一種直接上升式軌道轉移計算仿真方法
2023-05-31 09:13:46吳啟星趙靈峰
計算機仿真 2023年4期
關鍵詞:區域
吳啟星,趙靈峰,王 濤
(1. 北京跟蹤與通信技術研究所,北京 100094;2. 中國科學院微小衛星創新研究院,上海 200120;3. 中山大學智能工程學院,廣東 廣州 510006)
1 引言
軌道交會是指兩個運行在不同軌道上的航天器在空間某點彼此接近的過程。通常在軌運行的航天器并不需要進行軌道交會,甚至是要避免軌道交會。但是,隨著空間技術的不斷發展以及空間應用領域的拓展,軌道交會正逐漸成為許多空間任務執行過程中的重要環節,例如在軌服務[1]、天基空間目標監視等[2]。為了提高空間任務的執行效率,在有限末制導修正能力約束條件下實現在軌多目標快速交會顯然非常有意義,尤其是針對不在同一軌道平面上的多顆衛星[3-6]。王偉林等[7]研究了在軌航天器不同約束條件下航天器交會追蹤區、遭遇區的優化求解方法。韓威華等[8]研究了有限推力軌道轉移與交會組合優化設計問題,給出一種基于時間最優的轉移和交會模型。吳蓓蓓等[9]針對空間可交會目標數量與軌道轉移所需的脈沖速度增量等約束條件提出了一種平臺停泊軌道設計方法,并給出了優化分析模型。
本文提出了一種基于有限某修正能力的直接上升式軌道轉移優化設計方法用于目標交會軌道設計,通過轉移軌道約束條件的分析、轉移軌道的設計方法以及轉移軌道優化選擇的標準分析,給出了空間飛行器快速直接上升式軌道交會計算方法。
2 軌道轉移設計方法
空間飛行器采用直接上升軌道轉移的方式實現快速空間交會,需要對軌道轉移的約束條件進行分析,圖1為軌道直接上升軌道轉移空間交會幾何示意圖。
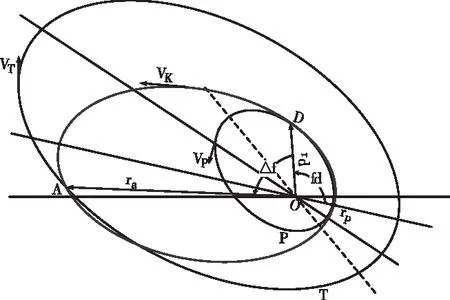
圖1 交會幾何條件示意圖
約束條件:
1) 空間飛行器應與目標同時到達某一點,這一點即為預計交會點,且位于目標軌道上;
2) 假設空間飛行器在中末制導段作慣性飛行,空間飛行器助推加速是通過助推器一次點火完成,則空間飛行器在點火點的待增速度應小于助推器的視速度增量;
3)考慮到飛行器接近目標的末制導段采用可見光導引,因此在轉移軌道的末段,進入導引頭工作范圍內時,目標星應在光照區內。
基于三個可交會約束條件,給出初制導段(助推點火段)的轉移軌道設計方法如下:
1)選擇目標軌道上的一段區域作為有效交會區域,選取一定的步長,對該區域進行搜索,并對其中的每一個預計交會點遍歷。
2)每一個預計交會點同時又能對應找到空間飛行器駐泊軌道上的一系列可允許的轉移區域。對這些可允許轉移區域也進行搜索,選取一定的步長對其中的每一個可轉移點進行遍歷。
3)如果某一個預計交會點所對應的的轉移點所需待增速度最小,則將其視為準最優轉移點。
4)在所有預計交會點所對應的準最優轉移點中,尋找所需代增速度最小的轉移點。如此,經過對有效交會區域和可允許轉移區域的兩次遍歷,最終能找到一對最佳預計交會點(位于目標軌道上)和最佳轉移點(位于飛行器駐泊軌道上)。
5)最佳預計交會點(位于目標軌道上)和最佳轉移點之間的轉移軌道,即是設計得到的轉移軌道。
上述計算步驟如圖2所示。圖中的目標在近地點附近出發,沿其軌道順時針方向運動。空間飛行器在近地點附近出發,沿其軌道逆時針方向運動。有效交會區域中的兩個預計交會點A1和A2分別對應空間飛行器的可轉移點D11,D12及D21,D22。如果空間飛行器在這四個點中的某個點進行軌道轉移時所需待增速度最小,就將其作為最佳轉移點TD_Optimal,對應的預計交會點作為最佳預計交會點TA_Optimal,二者之間的轉移軌道即是設計得到的轉移軌道。
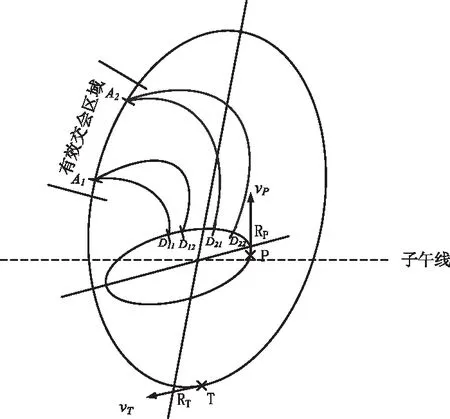
圖2 有效交會區域與可轉移區域示意圖
3 軌道轉移計算
1) 真近點角fd的取值范圍
由于空間飛行器與目標要同時到達預計交會點,所以需要分析空間飛行器的轉移點在轉移軌道上真近點角的取值范圍。轉移軌道為橢圓,轉移點和預計交會點分別為D(xd,yd,zd)和A(xa,ya,za)。這兩點到地心的向徑分別為rd、ra,滿足
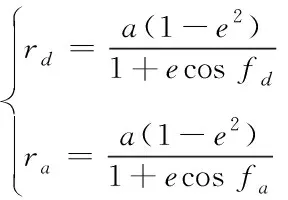
(1)
其中,a為轉移軌道的橢圓半長軸,e為偏心率。fd、fa分別為D點、A點在轉移軌道上的真近點角,并有
fa=fd+Δf
(2)
其中,Δf滿足式

(3)
2) 滿足時間約束的轉移區域確定
設飛行器與目標的初始狀態(位置、速度)已知,將目標軌道上的一點Aj作為預計交會點,目標由初始點飛行至該點的時間為taj;平臺軌道上的Di點為轉移點,平臺由初始點飛行至該點的時間為tdi。則交會時間約束條件可寫成
taj=tdi+tdi_aj
(4)
其中,tdi_aj為空間飛行器從轉移點飛行至預計交會點的時間。
3) 滿足速度增量約束的有效轉移區域確定
由于采用液體燃料助推,燃燒時間可以隨意進行控制。在空間飛行器滿載質量和助推器燃料質量已知的情況下,由式(5)可以計算得到液體動能飛行器的視速度增量Δvs
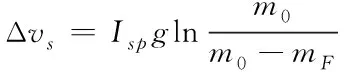
(5)
其中,Isp為助推發動機比沖,m0為空間飛行器點火時刻質量,mF為助推發動機燃料質量。
將視速度增量Δvs與每個可允許轉移區域的最小待增速度Δvdi_aj_min相比較,若有
Δvdi_aj_min≤Δvs
(6)
則表明一定可以從該可允許轉移區域中找到一條轉移軌道,使得空間飛行器沿著該轉移軌道飛行時,既滿足交會時間約束條件,助推器所提供的速度增量也能夠滿足待增速度要求,因此可以在該可允許轉移區域中選取轉移點。反之,則表明從該可允許轉移區域中任何一點Di分離后飛往預計交會點Aj,盡管可以找到滿足交會時間約束條件的轉移軌道,但這些轉移軌道在轉移點Di處的待增速度始終大于助推器所能提供的速度增量,因此最終的轉移點不能在該可允許轉移區域中選取。
如果區域最小待增速度ΔvD_aj_min比視速度增量Δvs還大,則表明對于預計交會點Aj來說,不能在駐泊軌道上找到任意一個區域作為空間飛行器的有效轉移區域,必須重新選擇預計交會點的位置。
4 軌道優化選擇算法
通過以上分析,可以找到既能滿足時間約束條件又能滿足待增速度限制的有效轉移區域。對找到的k個有效轉移區域再分別進行小步長Step_m(m=1,…k)劃分,而后對每個有效轉移區域進行搜索,得到轉移點Valid_Dmi(m=1,…k,i=1,…n) 進行遍歷。對Valid_Dmi計算滿足時間約束條件的轉移軌道,并記下對應的待增速度增量ΔvDmi_Aj。比較這m×n個待增速度,可以找出一個最小待增速度ΔvD_Aj_min。因此對于預計交會點Aj,也就找到了滿足時間約束條件下最小待增速度最小的準最佳轉移點Valid_D_Aj。
在目標有效交會區域內沿目標前進方向將目標軌道劃分從而改變預計交會點,重復以上尋找有效轉移區域和Valid_D_Aj的步驟,可以找到在目標有效交會區域內不同預計交會點對應的Valid_D_Aj。由于采用液體助推,為節約助推燃料,需要使待增速度盡量小。因此設定性能指標J滿足
J=ΔvD_Aj_min
(7)
如果能使J達到最小,那么最佳預計交會點A_optimal和最佳轉移點D_optimal也就確定下來了。然后根據這兩點求出最優的一條轉移軌道。
1) 確定轉移時間和初始姿態
空間飛行器的轉移諸元包括助推器點火時刻和點火過程中的姿態角。在最佳轉移點、最佳預計交會點和最優轉移軌道確定后,計算轉移諸元。
已知飛行器的待增速度為ΔvD_Aj_min,空間飛行器在助推發動機工作前的初始質量為m0,得到助推發動機工作消耗燃料如下

(8)
因此,助推發動機工作時長為

(9)
其中,F為助推發動機推力大小。
設td時刻空間飛行器在轉移點D處分離,當td≤t≤td+tf時,助推發動機點火,其余時間關閉。
然后是轉移時初始姿態角的計算。設td時刻轉移點D處的空間飛行器待增速度Δv在地心慣性系中的各方向分量分別為Δvx、Δvy、Δvz。根據彈體坐標系與地心慣性坐標系之間的轉換關系,可以得到

(10)

將式(10)展開并進一步整理后,可以得到轉移諸元中的偏航角ψc和俯仰角?c如下式所示

(11)
當對飛行器彈體Y1軸和Z1軸指向無特殊要求時,可設定轉移諸元中的滾轉角γc為任意角度(一般取為零)。
5 仿真結果
不加入誤差參數,在理想情況下進行數學仿真,獲得一些重要的仿真數據包括轉移軌道的軌道根數、空間飛行器的轉移諸元以及空間飛行器與目標的最小相對距離時刻、燃料消耗量等。仿真數據如下所示,其中涉及到時間的量均是按照初始時刻為0開始計算的。飛行過程中的仿真結果如圖3和圖4所示。

圖3 飛行器與目標星的軌道高度
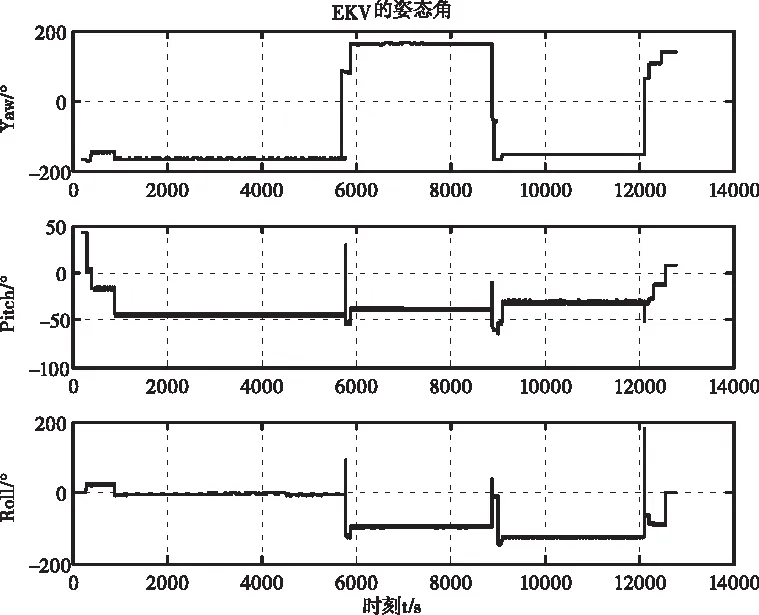
圖4 飛行器姿態變化情況
在不加誤差的情況下,分別改變目標的近地點幅角和軌道傾角的大小,考察空間飛行器在不同目標情況下的制導控制效果,從而驗證了本設計方法的有效性。表中位置偏差(D)、助推剩余燃料(mT)、軌控剩余燃料(mo)、姿控剩余燃料(mA)。
從表1~2可以看出,改變目標空間軌道的初始位置分布,空間飛行器在滿足時間約束、光照條件約束和能量最省約束條件的情況下,通過制導控制算法后得出相應的控制指令對空間飛行器進行制導飛行,達到了同目標交會的要求,位置偏差在2m~4m之間。
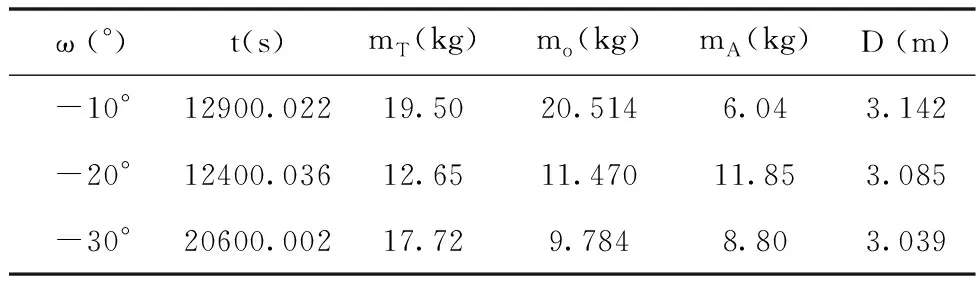
表1 同步衛星目標近地點幅角(ω)變化時最終仿真結果
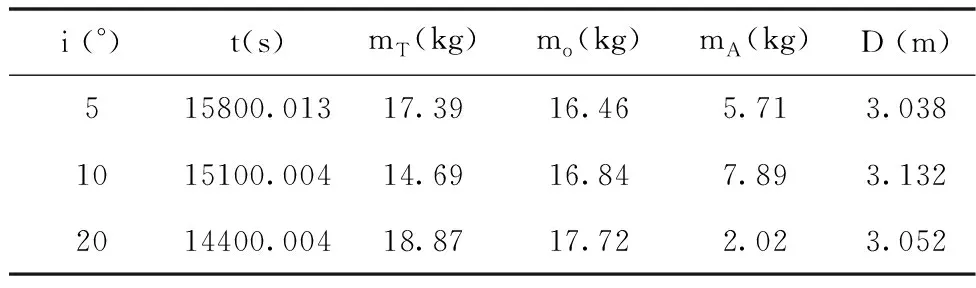
表2 同步衛星目標軌道傾角(i)變化時最終仿真結果
6 結論
隨著空間應用領域的拓展,對空間飛行器的在軌交會能力需求越來越大。本文正是針對空間飛行器在有限末制導修正能力的基礎上快速直接上升交會的實際需求,提出了一種直接上升式交會軌道設計優化選擇方法。該方法突破了傳統的共面交會軌道設計思想,有效解決飛行器與目標航天器快速交會問題提供了技術途徑,具有較大的現實意義和廣闊的應用前景。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
