水電機組開度模式的復合脈沖調節方法
2023-04-10 06:50:34郭俊鑫周宇陽方云飛黃愛平
水力發電 2023年3期
郭俊鑫,周宇陽,方云飛,李 鎮,郭 波,盧 喬,黃愛平
(1.國家能源集團新疆吉林臺水電開發有限公司,新疆 伊寧 835000;2.上海樸宜實業有限公司,上海 200240;3.新華控制工程有限公司,上海 200240)
0 引 言
水電機組并網后調速器一般處于功率模式或開度調節模式。功率模式下,調速器接收來自計算機監控系統的4~20 mA電流信號,一旦此信號受到其他裝置的干擾,或者因端子松動、斷線等引起信號波動甚至消失,勢必造成有功功率的波動,嚴重時發生溜負荷、甩負荷的情況;而且有功的經常性波動會導致液壓驅動設備動作過多,磨損頻繁,減少設備使用壽命。相比較而言,開度控制模式下的脈沖信號是穩定而可靠的,因此在實際控制中經常采用。
開度調節模式中常用的PI調節器在機網協調快速響應的運行環境下響應慢、易超調等缺點。何常勝等[1]從PID典型控制策略出發,對開度模式下的邏輯關系進行了探討,給出了斜坡函數和變參數的建議;邵宜祥等[2]通過混合仿真實驗指出,非線性魯棒控制在水電機組動態調節中能起到較好的作用,蔡衛江[3]則在提升水輪機調速器機網協調能力的技術研究中明確提出了“慢-快-慢”的控制策略以適應AGC控制的快速性和穩定性要求,折線均涉及到復雜的參數整定和邏輯切換。此外,近年來人工智能漸次引入到水電機組調節領域,程遠楚等[4]提出了仿人智能控制策略與規則,基于對控制誤差的識別來調整控制策略和控制參數,付維圣等[5]提出用遺傳算法對水輪發電機組特性進行模糊設計等,揭示了當前技術條件下具備水電機組特性實時而全面把握的能力,為復合脈沖的精準實施提供了基礎。
基于此,開度模式中復合脈沖的調節方法被發掘、引入并且逐步得到完善。本文闡述了持續長脈沖和連續短脈沖的設計原理和估算方法,以此形成的脈沖調節器功能與PID調節器有機結合,可以充分體現柔性控制的思想,達到水電有功調節快速而穩定的效果。
1 脈沖調節的優勢
1.1 PI調節的弊端
在快速性的要求下,PI參數整定較弱則調節時間變長,整定較強則超調量嚴重;而隨著水庫庫容的變化,機組最大水頭與最小水頭之間的差別較大,導致固定參數PI控制下的調節差異更為明顯,如圖1所示。

圖1 PI調節器與脈沖調節器的實控過程
此外,水輪機組的導葉開度與有功功率呈現出一定的非線性,如圖2所示,大數據顯示某水電站4臺機組存在不同程度的非線性。不同的開度范圍內有功功率控制回路的增益不同,這加劇了PI調節的困難,在拐點處容易出現調節振蕩。

圖2 導葉開度的非線性特性
導葉開度的控制取決于調速器驅動的接力器活塞位移,接力器油壓下產生的力矩遠大于靜水頭下的移動力矩,故接力器移動速度與水錘動態過程無關[6],不計接力器行程的初始段和末段,其與導葉開度為線性關系,導葉開度的變化量與接力器動作時間成正比,故而,通過控制脈沖長度即可線性地獲得導葉開度,稱為脈沖調節。
在機網協調的AGC調度與一次調頻成為常態化運行工況時,復合脈沖調節具有的速度優勢、電量控制優勢以及彈性控制的優勢逐漸凸顯。
1.2 復合脈沖調節的速度優勢
PID調節器本質上是一種反饋調節,調節過程中需要根據過程量的變化來調整被調量的幅度,調節方式是被動的,過程是非均勻的,導葉的最終位置在摸索中獲得;相比較而言,復合脈沖調節則是主動式的,在調節過程開始前導葉需要到達的位置已經明確,通過預定的脈沖驅動接力器均勻地到達,具有明顯的速度優勢,從圖1中可以看出。水輪機調節作為典型的非最小相位系統,速度優勢相當于加強了控制器增益,系統的反向響應與延遲能夠被快速度過。
在大數據與人工智能技術的支撐下,通過智能算法及其并行處理方法[7-8]對水電機組的水力特征進行全方位的跟蹤與分析,快速得到目標有功對應的導葉終端位置,為復合脈沖提供準確的定位,使其發揮速度優勢成為可能。
1.3 復合脈沖調節的電量優勢
復合脈沖的調節過程可以做到可控的快升慢降,即有功調升時快速達標,調降時貼邊達標,從而充分地利用網調的調節裕量,獲取更多的積分電量,如圖3所示。

圖3 柔性控制方式示意
由于脈沖量的精準可控,使得這種快速貼邊式調節同樣可行。以汛期為例,一天之內單臺機組貢獻十次乃至上百次調節頻次,機組的機械損耗不容忽視,充分利用網調裕量進行快速貼邊調節是完全合理的。
1.4 復合脈沖的柔性調節優勢
水輪機調節過程中由于水流慣性導致的引水系統壓力反向變化,即水錘效應帶來的功率反調不可忽視,需要在減少功率反調的同時又保證有功調節的快速性,主流思路從優化導葉變動速率為切入點,采用柔性控制方式,這對PID調節器帶來不小的挑戰,參數整定時需要兼顧快慢轉折的時機、水頭的變化、以及導葉行程的非線性,過程極為復雜。相比較而言,復合脈沖調節在精準獲知調節終端位置時,通過脈沖的占空比以及脈沖長度的控制,可以從容地實現折線控制,從而充分體現柔性調節的優勢,如圖3所示。
2 復合脈沖調節的實現方法
通過設計持續長脈沖與連續短脈沖相結合的調節方式,使得脈沖控制易于實現調節基本目標,并且整體可控地逼近柔性控制。
2.1 持續長脈沖
有功指令變化時導葉開度的變化具有近似線性的特征,持續長脈沖可以快速地完成這個導葉開度變化過程,其前提在于基于水輪機能量特性預置脈沖長度。
脈沖的總調節量Tovr為
(1)
式中,G為導葉開度;UMD為機組有功指令;fT()為水輪機能量特性實時數學模型;Gps為導葉每秒開度;下標1和2分別為調節始態和終態;ps為每秒單位。
根據AGC調節的要求,水電機組必需達到50%MCR/min的速率,其中MCR為機組額定出力,考慮到指令從調度-集控-機組監控系統-調速器的信號傳遞的耗時且為計算簡便,將該速率設為50%MCR/50s,即1%MCR/s,則導葉每秒開度Gps有
Gps×MCR/100≥1%MCR
(2)
即至少有Gps≥1才可以滿足基本調節需求。由于脈沖調節的可預測性,在接力器速率限和死區的范圍內,按照持續長脈沖的調節方式,如圖4中CuCd段所示,調速器若設定Gps為N則具備了N倍的調節速率。

圖4 脈沖方式實現的柔性控制

gps=(Tadhff(Touv,Tadh)+fm(Tovr,Tadh))Gps/
[Tadhff(Tovr,Tadh)+Tadh(ff(Tovr,Tadh)-1)+
fm(Tovr,Tadh)]
(3)
式中,ff(Tovr,Tadh)為求商取整;fm(Tovr,Tadh)為求商取余函數。
由于Titv?Tadh,故有gps較為接近Gps。
2.2 連續短脈沖
持續長脈沖可以達到快速調節的目的,為了實現柔性控制方式,需要設置連續短脈沖達到慢控制的效果,如圖4中UCu或CdD段所示。
連續脈沖的占空比D定義為
(4)
式中,Ton為脈沖循環內有效的高電平脈寬;Tcyc為脈沖循環時間。
繼而有連續短脈沖的等效導葉每秒開度gps為
(5)
常用短脈沖設置如表1所示,Ton一般小于Tcyc,則連續短脈沖明顯有gps 表1 常用短脈沖設置 執行水電機組的過程控制時,通過持續長脈沖與連續短脈沖(本文合成為脈沖調節器邏輯功能塊)的復合構建柔性調節的基礎上,體現PID調節器與脈沖調節器的有機結合,如圖5所示,保留了PID調節器以備脈沖回路故障時控制模式切換的需要,同時當脈沖回路調節失當時,還可以通過PID調節器完成調節補位。圖中,UL為機組實際有功,Kp為比例系數,Ti為積分時間,Sp和Pv分別表示設定值與過程變量實測值,G為導葉實際開度,inc和dec分別為增減脈沖輸出,其余見文中說明。 圖5 基于復合脈沖調節的水電機組控制邏輯結構示意 原則上,脈沖調節器兼備復合脈沖調節和PID調節執行器的功能,當信號ovr置位時,脈沖調節器執行復合脈沖功能,當ovr復位時脈沖調節器轉變為PID調節器的執行器。信號ovr的判決條件包括:①脈沖執行回路是否健康;②平行控制器集群是否健康,即是否可靠地獲取Tovr參數;③脈沖調節周期完成后是否調節目標仍未達成等。 邏輯結構中,PID調節器的比例項Kp、積分項Ti,脈沖調節器的Tcyc、Titv等均為變參數,邏輯設計時根據UMD以及G的實際值向目標值的逼近程度而整定;此外,Tadh和Titv一般為常數。 組態設計時,需要充分考慮組態頁面掃描周期(執行周期)與脈沖執行回路中脈寬之間的協同性,避免出現脈沖實際有效長度被截斷或者虛充的現象,這與計算機監控系統和調速器的具體設置有關,不再贅述。 復合脈沖調節過程中,導葉開度的變化速度明顯超過常規PID控制,為了保證調節過程中最大壓力上升率在規定的范圍內,需要進行最大水錘的理論試算。 某水電單元機組設計流量為119.44 m3/s,額定水頭117 m,管道直徑4.6 m,取行波速度1 000 m/s,則管道特性系數 (6) 管道總長500 m,水錘單相時長Tr=2L/a=1。 顯然有ρτ0>1,為末項水錘。根據水錘壓力計算通式并取泰勒級數展開,閥門關閉過程中第n相末的水錘壓力為 (7) 整理得 (8) 分別取Gps為5、3、2,試算瞬態過程最大水錘如圖6所示。在取最大值Gps=5時,最大水錘壓力增幅不超過18%。根據GB/T 5186—2004《水電站機電設計規范》之規定,該機組蝸殼最大允許壓力上升率不得大于25%~30%,故而在安全裕度之內。 圖6 最大水錘壓力試算 某水電站裝有4臺單機125 MW混流式水輪發電機組,參數規格同前例。 現場增設了共水力單元平行控制系統,將調速器開度模式下計算機監控系統有功調節功能轉移至該系統中,并納入PID調節器與脈沖調節器相結合的控制方式,形成基于復合脈沖調節的水電機組開度模式優化控制方法,在各臺機組進行了長期試驗。 系統間切換和脈沖指令由繼電器實現,繼電器采用了較為可靠的固態繼電器,系統通過增、減繼電器向調速器發脈沖指令,通過兩個切換繼電器實現計算機監控系統和共水力單元平行控制系統的控制權切換。 繼電器邏輯設置如圖7所示,圖中,K3為共水力單元平行控制系統增有功繼電器;K4為共水力單元平行控制系統減有功繼電器;K5為增有功切換繼電器;K6為減有功切換繼電器;KO1為計算機監控系統增有功繼電器;KO2為計算機監控系統減有功繼電器。 圖7 繼電器邏輯設置 選擇持續長脈沖方式進行AGC條件下的單機調節,某日連續經歷6次有功指令變動,其過程如圖8所示,其中UL為機組實際有功。圖中分別標出了90%與50%的MCR/min參考線,當UL落在UMD與50%MCR/min參考線的包絡之內則為調節合格。圖中顯見,調節過程基本控制在90%MCR/min包絡之內,調節品質優秀。不過,在小幅度有功變化時,這個優勢并不明顯,這是由于此時復合脈沖與PID調節器的執行曲線(即導葉開度的實際變化過程曲線)相差無幾的原因。 圖8 基于復合脈沖調節的單機調節過程實錄 由于復合脈沖的執行曲線起步快,其引起的水錘效應顯著于PID調節過程,不過由于后繼執行曲線保持了這種快速性,水錘引起的功率反調被快速拉回,期間產生的積分電量也會快速復歸,因此復合脈沖能夠更好地滿足AGC快速調節的要求,工程中的長期實踐也證實了這一點。 非單機運行,尤其一洞多機同時受控于AGC調節時[9],AGC考核目標為機組組合的總體出力,此時調節初期的水錘效應不可忽視,此外,共水力單元機組之間的水力干擾也容易加劇這個過程,需要實施持續基于長脈沖+連續短脈沖模式的柔性控制并且考慮到水力干擾的不利影響,本文不再展開。 作為水電機組調節的常用模式,導葉開度調節具有穩定可靠的特質,但是計算機監控系統PI調節器調節品質欠佳,有功調節的變載率、超調量、衰減率等指標也較難達到理想的平衡,尤其在機網協調快速響應的要求下,機組有功調節較難滿足“兩個細則”要求,其原因在于脈沖調節的潛質沒有充分發揮出來。本文通過持續長脈沖與連續短脈沖的結合,形成了執行曲線的快慢速率控制,實現導葉開度柔性調節,當水輪機的能量特性被實時而準確地獲取時,基于復合脈沖調節的開度模式可以取得足夠優秀的調節特性,體現在以下方面: (1)復合脈沖調節下的執行曲線具有近似線性的特性,簡單直觀,可以大大簡化柔性控制的理論計算難度和實現難度,尤其在共水力干擾條件下考慮控制策略解耦與優化時。 (2)在并行計算、超實時計算等新技術應用到工業現場的背景下,計算機監控系統可以充分掌握水輪機的實時能量特性,使得復合脈沖的控制終點清晰、過程明確,從而保證了調節的快速性。 (3)復合脈沖的實施較為簡單,對現有系統的改造是增量式的,并不影響原有功能,并且能夠與PID調節器有機地結合在一起。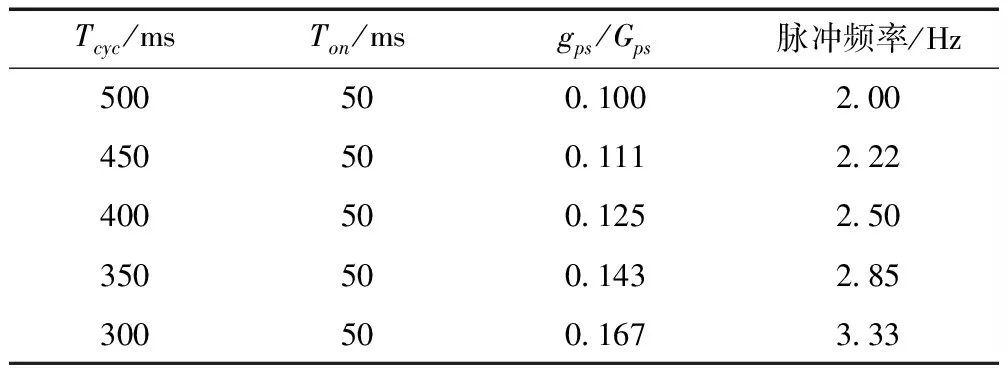
2.3 邏輯結構設計與組態

3 復合脈沖調節過程最大水錘

4 基于復合脈沖調節的工程實踐


5 結 論