運載火箭姿態控制多速率陀螺融合方法
2023-03-15 02:05:18于海森王長亮譚述君劉玉璽胡迪科
上海航天 2023年1期
于海森,王長亮,譚述君,劉玉璽,胡迪科
(1.大連理工大學 工業裝備結構分析國家重點實驗室,遼寧 大連 116023;2.上海航天技術研究院,上海 201109;3.上海宇航系統工程研究所,上海 201109)
0 引言
大型液體運載火箭的箭體結構是彈性體,隨著運載能力和尺寸的增加,越來越呈現出低頻密集的特征,加劇了與低頻固有振動源(如Pogo 振動、受高空風載所致的箭體振動等)的耦合。這些低頻振動信號通過速率陀螺等測量系統進入控制回路,很容易與控制系統相互作用,影響控制系統的穩定性,甚至導致火箭飛行失敗。因此,如何有效降低控制回路中彈性信號(尤其是低頻部分)的影響是姿態控制系統設計的重要課題。目前,通常采用校正網絡或濾波器設計來削弱彈性信號影響,但隨著彈性頻率降低,這種方式的局限性越來越明顯。如何有效地融合多個速率陀螺的姿態測量數據,從源頭上減弱進入控制回路的彈性信號,是值得關注的解決方式。
數據融合技術已被廣泛應用于很多領域,如鄧晨等[1]采用基于梯度信息和高斯過程回歸的數據融合方法對飛行器飛行試驗辨識數據和風洞試驗數據進行融合,其建模結果表明,融合模型預測數據的精度均高于一種數據模型精度。宋欣瑞等[2]提出基于多傳感器決策級數據融合的多任務深度學習模型,結果表明,該模型比3 個基線模型的識別準確率平均高出8%;胡勝波等[3]提出火箭飛行數據分布式多尺度融合的研究;司長哲等[4]提出基于Kalman 濾波的數據處理多尺度融合算法;王禹等[5]采用基于Kalman 濾波的多傳感數據融合技術使火箭橇信息測量系統獲得更好的性能。但目前關于運載火箭多速率陀螺融合技術研究的資料較少。美國國家航空航天局(NASA)在報告中提出了運載火箭的速率陀螺配置方案,根據傳感器可安放的位置,依據頻率響應數據來優化混雜的傳感器的權重系數[6]。該方案被設計用在SLS 發射系統上,證明該方案對火箭的彈性問題有很好作用。NASA 空間飛行中心開發的運載器上升段穩定性分析工具箱ASAT[7]中,角速率的測量用了多個傳感器值組合的方法。文獻[8]認為運載火箭傳感器的布局對控制系統的穩定裕度影響很大,傳感器的性能可以通過多個傳感器數據組合來改善。文獻[9]在火箭控制系統采用速率陀螺冗余方案,一級飛行段采用一級速率陀螺和二級速率陀螺同時進行控制。文獻[10]采用多個速率陀螺組合代替單個速率陀螺,提出任意數量速率陀螺組合的斜率計算方法,降低了對全箭模態試驗振型斜率選位和斜率測量精度的要求。速率陀螺優化配置和數據融合通往導致復雜的優化問題求解,因此,由于遺傳算法及其改進算法全局優化搜索的優勢[11],在實際工程中被廣泛應用。RAO 等[12]采用遺傳算法研究了平面桁架結構中傳感器優化,得到了最優配置;YAO 等[13]將遺傳算法應用于航天器傳感器優化中,在遺傳算子中采用了一種強制變異方法,提升了收斂值,得出了接近最優的方案。李文博等[14]應用基于均勻設計的遺傳算法對星載天線上的傳感器進行了優化;耿飛等[15]針對衛星太陽能帆板傳感器的優化問題,對傳統遺傳算法的局限性和不足做出改進,提出了自適應改進遺傳算法。覃柏英等[16]探討了單目標和多目標優化的傳感器優化配置問題,通過與現有的模態動能法、有效獨立法及基于QR 分解的逐步累積法進行比較,傳感器優化配置的結果表明,提出的整數編碼遺傳算法優于上述 3 種方法。實驗結果表明,改進的遺傳算法對于傳感器的配置優化比較有效。
為降低運載火箭姿控回路中彈性信號的影響,基于多個速率陀螺測量的姿態信號,結合姿控回路的傳遞函數,將多速率陀螺融合問題轉化為一個優化問題,通過采用遺傳算法進行求解,從而降低彈性對姿態控制的影響,提高控制系統的穩定性。
1 彈性信號對姿控回路的影響
對于大型運載火箭的姿態控制設計而言,箭體的彈性振動不可忽略。彈性振動信號會通過姿態測量裝置進入控制回路,從而影響控制系統的穩定性,并且姿態控制系統設計周期長,設計工作復雜困難[17]。
以俯仰通道單通道為例,考慮箭體彈性振動[18],其俯仰通道的姿態運動學方程為
式中:Δθ、Δα和αw分別為彈道傾角、攻角和風攻角;δφ為俯仰通道的等效擺角;qi為第i階彈性振動的廣義坐標;為橫向干擾力bz1為俯仰通道結構干擾力矩;為運動方程系數,具體意義詳見文獻[19];Δφ為俯仰角;ξi為第i階彈性振動阻尼系數;ωi為第i階彈性振動的固有頻率;Qiy為第i階彈性振動的廣義干擾力系數。
考慮到姿態測量裝置(如慣組、速率陀螺等)安裝在箭體上,因此除測量出剛體姿態運動信息外,還能敏感到彈性振動產生的附加姿態信息,故姿態測量裝置所測量的信息為
式中:Δφg為姿態角測量裝置測量信息;(Xg)為測量裝置安裝處的第i階彈性振型斜率。
經典的火箭控制設計是采用PD 控制律,將測量的箭體姿態通過運算產生發動機擺角指令形成閉環反饋控制,其控制方程為
從上述控制律可以看出,其姿態信息由慣組、速率陀螺等傳感器測出,包含了彈性振動的信息,會直接影響到發動機擺角指令,影響姿控系統的穩定性。目前在姿態控制系統設計時,主要通過校正網絡的設計實現對彈性信號的抑制,保證系統在各特征秒點和各狀態下,剛體、彈性和晃動均有足夠的幅值和相角裕度。此外,在做火箭姿態控制時也需要考慮箭體參數和系統參數偏差,考慮偏差最壞組合,構成額定、上偏差、下偏差和彈性上偏差等狀態。
降低控制回路中彈性信號影響的另一個思路是利用多個速率陀螺進行測量從源頭上降低進入控制回路的彈性信號,不僅會降低火箭控制器設計的難度,還可以增加火箭控制系統的穩定性。事實上,在工程上已有利用速率陀螺的安裝位置和兩個速率陀螺數據融合等方式抑制彈性信號。例如,采用兩套速率陀螺測量裝置,分別放在第i次振型波腹的前、后,將這兩套速率陀螺測量的信號相加,使第i次振型彈性振動信號抵消,也避免了箭體彈性信息進入系統。而本文則面向兩個以上的多速率陀螺測量姿態信息,在經驗基礎上開展多速率陀螺融合方法研究降低進入控制回路的彈性信息。
2 多速率陀螺融合方法
多速率陀螺融合方法,通過優化多處速率陀螺測量值的權重分配來減少彈性信號對姿態控制的影響。為了降低信號中的彈性信號,定義一個向量λ為速率陀螺的權重分配系數,里面的每一個元素λi代表的是第i個速率陀螺的權重系數,設N為速率陀螺個數,如果λi取0,則表示第i個位置速率陀螺的測量值沒有采用,在實際中可以在該位置少配置一個速率陀螺。
建立如下的目標函數:
式中:Hatt(jω)為姿態角的傳遞函數;Hrat,i(jω)為姿態角角速度的傳遞函數;a0和a1為控制律系數。
該優化問題的定義是使選定頻率范圍內擺角指令傳遞函數中的彈性信號峰值最小,例如彈性信號對應的峰值往往出現在中高頻段,可以選擇頻率ω的范圍在0~103rad/s。多速率陀螺融合方法就是通過優化多個速率陀螺的權重分配系數從而使目標函數的值最小,即進入控制回路的彈性信號最弱。因此,需要選擇合適的優化算法求解最優的權重分配系數λ。
3 基于遺傳算法的求解方法
多速率陀螺融合方法的設計是一個多變量、有約束的非線性規劃問題。傳統優化算法如罰函數、復合變形法等對于關系復雜、設計變量較多的優化問題,一般收斂速度較慢,且要求目標函數連續可微等,最終結果可能只是局部最優解。隨著優化要面對的問題規模和復雜程度的逐漸增大,有學者提出新的優化算法,如遺傳算法、粒子群優化法等。由于遺傳算法的進化特性,搜索過程中不需要問題的內在性質,對于任意形式的目標函數和約束,無論是線性的還是非線性的,離散的還是連續的,都可處理,而粒子群優化法、神經網絡等優化算法主要應用于連續問題。
遺傳算法的使用規則類似于概率進化算法,其核心思想引自達爾文的自然進化理論,其主要特點是直接對結構對象進行操作,不存在求導和函數連續性的限定,具有內在的隱并行性和更好的全局尋優能力,采用概率化的尋優方法,能自動獲取和指導優化的搜索空間,自適應地調整搜索方向,不需要確定的規則。因此,可以基于遺傳算法進行優化求解。
將速率陀螺的權重分配系數向量λ作為染色體進行編碼、并隨機生成一定規模的初始種群;然后根據遺傳算子對種群中的個體進行選擇、交叉及變異等操作;最終通過迭代逐漸演化出適應度最高的個體,作為權重分配系數的最優解。具體過程如下:
步驟1初始化種群。將多速率陀螺權重分配系數向量λ作為染色體,其中,采用實數編碼方式進行編碼,并隨即生成M個滿足約束條件的個體作為初始種群P,進行后續遺傳操作。
步驟2適應度函數定義。優化目標是使多速率陀螺測得的姿態信號中彈性信號峰值最小,而遺傳算法是保留適應度值大的個體,因此可以將式(4)的中求彈性信號峰值的式子前加入負號作為適應度函數為
步驟3遺傳操作。首先對種群個體進行選擇,使適應度值較佳的個體保留到下一次迭代;其次對種群中個體進行交叉操作,以保證種群的穩定性,使迭代過程向著最優解方向進行;最后以一定概率進行變異操作,保證種群多樣性,避免計算結果陷入局部最優解。
步驟4終止條件判斷。對種群個體重復進行遺傳操作。若迭代次數達到預設最大值,或達到穩定迭代周期(即最佳個體在一定迭代周期內不發生變化),則結束進化,選擇最佳適應度個體作為最終計算結果。
4 算例與結果分析
本算例運載火箭的5 個速率陀螺分別安裝在芯級和4 個助推級上,傳統上僅采用安裝在芯級的速率陀螺信號,作為多速率陀螺融合前的情況,安裝在芯級處的速率陀螺作為第一個,即可以用λ=[1 0 0 0 0]來表示;下面算例主要比較采用本文方法對多速率陀螺融合后相對于速率陀螺融合前(即傳統上僅采用芯級速率陀螺信號)的效果。
首先通過遺傳算法對某個選定秒點的多速率陀螺進行融合,給出該秒點下三通道的多速率陀螺權重系數。分析多速率陀螺融合前后對火箭三通道開環傳遞函數bode 圖的影響,從而分析對控制回路中彈性信號的影響。接著分析在設計好的一套火箭控制器上加入多速率陀螺融合方法后對火箭控制器性能的影響。
4.1 多速率陀螺融合方法對控制回路彈性信號的影響
通過遺傳算法得到火箭三通道多速率陀螺融合的結果并對結果進行分析。可以選擇運載火箭任意特征秒點或者插值秒點的數據,由于火箭在特征秒點第59 s 處于大風區,因此不妨對第59 s 進行分析。速率陀螺的個數為5,即式(5)中N=5,種群規模設置為100,最大迭代次數設置為100,穩定迭代周期設置為50。針對俯仰通道通過遺傳算法得到種群的最佳適應度值和平均適應度值如圖1 所示。由圖1 可以看出,在迭代100 次后,最后種群的最佳適應度值0.631 5 與最后種群的平均適應度值0.632 3 十分接近,從曲線也能看出,最后適應度值呈收斂趨勢。
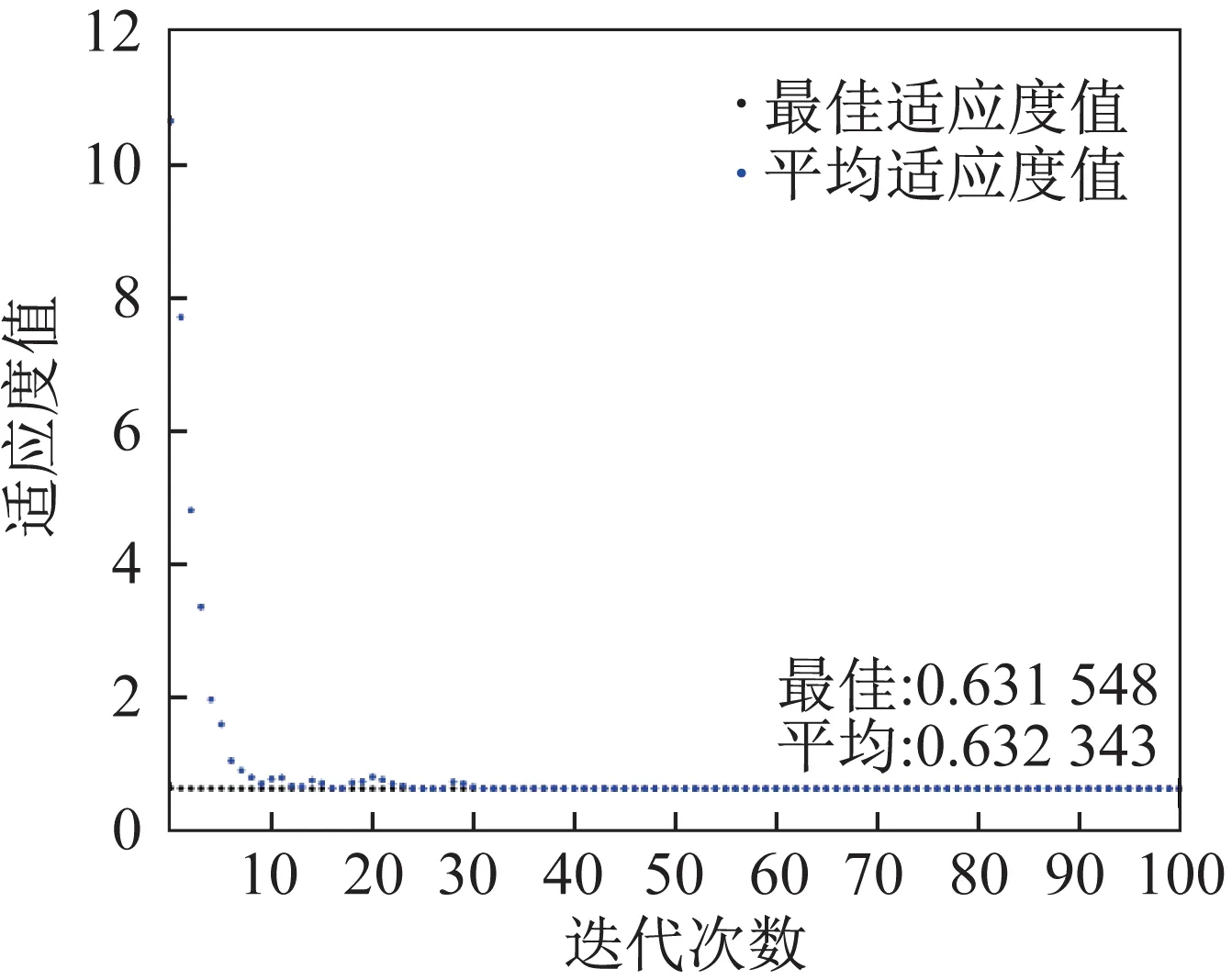
圖1 遺傳算法得到的最佳適應度值和平均適應度值曲線Fig.1 Beat fitness and mean fitness curves obtained by the genetic algorithm
第59 s 點俯仰通道、偏航通道和滾動通道的速率陀螺權重分配系數λ的最終結果和最佳適應度值fval的結果,見表1。
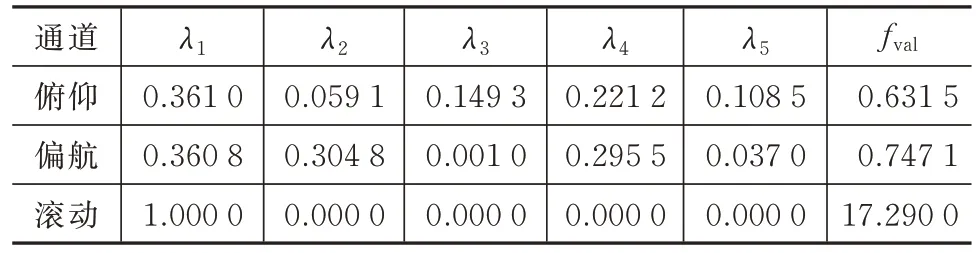
表1 俯仰通道優化結果Tab.1 Optimized results of the pitch channels
由表1 可以看出,滾動通道進行多速率陀螺融合的結果和融合前一樣,即只采用第一個速率陀螺已經是最好結果。
在該特征秒點的數據下進行俯仰通道開環傳遞函數bode 圖分析,多速率陀螺融合前后俯仰通道bode 圖的對比如圖2(a)所示,加入速率陀螺融合以后,彈性第一階峰值有所下降,融合前峰值為15.60 dB,融合后峰值0.63 dB,下降大約14.97 dB,可以得出加入速率陀螺融合技術后,有降低控制回路彈性信號的作用,并且,融合后峰值的數值0.630 0 與遺傳算法的最佳適應度值0.631 5 十分接近,說明采用式(5)作為遺傳算法的適應度函數可以準確地找到選定頻率范圍內的彈性最大信號,再通過遺傳算法得到適應度值最小(即彈性最大信號最低)的多速率陀螺權重系數,從而達到采用多速率陀螺融合方法降低彈性信號的作用。俯仰通道和滾動通道的開環傳遞函數bode 圖如圖2(b)、圖2(c)所示。從圖2(b)可以看出,加入多速率陀螺融合后彈性第一階峰值有所下降,融合前峰值為15.90 dB,融合后峰值為0.74 dB,峰值下降約為15.16 dB,彈性信號有所降低。圖2(c)滾動通道多速率陀螺融合前后的bode 圖重合,也說明了針對滾動通道只采用第一個速率陀螺已經是最優結果。
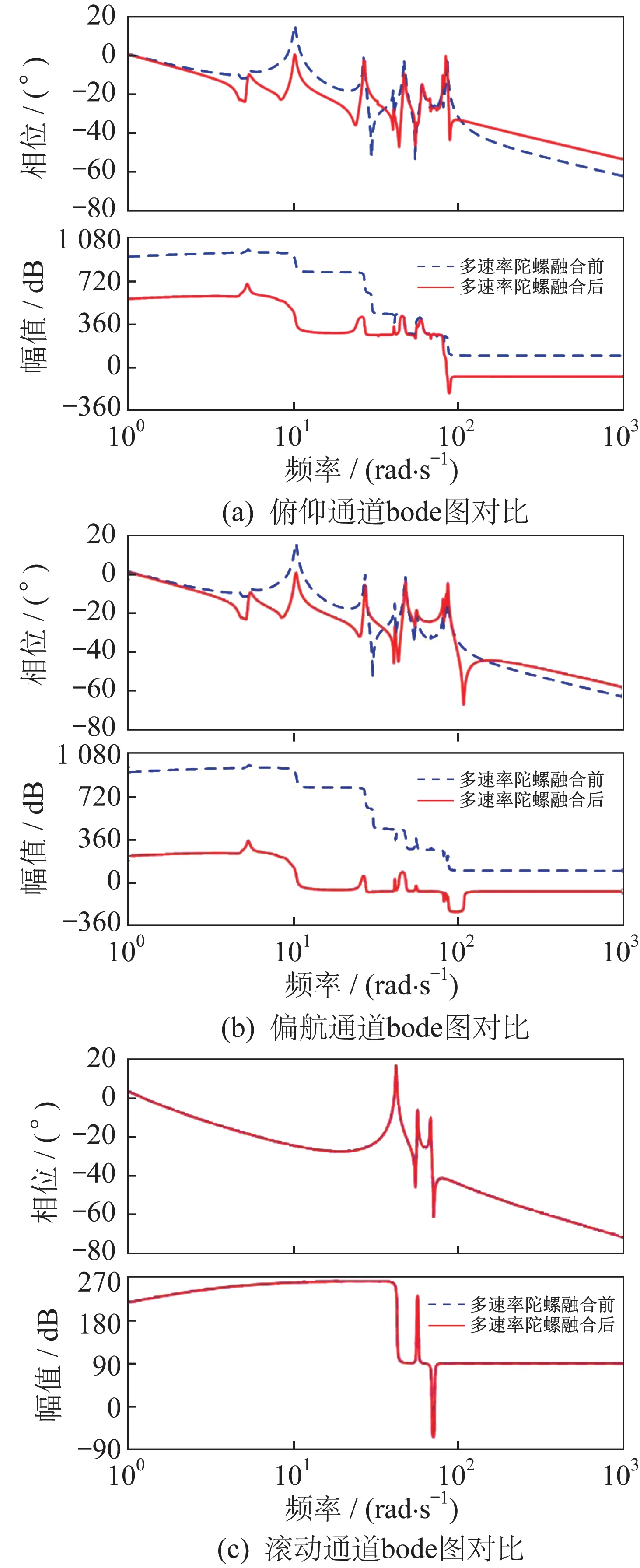
圖2 三通道多速率陀螺融合前后bode 圖對比Fig.2 Bode diagrams of the three-channel multi-rate gyro before and after fusion
因此,采用多速率陀螺融合方法可以有效地降低控制回路中的彈性信號。此外,對于大型運載火箭控制系統,控制系統與彈性模態的關聯性需重視,尤其是一階彈性頻率與剛體固有頻率比較接近,很可能剛彈產生激振,導致系統失穩[20]。而采用多速率陀螺融合方法后開環傳遞函數bode 圖彈性一階峰值降低,剛體的截止頻率幾乎沒有發生改變,因此可以十分有效地降低火箭控制器的設計難度,并提高了火箭控制系統的穩定性。
4.2 多速率陀螺融合方法對控制器性能的影響
研究速率陀螺融合方法在控制器設計中的應用效果。在多速率陀螺融合前,時域系統上設計了一組控制器參數,包括3 個通道的控制律系數以及3 個通道的校正網絡,仍然分析第59 s 點的控制器性能,采用表1 的三通道速率陀螺權重系數。
火箭的控制器性能體現在開環傳遞函數bode 圖的相角裕度、幅值裕度和彈性一階穩定情況,工程上一般要求在標稱數據下滿足相角裕度大于40°,幅值裕度大于6 dB,彈性一階峰值穩定。通常情況下彈性一階峰值采取相位穩定的方式,因為彈性一階的振型斜率測量比較準確,同時考慮到彈性一階峰頻率靠近截止頻率,采用幅值穩定的可能會使相交裕度達不到目標要求。
在設計和分析火箭單秒點控制器性能時,不僅需要考慮火箭在標稱數據下的情況,也需要考慮偏差情況,使得所設計的控制器在標稱數據情況下滿足上述要求,在偏差數據情況下保持穩定。本算例同時考慮了火箭標稱數據情況、上偏差情況、下偏差情況和彈性上偏差情況。多速率陀螺融合后對控制器性能的影響結果,見表2。
由表2 可以看出,采用多速率陀螺融合技術后,標稱和偏差情況下的相角裕度都略微有所下降,但是下降得不多,對控制器性能影響很小,并且可以通過微調控制律系數等方式提高相角裕度。幅值裕度相對多速率陀螺融合前提高了很多,尤其是在上偏差情況,融合前幅值裕度只有4.68 dB,融合后幅值裕度達到了7.32 dB,在有些火箭干擾比較大的秒點下,偏差情況的幅值裕度可能會更低,因此加入多速率陀螺融合技術可以大大提高控制器的穩定裕度。如果在設計控制器前就已經考慮多速率陀螺融合,會降低控制器的設計難度。

表2 多速率陀螺融合在第59 s 點處的控制器性能的影響Tab.2 Effects of multi-rate gyro fusion on the controller performance at the 59th second point
值得說明的是,采用多速率陀螺融合方法后,由于彈性峰值的降低,彈性一階峰由原先的相位穩定改變為幅值穩定。因此,從總體上考慮,加入多速率陀螺融合技術對控制器性能有所提高,在其他給定秒點或插值秒點具有相似的結果。
5 結束語
本文對運載火箭多速率陀螺融合方法進行研究,建立了多速率融合方法的目標函數,采用遺傳算法對多速率陀螺融合方法進行求解。分析多速率陀螺融合前后對火箭三通道開環傳遞函數bode圖的影響,結果表明,采用多速率陀螺融合技術可以有效降低信號中的彈性信號,提高了火箭的穩定性,并有利于火箭控制器的設計。通過在給定秒點設計好的火箭控制器上加入多速率陀螺融合方法,研究對火箭控制器性能的影響,結果表明加入多速率陀螺融合方法可以提高火箭控制器的性能,使火箭更適應偏差情況。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代出版(2020年3期)2020-06-20 07:10:34