光伏并網逆變器參數性故障的VMD-WPE和MPA-LSTM診斷方法研究
2023-03-24 11:21:06張彼德余海寧羅榮秋
電力系統及其自動化學報 2023年2期
張彼德,余海寧,羅榮秋,張 錦,馮 京
(西華大學電氣與電子信息學院,成都 610039)
隨著全球日益嚴重的環境污染問題,以及化石能源的不斷減少和枯竭,太陽能光伏發電作為最具有可持續發展前景的一種可再生能源發電技術,得到國內外的普遍重視。光伏并網逆變器安全、穩定、可靠的運行對于光伏發電系統至關重要[1-2]。
在光伏并網逆變器中,故障主要分為參數性故障與結構性故障。結構性故障通常為電路元件損毀引起系統結構改變,造成電路運行狀態嚴重異常的情況[3],由電路元件開路或短路引起的結構性故障,故障特征較為明顯,對其故障診斷研究較多;參數性故障是指電路器件在各種工作應力作用下,發生性能劣化、參數退化從而產生的故障。對參數性故障診斷現有研究較少,且故障特征區分度差,不易進行故障診斷,因此,有必要對光伏并網逆變器參數性故障的診斷進行研究,以解決更實際的生產安全性問題[4]。文獻[5]針對飛跨電容型逆變器的參數性故障建立診斷鍵合圖模型,提出全局解析冗余關系的參數性故障診斷方法;文獻[6]針對光伏逆變器的參數性故障,利用小波分解提取變分模態分解 VMD(variational modal decomposition)后各模態分量的小波能量作為參數性故障特征量,再利用卷積神經網絡CNN(convolutional neural network)實現參數性故障診斷;文獻[7]對中性點鉗位型3電平光伏逆變器三相線電壓進行改進的變分模態分解后,利用小波分解求取模態分量的小波能量,作為參數性故障特征量,再利用支持向量機SVM(support vector machine)實現對其分壓電容參數性故障的診斷。目前,逆變器的參數性故障診斷大多針對開環系統,而對閉環系統的相關研究較少。由于閉環系統與開環系統的控制方式區別較大,現有的參數性故障診斷方法難以直接應用,需做進一步研究。
本文針對兩級三相光伏并網逆變器直流母線電容的參數性故障,以三相橋臂中間點的線電壓為原始數據,采用基于變分模態分解的小波包能量VMD-WPE(variational madal decomposition-wavelet packet energy)特征提取方法,即采用樣本熵優化VMD的模態數后,利用小波包分解提取各變分模態分量的小波包能量WPE(wavelet packet energy)作為故障特征向量;利用海洋捕食者算法MPA(marine predators algorithm)對長短期記憶LSTM(long short-term memory)神經網絡進行超參數尋優,構成海洋捕食者算法優化長短期記憶MPA-LSTM(marine predators algorithm-long short-term memory)神經網絡模型來實現故障的參數性辨識。
1 光伏并網逆變器參數性故障分析
圖1為兩級式三相光伏并網逆變器拓撲結構及控制策略圖。圖1中,逆變器采用兩級式結構和直流電壓外環、網側電流內環的雙閉環控制策略;兩級式三相光伏并網逆變器拓撲結構由DC-DC電路和DC-AC逆變電路組成。其中,L、T、D1、Cdc構成前級DC-DC功率變換電路,實現光伏陣列的最大功率點跟蹤控制MPPT(maximum power point tracking)[8],同時將光伏陣列輸出的電壓值轉換到后級逆變并網所需要的直流電壓值;后級為6個絕緣柵雙極型晶體管IGBT(Insulated Gate Bipolar Transistor)構成的三相橋式逆變電路實現并網控制。
在圖1光伏并網逆變器的雙閉環控制策略中,電壓外環控制使直流母線電壓udc保持穩定;電流內環控制輸出電流,調節輸出電網電流使之與電網電壓同頻同相,從而實現單位功率因數并網。LCL濾波器對諧波的衰減具有更好的抑制作用,最后經過L1、L2和C1組成的LCL濾波器濾波后并網。
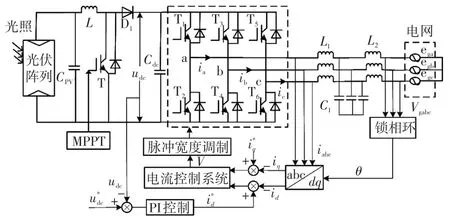
圖1 兩級式三相光伏并網逆變器拓撲結構及控制策略Fig.1 Topology of two-stage three-phase photovoltaic grid-connected inverter and its control strategy
光伏并網逆變器直流母線電容Cdc目前多采用容量較大的鋁電解電容,直流母線電容吸收由逆變器在高頻工作模式下產生的大量高次諧波電流,起到穩定直流母線側電壓和對逆變器升壓后進行儲能的作用,從而實現向電網輸送穩定、干凈電能的目的。
圖2為電容C和等效串聯電阻ESR(equivalent series resistance)所構成的直流母線電容Cdc的等效模型。光伏并網逆變器系統作為強非線性系統,元器件長時間處于高頻模式運行,使電容的ESR增大、電容值C減小,造成直流母線電容加速老化、性能急劇退化,最終導致電路出現參數性故障,造成裝置的損壞甚至系統的崩潰。
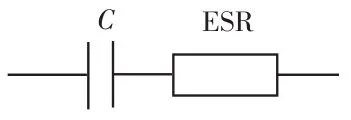
圖2 電解電容等效模型Fig.2 Equivalent model of electrolytic capacitor
通常以ESR增大為初始值的2~3倍或者電容值C減小到初始值的80%作為電解電容的失效判據[9]。光伏并網逆變器直流母線處電容的ESR值較小,且易受電路的工作情況影響,檢測精度不高,因此本文以電容值減小到初始值的80%作為光伏并網逆變器直流母線電容發生參數性故障的判據。
2 VMD-WPE故障特征提取方法
故障特征提取方法是實現光伏并網逆變器參數性故障診斷的核心環節。直流母線電容在不同老化程度下的光伏并網逆變器電路狀態區別甚微,因此對故障特征量的提取較為困難。VMD可有效避免在處理參數性故障信號時所產生的模態混疊,具有較好的復雜數據分析精度的優點。小波包變換用于故障特征提取綜合了時域和頻域分析兩種方法,是一種精細的信號分解方法,利用小波包變換提取WPE能夠表征信號的故障特征,其特征提取結果可信度高,抗干擾性強。以光伏并網逆變器三相橋臂中點間的線電壓Uab、Ubc、Uca為測量點,該測量點數據不受其他相故障的影響,減少了特征提取中冗余的干擾數據。故對光伏并網逆變器三相線電壓信號進行優化VMD后,提取各模態分量的WPE作為參數性故障特征量。
2.1 VMD分解信號
VMD通過迭代搜尋變分模型的最優解匹配各模態分量的最佳中心頻率和有效帶寬,進而實現給定信號的有效分離[10]。其方法的整體思想是構造和求解變分問題。
假設有一原始信號被分解為K個本征模態分量,為使分量為具有中心頻率的有限帶寬,同時滿足各模態分量的估計帶寬之和最小,約束條件為所有模態分量之和與原始信號相等,則相應的約束條件可表示為
式中:f(t)為當前時刻t的原始信號;j為虛數單位;δ(t)為單位沖擊函數;?t為 δ(t)的偏導;{uk}、{ωk}分別為分解后第k個模態分量和中心頻率;uk(t)為當前時刻得到的第k個模態分量。
為將式(1)轉變為非約束性變分問題,則需引入增廣Lagrange函數,其表達式為
式中:α為懲罰因子;λ為Lagrange因子。
通過采用乘子交替方向法結合Parseval/Plancherel、傅里葉等距變換來求解式(2),并尋求其表達式的“鞍點”,最終模態分量和中心頻率可表示為
VMD具有較好復雜數據分解精度的優點,但需要提前設置模態函數個數K、懲罰因子α和噪聲容忍度τ。模態個數K的確定對分解效果影響極大,K過小不易獲得足夠的故障信息;K過大會導致過分解且增大計算量,因此提出基于樣本熵SE(sample entropy)原理的K值確定法。
SE是優于近似熵的一種通過非負數來度量時間序列復雜度的方法。故障檢測信號經VMD后的序列,其自我相似性越高,則含有越多的故障特征信息,對應的SE值越小。選用光伏并網逆變器三相線電壓Uab、Ubc、Uca進行VMD,計算不同模態數下各模態分量的SE,并對SE求取均值,SE具體計算方法見文獻[11]。SE均值Sm可表示為
式中,gi為第i個模態分量的SE。
在不同K值下求得的最小SE均值所對應的K值即為VMD的最優模態數。
2.2 WPE提取
小波包變換[12]是比小波變換更加精細的一種信號分析方法,在每一級信號分解時,除了對低頻信號進行再分解,同時也對高頻信號進行再分解,實現信號分辨率的提高。經過小波包分解后,信號不同參數性故障程度所對應的頻段能量不同,因此經小波包分解后各節點的WPE可構成參數性故障特征向量,其表達式為
式中,Ep,k為各頻帶的WPE值,k=0,1,…,2p-1,p為小波包分解層數,。
2.3 VMD-WPE特征提取步驟
由第2.1和2.2節所述原理分析,可利用基于VMD-WPE特征提取方法對三相光伏并網逆變器的參數性故障進行特征提取,其具體步驟如下:
步驟1以最小SE為準則確定VMD模態分解數K;
步驟2對光伏并網逆變器三相線電壓信號Uab、Ubc、Uca進行VMD,獲得模態分量;
步驟3利用小波包變換求取各模態分量的WPE;
步驟4對所求的WPE構建參數性故障特征向量。
3 MPA-LSTM參數辨識方法
LSTM是循環神經網絡的改進網絡,能對長期依賴信息進行學習,非常適合處理與時間序列高度相關的數據,對復雜時間序列數據的辨識和預測有優良的效果,可用來解決光伏并網逆變器參數性故障診斷辨識精度不夠的問題[13-14]。然而LSTM的參數辨識效果受其隱含層節點、訓練次數等關鍵參數設置的影響。因此,采用MPA對LSTM關鍵參數進行尋優,建立MPA-LSTM神經網絡模型。
3.1 海洋捕食者算法
MPA是由Faramarzi等[15]在2020年提出的一種新型受自然啟發的優化算法,即在海洋系統中捕食者選擇最佳覓食的策略。MPA優化過程步驟如下。
步驟1初始化階段。MPA首先在設定的搜索空間范圍內隨機初始化獵物位置,其初始化表達式為
式中:Xmax、Xmin為設定的搜索空間上、下范圍;rand()為[0,1]內均勻隨機數。
步驟2MPA優化階段。在迭代初期,當捕食者移動速度比獵物速度快時,此時基于勘探階段的表達式為
式中:Ia、Ma分別為當前和最大迭代次數;si為移動步長;RB為呈正態分布的布朗游走隨機向量;Ei為由頂級捕食者構造的精英矩陣;Pi為與Ei具有相同維數的獵物矩陣;?為逐項乘法運算符;p等于0.5;R為[0,1]內均勻隨機向量;n為種群的數量。
步驟3迭代中期,捕食者與獵物以相同速度移動,獵物基于Lévy游走策略進行開發;捕食者基于布朗游走策略負責勘探。開發和勘探的表達式為
式中:RL為呈Lévy分布的隨機向量;CF為步長的自適應參數。
步驟4在迭代終期,捕食者使用Lévy游走策略,其移動速度慢于獵物速度,此階段表達式為
步驟5解決渦流形成和魚類聚集裝置效應。MPA優化過程考慮了魚類聚集裝置和渦流效應對捕食者覓食行為的影響,以逃離局部極值問題。其表達式為
式中:FADs為魚類聚集裝置效應系數,取0.2;U為二進制向量;r為0~1的隨機數;Pr1、Pr2分別為獵物矩陣隨機索引r1、r2所對應的個體矩陣。
3.2 LSTM神經網絡
LSTM由Hochreiter等[16]在1997年提出,其結構如圖3所示,它包含3個門控單元,即遺忘門、輸入門和輸出門[17],LSTM具體的工作原理如下。
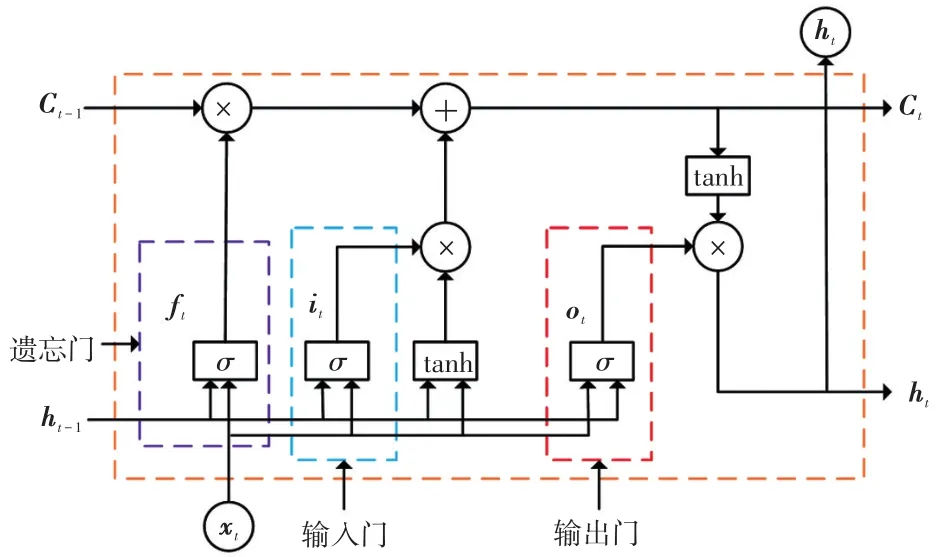
圖3 LSTM結構Fig.3 LSTM structure
1)遺忘
遺忘門接收前一單元的輸出ht-1和當前單元的輸入xt,當前時刻遺忘門輸出值ft可表示為
式中:σ為sigmoid激活函數;Wxf、Whf分別為輸入項xt、ht-1的遺忘門權重矩陣;bf為偏置項。
2)存儲
輸入門用于產生新的記憶,并將新記憶進行存儲添加到歷史記憶中。存儲的信息由輸入門輸出it和當前細胞狀態c?t決定,其計算式可表示為
式中:Wxi、Whi分別為xt、ht-1的輸入權重矩陣;bi為輸入偏置項;Wxc、Whc分別為xt、ht-1狀態的權重矩陣;bc為狀態偏置項。
3)更新
設定ct為當前單元狀態在t時刻循環單元選擇記憶的信息,其可表示為更新時遺忘t-1時刻的單元狀態ct-1加上當前時刻的輸入信息,即
4)輸出
根據當前細胞狀態計算需要輸出的信息ht,其計算公式可表示為
式中:Wxo、Who分別為xt、ht-1的輸出權重矩陣;bo為輸出偏置項;ot為輸出門的輸出;ht為經過激活函數tanh運算后當前時刻的輸出。
3.3 MPA-LSTM模型建立及實現步驟
MPA-LSTM模型的建立及具體實現步驟如下。
步驟1初始化。設置MPA算法最大迭代次數、種群數量n、魚類聚集裝置效應系數、常量P,令當前迭代次數為0,初始化獵物位置。
步驟2選擇尋優對象和確定適應度函數。將LSTM里的批量大小Batchsize、2個隱含層的節點數、訓練次數和學習率作為尋優對象,選用訓練樣本的均方誤差作為適應度函數,即
式中:B為批量大小;L1、L2為2個隱含層的節點數;Tt為當前時刻訓練次數;IL為學習率;Nt為當前時刻訓練樣本數;Y?i為第i個訓練樣本的實際值;Yi為第i個訓練樣本的預測值。
步驟3迭代更新。根據MPA不同迭代階段更新捕食者位置。
步驟4判斷終止條件。判斷當前迭代次數是否已達最大迭代次數,若是,則輸出最佳精英矩陣。
步驟5輸出最佳精英矩陣,即LSTM尋優的最佳網絡超參數,將尋優得到的超參數帶入LSTM模型中,構成MPA-LSTM模型。
4 故障診斷流程
本文提出VMD-WPE和MPA-LSTM的故障診斷方法用于三相光伏并網逆變器的參數性故障診斷,對其直流母線電容進行參數辨識,其故障診斷流程如圖4所示。參數性故障診斷分為離線訓練和在線辨識,具體步驟如下。
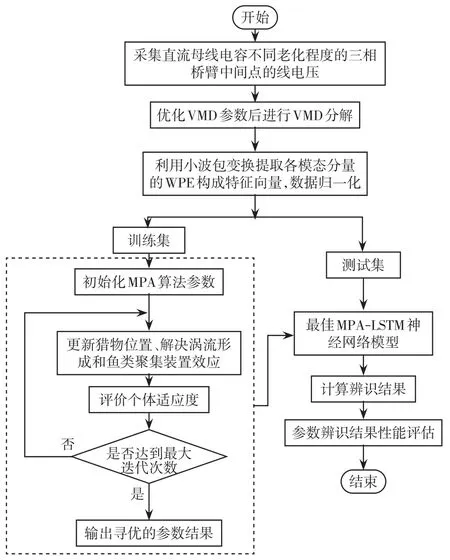
圖4 參數性故障診斷流程Fig.4 Flow chart of parametric fault diagnosis
(1)離線訓練。
步驟1數據采集。在光伏并網逆變器三相線電壓處,采集多組直流母線電容在不同老化程度下所對應的線電壓數據,經基于VMD-WPE進行故障特征提取并構建特征向量,對故障特征向量進行預處理作為訓練樣本集。
步驟2根據要求構建MPA-LSTM模型。以最小化LSTM網絡的誤差為適應度函數,采用MPA優化LSTM網絡超參數,保存優化后LSTM網絡的所有參數,建立MPA-LSTM模型。
(2)在線辨識。
步驟1數據采集。在逆變器三相橋臂線電壓處,采集當前時刻的線電壓數據,經基于VMD-WPE進行特征提取后構造特征向量,對其進行預處理作為測試樣本集。
步驟2MPA-LSTM測試。將測試樣本集輸入到訓練好的離線MPA-LSTM模型中,MPA-LSTM的輸出便是直流母線電容參數的辨識值。
步驟3診斷結果分析。根據辨識出的電容值結果結合電容失效判據,對參數辨識性能進行評估是否發生參數性故障。
5 方法驗證
5.1 仿真實驗分析
在Matlab/Simulink中搭建如圖1所示的三相光伏并網逆變器仿真模型。前級DC/DC升壓變換電路采用擾動觀測法來實現MPPT控制;后級逆變部分采用電壓外環、電流內環的雙閉環控制策略。仿真模型中包含的仿真參數如表1所示。
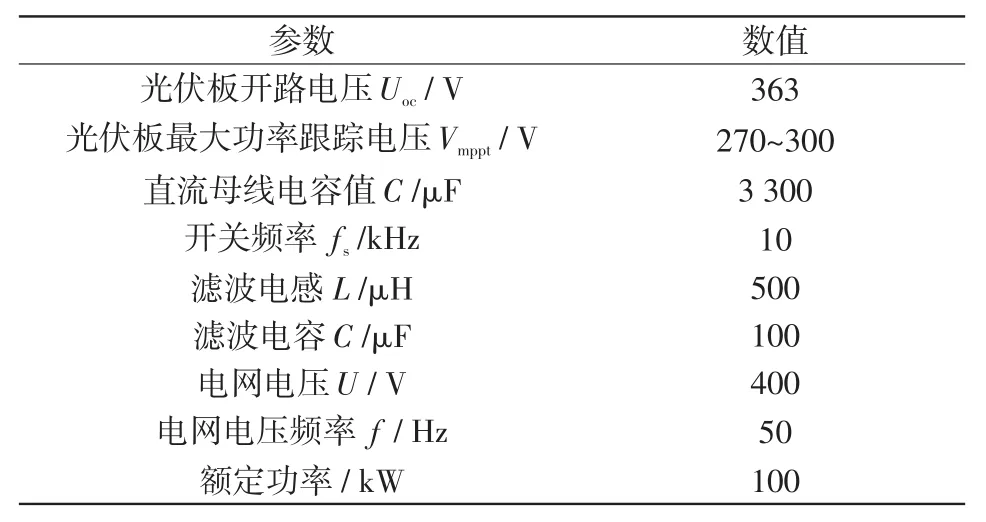
表1 仿真模型參數Tab.1 Parameters of simulation model
直流母線電容標稱值為3 300 μF,電容值在10%以內變化屬于元件參數在工作狀態下的正常波動,設定電容值在0-50%范圍之間變化,以模擬不同程度下電容性能退化發生參數性故障的情況;通過仿真采集光伏并網逆變器三相線電壓信號Uab、Ubc、Uca,其中,線電壓信號采樣頻率為100 kHz,采樣時間為0.1 s。將采集的三相線電壓數據按Uab、Ubc、Uca的順序依次排列作為一組樣本數據,通過仿真共采集500組樣本數據。
以三相線電壓Uab為例,直流母線電容為正常值時線電壓波形如圖5(a)所示;圖5(b)、(c)為直流母線電容處于不同老化階段時的線電壓波形。由圖5可以看出,直流母線電容不同老化程度下的線電壓波形很相似,因此從電壓波形中準確提取表征直流母線電容發生參數性故障的特征量至關重要。
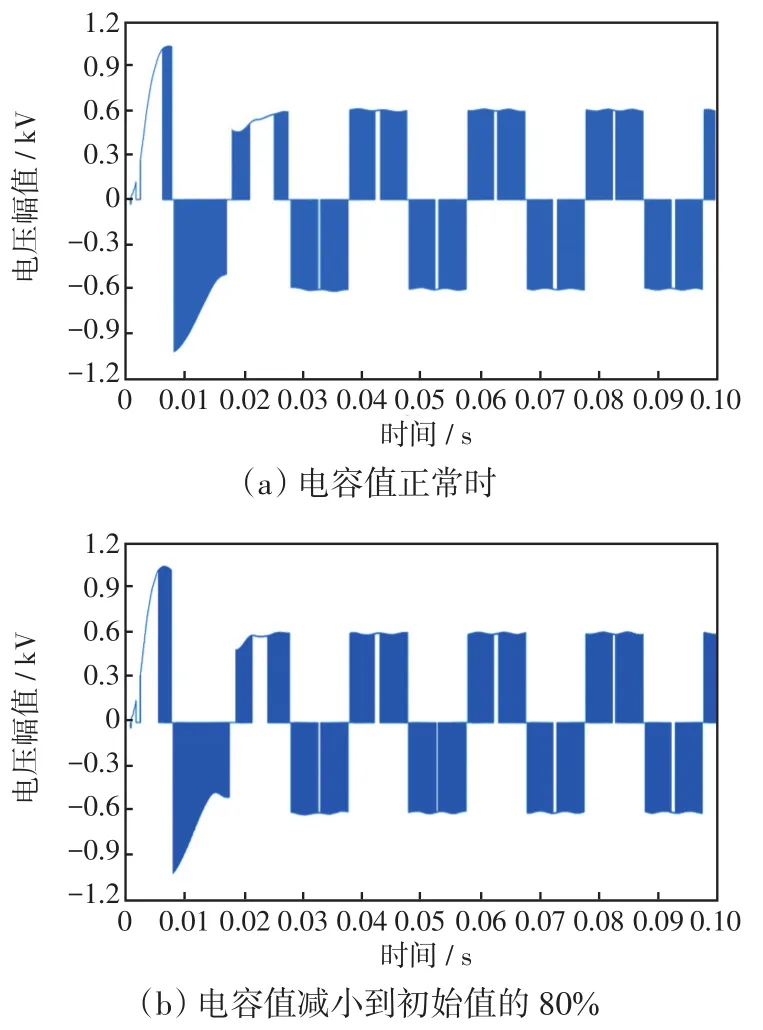
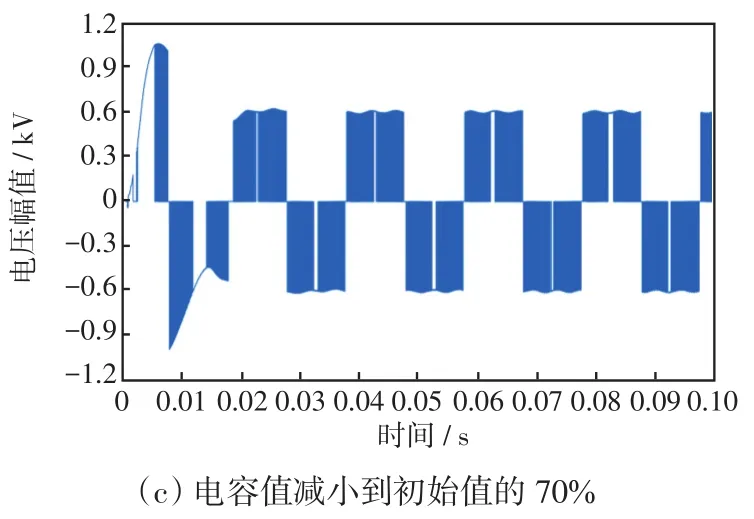
圖5 Cdc不同狀態時線電壓Uab輸出電壓波形Fig.5 Output voltage waveforms of line voltageUabin different states ofCdc
本文提取三相線電壓的VMD-WPE作為參數性故障特征向量,以樣本熵為準則確定模態數K,選取最小SE均值對應的K值作為最優模態數。不同K值的SE均值如表2所示,由表2可知,當K=5時所對應的SE均值最小,因此最優模態數K值確定為5。懲罰因子α采用初始默認值2 000;圖6為線電壓Uab經VMD分解后的IMF分量。

表2 不同K值的SE均值Tab.2 Mean sample entropy for different values of K
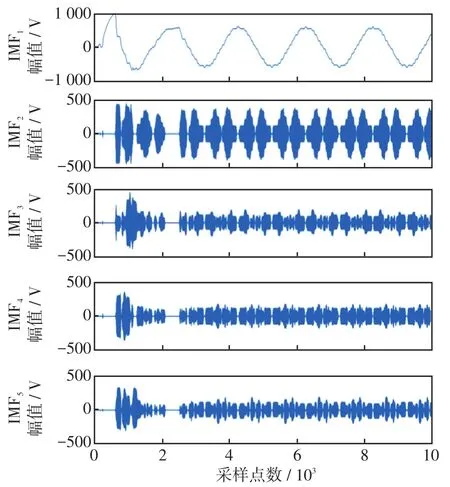
圖6 線電壓Uab的IMF分量Fig.6 IMF component of line voltageUab
本文采用MPA優化LSTM網絡中的關鍵參數,建立MPA-LSTM模型。優化對象為LSTM網絡的批量大小Batchsize、2個隱含層的節點數L1和L2、訓練次數T、學習率IL。設置MPA算法最大迭代數Ma=50、種群數量n=20、效應系數FADS=20、常量P=0.5。批量大小Batchsize、2個隱含層的節點數L1和L2、訓練次數T、學習率IL取值范圍分別為[1,64]、[1,100]、[1,100]、[1,50]、[0.001,0.01]。以LSTM訓練樣本的均方誤差作為適應度函數,使用MPA優化算法尋找一組最優網絡參數使樣本均方誤差最小。由于是最小化樣本誤差,因此適應度曲線是一條下降并逐漸趨于平緩的曲線,如圖7所示。
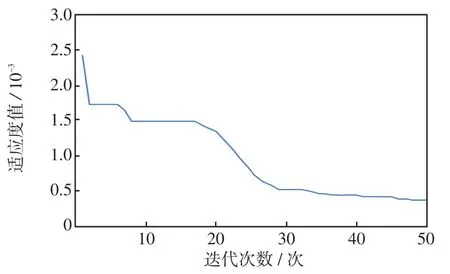
圖7 適應度曲線Fig.7 Fitness curve
5.2 診斷結果及對比分析
為驗證本文所提的VMD-WPE和MPA-LSTM參數性故障診斷方法的綜合性能,以光伏并網逆變器原始三相線電壓信號Uab、Ubc、Uca為故障檢測量,設置5種不同的特征提取和參數辨識方法,將特征向量集中的400組樣本作為訓練集,100組樣本作為測試集。基于相同樣本數量的訓練集和測試集采用不同故障診斷方法對診斷效果進行對比分析,具體方法如下。
方法1WPE+BPNN。采用傳統的故障診斷方法;利用小波包基函數為db3的3層小波包分解;反向傳播神經網絡BPNN(back propagation neural network)網絡輸入神經元數為12、輸出神經元數為1、隱含層神經元數通過尋優后設為10,隱含層和輸出層傳遞函數分別選擇S型函數和purelin函數。
方法2VMD-WPE+BPNN。VMD以最小SE為準則確定模態數K為5,懲罰因子α采用初始值2 000,小波包分解參數選取同方法1;BPNN輸入神經元數為120、輸出神經元數為1、隱含層神經元數通過尋優后設為20,隱含層和輸出層傳遞函數選擇同方法1。
方法3VMD-WPE+LSTM。特征提取方法參數設置同方法2;設置LSTM網絡輸入為120、輸出為1、學習率 IL為0.01、batchsize為10、訓練次數 T為25、2個隱含層的節點數L1和L2均為20。
方法4VMD小波能量+MPA-LSTM。VMD參數設置同方法2;采用小波基函數為db3的3層小波分解;MPA-LSTM參數設置同本文實驗分析部分。
方法5VMD-WPE+MPA-LSTM(本文方法)。
各方法部分測試樣本的光伏并網逆變器參數性故障辨識結果如圖8所示。
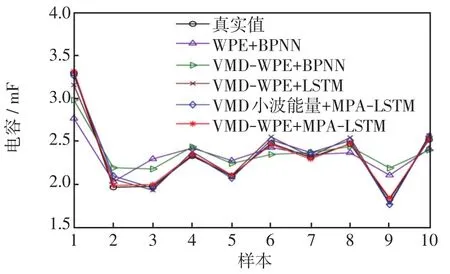
圖8 不同方法下的部分測試樣本參數辨識結果Fig.8 Parameter identification results of some test samples under different methods
將以上5種方法各運行20次,記錄決定系數R2和平均絕對誤差MAPE,并對其求取平均值,則整體辨識評價結果如表3所示。
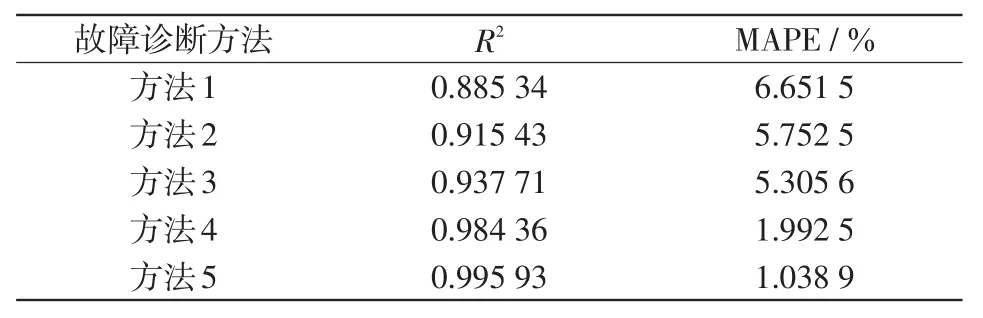
表3 電容值辨識的評價結果Tab.3 Evaluation results of capacitance identification
由表3可知,方法1、2和方法4、5分別采用相同的參數辨識方法、不同的特征提取方法,評價結果表明VMD-WPE的特征提取方法優于WPE、VMD小波能量的特征提取方法;方法3和方法5采用相同的特征提取方法、不同的參數辨識方法,評價結果表明MPA-LSTM的參數辨識方法效果最佳。本文提出的方法R2決定系數最大,平均絕對誤差MAPE最小,對直流母線電容的參數辨識效果最佳。以上分析驗證了本文所提方法在光伏并網逆變器中對直流母線電容進行參數性故障診斷的有效性。
6 結論
針對光伏并網逆變器參數性故障的特征區分度小,不易診斷等問題,本文提出一種VMD-WPE+MPA-LSTM的參數性故障診斷方法,并通過仿真對其可行性和精確性進行了驗證,主要結論如下:
(1)使用基于VMD的小波包分解對故障信號進行特征提取,能夠有效避免模態混疊,同時在時頻域獲取了更細致的參數性故障特征信息;
(2)利用MPA算法對LSTM網絡的關鍵參數進行優化,避免人為經驗對參數選取的不當,較大地提高了參數辨識精確度,參數性故障辨識效果均高于使用BPNN模型和單獨使用LSTM網絡模型。
猜你喜歡
電子制作(2019年15期)2019-08-27 01:12:00
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
上海電機學院學報(2015年4期)2015-02-28 14:30:00
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
計算物理(2014年2期)2014-03-11 17:01:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48