海上風電混合級聯直流輸電系統直流短路故障分析與隔離
2023-03-24 11:21:08胡雋璇彭國榮邸世民唐治平
電力系統及其自動化學報 2023年2期
胡雋璇,彭國榮,邸世民,向 往,王 濤,唐治平
(1.中國電建集團中南勘測設計研究院有限公司,長沙 410014;2.強電磁工程與新技術國家重點實驗室(華中科技大學),武漢 430074)
隨著化石燃料的大量消耗,全球變暖不斷加劇,世界各主要經濟體為應對氣候變化,從實際出發制定了相應的“碳達峰”、“碳中和”戰略[1-3]。我國海上風電資源豐富,具有適宜大規模開發、利用小時數高、靠近負荷中心等優點,其開發與利用是我國應對氣候變化、推進能源轉型升級的重要組成部分[4]。近年來,全球海上風電發展呈現規模化、集群化和深遠海化的特點。依據全球風能理事會發布的2021年風電發展報告,2020年全球新裝機海上風電達6.1 GW,預計到2025年全球海上風電總裝機容量達105 GW[5]。
目前海上風電的并網方式有高壓交流HVAC(high voltage alternating current)傳輸、分頻傳輸系統FFTS(fractional frequency transmission system)和高壓直流HVDC(high voltage direct current)傳輸三種[6]。高壓交流輸電具有結構相對簡單、技術成熟的優勢,但受電纜充電電流和充電功率的影響,一般適用于近海、小容量風電的并網。分頻傳輸通過降低頻率的方式,克服了電纜載流量的限制,延長了海上風電的傳輸距離,但缺乏工程實踐,其可行性、可靠性尚待驗證。高壓直流輸電可避免電纜電容的影響,被廣泛應用于深遠海大規模海上風電傳輸[7-8]。
基于模塊化多電平換流器MMC(modular multilevel converter)的HVDC(MMC-HVDC)輸電技術不存在換相失敗問題,運行調控靈活,適用于海上風電場黑啟動[9],被廣泛應用于海上風電并網工程,例如,德國HelWin 1-2、DolWin 1-6和英國Sofia、Dogger bank等多個海上風電并網項目[10]。但MMC子模塊數量眾多,需建立大型海上換流站平臺,施工難度大、建設成本高[11],例如,國內±400 kV/1 100 MW級海上換流站平臺質量高達2.2×104t。針對MMCHVDC的問題,文獻[12]提出基于二極管整流器DR(diode rectifier,)的HVDC輸電技術(DR-HVDC),可降低換流站體積至20%,總投資降低至70%。但DR只能工作在不控整流狀態,無法建立海上風電場的交流電壓,由于電流的單相導通性,無法實現海上風電場的黑啟動。
針對上述問題,文獻[13]為充分發揮MMC控制裕度高和DR大容量、低成本的優勢,提出一種DR與MMC混合級聯多電壓等級直流輸電系統,闡述了系統控制策略設計,進行了海上風電場黑啟動、風電功率波動等工況的分析和仿真,但該文獻僅介紹了混合級聯多電壓等級直流輸電系統,而對系統的直流故障機理和故障隔離方法未做詳細說明。
目前關于柔性直流系統故障的研究,主要集中在岸上架空線遠距離送出場景,包括交流斷路器配合快速隔離開關、高壓直流斷路器和故障自清除功能換流器配合快速隔離開關等方法。文獻[14]對半橋MMC型柔性直流電網自適應限流控制進行研究,可減小系統直流短路電流峰值,但仍需配置直流斷路器以隔離直流故障線路;文獻[15]針對陸上兩端混合直流輸電系統,提出一種基于限流器和直流斷路器協調的故障隔離方法,可抑制故障電流并降低斷路器的耗散能量。由于海上平臺體積與重量限制,海上平臺一般不設置直流斷路器,因此上述方法均不適用于海上直流送出系統。針對海上風電柔直并網場景,文獻[16]研究了用于海上風電傳輸的雙極性直流輸電系統,并分析了系統發生永久性直流斷線故障情況下的故障特性,設計出故障保護策略及故障恢復策略,可有效抑制系統過電壓現象,使系統快速、穩定地恢復正常運行,但上述策略都無法應對系統直流短路故障產生的過流問題。
為解決上述問題,本文對海上風電混合級聯直流輸電系統的穩態運行進行潮流分析和控制設計,針對系統內三種直流故障進行故障分析和故障隔離方案設計,并在PSCAD/EMTDC仿真軟件上進行了仿真驗證。
1 海上風電混合級聯直流輸電系統
1.1 海上風電混合級聯直流輸電系統拓撲
針對目前海上風電直流輸電系統存在造價高、靈活性低等問題,為減少系統的投資成本和運行損耗,文獻[13]提出的DR與MMC混合級聯多電壓等級直流送出拓撲如圖1所示。
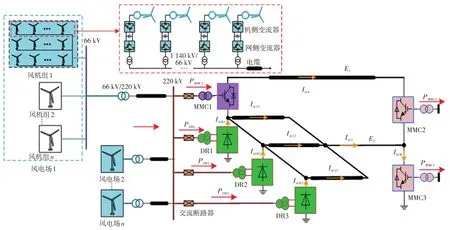
圖1 海上風電混合級聯型直流送出系統拓撲Fig.1 Topology of offshore wind power hybrid cascaded DC transmission system
直流輸電系統整流側由MMC換流站作為高壓閥組,3個并聯的DR換流站作為低壓閥組,高壓閥組和低壓閥組在交流側為并聯結構共同接入220 kV交流母線,在直流側為串聯結構;整流側與逆變側高壓閥組通過電壓等級為E1的直流電纜相連,整流側與逆變側低壓閥組通過電壓等級為E2的直流電纜相連,構成多電壓等級直流傳輸系統。上述方案充分利用二極管換流器大容量、低損耗和MMC控制運行靈活的優勢,通過換流器間交直流側串并聯設計,僅使用小功率MMC即可傳輸大額風電功率。
1.2 潮流分析
海上風電混合級聯系統整流側由MMC與DR換流器在直流側串聯,交流側接入同一交流母線。DR均采用12脈動換流器,在岸上換流站直流電壓及輸電線路參數固定的情況下,DR傳輸的有功功率由其交流母線電壓決定且與交流電壓正相關。當海上MMC換流站將交流電壓控制為恒定值時,DR換流站傳輸的有功功率將是固定的[17],即
式中:PDRi為第i個DR的有功功率,i=1,2,3;E2為DR直流電壓;UL為換流變壓器閥側空載線電壓;Xr為換流變壓器漏抗;Rdc為直流輸電線路電阻。
流經DR直流側總電流可表示為
式中,IdcRi為流經第i個DR的直流電流。
DR總有功功率PDR可表示為
直流海纜電壓之比k1及額定直流電流之比k2可表示為
式中:Idch為通過直流海纜E1的額定直流電流;Idcl為通過直流海纜E2的額定直流電流。
海上風電混合級聯系統整流側MMC1傳輸的有功功率PMMC1可表示為
MMC換流站與DR換流站在直流側串聯,依據基爾霍夫電流定律,系統送端高低壓閥組間的電流關系可表示為
MMC換流站與DR換流站在交流側并聯,共同接入由多片海上風電場匯集的交流母線。各個換流站的有功功率與風電基地出力之間的關系可表示為
式中,Pw為風電基地出力。
聯立式(3)~(7)可得風電場有功功率與MMC1換流站有功功率的關系為
當海上風電場的有功功率為2 500 MW、高低壓閥組間直流海纜電壓之比k1=2、額定電流之比k2=1/3時,MMC1的有功功率為500 MW,僅為海上風電場有功功率的1/5。
1.3 控制策略
為保證海上風電混合級聯直流輸電系統中海上換流站的穩定運行,岸上MMC換流站需為其建立穩定的直流電壓,因此采用外環定直流電壓和無功功率的矢量控制[18],其控制框圖如圖2所示。
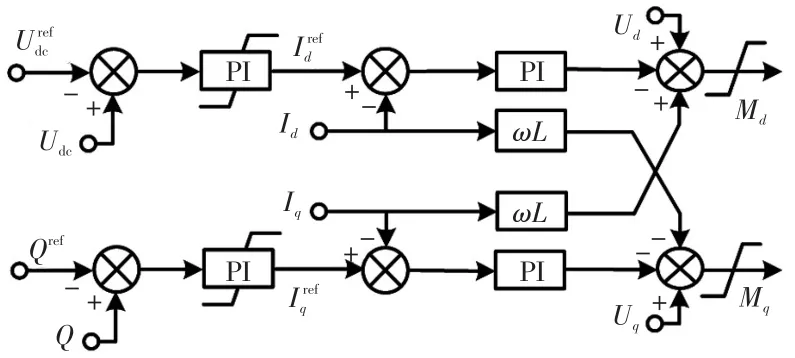
圖2 岸上MMC換流站控制策略Fig.2 Control strategy for onshore MMC station
由式(1)可知,在岸上換流站直流電壓維持穩定、輸電海纜參數固定的情況下,DR換流站傳輸的有功功率與其交流母線電壓正相關。因此,當海上電網母線交流電壓由海上MMC換流站控制為恒定值時,DR換流站傳輸的有功功率將是恒定的。海上風電場因風速變化產生的功率波動將由海上MMC換流站單獨承擔,在海上風電場送出的有功功率上升時,海上MMC換流站的可控器件會因過流而損壞;在海上風電場送出有功功率小于DR換流站額定有功功率時,海上MMC換流站會因維持海上交流電壓而導致潮流反轉。
因此,海上MMC換流站應具備對功率和交流電壓的控制能力,將海上風電場送出有功功率的偏差作為海上MMC換流站調控海上交流母線電壓的指令值,通過對海上交流母線電壓有效值的小幅度調整,實現對DR換流站有功功率的主動控制[19]。海上MMC換流站的功率和交流電壓控制環節可表示為
式中:kp為比例常數;ki為積分常數。
依據上述分析,海上MMC換流站的控制策略如圖3所示。
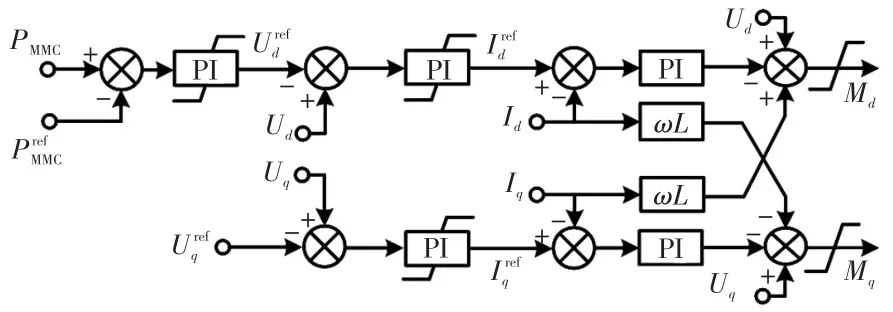
圖3 海上MMC換流站控制策略Fig.3 Control strategy for offshore MMC station
在此控制策略下,海上MMC換流站不僅為海上風電場和DR換流站提供了穩定的交流電壓,并實現了對DR換流站有功功率的主動控制。
正常運行時海上風電場采用跟網型控制策略,對海上MMC換流站建立的海上電網電壓Us進行采樣,依靠鎖相環PLL(phase locked loop)跟隨交流電網電壓頻率/相位角來實現電網同步,同時還通過控制饋入電網的電流來控制傳輸功率。當海上MMC換流站因故障或檢修退出運行時,海上交流電網將失去支撐,交流電壓頻率和幅值將發生紊亂,可能引起陸上電網功率缺額及系統解裂等問題。為保證海上風電場與陸上電網安全穩定運行,海上風電場需要由跟網型控制切換至構網型控制策略。當檢測到E1側直流海纜故障電流降為0后,海上風電場控制由標志位Flag=0切換至Flag=1,此時海上風電場的控制頻率自主生成,海上電網交流電壓由海上風電場建立,為DR換流站提供穩定的換相電壓。當檢測到MMC閉鎖信號解除時,海上風電場的控制可由標志位Flag=1切換回Flag=0,海上風電場繼續做跟網型控制。海上風電場控制策略切換如圖4所示。
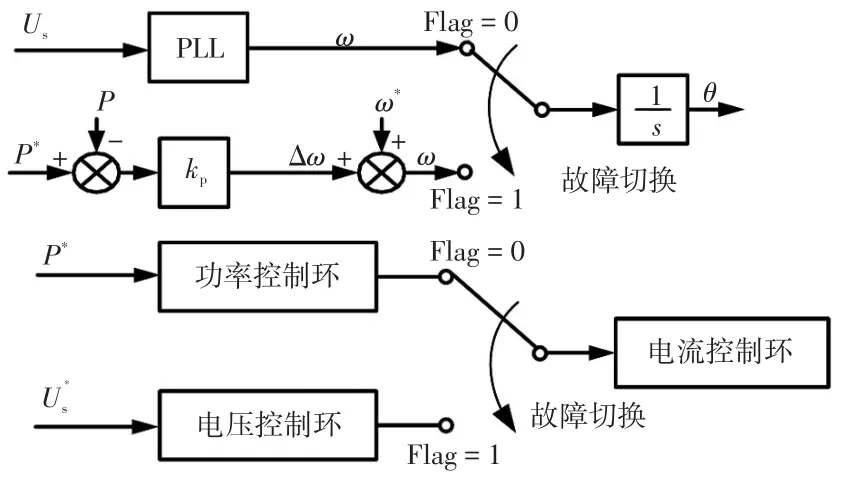
圖4 海上風電場控制策略切換Fig.4 Switching of control strategies for offshore wind farm
2 系統直流故障分析
海上風電混合級聯直流輸電系統直流故障類型按組成部分可分為換流器短路故障和直流海纜故障兩類。
受海上平臺限制,海上平臺一般不設置直流斷路器。當直流海纜發生短路故障時,直流電流將陡然上升,為隔離直流故障、保障海上設備,MMC可采用自阻型子模塊或全橋型子模塊,在直流故障時將子模塊閉鎖,從而阻斷短路電流進一步發展。為闡明故障隔離機理,本文以自阻型子模塊為例,對直流海纜出口短路故障和接地故障進行理論分析。
2.1 E1對E2出口短路故障
當直流海纜E1對E2出口發生短路故障時,直流海纜間的電壓差將迅速跌落,閉鎖MMC1全部自阻型子模塊,換流器所有的絕緣柵雙極型晶體管IGBT(insulated gate bipolar transistor)將處于關斷狀態,此時系統等效電路如圖5所示。取A、B兩相進行分析,圖5中的實線為MMC1換流器ia>0時潛在的一種故障電流導通路徑。此時ia將經過A相上橋臂的Larm、Da1、Carm、Da2,以及直流正極的Ldc、故障點和B相下橋臂的構成故障電流通路。
設子模塊額定電容電壓為UC,MMC直流側電壓為Udch,每相橋臂額定子模塊數目為N,子模塊電容電壓UC=(E1-E2)/N。
每相橋臂等效電容電壓Uarm為
式中,UCi為單相橋臂第i個子模塊的輸出電壓。
記圖5中,A相第i個子模塊電容電壓為Ua_Ci;A相上橋臂電容電壓之和為Ua_up;B相第i個子模塊電容電壓為Ub_Ci;B相下橋臂電容電壓之和為Ub_dn。則它們的關系可表示為
在圖5所示故障電流通路上,二極管承受的正向電壓Udio可表示為
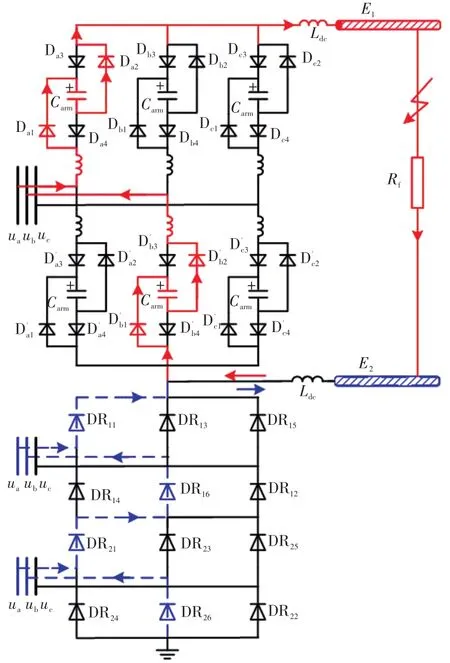
圖5 E1對E2出口短路故障系統等效電路Fig.5 Equivalent circuit of system underE1-to-E2shortcircuit fault
式中,uab為交流側A、B線電壓峰值。
二極管承受的正向電壓極值可表示為
式中,Uab為閥側線電壓峰值。
在穩態運行時,線電壓峰值Uab與直流側電壓Udch的關系[20]可表示為
式中,M為電壓調制比。
由于自阻型MMC的調制比0<M≤1,則式(13)可改寫為
由式(14)可知,等效電路中二極管承受反向電壓而無法導通,圖5中的潛在故障電流流通路徑實際上無法導通。由上述分析可知,當直流海纜E1對E2出口發生短路故障時,自阻型MMC在閉鎖后具有阻斷直流故障電流的能力,可將E1對E2出口短路故障隔離。
在直流海纜E1對E2出口發生短路故障后,海上MMC1換流站與岸上MMC2換流站將全部子模塊閉鎖,使故障隔離。圖5中的虛線為12脈波DR換流器A、B相同且導通時的電流路徑。岸上MMC3保持定直流電壓控制方式,維持直流海纜E2電壓穩定。在風機切換為構網型控制,穩定海上交流電壓后,系統整流側低壓閥組DR換流站可正常運行,不受故障影響。
2.2 直流海纜E1對地短路故障
圖1中的海上風電混合級聯直流輸電系統包含4條直流海纜,其中,與MMC正極相連的直流海纜電壓為E1;3條與DR換流站正極相連的直流海纜電壓為E2。
當直流海纜E1發生對地短路故障后,自阻型MMC將全部閉鎖,所有的IGBT被關斷,系統等效電路如圖6所示。
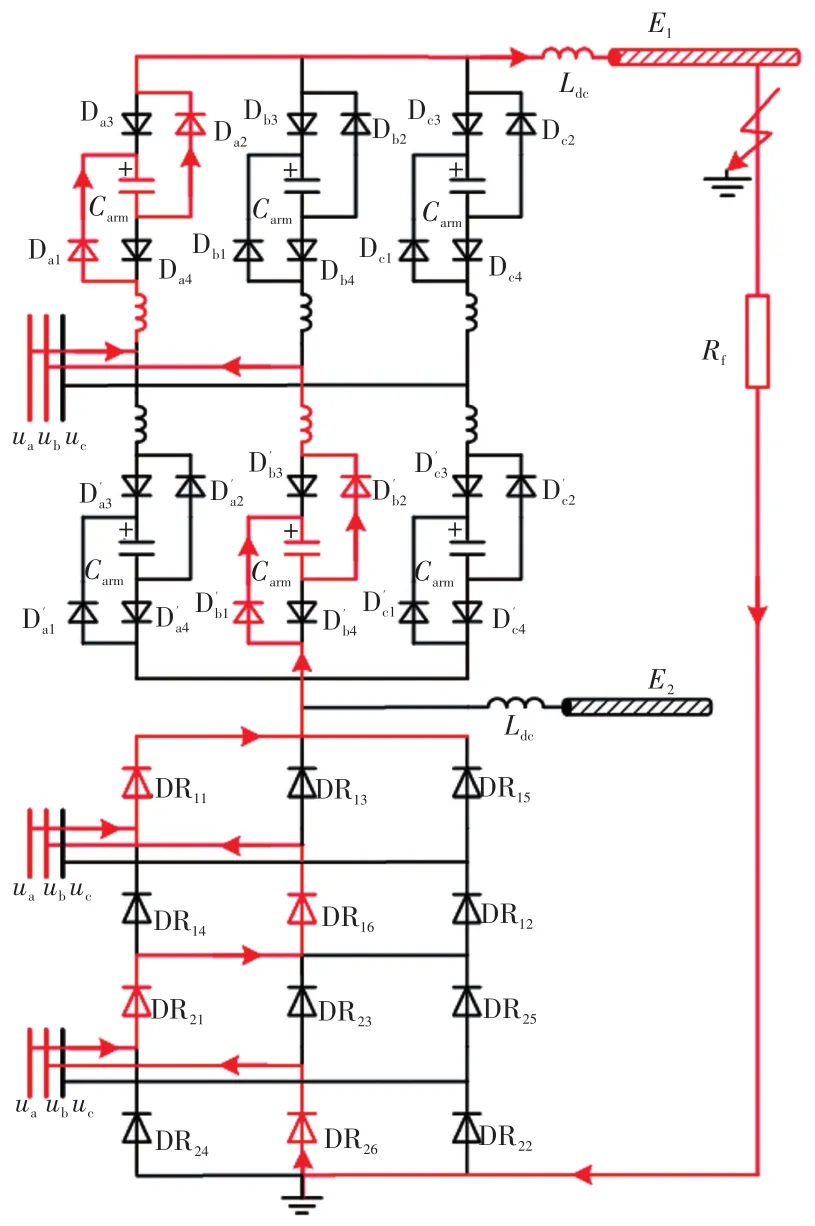
圖6 直流海纜E1故障系統等效電路Fig.6 Equivalent circuit of system under DC submarine cableE1fault
以A、B兩相進行分析,圖6為ia>0時潛在的一種故障電流導通路徑。此時ia將同樣經過A相上橋臂的Larm、Da1、Carm、Da2,以及直流正極的Ldc、故障點、DR換流站和B相下橋臂的,而構成故障電流通路。由于自阻型子模塊閉鎖后,子模塊電容只能正向充電,閉鎖后的電容電壓將大于閉鎖前電容電壓。
由分析可得二極管承受的正向電壓為
二極管始終承受反向電壓,圖6中的潛在故障電流流通路徑實際上無法導通。由上述分析可知,當直流海纜E1發生對地短路故障時,自阻型MMC在閉鎖后具有阻斷直流故障電流的能力,可將直流海纜E1對地短路故障隔離,但MMC子模塊電容存在過壓風險。
2.3 直流海纜E2故障
當直流海纜E2發生對地短路故障后,自阻型MMC將全部閉鎖,所有的IGBT被關斷,系統等效電路如圖7所示。
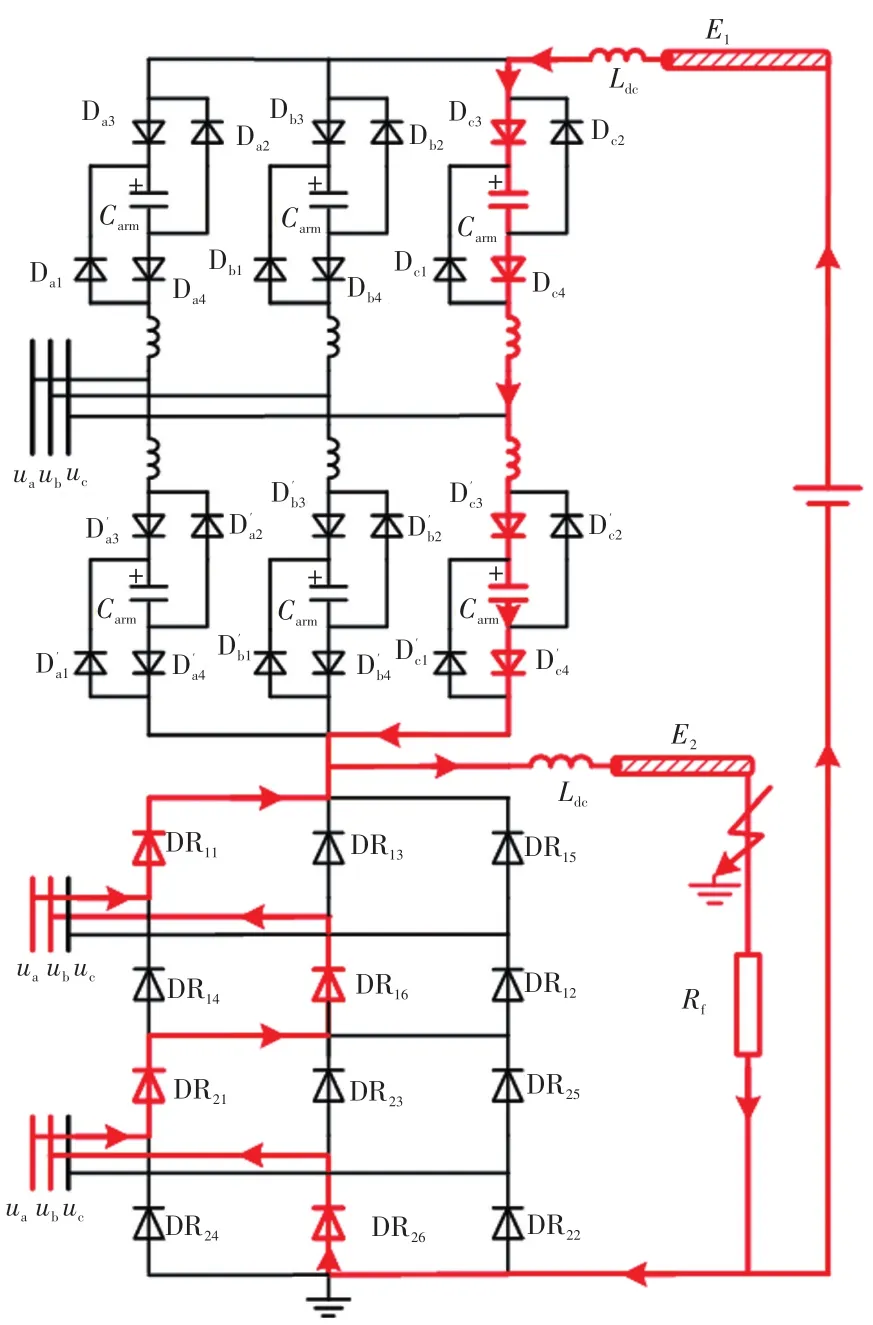
圖7 直流海纜E2故障系統等效電路Fig.7 Equivalent circuit of system under DC submarine cableE2fault
以自阻型MMC的C相橋臂和DR的A、B兩相進行分析,圖7為潛在的一種故障電流I1導通路徑。此時故障電流將經過直流海纜E1、直流正極的 Ldc和C相上橋臂的Dc3、Carm、Dc2、Larm,以及DR換流站和C相下橋臂的及故障點,而構成故障電流通路。由于自阻型子模塊閉鎖后,子模塊電容只能正向充電,閉鎖后的電容電壓將大于閉鎖前電容電壓。
由分析可知,二極管承受的正向電壓可表示為
二極管始終承受反向電壓,圖7中的潛在故障電流I1流通路徑實際上無法導通。由上述分析可知,當直流海纜E2發生對地短路故障時,自阻型MMC在閉鎖后具有阻斷直流海纜E1與E2故障電流的能力,可將直流海纜E2對地短路故障與直流海纜E1隔離。與E1故障類似,MMC子模塊電容亦存在過壓風險。
故障電流I2導通路徑上的二極管承受的正向電壓可表示為
二極管承受正向電壓,故障電流I2的流通路徑無法阻斷,因此在當直流海纜E2發生對地短路故障后應斷開DR交流側斷路器,從而阻斷故障電流進一步發展。
3 直流故障隔離策略
由第2節故障分析可知,當海上風電混合級聯直流輸電系統直流側發生E1對E2出口短路故障、直流海纜E1對地短路故障和直流海纜E2對地短路故障時,具備故障自清除能力的MMC換流站閉鎖后,子模塊電容將只充電而不放電,可能導致子模塊電容電壓過高而被擊穿,因此需對海上MMC換流站的故障自清除型子模塊進行配比設計。
在子模塊閉鎖時間相同的情況下,海上風電混合級聯直流輸電系統發生直流海纜E1出口對地短路故障時,流經MMC1的直流電流峰值最大,因此以該故障為例,假設直流電流只從單相橋臂流過,對橋臂電容電壓的最大值進行理論計算,并依據子模塊電容的安全裕度,進行配比設計。
記MMC橋臂電感為Larm,直流出口電感為Ldc,則等效電感為;記MMC橋臂電阻為Rarm,直流線路電阻為Rdc,故障電阻為Rf,則等效電阻;等效時間常數τeq=Leq/Req,由直流故障發生至自阻型MMC閉鎖,直流短路電流idc[14]可表示為
式中,Idc為系統穩態直流電流。
由式(19)可知,在自阻型MMC閉鎖時刻,直流短路電流達到最大值Imax,此時橋臂電抗器中存儲的能量[21]可表示為
假設橋臂電感儲能全部都饋入單相橋臂等效電容Carm中,則橋臂等效電容最大值可表示為
自阻型MMC每個橋臂共包括N個子模塊,每個子模塊的額定電容電壓UC0可表示為
工程上為提升系統輸電可靠性,子模塊電容額定電壓UCN一般大于其設計的工作電壓UC0。以如東海上換流站為例,其子模塊電容額定電壓為2.8 kV,設計工作電壓為2 kV,參照IEC 61071-2017對電容器過壓標準,以1.3倍額定電壓為例,如東海上換流站子模塊電容短時可耐受的理論最大電壓為3.64 kV,安全裕度達到82%。以此為標準,設橋臂子模塊冗余數為Nr,可得
式中,UC_max為子模塊電容電壓最大值。
表1為多電壓等級混合級聯直流輸電系統換流站仿真參數。以表1中參數為例,當海上MMC換流站正極出口處對地金屬性短路故障,2 ms子模塊閉鎖后,直流故障電流達到最大峰值,由式(19)~(21)計算可得 Imax=15.9 kA、UC_max=463 kV,再由式(23)可得,單相橋臂子模塊冗余數為Nr=2。考慮到MMC通常配置8%的冗余子模塊,因此無需再額外配置。
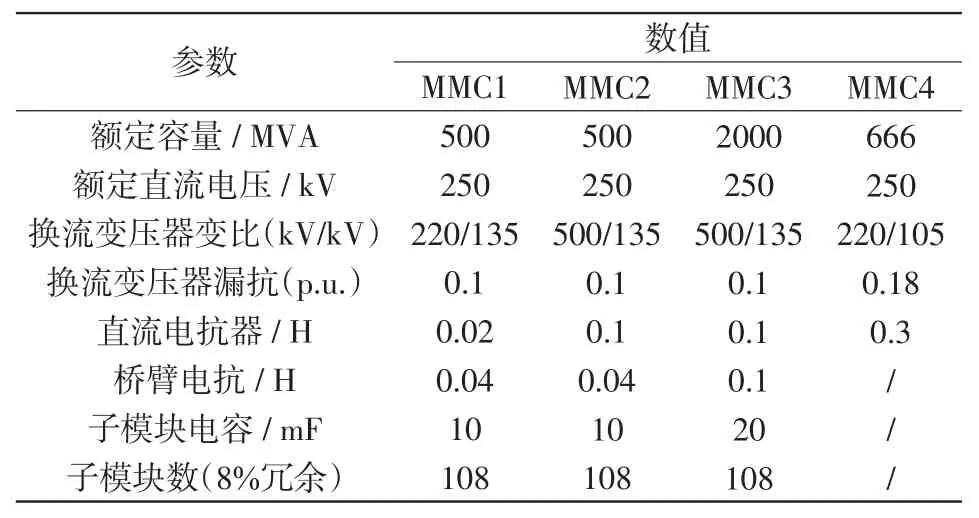
表1 換流站仿真參數Tab.1 Simulation parameters of converter station
當海上風電混合級聯直流輸電系統發生直流海纜E2出口對地短路故障時,流經MMC1的直流電流將發生反向;當直流故障發生至自阻型MMC閉鎖時,直流短路電流可表示為
由于MMC直流電流反轉,在閉鎖前子模塊已進入正向充電狀態,同樣假設橋臂電感儲能全部都饋入單相橋臂等效電容中,則橋臂等效電容最大值需要在式(21)基礎上進行修正,即
當直流海纜E2出口對地短路故障、MMC換流站經2 ms子模塊閉鎖后,直流故障電流達到最大峰值,由式(24)、(25)計算可得 Imax=4.8 kA、UC_max=373 kV,再通過式(23)可得單相橋臂子模塊冗余數為Nr=-18,因此僅需配置72個具備故障自清除能力子模塊即可實現故障隔離。
綜上所述,針對混合級聯直流輸電系統直流短路接地故障,海上MMC換流站除了需要采用100%具備故障自清除能力的子模塊外,還需冗余配置2%具備故障自清除能力的子模塊。
在海上風電混合級聯直流輸電系統發生直流海纜間短路故障和直流海纜E1對地短路故障時,通過海上MMC換流站與快速隔離開關的配合控制,可快速完成故障隔離。在系統直流故障電流降為0后,海上風電場由跟網型控制切換為構網型控制策略,系統可運行在DR-HVDC模式。在海上風電混合級聯直流輸電系統發生直流海纜E2對地短路故障時,海上MMC換流站直流側電流和電壓都會發生反轉,通過對海上MMC換流站與快速隔離開關的控制配合,同樣可以實現故障隔離。此時,海上風電場仍保持跟網型控制策略不變,系統可運行在MMC-HVDC模式。
4 仿真驗證
本文在PSCAD/EMTDC仿真平臺中搭建圖1所示的混合級聯直流輸電系統和圖2、圖3所示的控制系統;采用具備故障自清除能力的自阻型MMC作為高壓閥組與低壓閥組DR串聯;系統參數見表1。在仿真模型中,將風電場等效為5臺等值風機組,每臺等值風電機組經海上交流升壓站匯集升壓后,與混合級聯換流站相連,直流海纜E1為500 kV、E2為250 kV。為盡量消除諧波對系統穩定運行的影響,在DR換流站的交流側與直流側均設置了濾波裝置[22]。
4.1 E1對E2出口金屬性短路故障
海上風電混合級聯直流輸電系統直流海纜E1對E2出口處發生金屬性短路故障的仿真波形如圖8所示。在t1=2.000 s時,直流海纜E1對E2出口處發生金屬性短路故障,由圖8(a)可以看出,流經直流海纜E1的直流電流迅速上升,MMC子模塊電容向故障點放電,電容電壓下降;在t2=2.002 s時,采用自阻型子模塊的MMC1換流站閉鎖,自阻型子模塊電容負投入,流經直流海纜E1的直流電流開始迅速下降,在2 ms后降為0,將直流海纜E1對E2出口短路故障隔離。由于橋臂電感的續流作用,負投入的子模塊電容將處于充電狀態,電容電壓隨之增大。由于各橋臂電流過零點時刻不同,導致各橋臂等效電容電壓終值不同。設上橋臂等效電容電壓為Uup_eq、下橋臂等效電容電壓為Udn_eq,由圖8(b)~(d)可知,B相下橋臂等效電容電壓最高為308 kV,為工作電壓的1.14倍,在所設計的安全裕度范圍內。
在t3=2.1 s時,海上風電場切換至構網型控制策略[23],有功功率下降至1 500 MW,系統切換為DR-HVDC運行。受直流海纜E2額定電流限制,DR換流站降功率運行。由圖 8(e)、(f)可知,切換控制后海上交流電網電壓能保持穩定,有效值較故障前略有降低。
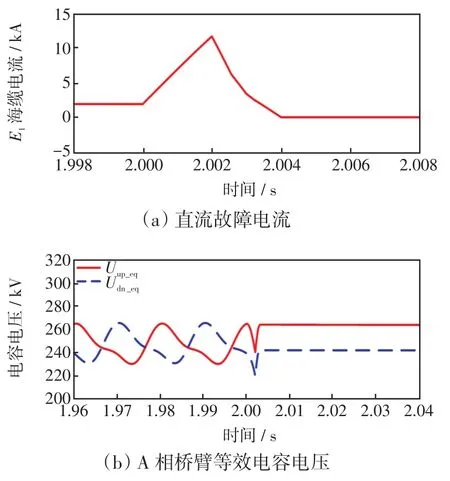
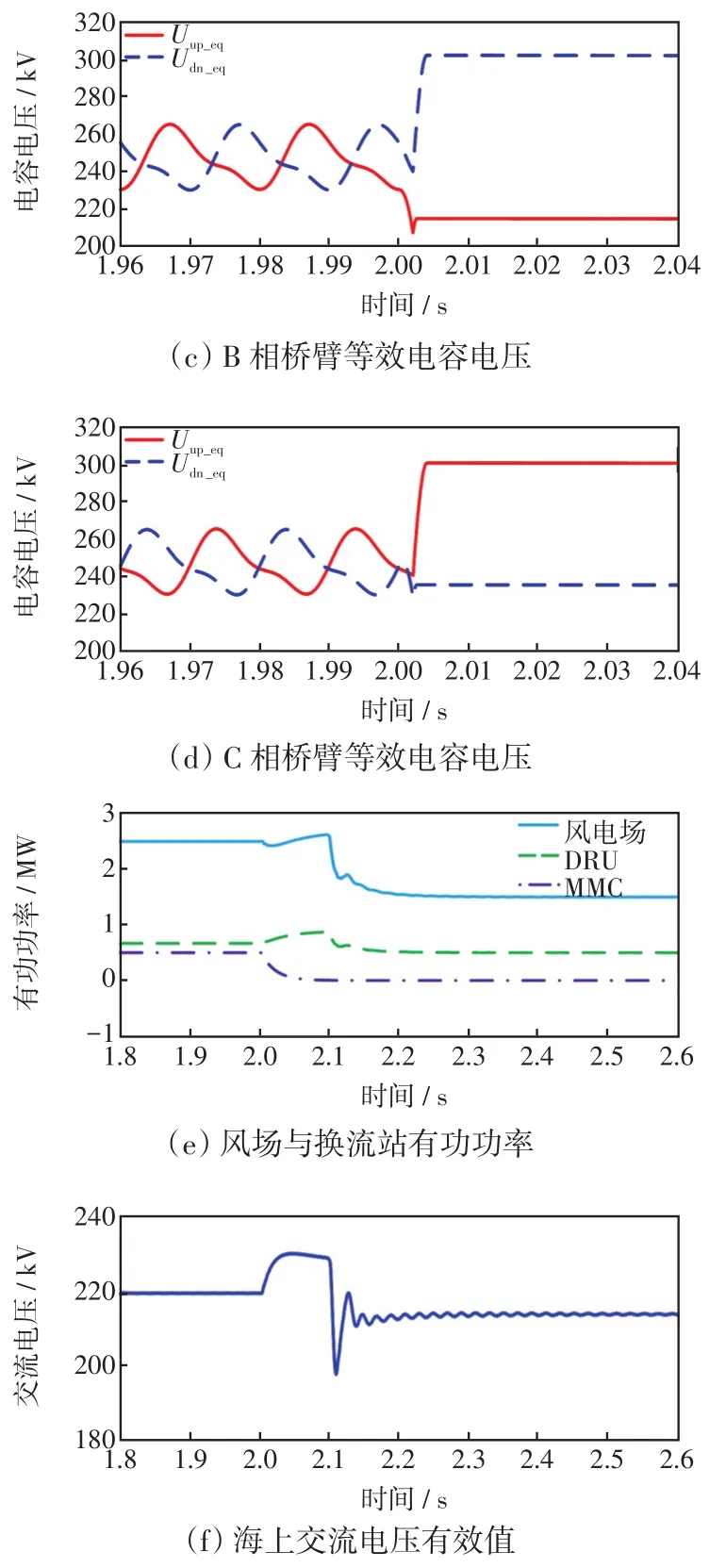
圖8 E1對E2出口短路故障仿真波形Fig.8 Simulation waveforms underE1-to-E2shortcircuit fault
4.2 E1對地金屬性短路故障
海上風電混合級聯直流輸電系統直流海纜E1發生對地金屬性短路故障的仿真波形如圖9所示。在t1=2.000 s時,直流海纜E1發生金屬性短路故障,由圖9(a)可以看出,流經直流海纜E1的直流電流迅速上升,MMC子模塊電容向故障點放電,電容電壓下降;在t2=2.002 s時,采用自阻型子模塊的MMC1換流站閉鎖,自阻型子模塊電容負投入,流經直流海纜E1的直流電流從峰值19.3 kA開始迅速下降,在6 ms后降為0,將直流海纜E1對地金屬性短路故障隔離。由于橋臂電感的續流作用,負投入的子模塊電容將處于充電狀態,電容電壓隨之增大。由于各橋臂電流過零點時刻不同,導致各橋臂等效電容電壓終值不同。由圖 9(b)~(d)可知,B相下橋臂等效電容電壓最高,其值為432 kV,是工作電壓的1.60倍,在所設計的安全裕度范圍內。
在t3=2.1 s時,海上風電場切換至構網型控制策略,有功功率下降至1 500 MW,系統切換為DRHVDC運行[24]。受直流海纜E2額定電流限制,DR換流站降功率運行。由圖 9(e)、(f)可知,切換控制后DR-HVDC可正常運行,海上交流電網電壓能保持穩定,有效值較故障前略有降低。
圖9 E1對地金屬性故障仿真波形Fig.9 Simulation waveforms underE1-to-ground metallic fault
4.3 E2對地金屬性短路故障
海上風電混合級聯直流輸電系統直流海纜E2發生對地金屬性短路故障的仿真波形如圖10所示。在t1=2.000 s時,直流海纜E2發生金屬性短路故障,由圖10(a)可以看出,流經直流海纜E1的直流電流迅速下降,在2.000 4 s時電流發生反向;在t2=2.002 s時,采用自阻型子模塊的MMC1換流站閉鎖,自阻型子模塊電容負投入,流經直流海纜E1的直流電流從-4.5 kA開始下降,在12 ms后降為0,將直流海纜E2對地金屬性短路故障與直流海纜E1隔離。由于橋臂電感的續流作用,負投入的子模塊電容將處于充電狀態,電容電壓隨之增大。由于各橋臂電流過零點時刻不同,導致各橋臂等效電容電壓終值不同。由圖 10(b)~(d)可知,B相上橋臂等效電容電壓最高,其值為353 kV,是工作電壓的1.31倍,在所設計的安全裕度范圍內。
在t3=2.1 s時,DR交流斷路器動作,MMC1換流站解鎖,海上風電場有功功率下降至500 MW,系統切換為MMC-HVDC運行[25]。由圖 10(e)、(f)可知,系統切換后,子模塊解鎖,電容電壓恢復至額定值,MMC-HVDC可正常運行,系統各電氣量保持穩定。
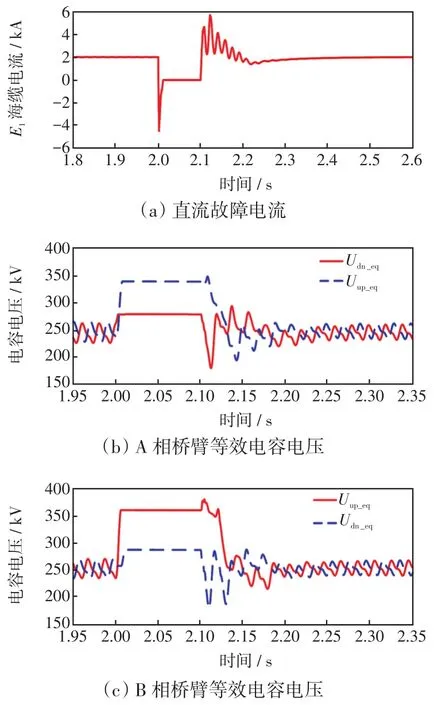
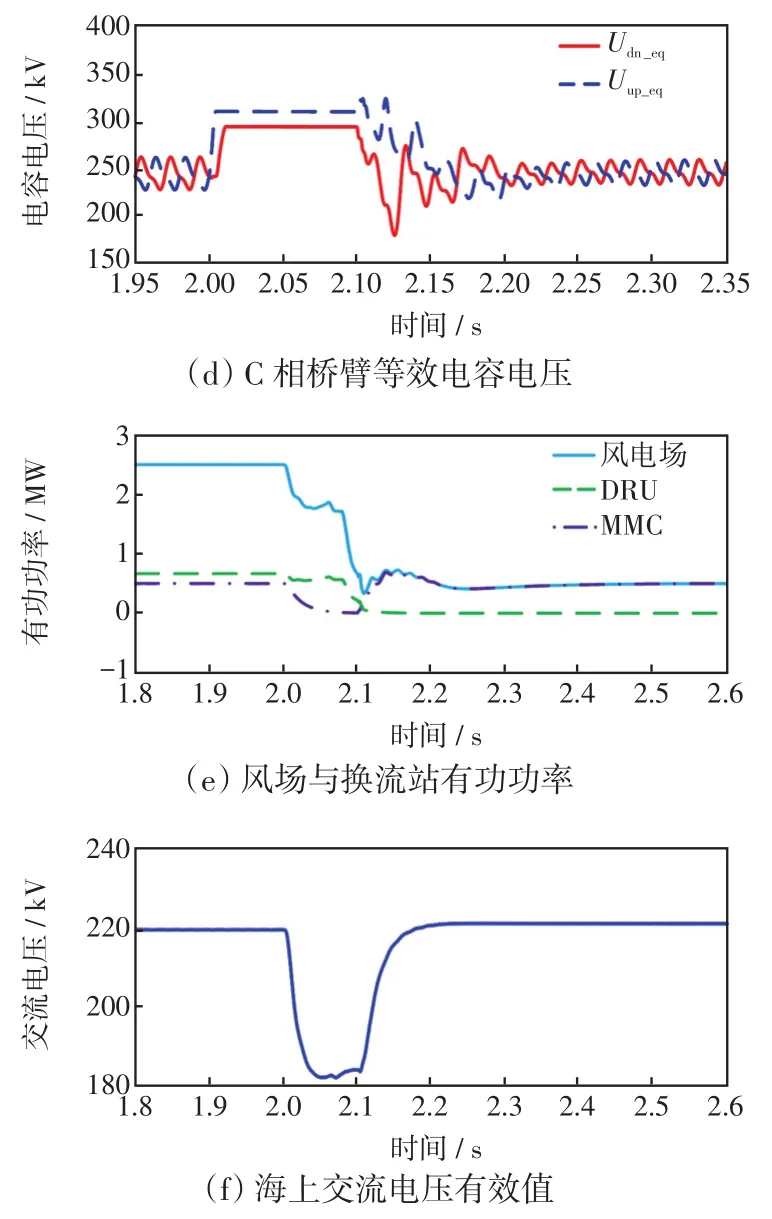
圖10 E2對地金屬性故障仿真波形Fig.10 Simulation waveforms ofE2-to-ground metallic fault
5 結論
海上風電混合級聯直流輸電系統通過直流側串聯結構,可用小容量的高壓閥組傳輸大額有功功率。本文針對系統三種典型故障進行分析和仿真,提出混合級聯直流輸電系統子模塊設計和直流故障隔離策略,得出如下結論。
(1)發生E1與E2線間短路故障和E1對地短路故障時,海上MMC需采用具備直流故障隔離能力的子模塊拓撲。風機需切換為構網型控制策略,此時海上風電混合級聯直流輸電系統切換為DRHVDC模式運行。
(2)發生E2對地短路故障時,海上MMC需先閉鎖,在DR交流集電系統交流斷路器斷開后再解鎖,此時海上風電混合級聯直流輸電系統切換為MMC-HVDC模式運行。
(3)為防止海上MMC換流站在隔離直流故障時產生電容過電壓問題,考慮混合級聯系統E1側直流海纜出口對地金屬性短路故障的極端情況,海上MMC換流站需采用100%具備故障自清除能力的子模塊,并冗余配置2%具備故障自清除能力的子模塊。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50