基于支持向量機的抗干擾決策技術
2023-03-15 02:05:10原浩娟程龍寶冀文輝
上海航天 2023年1期
原浩娟,程龍寶,徐 恒,冀文輝
(上海航天電子通訊設備研究所,上海 201108)
0 引言
隨著當今電子技術的蓬勃發展,雷達探測區域內的電子裝備逐漸形成了種類繁多、體制復雜的特點,因此空間內常充斥著各種電磁信號。現代戰場的環境往往突發多變,這些戰場的干擾雜波等信號頻域密集交疊、空域縱橫交錯、時域突發多變、能量強弱多樣[1-2]。針對雷達信號處理領域中的抗干擾問題,國內外研究者在這方面展開了大量的研究。早期的研究方法主要有副瓣匿隱法、副瓣對消法、自適應副瓣相消法、多徑自適應相消法和自適應波束形成法。近年來,研究的主要方法有自適應-自適應數字波束形成技術[3-5]、單脈沖和極大似然算法[6-8]。
面對現代雷達電子戰復雜的電磁環境,雷達系統應具有更高的對環境感知的能力。2006 年,HAYKIN[9]提出了認知雷達的概念,認知雷達因具有環境感知力強、可自適應發射處理等優點,被認為是未來雷達系統的一種發展方向。從2009 年開始,美軍逐步將認知的概念引入電子戰裝備中,標志著認知電子戰概念的形成[10]。認知電子戰系統通過認知對抗環節,根據認知偵察環節識別出干擾類型,自主決策需要采取的抗干擾措施。本文將支持向量機[11](Support Vector Machine,SVM)引入抗干擾決策系統中,通過對輸入樣本的訓練來得出抗干擾措施預測器,以此提升雷達的抗干擾性能。
1 抗干擾決策系統的輸入
雷達在同一時刻偵收到的干擾一般有一種或多種,對于決策系統,輸入的參量為只有0 或1 的二進制向量,見表1。
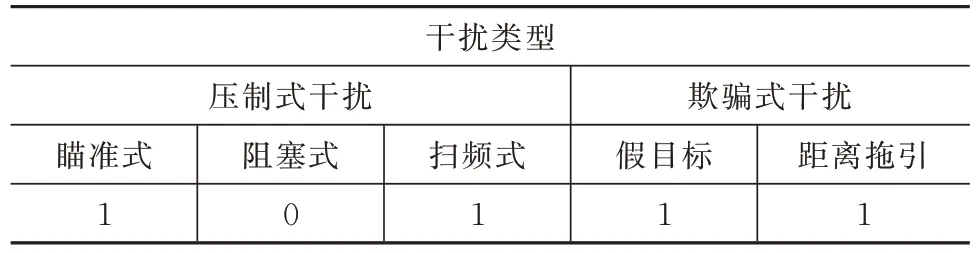
表1 同一時刻雷達偵收到的干擾樣式Tab.1 Jamming patterns detected by radar at the same time
由表1 可知,雷達偵收到的干擾有瞄準式噪聲干擾、掃頻式噪聲干擾、假目標干擾和距離拖引干擾,因此輸入的向量為[1,0,1,1,1]。決策系統對該輸入向量進行分析,在“一對多”原則下,選取一種抗干擾措施來對抗以上多種干擾樣式。該抗干擾決策系統也可以運用于“一對一”原則進行決策,當只有一種干擾存在的情況下,可以得到一種抗干擾措施。
在作戰前,需要先通過先驗知識構建抗干擾決策表,見表2,根據該表可訓練抗干擾決策系統。
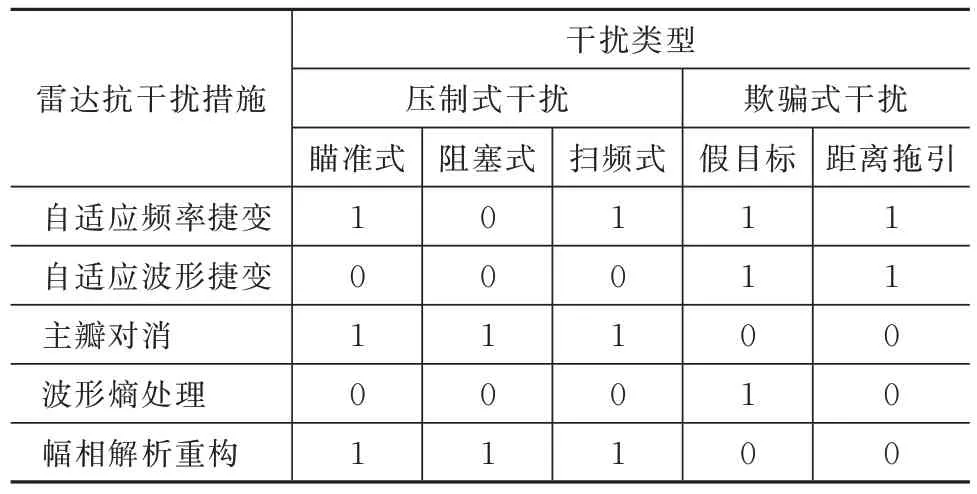
表2 抗干擾決策表Tab.2 Anti-jamming decision table
訓練好抗干擾決策系統后,當雷達偵收到干擾信號,首先通過干擾識別過程得到當前存在的干擾樣式,將存在的干擾樣式置“1”,不存在的干擾樣式置“0”,將0 或1 填入表2 中每種干擾對應的位置生成輸入向量,表1 所對應的輸入向量為[1,0,1,1,1]。輸入向量后,抗干擾決策系統通過,運算和分析輸出結果,即針對當前偵收到的干擾樣式所決策出的抗干擾措施,該抗干擾措施是當前最優的手段。
在僅有1 個干擾存在的情況下,通過采取該抗干擾措施,即可根據廣義電子抗干擾改善因子(ECCM Improvement Factor,EIF)來評估其在當前環境下的有效性。
2 基于SVM 的抗干擾決策系統
SVM 由AT&T Bell Labs 的VAPNIK 及其團隊于1995 年提出,一般用于解決分類問題,在少量訓練樣本的情況下還可獲得很好的結果。將樣本和樣本標記輸入SVM 不斷訓練,得到最優分類線,如圖1 所示。此時將新的樣本輸入SVM,通過最優分類線的判決即可得知新的樣本屬于紅點類還是藍點類,如圖2 所示。
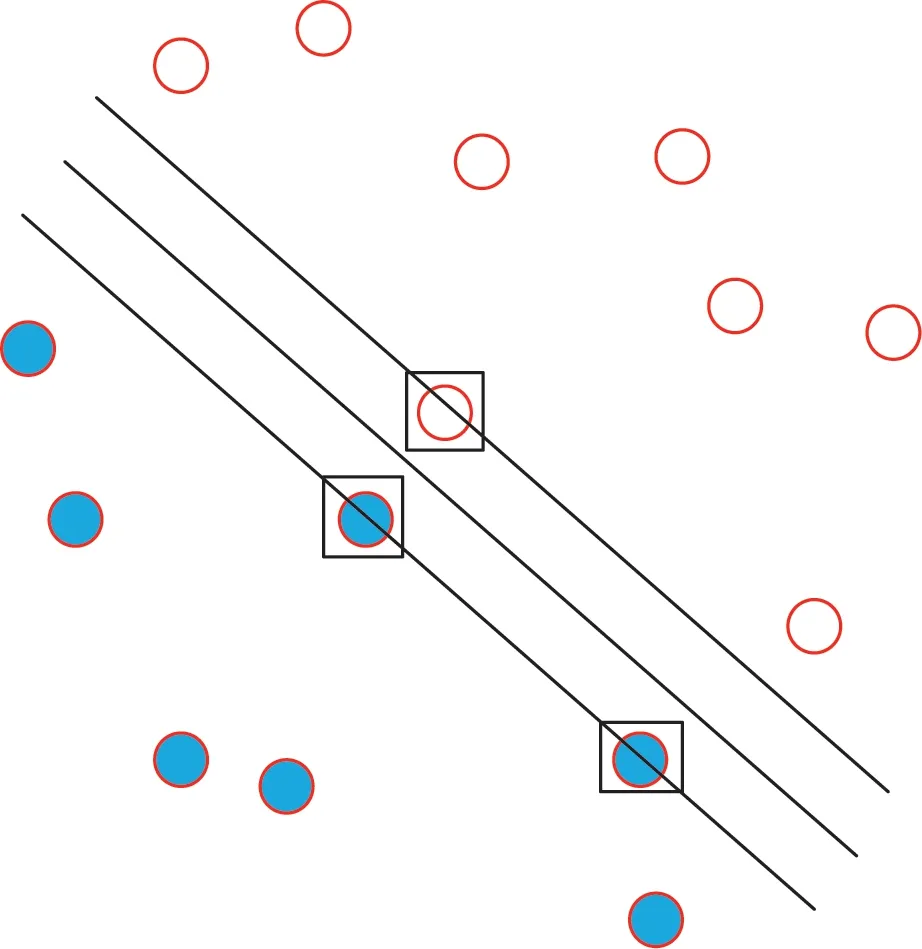
圖1 SVM 分類Fig.1 SVM classification

圖2 超平面歸一化的SVM 分類Fig.2 SVM classification based on hyperplane normalization
由圖1 可知,只有距最優分類線較近的幾個點起到決定最優分類線位置的作用,這幾個點稱為支持向量,支持向量位于數據集合的邊緣位置,在圖2中,被方框圈起來的點即為支持向量。
SVM 可解決二分類和多分類問題,多分類可以由多個二分類SVM 構成,二分類的輸出結果為2 個,將輸入向量經過多個SVM 判決后,再通過一定的機制裁決,即可得到多分類的輸出結果。在二分類SVM 中,假設樣本為{xi,yi}(i=1,2,…,n),xi為輸入向量,是樣本的特征,yj為輸出向量,對于二分類SVM,yj只有2 種結果,n為訓練樣本的總數。訓練SVM 的過程就是尋找1 個超平面,它可以按照其輸出向量的要求,將每個樣本集劃分為2 類,且離超平面最近的2 類間隔最大。
圖2 中的kTx+b=0 為歸一化后的超平面,平行于此超平面作經過支持向量的超平面,得到kTx+b=1 和kTx+b=-1 兩個超平面,分類間隔為,求解超平面的原則是將輸入向量劃分到要求的輸出結果里,且使離超平面最近的2 類的間隔最大,即
式中:k為超平面法向量;xi為輸入向量;yj為輸出向量;b為常量。
為了方便推導,將式(1)改寫為
引入Lagrange 乘子αi≥0(i=1,2,…,n),得到Lagrange 函數為
式中:αi為Lagrange 乘子。
由于式(3)較難求解,因此將其轉化為對偶形式,轉化為對偶問題需要滿足卡羅需-庫恩-塔克(Karush-Kuhn-Tucher,KKT)[12]條件,表達式如下:
式(4)滿足KKT 條件后,可將不等式約束轉化為等式約束,分別設拉格朗日函數L(k,b,α)對k和b的偏導數為0,表達式如下:
在本章以上的討論中,認為訓練樣本線性可分,如討論線性不可分的問題,則將超平面變為
式中:?(x)為輸入變量的映射函數。
令核函數
所以SVM 的最優判決函數為
式(12)為1 個二分類SVM 的判決函數,每1 個輸入向量x可得到1 個輸出向量。訓練SVM 分類器的目的即為了得到1 個判決函數,以便根據訓練好的判決函數去分類未知的輸入向量[13]。
3 抗干擾決策系統仿真
由表2 可知,抗干擾決策系統需要構造1 個五分類器。從SVM 的理論基礎可以看出,多分類器可以由多個二分類器構成。1 個二分類器的輸入樣本為{xi,yi},以表2 的前2 行為例,輸入向量為兩種抗干擾措施中對五種干擾樣式的遍歷。即對于第1 行采用自適應頻率捷變的抗干擾措施時,可以與之對抗的干擾方式為瞄準式干擾、阻塞式干擾和掃頻式干擾,假目標干擾以及距離拖引干擾,那么自適應頻率捷變可以對抗的干擾方式集合為這4 種干擾,取對抗集合的全部子集作為訓練樣本的輸入向量,再取自適應波形捷變可以對抗的干擾的全部子集為訓練樣本的輸入向量。輸出向量為自適應頻率捷和自適應波形捷變,值分別為1 和2。可以得到訓練樣本如圖3 所示,這些樣本作為1 個二分類SVM 的訓練樣本,可以將輸入向量劃分為1 或者2中的某一類。
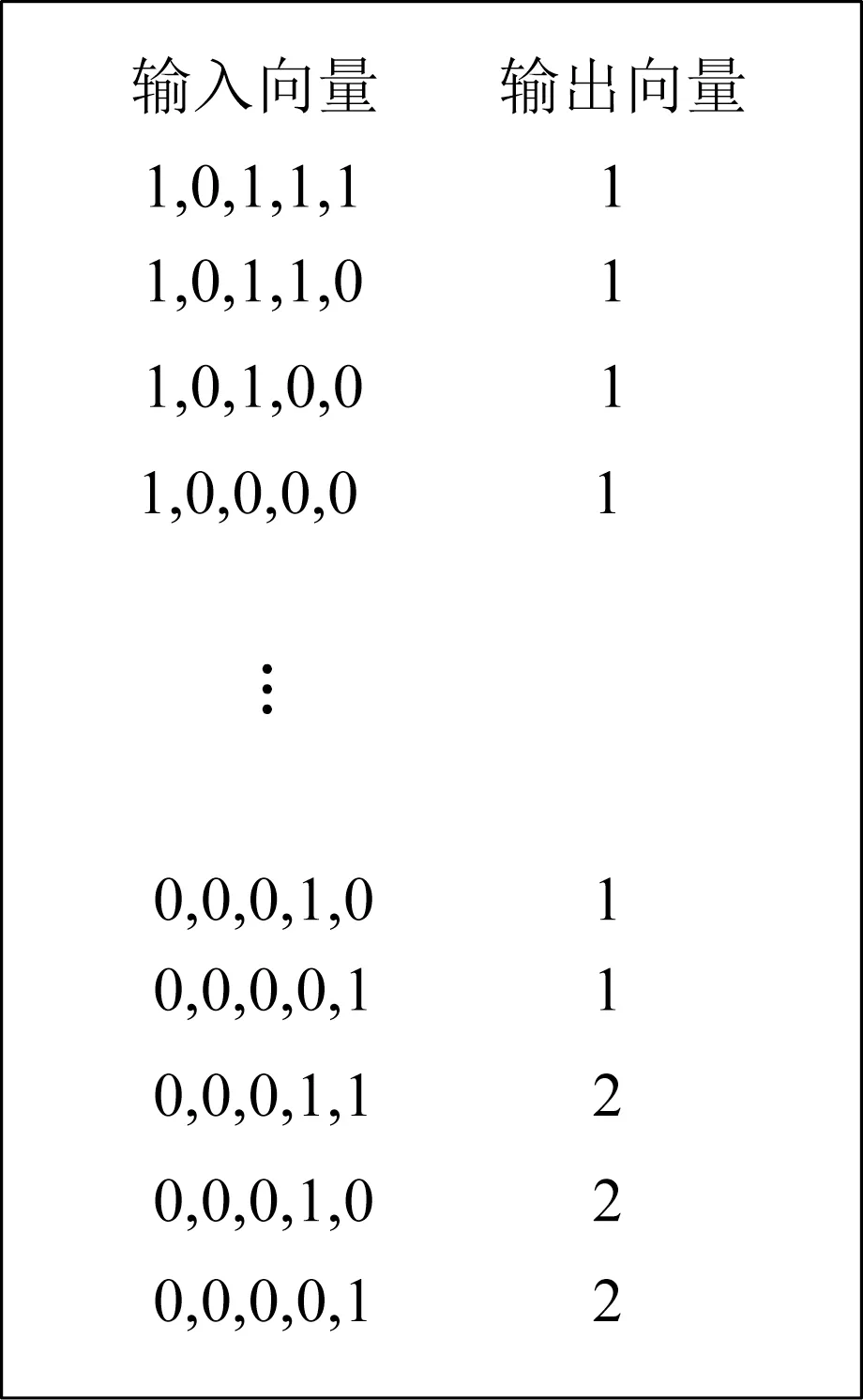
圖3 1 個二分類訓練樣本Fig.3 A binary training sample
對于表2 所示的問題,需要將五種抗干擾措施兩兩組合,也就是需要10 個二分類SVM。每種抗干擾措施有其訓練樣本的集合,通過這些樣本的訓練即可得到10 個二分類器。因此,要得到1 個輸入向量的最優決策結果,就需要將該輸入向量分別放入這10 個二分類器中。每個二分類器會得到1 個輸出向量,統計10 個二分類器得到的10 個輸出向量,將分類結果中出現次數最多的向量,作為這個輸入向量的最優決策結果,可得到多分類器的最優結果,該結果即抗干擾決策系統的輸出。根據決策結果,雷達可采取該抗干擾措施來對抗當前的干擾信號。
10 組二分類器的訓練樣本示意如圖4 所示,由這10 組訓練樣本訓練得到的10 個二分類器可以對任意1 個輸入向量進行五分類。分類的具體方式為:將輸入向量分別輸入10 個分類器中,得到10 個分類結果,統計這10 個二分類器的結果,將出現次數最多的結果作為最終結果,即需要采取的抗干擾措施。
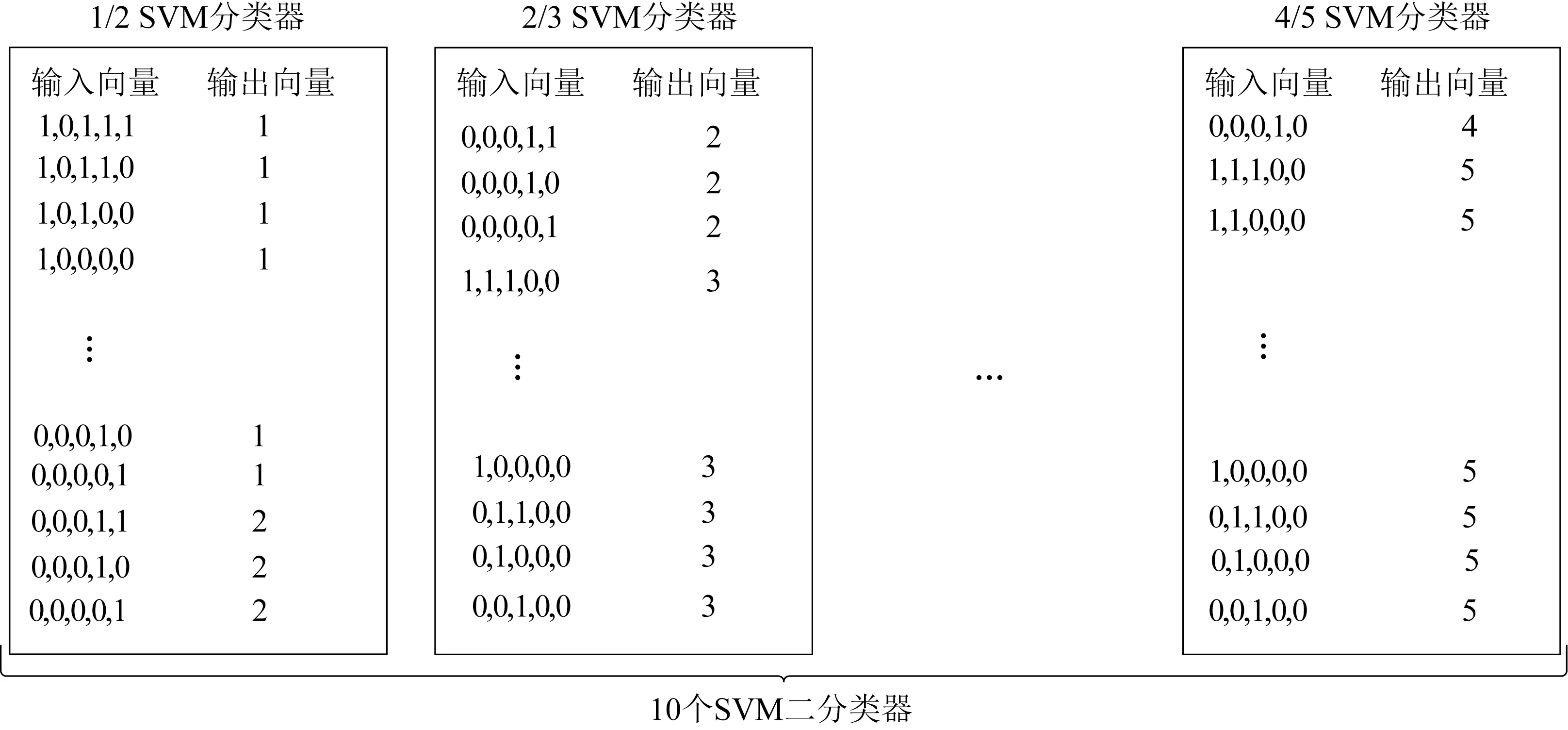
圖4 10 組二分類SVM 器訓練樣本Fig.4 10 groups of binary SVM training samples
依據以上原理設計抗干擾決策系統,如圖5 所示。該系統的操作步驟如下。
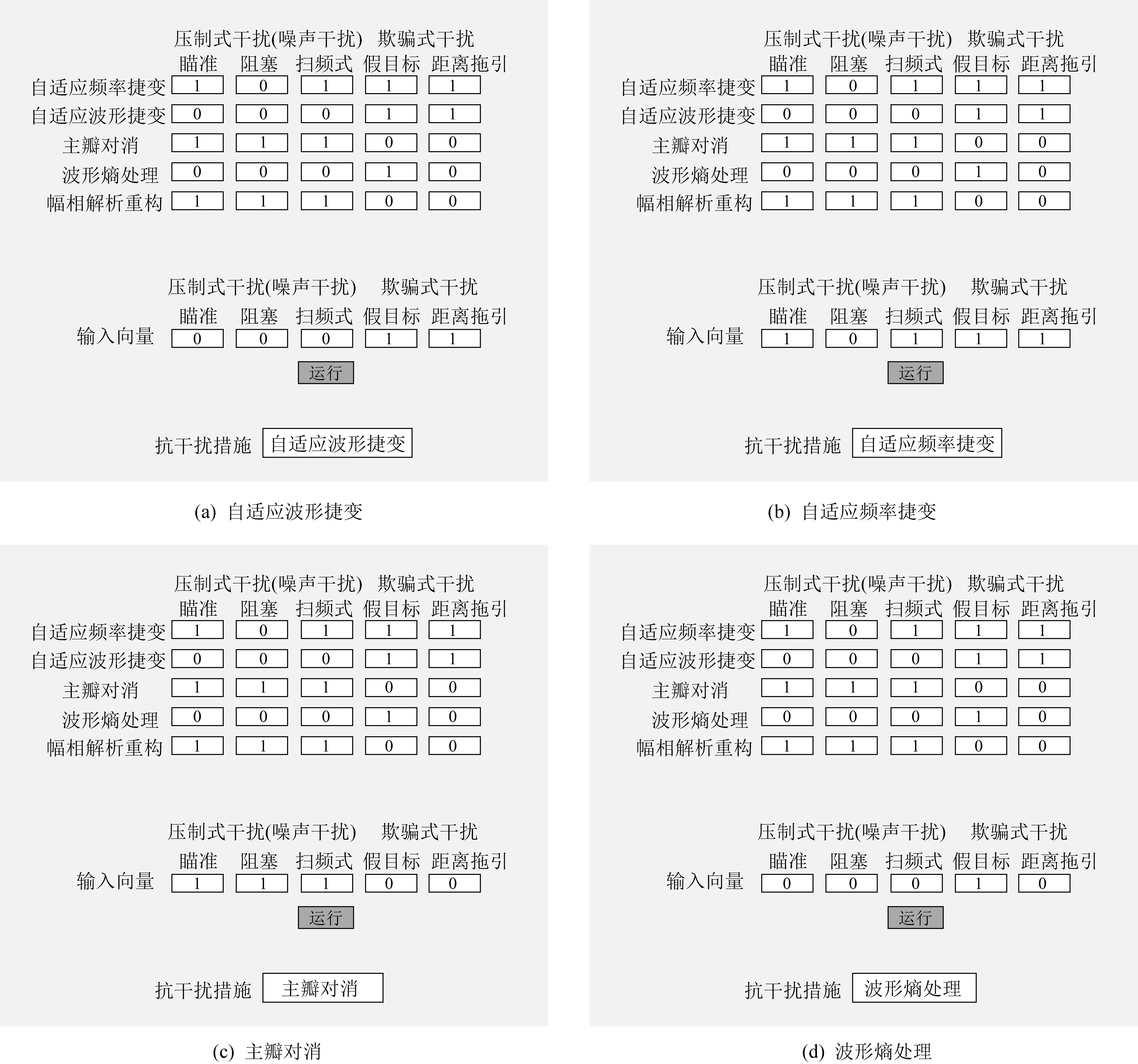
圖5 抗干擾決策系統仿真結果Fig.5 Simulation results of the anti-jamming decision system
1)根據當前環境中存在的干擾類型和雷達的抗干擾措施對抗效果,運用廣義EIF 法評估所有抗干擾手段的抗干擾效果,根據抗干擾效果評估的結果,構造廣義EIF 矩陣。
2)對壓制式干擾和欺騙式干擾,根據作戰的實時需求,分別設置2 個閾值,在廣義EIF 矩陣里,將超過閾值的位置置“1”,未超過閾值的位置置“0”。將以0 和1 劃分后的廣義EIF 矩陣填入抗干擾決策表。如在表中第i行第j列位置元素為1,即認為第j個抗干擾措施可對抗第i個干擾;如為0,則認為第j個抗干擾措施無法對抗第i個干擾。
3)在抗干擾決策系統中輸入第2 步得到抗干擾決策表。
4)根據當前環境偵收到的干擾類型,填寫輸入向量,1 代表當前環境有該類型的干擾,0 代表當前環境沒有該類型的干擾。
5)點擊運行按鈕,得到當前抗干擾系統決策出的最優抗干擾措施。
由圖5 的仿真結果可知,抗干擾決策系統可以很好地輸入向量進行決策。在實際作戰中,抗干擾系統可根據當前環境的干擾類型來決策用哪一種措施。在實際環境中,可運用當前環境偵收到的干擾類型和決策出的抗干擾措施,將評估結果經過處理,填入抗干擾決策系統中,訓練基于SVM 的抗干擾決策系統,實時更新抗干擾決策系統。通過不斷更新,更好地對當前干擾環境的抗干擾措施作出決策,達到智能化抗干擾系統需要的感知環境,同時實時更新抗干擾措施的目的[14-15]。
4 結束語
本文介紹了基于SVM 的抗干擾決策系統,通過樣本訓練SVM,形成自適應的抗干擾決策系統,根據當前電磁環境的干擾類型,自適應地決策出抗干擾措施,實現系統抗干擾策略的智能化。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年9期)2021-11-26 07:41:24
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:24
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
豬業科學(2018年4期)2018-05-19 02:04:38
初中生世界·七年級(2017年9期)2017-10-13 22:27:46