近20年中國智能機器人領(lǐng)域研究熱點
——基于CiteSpace的文獻(xiàn)計量分析
2023-04-08 13:58:54褚旭龍史冬梅劉進(jìn)長
科學(xué)技術(shù)與工程 2023年6期
褚旭龍, 史冬梅, 劉進(jìn)長*
(1.科學(xué)技術(shù)部高技術(shù)研究發(fā)展中心, 北京 100044; 2.北京航空航天大學(xué)公共管理學(xué)院, 北京 100191)
伴隨著人工智能技術(shù)、新材料技術(shù)、自動化控制技術(shù)、信息通信技術(shù)以及微電子技術(shù)等多個技術(shù)領(lǐng)域的融合發(fā)展,機器人技術(shù)實現(xiàn)了快速進(jìn)步。相較于原有的基于可編程程序?qū)崿F(xiàn)相關(guān)作業(yè)能力的傳統(tǒng)機器人,智能機器人在感知、判斷、決策到行動的多個環(huán)節(jié)的智能化水平得到了大大的提升[1],可以替代人類執(zhí)行重復(fù)性和高危性任務(wù),甚至是在深海或太空等人類難以生存的環(huán)境下持續(xù)性的開展工作,其發(fā)展水平是一個國家科技創(chuàng)新發(fā)展的重要體現(xiàn),已成為世界各個國家科技發(fā)展的重要戰(zhàn)略領(lǐng)域。
智能機器人發(fā)展計劃方面,包括美國、歐洲、日本和中國等在內(nèi)的主要國家均依據(jù)自身的生產(chǎn)力發(fā)展需求開展了智能機器人領(lǐng)域相關(guān)的戰(zhàn)略研究與部署[2]。美國先后發(fā)布了先進(jìn)制造業(yè)伙伴計劃、機器人路線圖和國家機器人計劃等計劃,明確了智能機器人的戰(zhàn)略地位,系統(tǒng)規(guī)劃了技術(shù)發(fā)展方向,強調(diào)了加速智能機器人在制造業(yè)和醫(yī)療健康領(lǐng)域的應(yīng)用發(fā)展。歐盟數(shù)字議程、第七研發(fā)框架計劃以及2020地平線項目一直將機器人技術(shù)作為關(guān)鍵優(yōu)選領(lǐng)域。日本政府將機器人作為經(jīng)濟增長戰(zhàn)略的重要支柱,于2015 年發(fā)布《機器人新戰(zhàn)略》,提出了機器人與人工智能、大數(shù)據(jù)、網(wǎng)絡(luò)通信等多技術(shù)領(lǐng)域的融合發(fā)展規(guī)劃,旨在建設(shè)世界一流的機器人應(yīng)用社會。中國發(fā)布了《機器人產(chǎn)業(yè)發(fā)展規(guī)劃(2016—2020 年)》,提出“新一代機器人技術(shù)取得突破,智能機器人實現(xiàn)創(chuàng)新應(yīng)用;推進(jìn)工業(yè)機器人向中高端邁進(jìn);促進(jìn)服務(wù)機器人向更廣領(lǐng)域發(fā)展”。
智能機器人的應(yīng)用場景方面,已在工業(yè)領(lǐng)域得到廣泛應(yīng)用,并隨著智能化水平的提升拓展至醫(yī)療健康、特種作戰(zhàn)、航空航天等領(lǐng)域[3]。機器學(xué)習(xí)、深度學(xué)習(xí)、強化學(xué)習(xí)等人工智能技術(shù)逐步作為核心關(guān)鍵技術(shù)應(yīng)用于機器人的研制[4]。在工業(yè)領(lǐng)域方面,能夠按照設(shè)定的程序執(zhí)行運動路徑和作業(yè),包括焊接、噴涂、組裝、采集、放置、產(chǎn)品檢測和測試等;在醫(yī)療健康方面,包括微外科手術(shù)機器人以及養(yǎng)老服務(wù)性機器人等;在特種作戰(zhàn)方面,包括排爆機器人、爬壁機器人、管道機器人以及救災(zāi)機器人等;在航空航天方面,涉及深空探測和空間站等方向的應(yīng)用。智能機器人領(lǐng)域的發(fā)展能夠推動智能制造、智能交通、醫(yī)療健康以及特種作戰(zhàn)等領(lǐng)域的創(chuàng)新,對國家經(jīng)濟、社會以及國防軍事的高質(zhì)量發(fā)展產(chǎn)生愈發(fā)重要的影響,是當(dāng)下研究的熱點話題之一。
鑒于智能機器人技術(shù)領(lǐng)域的重要戰(zhàn)略地位,現(xiàn)開展中國智能機器人領(lǐng)域研究現(xiàn)狀、趨勢以及熱點的研究,選用CiteSpace軟件開展可視化分析[5],數(shù)據(jù)源為2002—2022 年期間中國知網(wǎng)(CNKI)數(shù)據(jù)庫中收錄的與研究主題相關(guān)的2 258篇中文文獻(xiàn),并對生成的可視化結(jié)果進(jìn)行歸納與總結(jié),旨在為中國智能機器人的研究提供相關(guān)參考,提升智能機器人領(lǐng)域的研究水平。
1 數(shù)據(jù)源與分析方法
1.1 數(shù)據(jù)源
以中國知網(wǎng)(CNKI)數(shù)據(jù)庫收錄的期刊文獻(xiàn)為檢索數(shù)據(jù)源,并開展了檢索策略設(shè)計。檢索策略主要包括:主題檢索詞設(shè)定為“智能機器人”,語種設(shè)置為“中文”,期刊來源設(shè)置為“SCI期刊、EI期刊以及核心期刊”,期刊發(fā)表年份范圍設(shè)置為“2002年—2022 年”,設(shè)置“同義詞擴展”。
根據(jù)上述檢索策略,共計檢索出相關(guān)期刊文獻(xiàn)2 421 篇。同時,為保證研究數(shù)據(jù)的高質(zhì)量性,對檢索出的文獻(xiàn)進(jìn)行了多重篩選。首先對所檢索出的文獻(xiàn)進(jìn)行逐一核查,去除了包括會議通知、書稿序言、報紙以及與本文研究主題相關(guān)度不高的文獻(xiàn)等在內(nèi)的143 篇無效數(shù)據(jù)。然后,使用CiteSpace軟件對剩余的文獻(xiàn)數(shù)據(jù)進(jìn)行去重操作,共去除20 篇文獻(xiàn)數(shù)據(jù)。通過上述步驟,最終得到了本文的研究數(shù)據(jù),共計2 258 篇文獻(xiàn)。
1.2 分析方法
本文基于知識圖譜的方法進(jìn)行相關(guān)研究。其優(yōu)勢在于能夠以直觀的可視化方式展示出研究領(lǐng)域內(nèi)在的相關(guān)主題間的邏輯關(guān)系,從而支撐研究人員開展技術(shù)領(lǐng)域的發(fā)展現(xiàn)狀與趨勢、研究熱點的分析。知識圖譜方法是數(shù)學(xué)、可視化技術(shù)、計量分析以及圖形學(xué)等多個學(xué)科的綜合應(yīng)用。
選用CiteSpace軟件為研究分析工具。該軟件由美國德雷塞爾大學(xué)陳超美教授基于JAVA語言研制,并已成為開展領(lǐng)域熱點分析的主流軟件之一。該軟件可分別從關(guān)鍵詞、研究機構(gòu)、作者、引用文獻(xiàn)等多個角度開展共現(xiàn)分析,并以可視化圖譜的方式表征出研究主題間的內(nèi)在邏輯關(guān)系,同時能夠以時間線軸的方式展示出領(lǐng)域內(nèi)相關(guān)要素的發(fā)展脈絡(luò)[6-7],能夠有效支撐本文研究的工作,滿足研究需求。
2 結(jié)果與分析
2.1 發(fā)文量
對年發(fā)文量進(jìn)行分析,可以在一定程度上了解中國在智能機器人領(lǐng)域發(fā)展的總體趨勢情況。基于所檢索的2 258 篇文獻(xiàn)數(shù)據(jù)開展發(fā)文量分析,相關(guān)結(jié)果如圖1所示。可以看到,從2002年1月—2022年6月,智能機器人領(lǐng)域的文獻(xiàn)發(fā)文量呈現(xiàn)穩(wěn)中有升的發(fā)展趨勢。
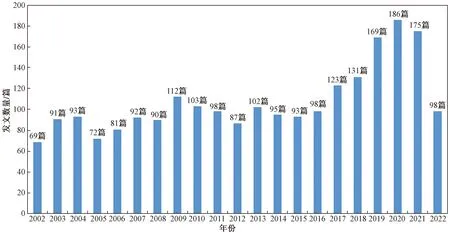
圖1 2002—2022 年發(fā)文量Fig.1 Number of published papers during 2002—2022
依據(jù)增長率因素,將2002—2022 年的時間區(qū)間劃分為兩部分。第一部分設(shè)置為2002—2016 年,經(jīng)過計算得到年度平均發(fā)文量約為92 篇。第二部分設(shè)置為2017—2021 年,由圖1可以較直觀地看出這個區(qū)間內(nèi)年度發(fā)文量快速增長,經(jīng)過計算得到年度平均發(fā)文量約為156 篇,遠(yuǎn)高于第一部分區(qū)間的發(fā)文量平均值。2022年1—6月發(fā)文量為98篇。
2016 年,中國工業(yè)和信息化部、國家發(fā)展改革委、財政部等三部委聯(lián)合印發(fā)了《機器人產(chǎn)業(yè)發(fā)展規(guī)劃(2016—2020 年)》。該政策重點強調(diào)了機器人產(chǎn)業(yè)發(fā)展要推進(jìn)重大標(biāo)志性產(chǎn)品率先突破。隨后,2017 年至今的近5 年,中國在智能機器人領(lǐng)域的年度發(fā)文量快速增長,在一定程度上說明了國家相關(guān)政策能夠有效促進(jìn)領(lǐng)域研究的快速發(fā)展。
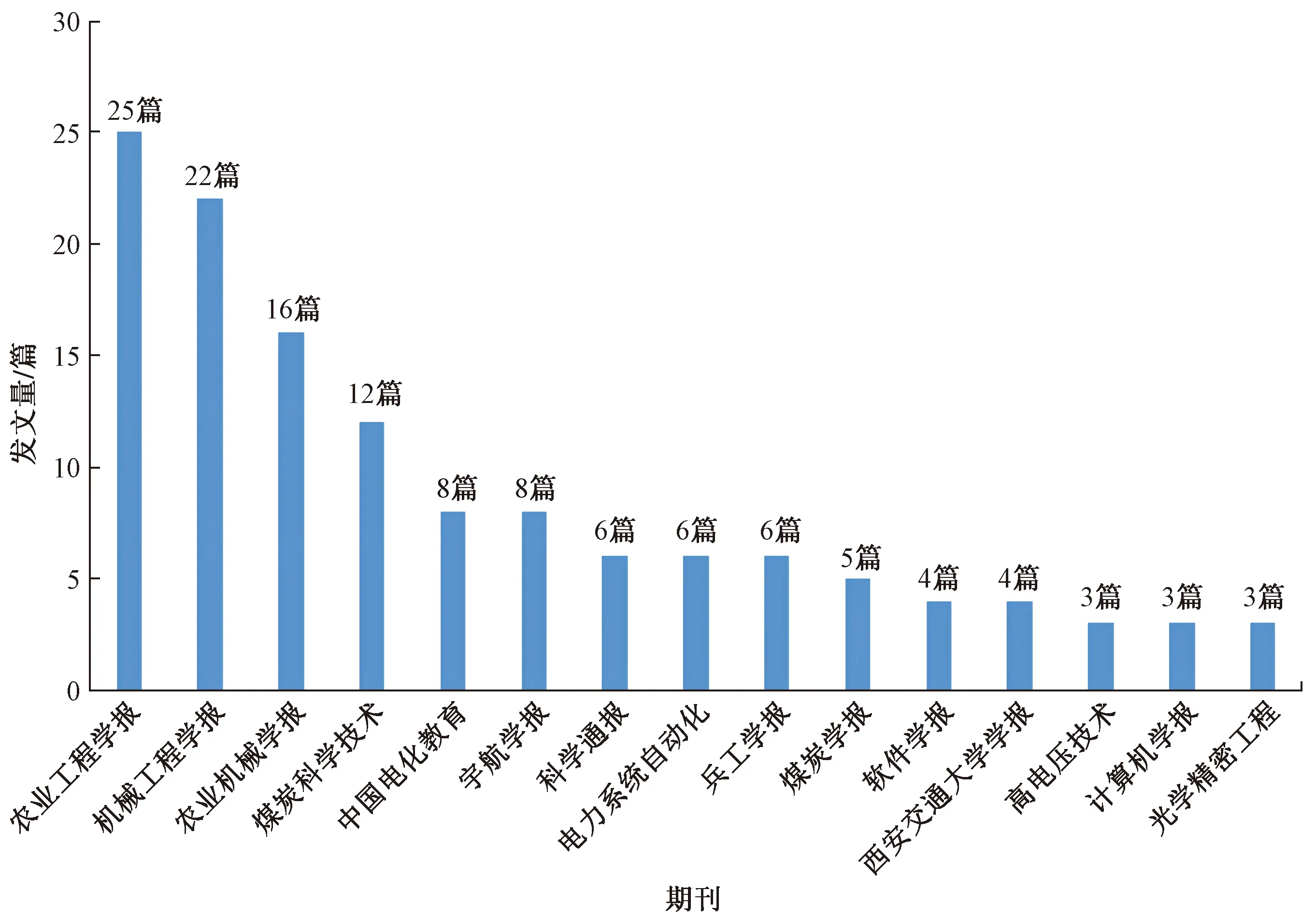
圖2 期刊分布圖Fig.2 Distribution map of journals
2.2 期刊分布
對納入2 258 篇文獻(xiàn)進(jìn)行期刊分布分析,從而了解該領(lǐng)域的主要核心發(fā)表平臺和所覆蓋的技術(shù)領(lǐng)域情況。結(jié)果如圖2所示。
《農(nóng)業(yè)工程學(xué)報》是智能機器人領(lǐng)域的主要期刊發(fā)表平臺,發(fā)文數(shù)為 25篇;排名第二的是《機械工程學(xué)報》,發(fā)文數(shù)為22 篇;排名第三的是《農(nóng)業(yè)機械學(xué)報》,發(fā)文數(shù)為16 篇。這三本期刊屬于農(nóng)業(yè)工程類核心期刊或國家級學(xué)術(shù)期刊。
同時,由圖2可以分析出智能機器人文獻(xiàn)期刊分布跨度大、涉及面寬,反映出該研究領(lǐng)域是綜合了機械電子、自動化控制、傳感器技術(shù)、計算機技術(shù)和人工智能等多領(lǐng)域、多學(xué)科的復(fù)雜高新技術(shù)領(lǐng)域。國內(nèi)主要發(fā)表期刊涵蓋了應(yīng)用于農(nóng)業(yè)類、煤炭類等機械工程類在內(nèi)的工業(yè)機器人和服務(wù)機器人等研究方向,這也反映了中國智能機器人的研究熱點。
2.3 研究機構(gòu)
對納入2 258 篇文獻(xiàn)進(jìn)行研究機構(gòu)發(fā)文量統(tǒng)計分析,從而了解智能機器人領(lǐng)域的關(guān)鍵核心研究機構(gòu),如圖3所示。可以看出,上海交通大學(xué)在該領(lǐng)域的發(fā)文量排名第一,為77 篇;華南理工大學(xué)排名第二,為72 篇;北京航空航天大學(xué)排名第三,為71 篇。
同時,本文使用CiteSpace軟件進(jìn)行研究機構(gòu)合作網(wǎng)絡(luò)圖譜分析,旨在展示出中國在智能機器人研究領(lǐng)域的核心研究群體[8],如圖4所示。可以看到,形成了3 個合作較強的研究機構(gòu)群體。集群1主要以北京航空航天大學(xué)機器人研究所和中國科學(xué)院下多個研究院為主體,同時還包括東北大學(xué)、北京科技大學(xué)、首都醫(yī)科大學(xué)、中國兵器工業(yè)集團(tuán)和中國極地研究中心等機構(gòu),該集群是國內(nèi)智能機器人領(lǐng)域合作關(guān)系最大的集群。集群2主要以上海交通大學(xué)為主體,包括上海交通大學(xué)的機器人研究所、自動化系、工程訓(xùn)練中心和山東魯能智能技術(shù)有限公司。集群3是以中國礦業(yè)大學(xué)為主體,主要包括中國礦業(yè)大學(xué)機電工程學(xué)院、中國礦業(yè)大學(xué)(北京)機電與信息工程學(xué)院和中信重工開誠智能裝備有限公司。
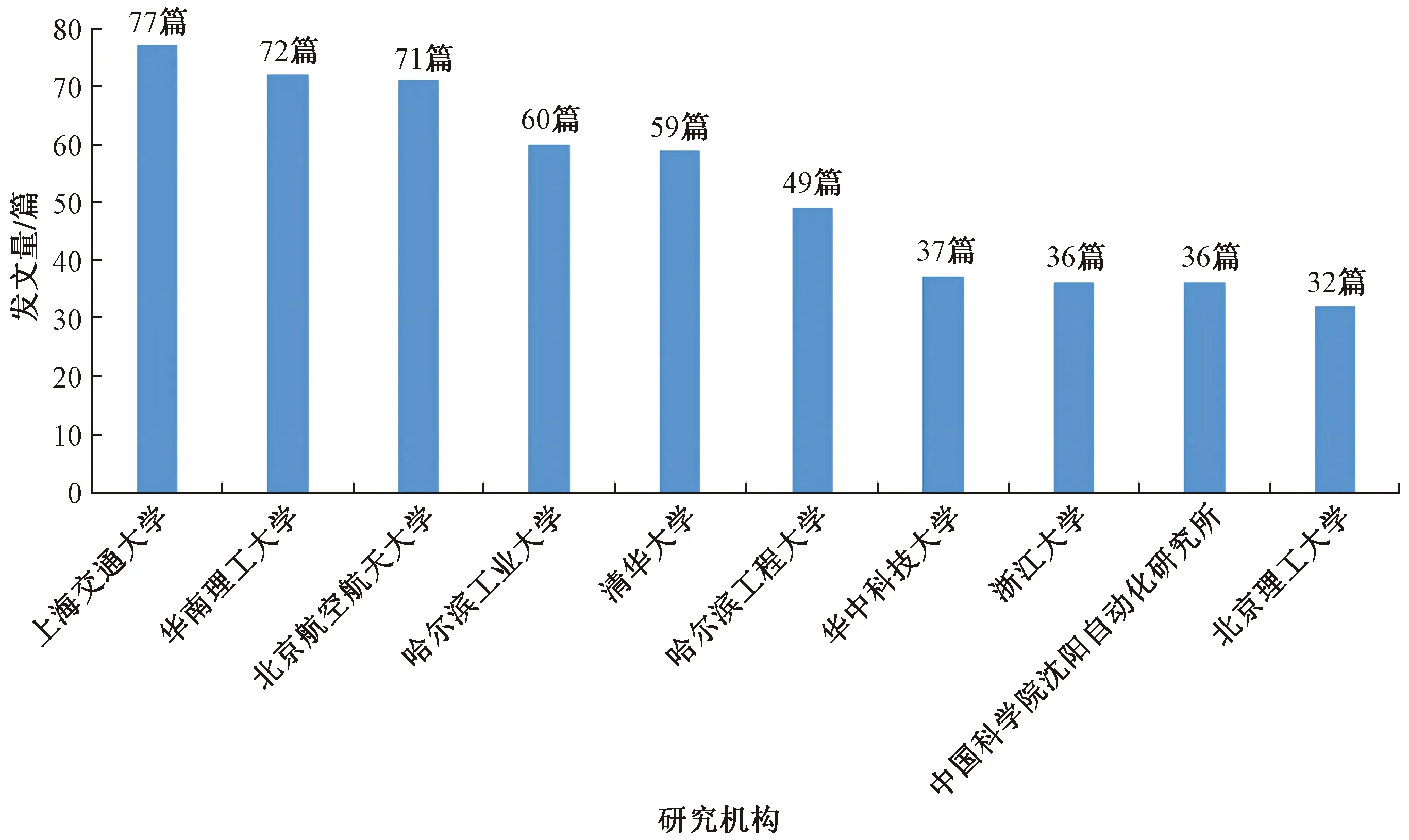
圖3 發(fā)文機構(gòu)分布圖Fig.3 Distribution diagram of the institutions publishing papers
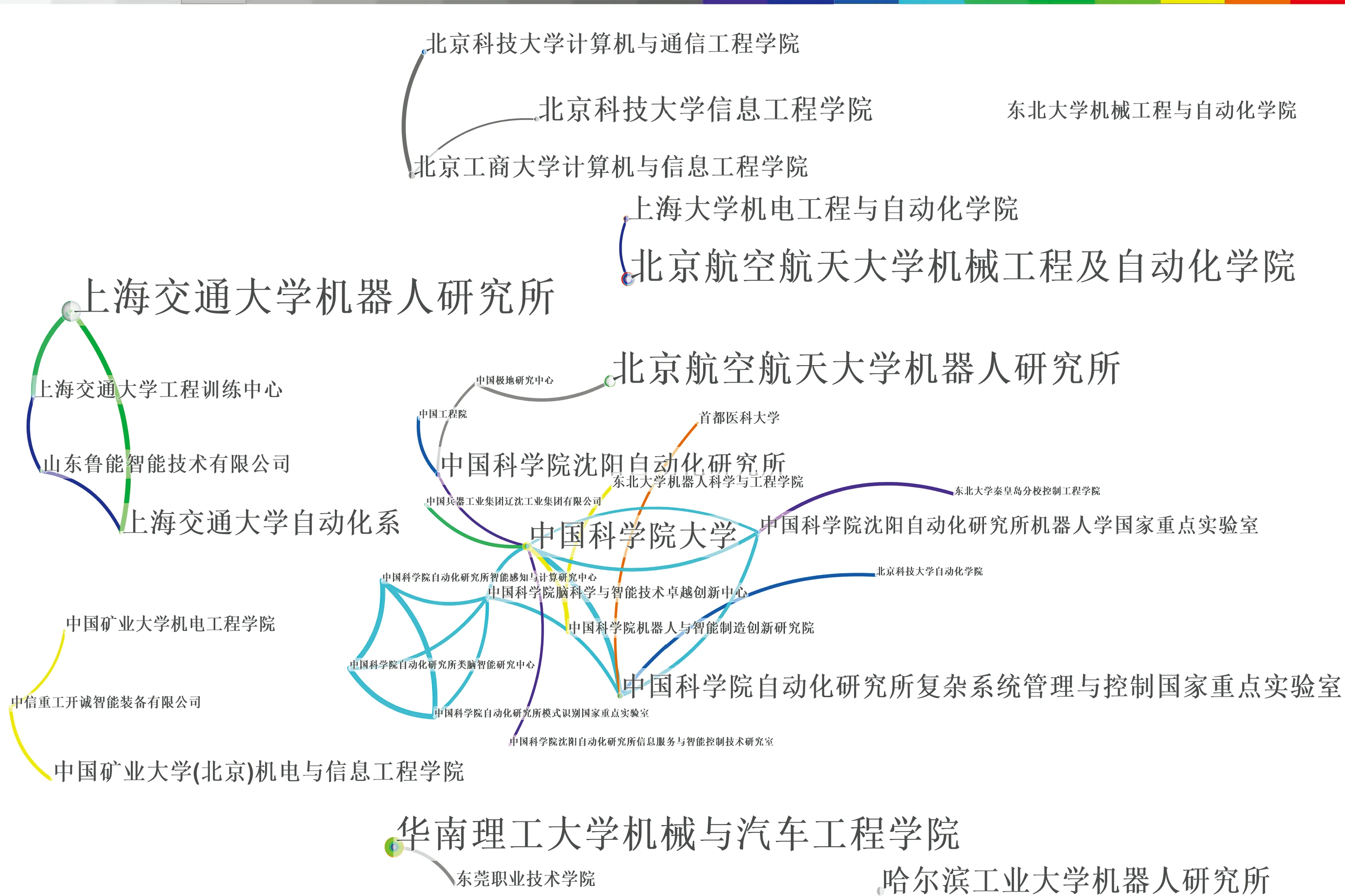
圖4 研究機構(gòu)合作關(guān)系Fig.4 Partnership of research institution
研究機構(gòu)合作集群展現(xiàn)出跨域合作并形成高校、研究院與企業(yè)協(xié)同研究的關(guān)系。鑒于智能機器人領(lǐng)域的多學(xué)科復(fù)雜性,關(guān)鍵核心技術(shù)的突破需要基于各優(yōu)秀研究機構(gòu)的共同努力,集合優(yōu)勢資源攻堅克難;科學(xué)技術(shù)的研究支撐著產(chǎn)業(yè)化的發(fā)展與成熟,同時,產(chǎn)業(yè)化應(yīng)用亦能夠拉動科研活力,加速研究成果的產(chǎn)出。
2.4 關(guān)鍵詞共現(xiàn)可視化分析
論文的關(guān)鍵詞往往能夠概況性地體現(xiàn)出該論文的核心研究主題,而同時存在于一篇文章中的幾個關(guān)鍵詞,其間會存在邏輯關(guān)聯(lián)關(guān)系,這種關(guān)系為共現(xiàn)頻次。通過對某個領(lǐng)域的相關(guān)文獻(xiàn)所涉及的關(guān)鍵詞進(jìn)行共現(xiàn)頻次分析,能夠一定程度上反映出該領(lǐng)域的研究熱點[9]。
使用CiteSpace軟件,以關(guān)鍵詞為研究要素,開展關(guān)鍵詞共現(xiàn)分析,結(jié)果如圖5和表1所示。圖5是生成的關(guān)鍵詞共現(xiàn)圖譜,其中,關(guān)鍵詞節(jié)點N為339 個,關(guān)鍵詞間的連線數(shù)量E為651 條。在關(guān)鍵詞共現(xiàn)圖譜中,關(guān)鍵詞字體的大小反映了其出現(xiàn)頻次數(shù)量的不同,頻次大小與可視化節(jié)點的字體大小成正比;關(guān)鍵詞間連線的粗細(xì)程度反映了關(guān)鍵詞之間的聯(lián)系程度,其間的連線越粗代表關(guān)鍵詞聯(lián)系越緊密[10]。由圖5可知,機器人、智能機器人、人工智能等與其他關(guān)鍵詞之間連線較多,是智能機器人相關(guān)文獻(xiàn)的核心詞匯。國內(nèi)智能機器人關(guān)鍵詞共現(xiàn)圖譜的網(wǎng)絡(luò)密度為0.011 4,和研究機構(gòu)合作圖譜相比較可知,關(guān)鍵詞共現(xiàn)網(wǎng)絡(luò)的結(jié)構(gòu)緊密度大幅提升,約為10 倍。
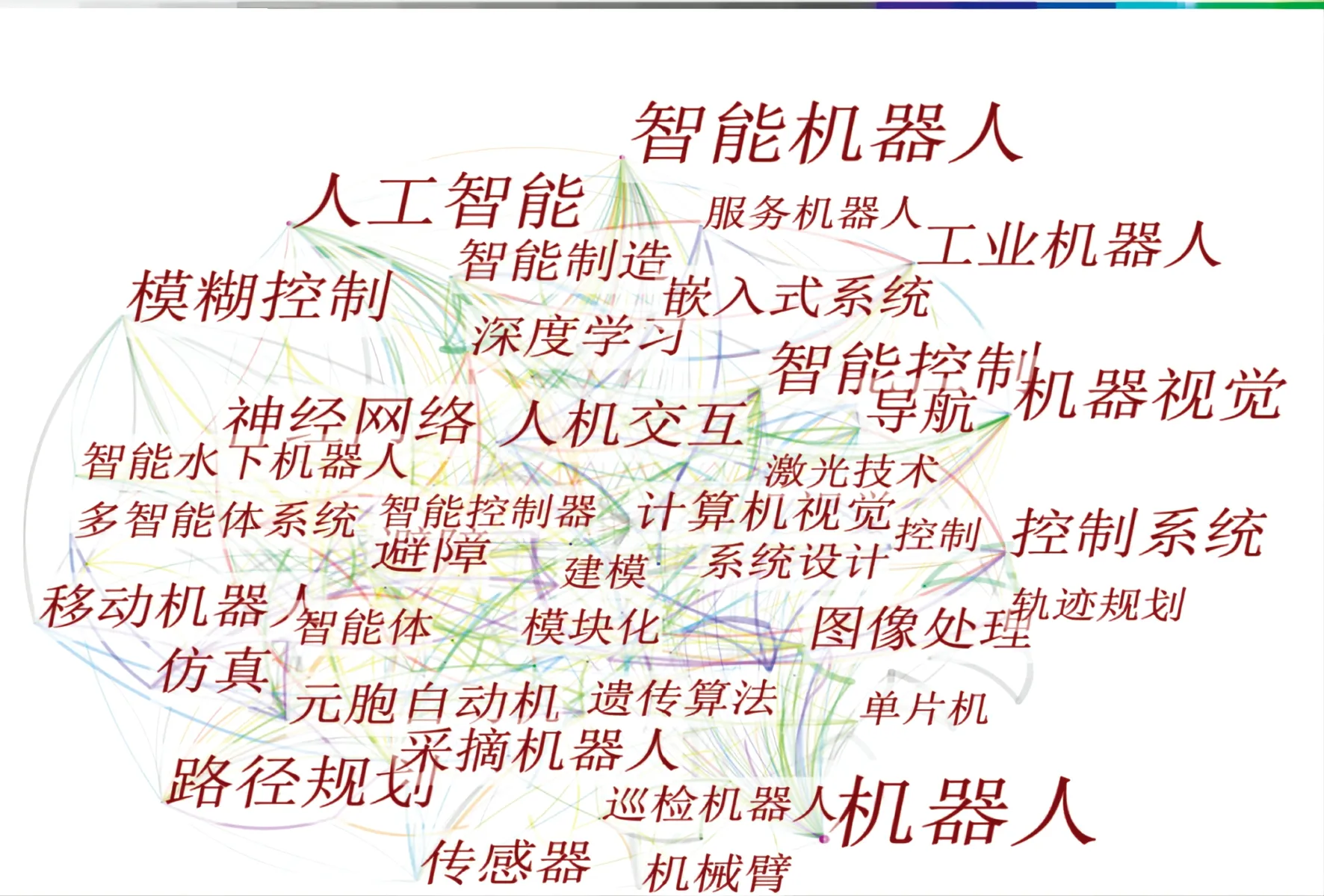
圖5 關(guān)鍵詞共現(xiàn)Fig.5 Co-occurrence of keywords
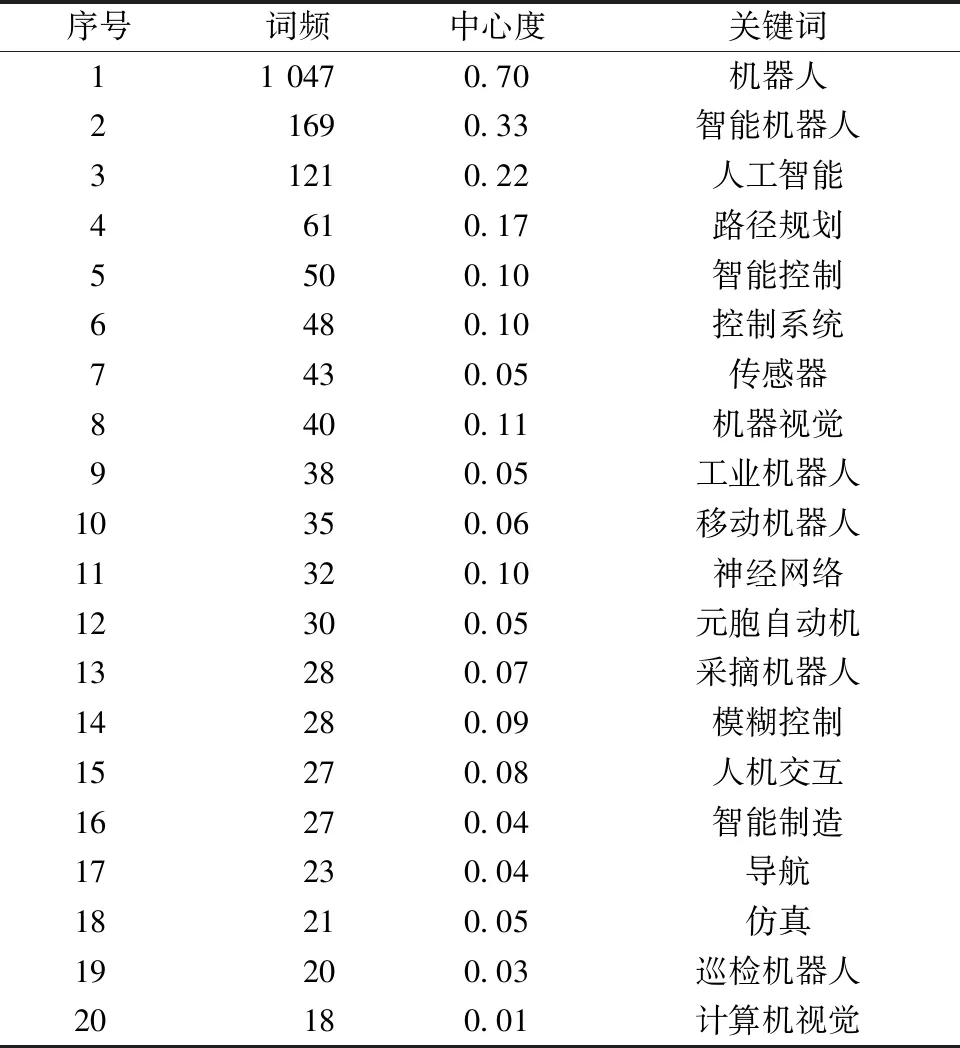
表1 關(guān)鍵詞詞頻居于前20 位分布情況
其中網(wǎng)絡(luò)詞頻居于前20 位的關(guān)鍵詞分布情況見表1。其中前10位的關(guān)鍵詞為:機器人(1 047 次)、智能機器人(169 次)、人工智能(121 次)、路徑規(guī)劃(61 次)、智能控制(50 次)、控制系統(tǒng)(48 次)、傳感器(43 次)、機器視覺(40 次)、工業(yè)機器人(38 次)、移動機器人(35 次)。關(guān)鍵詞出現(xiàn)頻次越高,表明該關(guān)鍵詞為熱點問題。
2.5 關(guān)鍵詞突現(xiàn)及時間線分析
在某一研究領(lǐng)域內(nèi),通常情況下,突然出現(xiàn)的一系列動態(tài)概念和潛在的研究問題,往往能夠反映出該領(lǐng)域的研究前沿。同時,在一定時間區(qū)間內(nèi),以突現(xiàn)詞為知識基礎(chǔ)所關(guān)聯(lián)的多篇文獻(xiàn)所涵蓋的研究主題,可以作為研究前沿的判定和預(yù)測標(biāo)注之一[11]。因此,本文研究使用CiteSpace軟件開展突現(xiàn)詞分析,旨在研究中國智能機器人領(lǐng)域的研究前沿,相關(guān)結(jié)果如圖6所示,共探究到20 個突現(xiàn)詞。
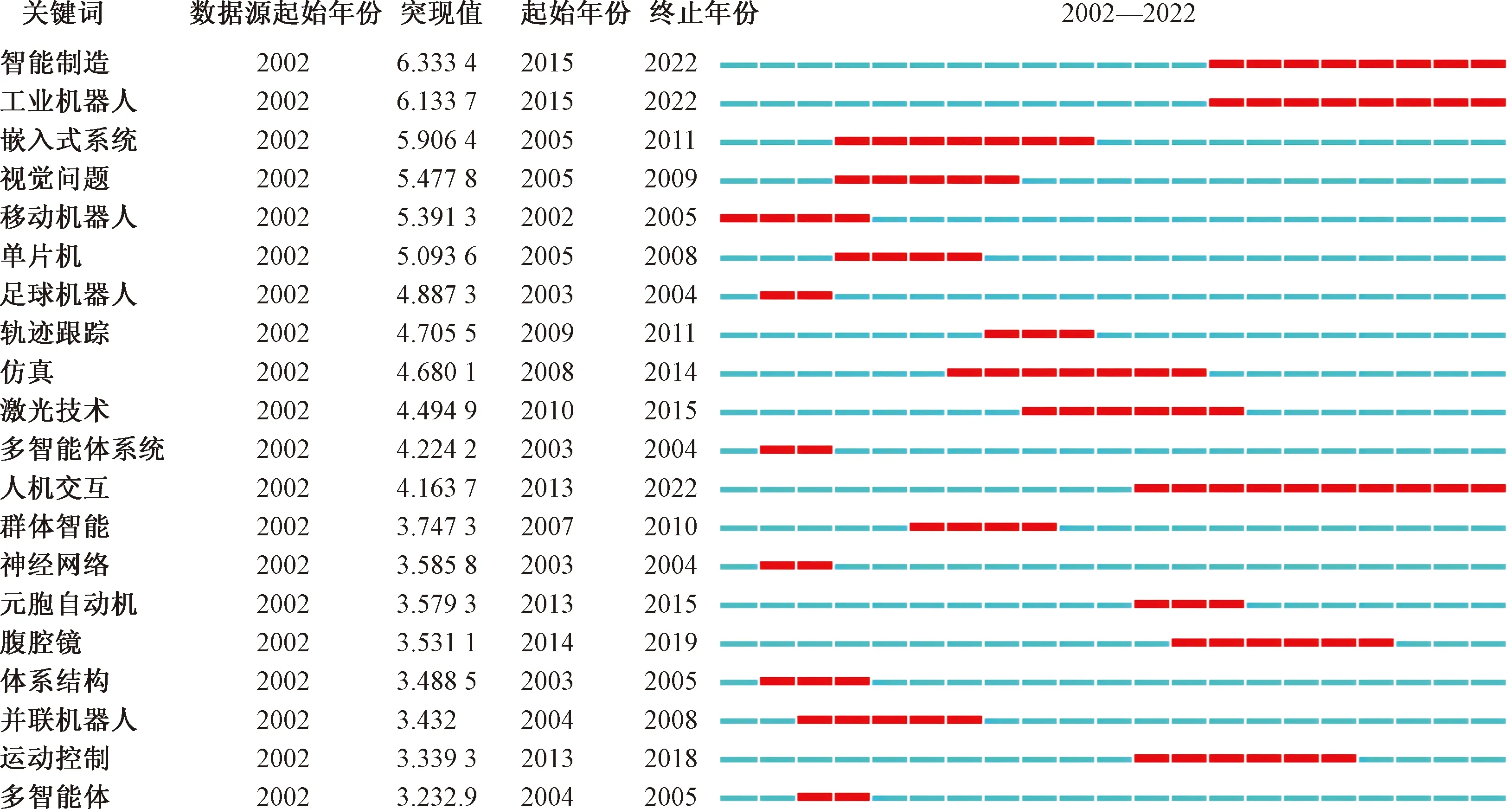
圖6 關(guān)鍵詞突現(xiàn)圖Fig.6 Burst term of keywords
通過總結(jié)分析突現(xiàn)詞時間區(qū)間范圍、突現(xiàn)詞所代表的相關(guān)文獻(xiàn)概要內(nèi)容,將探究出的20 個突現(xiàn)詞劃分為兩部分,總結(jié)歸納不同年度區(qū)間內(nèi)中國智能機器人領(lǐng)域相關(guān)的研究前沿。第一部分為2002—2014 年,第二部分為2015—2022 年。
2002—2014 年研究前沿按照基礎(chǔ)理論、關(guān)鍵技術(shù)、應(yīng)用3個方面進(jìn)行總結(jié)歸納。基礎(chǔ)理論方面包括多智能體、神經(jīng)網(wǎng)絡(luò)、體系結(jié)構(gòu)、群體智能、元胞自動機等;關(guān)鍵技術(shù)方面包括嵌入式系統(tǒng)、視覺伺服、單片機、軌跡跟蹤、仿真、激光技術(shù)、運行控制;應(yīng)用方面包括移動機器人、足球機器人、多智能體系統(tǒng)、并聯(lián)機器人等。
2015—2022 年研究前沿包括智能制造、工業(yè)機器人、人機交互、腹腔鏡等。可以看出,隨著機器人技術(shù)的成熟發(fā)展,逐步在工業(yè)領(lǐng)域得到廣泛應(yīng)用,并拓展到服務(wù)、醫(yī)療、軍工等領(lǐng)域。本文重點對2015—2022年的突現(xiàn)詞所代表的前沿?zé)狳c進(jìn)行分析。
(1)智能制造:中國的國民經(jīng)濟主要支柱為制造業(yè),在由“制造大國”向“制造強國”轉(zhuǎn)變的關(guān)鍵時期,智能機器人領(lǐng)域研究能夠有效支撐中國智能制造發(fā)展。一方面包括機器視覺、自然語言處理、機器學(xué)習(xí)、深度學(xué)習(xí)、群體智能等核心技術(shù)的研究應(yīng)用,能夠助力推進(jìn)中國在智能機器人領(lǐng)域的核心技術(shù)與部件的創(chuàng)新突破;一方面以智能制造應(yīng)用需求為牽引的工業(yè)機器人和服務(wù)機器人的研究推進(jìn),能夠助力中國生產(chǎn)制造模式的顛覆式發(fā)展,有效提升生產(chǎn)效率以及優(yōu)化需求結(jié)構(gòu)。
(2)工業(yè)機器人:工業(yè)機器人作為智能機器人的重要組成部分,能夠根據(jù)設(shè)定的程序開展自動化作業(yè),包括焊接、噴涂、組裝、采集、放置、產(chǎn)品檢測和測試等,其應(yīng)用研究對中國工業(yè)發(fā)展起到至關(guān)重要的作用。由圖6可知,工業(yè)機器人在2015—2022年持續(xù)作為智能機器人領(lǐng)域的研究前沿。本文結(jié)合關(guān)鍵詞共現(xiàn)出現(xiàn)頻次較高的相關(guān)關(guān)鍵詞,以農(nóng)業(yè)應(yīng)用為例開展研究概述。農(nóng)業(yè)機器人研究包括采摘機器人、耕耘機器人、除草機器人以及農(nóng)藥機器人等多種類型,核心部件與技術(shù)包括機械手臂、壓力傳感器以及三維視覺傳感器等,結(jié)合路徑規(guī)劃、機器視覺、人機協(xié)同技術(shù)的發(fā)展,可實現(xiàn)全自動化作業(yè)模式,能夠有效節(jié)省人力物力,并顯著提升生產(chǎn)效率。
(3)腹腔鏡:隨著技術(shù)的快速發(fā)展,服務(wù)機器人研究逐漸成為前沿?zé)狳c,以突現(xiàn)詞“腹腔鏡”為例展開分析,代表了智能機器人醫(yī)療領(lǐng)域應(yīng)用研究前沿。醫(yī)療機器人方面,通過其在操作精準(zhǔn)度高的優(yōu)勢,又有效提升手續(xù)效果,包括出血量少、傷口恢復(fù)快等優(yōu)勢,同時,可協(xié)助醫(yī)生開展微創(chuàng)手術(shù)。
(4)人機交互:隨著智能機器人在工業(yè)生產(chǎn)、醫(yī)療、特種作戰(zhàn)等方面的成熟應(yīng)用,人機協(xié)同性的應(yīng)用需求逐漸迫切,并逐漸成為研究前沿。由圖6可知,人機交互是20 個關(guān)鍵詞中持續(xù)時間最長的突現(xiàn)詞。如在工業(yè)機器人方面,開展包括自然語言、圖像識別、語音識別等在內(nèi)的人工智技術(shù)研究,支持更加智能化、人性化的交互方式,即可獨立執(zhí)行重復(fù)性工作,亦能夠在特定場景下與工人進(jìn)行協(xié)作,生產(chǎn)效率和安全生產(chǎn)兼顧。
關(guān)鍵詞時間線如圖7所示。右側(cè)的標(biāo)號部分是關(guān)鍵詞聚類結(jié)果,共包含10 類標(biāo)簽。分別為#0機器人、#1智能機器人、#2采摘機器人、#3工業(yè)機器人、#4離線編程、#5人工智能、#6人機交互、#7學(xué)習(xí)控制、#8嵌入式系統(tǒng)和#9圖像識別。左側(cè)顯示了每一類聚類集群內(nèi)關(guān)鍵詞基于時間軸的相互共現(xiàn)關(guān)系,一定程度上展示出智能機器人領(lǐng)域的發(fā)展脈絡(luò)與趨勢。
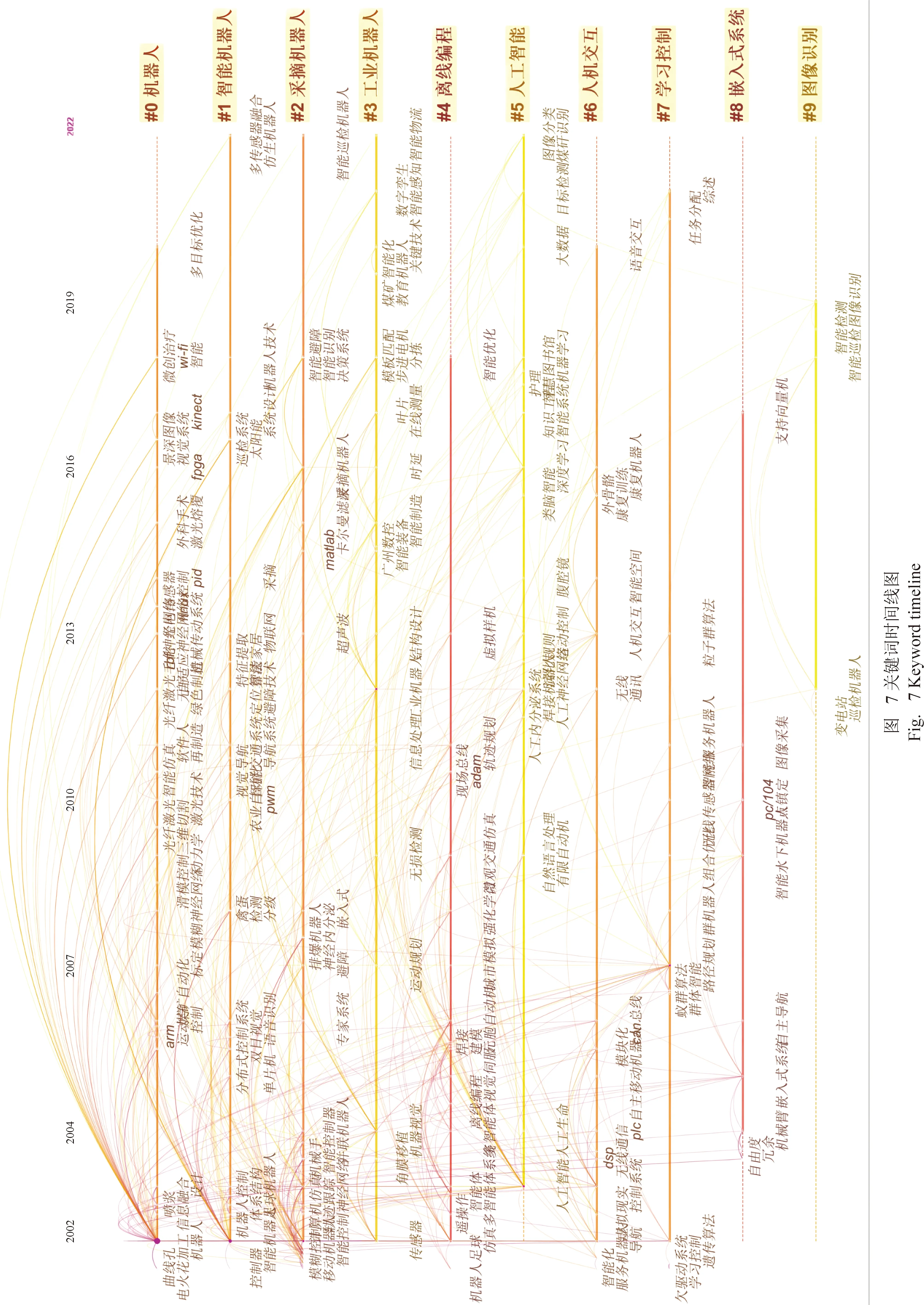
對于每一類聚類集群,選取頻次排名前5的關(guān)鍵詞進(jìn)行統(tǒng)計分析。其中,#0機器人集群包含的關(guān)鍵詞為機器人、激光技術(shù)、設(shè)計、控制、運動學(xué);#1智能機器人集群包含的關(guān)鍵詞為智能機器人、單片機、足球機器人、語音識別、體系結(jié)構(gòu);#2采摘機器人集群包含的關(guān)鍵詞為智能控制、移動機器人、神經(jīng)網(wǎng)絡(luò)、采摘機器人、模糊控制;#3工業(yè)機器人集群包含的關(guān)鍵詞為傳感器、機器視覺、工業(yè)機器人、智能制造、運動規(guī)劃;#4離線編程集群包含的關(guān)鍵詞為元胞自動機、仿真、多智能體系統(tǒng)、視覺伺服、智能體;#5人工智能集群包含的關(guān)鍵詞為人工智能、深度學(xué)習(xí)、腹腔鏡、運動控制、目標(biāo)檢測;#6人機交互集群包含的關(guān)鍵詞為控制系統(tǒng)、人機交互、導(dǎo)航、服務(wù)機器人、plc;#7學(xué)習(xí)控制集群包含的關(guān)鍵詞為路徑規(guī)劃、遺傳算法、群體智能、蟻群算法、學(xué)習(xí)控制;#8嵌入式系統(tǒng)集群包含的關(guān)鍵詞為嵌入式系統(tǒng)、智能水下機器人、機械臂、冗余、支持向量機;#9圖像識別集群包含的關(guān)鍵詞為巡檢機器人、圖像識別、變電站、智能巡檢、智能檢測。
3 結(jié)論
采用CiteSpace軟件對CNKI數(shù)據(jù)庫收錄的智能機器人領(lǐng)域相關(guān)的2 258 篇期刊文獻(xiàn)進(jìn)行了年度發(fā)文量、期刊分布、研究機構(gòu)分布及合作關(guān)系、關(guān)鍵詞共現(xiàn)及聚類、突現(xiàn)詞及時間線等可視化分析,得出以下結(jié)論與啟示。
(1)近20年智能機器人領(lǐng)域的研究發(fā)文量總體上呈現(xiàn)穩(wěn)中有升的發(fā)展趨勢。尤其是2017—2021 年的近5 年期間,年度發(fā)文量呈現(xiàn)出明顯增長趨勢,年度平均發(fā)文量約為156 篇。中國于2016年發(fā)布的《機器人產(chǎn)業(yè)發(fā)展規(guī)劃(2016—2020年)》,指出機器人產(chǎn)業(yè)發(fā)展要推進(jìn)重大標(biāo)志性產(chǎn)品率先突破,一定程度上說明在國家相關(guān)政策的支持下,推動了國內(nèi)智能機器人領(lǐng)域的研究發(fā)展。國家政策的支持對于領(lǐng)域的研究發(fā)展起到重要的推動作用。
(2)智能機器人領(lǐng)域發(fā)文涉及的文獻(xiàn)期刊分布跨度較大,體現(xiàn)出該領(lǐng)域具備多領(lǐng)域交叉學(xué)科特點,且研究機構(gòu)核心研究群體展現(xiàn)出跨域合作并形成高校、研究院與企業(yè)協(xié)同研究的關(guān)系。
(3)本文綜合分析關(guān)鍵詞共現(xiàn)、關(guān)鍵詞聚類、突現(xiàn)詞以及關(guān)鍵詞時間線圖結(jié)果,并對中國智能傳感器研究熱點進(jìn)行歸納總結(jié)。中國智能機器人領(lǐng)域研究熱點主要分為智能機器人應(yīng)用和關(guān)鍵核心技術(shù)兩大類。其中應(yīng)用方面的研究熱點包括工業(yè)機器人、采摘機器人、智能水下機器人、移動機器人、巡檢機器人、機械臂等。關(guān)鍵核心技術(shù)方面的研究熱點包括機器視覺、多傳感器信息融合、仿真、人工智能、多智能體系統(tǒng)、路徑規(guī)劃以及人機交互等,覆蓋智能機器人從信息的感知獲取、判斷、決策到行動的全自動化流程。
猜你喜歡
體育科技文獻(xiàn)通報(2022年3期)2022-05-23 13:46:54
天津外國語大學(xué)學(xué)報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
表面工程與再制造(2019年6期)2019-08-24 06:40:04
民用飛機設(shè)計與研究(2019年4期)2019-05-21 07:21:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
