評價準則分為兩部分,前半部分I(xm;c)為待選擇特征與類標簽的相關性,后半部分為待選擇特征與已選特征間的冗余度。通過遍歷F,找到與類標簽高度相關,同時與已選擇特征低冗余的特征向量,也即是使評價準則最大化的特征向量,放入S中,并從F中刪除,重復上述過程,直到找到m個最優特征向量。mRMR算法流程如圖2所示。
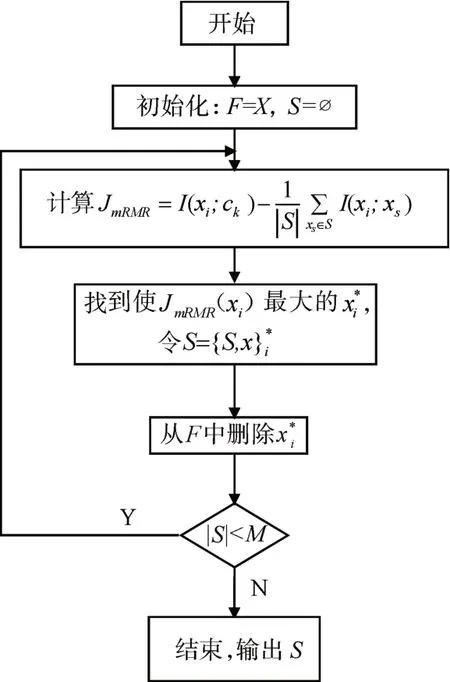
圖2 mRMR算法流程框圖
由圖2可見,mRMR 算法在計算冗余度時采用加權的方法,能夠實現評價準則的動態調整,使運算結果更加合理。
3.3 異步電動機軸承故障特征選擇
當異步電動機發生軸承故障時,其振動特性將發生改變,因此通過分析電機振動信號時域統計特征量可對軸承故障進行診斷。常用的時域統計特征包括方差(Variance,σ2)、均方根(Root mean square,RMS)、偏度(Skewness,Sk)、峰度(Kurtosis,Ku)、最大值(Maximum,Max)等,表1中列舉了本文中使用的13 種時域統計量及其計算公式,它們在故障診斷領域中得到廣泛使用[4~5]。
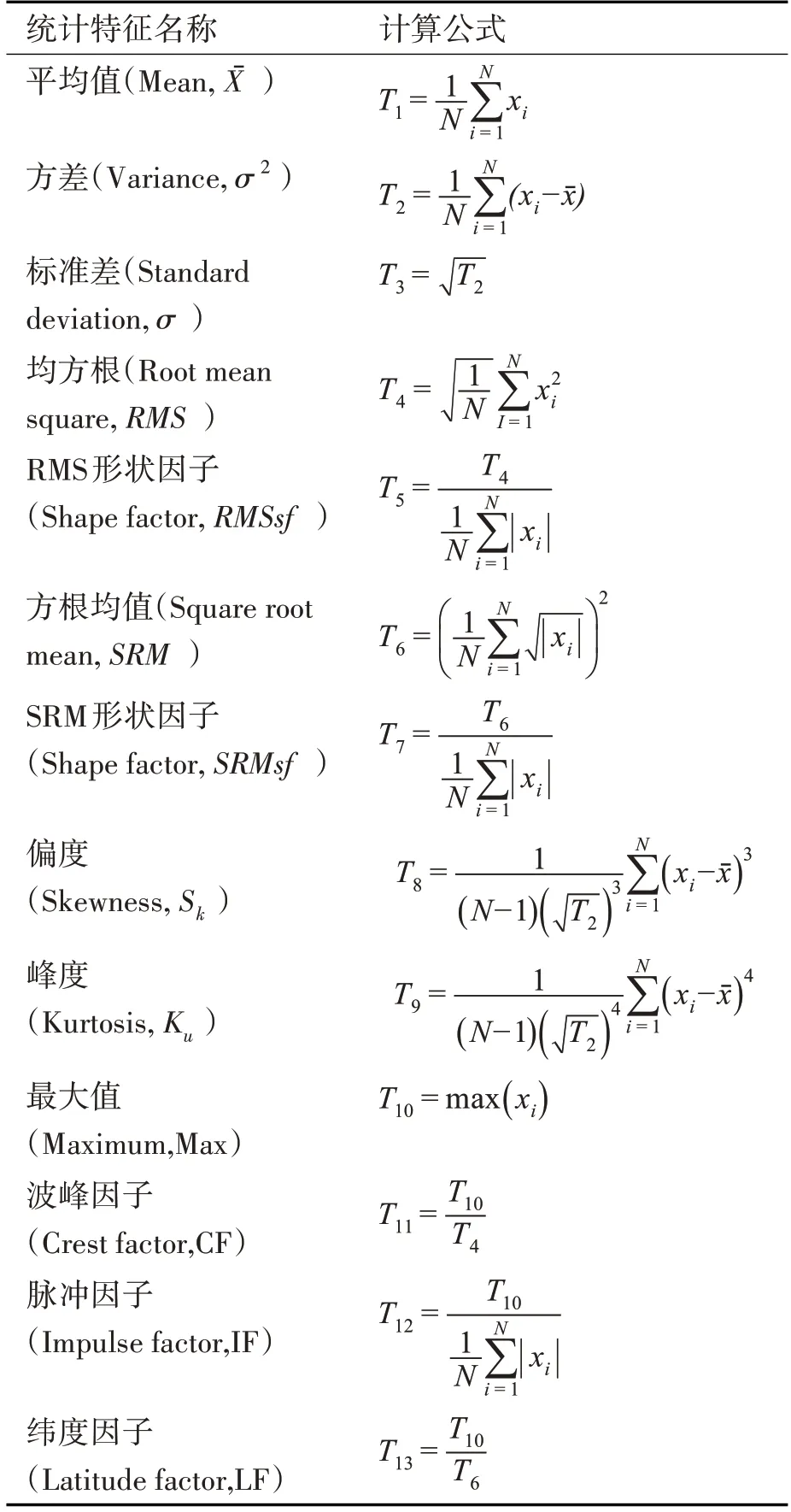
表1 時域統計特征及其計算公式
不同的統計特征量可以從不同角度反映異步電動機振動信號的變化趨勢,如方差和標準差可以用于描述振動信號數值的集中和分散程度;均方根可以反映振動信號的有效值;偏度能夠判定振動數據分布的不對稱程度及其方向;峰度能夠判定數據分布是更陡峭還是平緩。傳統的診斷方法可以根據某種統計量的變化程度判別軸承故障,但這種方法比較粗糙,且易受外界環境因素的影響。通過基于互信息的特征選擇算法,找到與類標簽相關度最高的那部分統計量,可以很好地解決該問題,且可避免計算冗余和結果過擬合。
對采集得到的振動信號按照表1中的公式提取13種時域統計特征量,形成原始特征集。從表1中可以看出各統計量的量綱各不相同,在圖3中以Sk1和Ku1為例,描繪了二者的幅值對比圖,可以明顯看出其幅值大小上存在明顯差異。基于上述問題,在進行互信息值計算前,首先需要對各統計量進行歸一化處理,以便得出更為準確的結論。區分健康和軸承故障兩種類標簽,分別計算各特征向量與類標簽的互信息值。通過mRMR算法,計算得到特征量與類標簽的相關度,并依照互信息大小排序。排名越靠前,則代表相關度越高且具有較低的冗余度。采用排名靠前的特征形成特征集,從而可在低數據維度條件下,對軸承故障進行診斷判別。
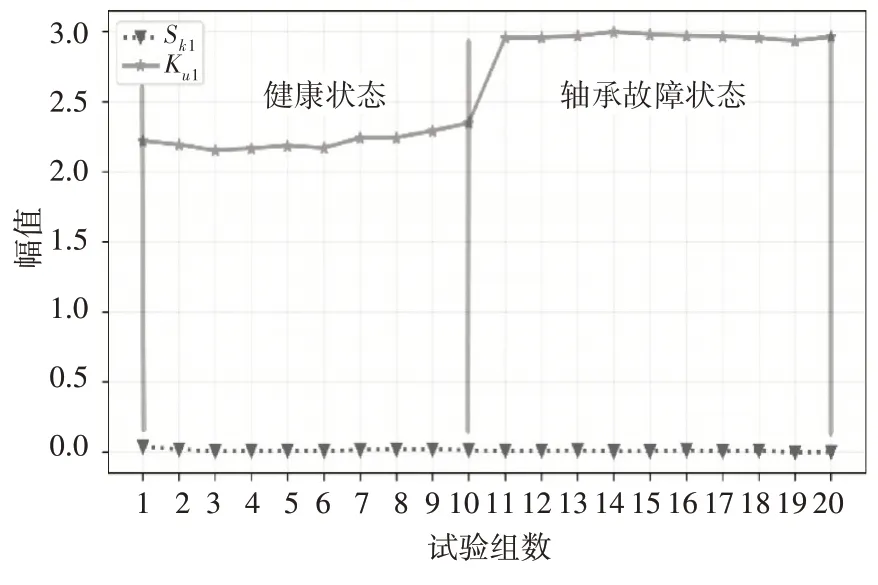
圖3 Sk1、Ku1 幅值對比圖
4 試驗驗證
4.1 試驗平臺
將本文算法在試驗平臺予以驗證。試驗平臺主要包括異步電動機、直流發電機、電阻負載箱、信號采集儀和上位機等。其中,異步電動機功率為7.5kW,型號Y132M-4;直流發電機與異步電動機同軸連接,作為拖動負載使用;直流發電機輸出連接電阻負載箱,從而實現功率調整。試驗裝置如圖4所示。
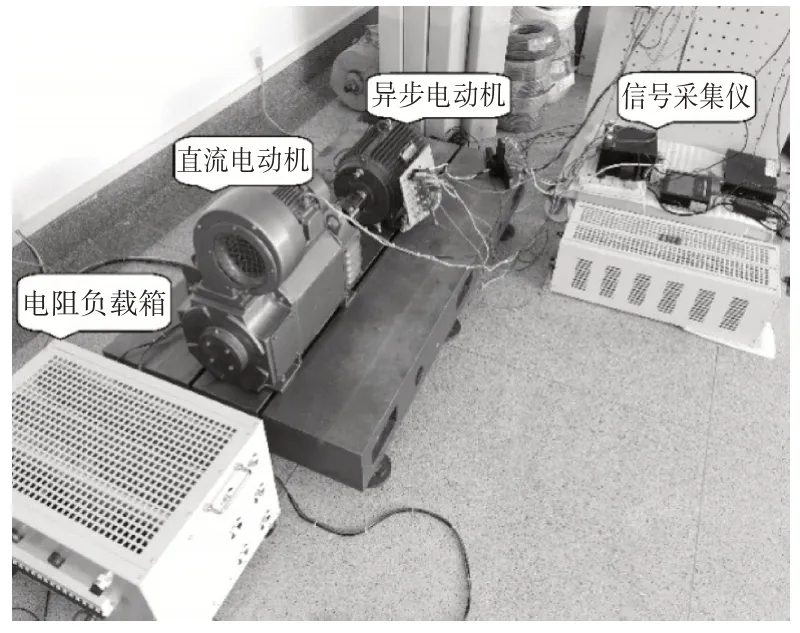
圖4 試驗裝置平臺
為獲取電機運行過程中的振動信號,試驗安裝有2 個LC0104 型振動加速度傳感器,量程0~50g。其中,1 號傳感器布置于故障軸承端的近端蓋基腳位置,2 號傳感器布置于故障軸承端的端蓋徑向側,如圖5所示。信號采集和存儲由一臺16通道信號采集儀完成,型號為INV3062A2,采樣頻率10kHz。
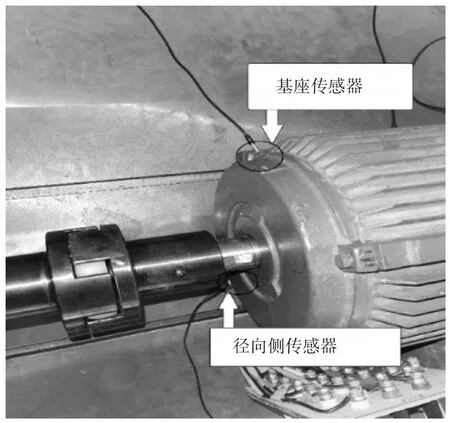
圖5 傳感器布置圖
4.2 軸承故障試驗
在異步電動機內模擬軸承外圈故障,軸承型號為6308A,在軸承外圈處開貫穿型凹槽,開槽寬度為5.0mm,深度為1.5mm,如圖6所示。
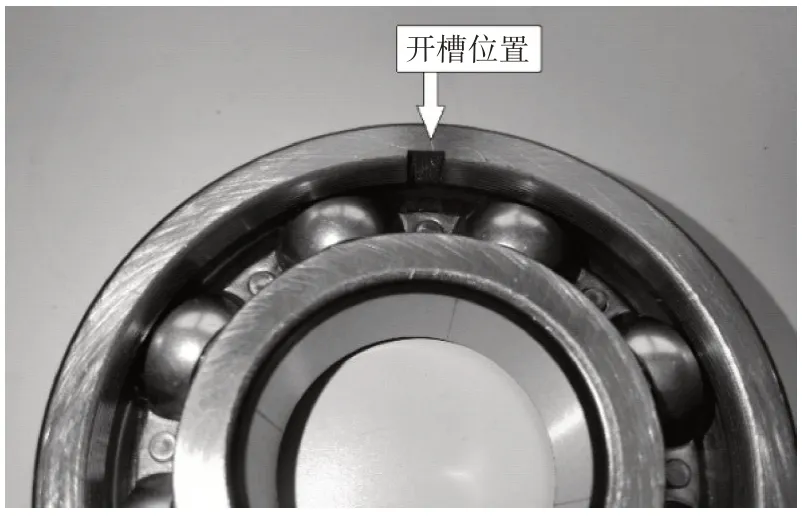
圖6 故障軸承圖
分別在健康和軸承故障狀態下,采集2 處測點的振動信號,采集時間寬度50s,如圖7所示(圖中僅顯示1024個采樣點)。從圖中可以明顯看出,當發生軸承故障時,振動信號幅值明顯增大,且端蓋徑向側振動信號明顯強于近端蓋基腳位置振動信號。
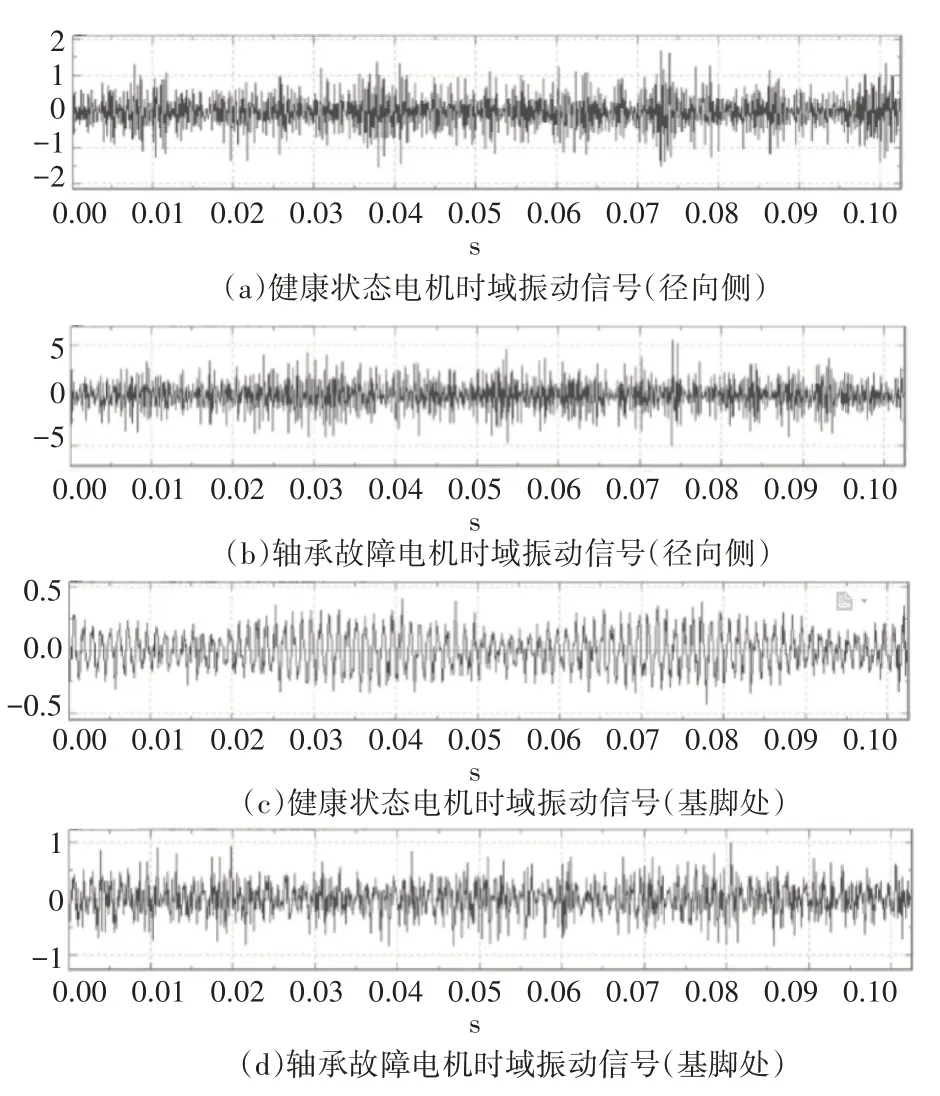
圖7 振動信號圖
4.3 結果分析
為進行對比分析,首先采用MIM 算法計算各特征量與類集合C 的互信息值,其排序情況如下式(下標代表對應的傳感器代號):
SRMsf2>RMS2>SD2>SRM2>σ22>Ku1>SD1>RMS1>SRMsf1>RMSsf1>Max2>σ21>SRM1>Max1>IF1>LF2>CF1>LF1>Ku2>Xˉ2>RMSsf2>Sk1>CF2>IF2>Sk2>
經過排序后的特征向量,排名越靠前的特征量與類的相關度越高。選取SRMsf2、IF1、進行對比分析,如圖8中所示,可以看出三者的數據分布存在明顯差異,SRMsf2、IF1具有更好的數據集中度,且在健康和軸承故障狀態下有明顯的區分度。
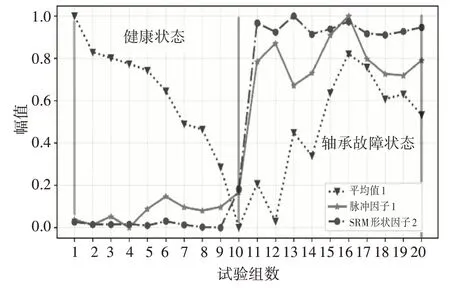
圖8 SRMsf2、IF1 與 對比圖
再使用mRMR 算法對特征向量與類集合C 的互信息值進行計算,得出排序情況如下:
SRMsf2>SRM2>RMSsf1>Max2>CF1>σ22>RMS2>SD2>SD1>Ku1>LF1>RMS1>IF1>LF2>SRMsf1>Max1>σ21>SRM1>Ku2>Sk1>RMSsf2>CF2>>IF2>Sk2>
通過對比mRMR 算法和MIM 算法排序結果,SRMsf2始終排在所有特征向量的第一位,這說明不論MIM 或mRMR 算法,在初次遍歷原始特征集后得到的結果一致,SRMsf2與類標簽的相關度最高。
結合MIM 和mRMR 算法的排序結果也可以看出,在mRMR 算法中,RMS2的排名發生了明顯的變化。這是因為,SRMsf2與RMS2的圖形走勢幾乎完全一致(參見圖9),其特征量分布情況高度集中,反映其與類標簽擁有高相關度,但同時也說明兩特征間的冗余性很高,即MIM 算法無法避免數據冗余。而mRMR 算法可以有效避免這一問題,SRM2因其與SRMsf2冗余度低,且同樣具有較高的類標簽相關度,排名得到提升。

圖9 SRMsf2、RMS2 與SRM2 對比圖
此外,通過觀察兩類互相關算法結果,端蓋徑向側的特征向量排名比較靠前,其與類標簽相關度更高,在傳感器布設數量受限的條件下,可優先考慮在端蓋徑向側位置布設振動傳感器。
5 結語
針對異步電動機軸承故障診斷中對數據降維的需要,從互信息基本概念出發,就其在特征選擇算法中的實際應用進行了研究。以異步電動機振動時域信號的統計量為樣本,并進行歸一化處理。經MIM、mRMR 算法排序后的試驗結果表明:MIM算法可以有效區分數據樣本與類標簽的關聯程度,但無法避免數據冗余;而進行mRMR 算法排序時,若樣本擁有相似數據分布趨勢,則其冗余度較高,算法會將其推后。因此,mRMR算法中排名靠前的特征量,其與類標簽的相關度高,且特征間的冗余度低。因此,基于互信息的軸承故障特征選擇算法,能夠在異步電動機軸承故障診斷中實施有效降維,提高計算效率。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學物理學報(2017年6期)2018-01-22 02:26:40
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39