鋰離子電池快速壽命評價技術與方法
2023-03-15 02:05:14晏莉琴馬尚德呂桃林潘延林解晶瑩
上海航天 2023年1期
晏莉琴,馬尚德,羅 英,呂桃林,潘延林,解晶瑩
(1.上海空間電源研究所,上海 200245;2.空間電源技術國家重點實驗室,上海 200245)
0 引言
隨著鋰離子電池技術的發展以及應用領域的拓展,鋰離子電池的設計壽命和使用壽命越來越長,尤其是在電力儲能、航空航天等領域,其壽命需求達到10~15 a 甚至更長[1];即使在移動終端、電子消費品和電動汽車等領域,設計壽命也達5 a 以上。鋰離子電池的壽命是長期運行可靠性的關鍵指標之一,也是鋰離子電池市場準入和產品交易中必須考查的指標。鋰離子電池的壽命測試評價通常需要數月甚至幾年,對于產品設計的優化迭代非常不利;對于鋰離子電池生產制造單位來說,壽命測試的漫長反饋周期,可能影響產品型式試驗、批次穩定判定和用戶認同。
移動電話、電動車、電力儲能、空間電源等不同應用領域都發布了相應的循環壽命測試方法,采用盡可能準確地模擬運行工況條件的充放電方案,設定壽命終止判定閾值,以此對生產廠家的產品進行壽命特性的評價[2-5]。但有的標準按照其規定進行壽命測試的周期較長,事實上無法在電池投入使用前完成壽命測試;有的標準為了縮短測試時間采用電池生命周期前部分的測試數據來進行全程壽命的判斷。例如文獻[5]所提出的低地球軌道(Low Earth Orbit,LEO)衛星用鋰離子電池的循環壽命測試方案,真實模擬了LEO 衛星用鋰離子電池的在軌工作制度,設計壽命為5~8 a(循環30 000~48 000 次)的電池按標準進行壽命測試時間也需要5~8 a,照此進行評價是不可取的;又如在文獻[4]中將壽命測試的判定節點設定為衰退至初始容量的90%前的循環次數不少于1 000 次,通過非全周期壽命測試(儲能用鋰離子電池的壽命截止閾值通常是衰退至初始容量的80%[6]或更低)的數據來進行壽命判定;文獻[3]中則提供了兩種選擇,用戶可以根據實際情況選擇衰退至90%初始容量或80%初始容量兩個判定節點,顯然是為了縮短測試周期的一種妥協。采用半程循環測試結果直接進行全周期壽命判定必然隱含了一定的長期運行風險。另外,在鋰離子電池設計或使用階段,需要評價電池對不同的使用場景的長期運行耐受性,例如文獻[7]中,為了評估不同的快速充電方案對壽命的影響,如果不配合快速壽命評價方法,則需要進行200 多個樣品的完整循環壽命測試,占用大量的測試資源并耗費大量時間。因此,采用單一的測試方法往往在評價周期和測試實驗工作量上無法滿足精準設計、縮短開發周期的實際需求。
鋰離子電池的容量衰退是一個很復雜的過程,涉及眾多的副反應,這些副反應的機理與材料體系、電池設計密切相關且相互耦合,副反應的種類、反應速率與工況條件,如倍率、荷電狀態(State of Charge,SOC)、放電深度(Depth of Discharge,DOD)等有關,同時也受到外部環境如溫度、應力等影響;同時,為了能夠提前預知電池的壽命特性,研究者們嘗試了各種各樣的建模技術和加速試驗方法,其中面向預測與系統健康管理(Prognostics and Health Management,PHM)的居多,針對快速壽命評價的相關研究較少,且缺乏系統性。這種情況導致想要建立用于鋰離子電池壽命評估和判定的快速評價方法面臨較大難度。
本文面向鋰離子電池的壽命特性驗證及鋰離子電池產品在不同使用條件下的長期運行耐受性評價,歸納近年來的鋰離子電池快速壽命評價技術的研究現狀,對適用于快速壽命評價的加速壽命試驗方法、壽命預測技術進行總結分析,對能夠實現快速、高精度和適應性強的快速壽命評價方法實例進行梳理,為相關領域研究人員提供參考。
1 鋰離子電池快速壽命評價的概念與內涵
1.1 鋰離子電池快速壽命評價的概念
鋰離子電池壽命是指從生命初期(Beginning of Life,BOL)至電池的性能達到失效閾值即壽命末期(End of Life,EOL)區間內經歷的總循環次數或時間[8]。鋰離子電池快速壽命評價指利用加速壽命衰退試驗快速獲得電池性能衰退軌跡,配合相應的壽命預測技術,在較短時間內完成常規運行條件下鋰離子電池壽命評價。為了便于后文的理解,需要首先對有關概念予以說明。
1.1.1 快速壽命評價和PHM 中的RUL 預測
近年來,鋰離子電池剩余壽命(Remaining Useful Life,RUL)預測作為PHM 的關鍵技術之一受到關注,準確的RUL 預測為電池系統的預先維護、更換等提供支持[9];也可嵌入電源管理系統(Battery Management System,BMS),用于鋰離子電池系統的安全性和可靠性管理[10]。
RUL 預測過程包括兩個階段,如圖1 所示。圖中,第一階段是衰退狀態識別階段,即根據電池已知運行數據和狀態監測信息估計電池的性能衰退狀態;第二階段是性能預測階段,采用一定算法預測性能狀態演化趨勢,直至性能衰退至失效閾值,第二階段所經歷的充放電循環次數即為RUL。全周期壽命即第一階段和第二階段的累計。
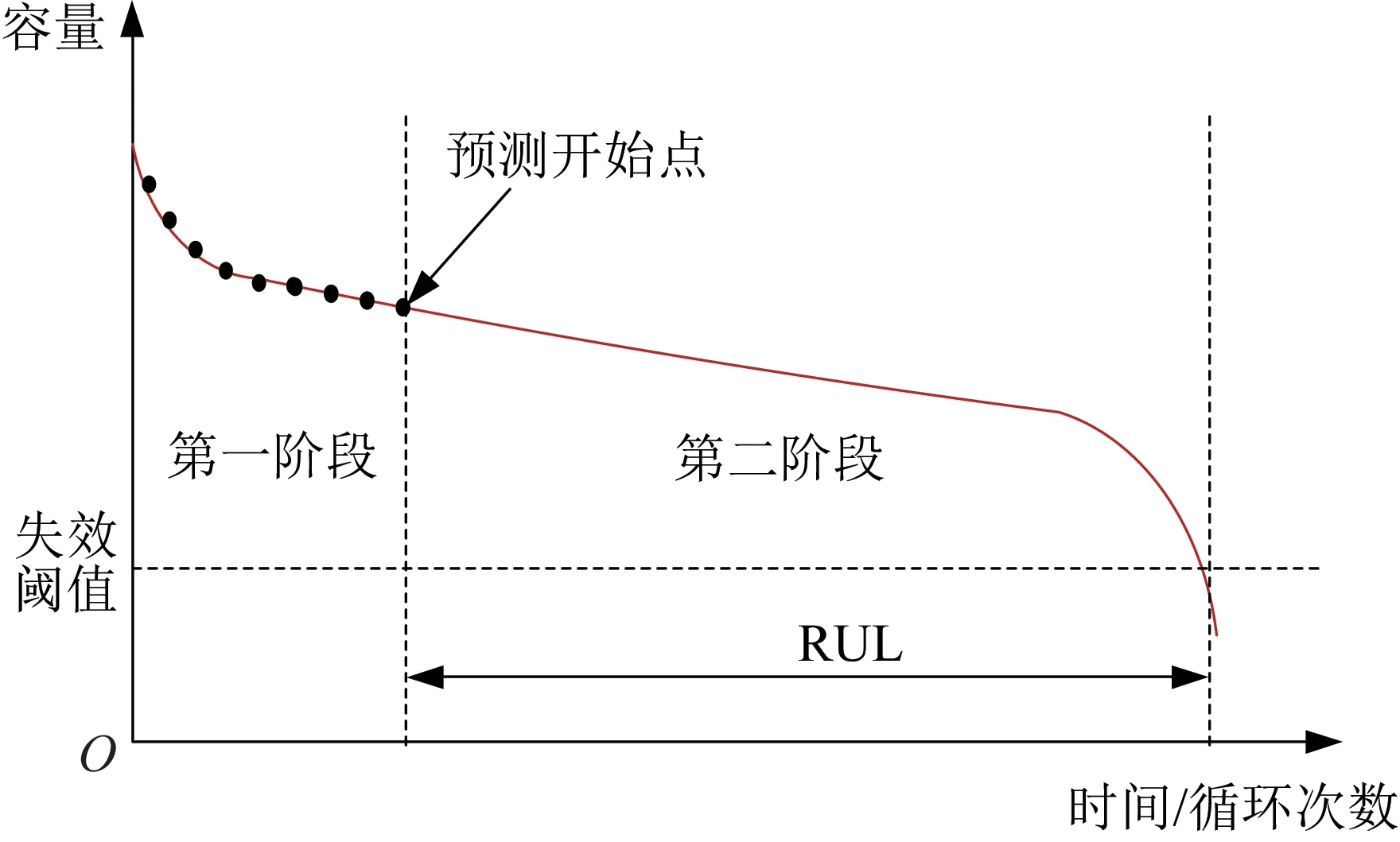
圖1 RUL 預測Fig.1 Schematic diagram of RUL prediction for lithiumion batteries
用于快速壽命評價和PHM 的RUL 預測有所不同,主要差別之一在于用于預測的數據不同。一方面數據來源不同,快速壽命評價采用的數據是抽樣樣本在標準工況下的測試數據,樣本須具有典型性,即樣本能夠代表總體的程度;而PHM 所分析的對象是電池產品在實際工況環境下的運行數據,具有更多不確定性;另一方面是數據的時間跨度不同,由于快速壽命評價需要在全壽命周期的幾分之一時間內完成壽命預測,因此利用電池生命前期較短時段的數據完成預測后,預測結果即作為判定電池壽命特性的依據;PHM 則可以隨著新的運行數據的輸入,不斷更新預測結果,隨著數據量的積累通常也可以提高預測準確度。
兩種應用方向的RUL 預測所依托的基礎預測技術、加速壽命試驗方法并無本質差別,與PHM 應用相比,快速壽命評價要求RUL 預測具備較強的長期預測能力,而不必在算法中考慮不確定性/置信度表達:
1)長期預測能力。
快速壽命評價在圖1 的第一階段末期即完成第二階段的預測,因此采用的預測方法必須具有長期預測(Long-Term Prediction)[11]性能。而且盡量壓縮壽命評價周期,第一階段越短越好。文獻[12-16]用于模型訓練和參數調整的循環次數為全周期壽命的40%~70%;文獻[17]采用模擬工況數據訓練模型,然后用20%~25%的少量正常運行衰退的數據完成全周期壽命預測。在PHM 的RUL 預測中,整體趨勢預測是一種優勢,但長期預測并不是必需的,需要根據實際運行場景、運算量與速度、不確定性表達等綜合因素選擇預測方法。
2)預測不確定性的控制。
壽命預測過程中的一些因素可能造成預測的波動,例如樣品的不一致性、測試不確定性、運行環境的不確定性等[12]。RUL 在線預測方法通過包含置信度的不確定性表達,表示預測值的置信區間[18]。而快速壽命評價必須有明確的判定結果,因此通過控制測試樣品和試驗條件來降低不確定性:通過樣品的一致性評估與篩選來降低系統不確定性;采用精度較高的測試設備降低測試不確定性;通過控制測試環境,降低運行環境的不確定性。
由于快速壽命評價所采用的RUL 預測的以上特點,在選用預測技術時,一方面必須具備長期預測能力;另一方面對預測結果的不確定性表達則不做要求。
1.1.2 日歷壽命與日歷老化、循環壽命與循環老化
在工程應用中,常根據鋰離子電池壽命終止前所進行的充放電操作方式的不同,將電池壽命分為循環壽命、存儲壽命和使用壽命三種[19],而在鋰離子電池壽命評價或RUL 預測的文獻中,通常依據衰退機理的不同將壽命分為循環壽命(Cycle-life)和日歷壽命(Calendar-life)進行分析。循環壽命是指EOL 前電池充放電循環總次數,充放電過程中電池發生循環老化(Cycle Aging),產生循環容量損失;日歷壽命是指幾乎沒有充放電影響情況下達到EOL 前經歷的時間[20-21],電池在全生命周期內都有日歷老化(Calendar Aging)發生,產生日歷容量損失。電池在頻繁充放電情況下的壽命主要取決于循環壽命,而在很少充放電情況下的壽命主要取決于日歷壽命[22]。大多數實際應用情景下鋰離子電池在生命周期內都處于日歷老化與循環老化疊加的狀態,兩者共同作用決定了鋰離子電池的實際壽命[23]。
1.2 鋰離子電池快速壽命評價的內涵
快速壽命評價技術主要應用于鋰離子電池/電池組的設計壽命驗證、電池在不同使用條件下的長期運行耐受性評價,或在商業活動中產品準入、交付的質量判定等目的,因此要求評價方法具有快速高效、高準確度、對不同樣品或使用條件的適用性強等特點。尤其是在高價值、高可靠性應用領域,需要在評價周期、可信度、試驗量和方法難度等方面進行綜合考慮,形成相應的快速壽命評價方法。
鋰離子電池快速壽命評價屬于離線評價,在實驗室中完成,通過經過設計的試驗方法獲取預測所需的數據集,通常采用加速壽命試驗和常規衰退試驗同步進行,根據可獲得的數據情況、運行工況以及人員專業技術背景等選擇適合的快速評價技術。
2 鋰離子電池快速壽命評價技術
快速壽命評價技術包括壽命預測技術和加速壽命試驗方法,加速壽命試驗方法快速地為壽命預測提供衰退數據和衰退模式;壽命預測技術基于經驗、模型或數據驅動的方法建立衰退規律的模型描述,實現壽命預測。
2.1 鋰離子電池壽命預測技術
壽命預測是指利用學習訓練得到的模型參數進行仿真計算,在給定的條件下,不斷增加循環次數直至性能估計值下降到失效閾值,求出失效閾值前剩余循環周期次數[24]。能夠代表電池的健康狀態即壽命衰退狀態的參數被稱為健康因子(Health Indicator,HI)。容量和內阻[25]可以直接用來預測RUL,被稱為直接健康因子(Direct Health Indicator,DHI)。特征參數成為間接健康因子(Refined Health Indicator,RHI),包括兩類:一類是電流、電壓、溫度及基于這些測試量的分析特征,如容量增量分析(Incremental Capacity Analysis,ICA)或電壓差分分析(Differential Voltage Analysis,DVA);另一類是分析現有數據的統計結果而得到的RHI[26-27],例如放電電壓變化的最小值、最大值和波動程度,或電壓序列的樣本熵[28]。如果采用RHI 進行RUL 預測,需建立RHI 和DHI 的對應關系。
鋰離子電池壽命預測技術從建模原理的角度可分為基于經驗知識的方法、基于模型的方法和基于數據驅動的方法,如圖2 所示。另外,亦有將多種方法進行結合形成混合方法。
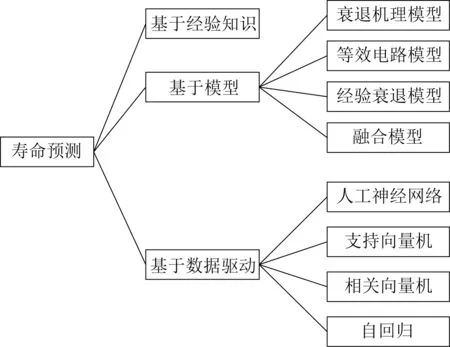
圖2 鋰離子電池壽命預測技術分類Fig.2 Classification of RUL prediction technologies
2.1.1 基于經驗知識的預測技術
基于經驗知識的預測方法屬于直接預測法,不需要建立表征電池老化的性能衰退因子,而是依據一些統計規律對電池壽命進行粗略估計。基于專家系統的預測方法包括以下三種:循環周期數法、安時法與加權安時法、面向事件的老化累積方法[29]。
循環周期數法依據經驗制定一些標準對不同條件下的循環周期數或使用年限進行等效,來計量電池達到失效閾值前的壽命。文獻[30]根據范特霍夫定律簡單地將電池在60 ℃下擱置200 d 等效為常溫下儲存10 a。安時法與加權安時法用處理電量的累計安時數來計量壽命,加權安時法則對不同工作條件下的安時電量值乘以一個加權系數,加權后的電量計入累計安時數。面向事件的老化累計方法是羅列能夠造成性能衰退的獨立事件(例如過充電或過放電),每個事件的發生都造成一定程度的性能衰退,當所有事件造成的衰退累計導致電池性能達到失效閾值,則電池壽命終止。文獻[31]提出權重安時老化模型和面向事件的老化模型。
基于經驗的方法是目前最常使用的方法,其基礎是實際測試數據,當測試數據比較充分時,具有很高的精度及可靠性。缺點是耗時長,需要大量的實驗數據作為基礎,且更換評價對象即需要重新進行測試[32],而在測試數據不是很充分的情況下,則只能做粗略估計,精度較差。
2.1.2 基于模型的壽命預測
基于模型的壽命預測技術根據模型的種類分為基于衰退機理模型、等效電路模型和經驗衰退模型方法。
1) 基于衰退機理模型的壽命預測
在所有方法中,第一性原理模型的方法是依靠對電池微觀行為分析和物理化學過程進行描述所建立的機理模型來進行壽命預測,其他各種方法則是依靠宏觀數據進行歸納分析來實現這一過程[33]。該方法首先構建基于正負極開路電壓模型(Open Circuit Voltage,OCV)的電池OCV 模型,然后基于歐姆定律、基爾霍夫電壓電流定律、電化學反應過程(Butler-Volmer 定律)、擴散過程(Fick 定律)等對電池物理化學過程進行模型描述[34]。在性能模型基礎上,建立不同應力條件下的衰退過程的衰退模型,并將其應用于電池壽命預測。基于機理模型的壽命預測方法反映了電池內部真實的老化過程,可解釋性強,衰退模型可預測各種狀態條件和運行模式下的性能。缺點是作為方法基礎的模型復雜度高,建模和模型調整所需的專業技能要求較高。另外,鋰離子電池性能衰退機理和模式十分復雜,建立完善的衰退模型存在較大的難度[35]。
機理模型的內部參數如活性物質體積分量、固相擴散系數等可以理解為該方法的間接健康因子(Refined Health Indicator,RHI),而性能狀態模型則是從RHI 獲得直接健康因子(Direct Health Indicator,DHI)如容量的關聯方式,見表1。
2) 基于等效電路模型的預測
等效電路模型通過電氣元件構成的電路模型,對電池動態特性進行等效或近似。基于等效電路模型的壽命預測方法:首先也需要建立最大可用容量模型,通常采用類似于阿倫尼烏斯的模型描述容量衰退;然后分析等效電路參數的衰退規律,建立鋰離子電池衰退模型。等效電路模型數學形式簡單,含有相對較少的參數,利于參數辨識,容易得到狀態空間方程。缺點是等效電路模型并不能完全描述鋰離子電池復雜的動態特性,且模型參數在電池不同荷電狀態為非恒定值,在多重擬合的過程中引入更多誤差,影響預測精度。
等效電路模型的參數可視為該方法RHI,通過OCV 模型和等效電路可以獲得DHI。
3) 基于經驗衰退模型的壽命預測
基于經驗模型的壽命預測采用不同的衰退模型擬合衰退趨勢,或建立近似方程用來描述和預測電池的衰退狀態,通常采用指數函數[36]和多項式構建經驗衰退模型[37-38]。
基于經驗衰退模型的方法將反映電池老化的參數(如容量、內阻[39]、放電終壓[39-40]、溫度變化率[41]、容量增量曲線等)作為RHI,建立狀態參數與DHI 或URL 的映射,描述狀態參數隨時間的變化趨勢,或系統前后兩個時刻狀態變量之間的遞推關系,實現RUL 預測。
經驗衰退模型常與濾波算法結合用以更新模型參數,卡爾曼濾波(Kalman Filter,KF)和粒子濾波(Particle Filter,PF)是最常用的參數估計方法。PF包含一個預測步驟和一個更新步驟,適用于時變的線性體系,而經驗模型是非線性,擴展卡爾曼濾波和無跡卡爾曼濾波[42]改善非線性處理能力。PF 能夠處理大部分非線性和非高斯噪聲,因此適合RUL 預測。
經驗衰退模型不考慮電池內部的電化學過程,相比于基于機理模型、等效電路模型的壽命預測,模型復雜度低,計算簡單,容易實施,但這一優點在離線計算平臺上并不突出。缺點是模型沒有內在衰退機理支撐,而是建立逼近衰退軌跡的經驗模型再進行外推預測,預測精度較差。
4) 基于融合模型的壽命
為了從現有數據中提取更多的特征和信息,發展了將上述三種模型方法融合的技術。第一種融合模型是將兩種模型方法融合建立一個新的模型,例如文獻[4]將容量衰退模型(經驗模型)與等效電路模型(Equivalent Circuit Model,ECM)融合,新的模型在保持預測精度的前提下,改善了預測過程的標準方差;第二種是采用不同的模型進行模型參數的計算,例如文獻[5]基于熱力學模型和ECM 模型對核心溫度、SOC 和容量進行估計,然后將以上估計值用于確定容量經驗衰退模型的參數,再采用擬合經驗模型進行RUL 預測。
綜上所述,機理模型需要對電池內部反應過程機理有深入理解,且計算復雜度高,但正因為機理模型描述了電池內部電化學過程,RHI 能夠代表內部真實健康狀態,所以基于機理模型的與預測方法預測精度高;基于ECM 的預測方法一定程度上采用了電池機理,相比機理模型ECM 更簡單,缺點是電化學阻抗譜(Electrochemical Impedance Spectroscopy,EIS)檢測難度高,而采用混合動力脈沖能力特性(Hybrid Pulse Power Characteristic,HPPC)工況等方法提取的模型參數沒有實際物理意義,隨SOC 變化而變化,因此模型多重等效影響了估算精度。經驗模型簡單易行,但根據前期數據所建立的規律不能準確預測未來變化趨勢,可以通過融合模型用來平衡易實施程度和模型性能。另外,濾波方法常被采用進行模型動態更新,提高預測精度。
2.1.3 基于數據驅動的壽命預測
基于數據驅動的預測方法不需要研究鋰離子電池的復雜機理,而是深度挖掘測試數據其中的隱含信息和規律,對電池壽命進行預測。因為數據驅動的壽命預測方法直接基于測試數據,能夠從實際運行數據中捕捉狀態特征和衰退特征,因此很適合在線應用。但通過合理的試驗設計、合理的健康因子構建,也能在進行早期壽命預測時有較好的效果[7,43]。
數據驅動的壽命預測流程分為三步:電池衰退機理分析、電池數據衰退特征生成、數據驅動建模方法[44],其中數據驅動建模包括算法結構、數據驅動方法,見表1。衰退特征即DHI 和RHI。數據驅動建模方法常用的有神經網絡、支持向量機、相關向量機、自回歸等。算法結構分為四種,即直接結構[45-46]、遞推結構[47-48]、非遞推結構[49-50]和短期結構[51-52]。這些算法結構在在線時變的測試信息獲取條件下對算法模型進行動態更新。在進行早期預測時如圖1 所示,停止新的測試數據輸入,算法模型和參數也就不再更新。
1)人工神經網絡
人工神經網絡(Artificial Neural Networks,ANN)是模擬人腦的神經系統處理復雜信息的一種抽象數學模型,由輸入層、隱藏層、輸出層構成,人工神經元按照某種規則相互連接,是一種基于數據的、典型的非線性方法[53],自組織和自學習能力強,輸出的結果是點估計值,廣泛應用于多種非線性預測領域。缺點是在預測過程中的初始權重值和隱藏層閾值都是隨機生成的,易收斂于局部極值;網絡結構的確定需要大量數據對神經元進行訓練,而實際鋰離子電池的衰退數據多為小樣本數據,導致預測精度有限。
2)自回歸模型。
自回歸模型(Autoegressive Model,AR)是一種時間序列分析方法,基于過去若干時刻的觀察值的線性組合來預測未來某個時刻的系統狀態。AR 模型在分類上屬于一種統計方法,每種統計方法在預測算法結構上都有明確定型,基于AR 的預測算法結構時遞推結構見表1。AR 模型應用簡單方便,適用于樣本數量較小的情況。缺點是系統的狀態是一種線性預測模型,其在長期預測中精度較低[54-57]。為了解決這一問題,在AR 基礎上引入非線性衰退因子發展出ND-AR,但不能根本解決其非線性數據擬合能力弱的問題。
3)支持向量機
支持向量機(Support Vector Machine,SVM)以結構風險最小化作為最優原則,能夠獲得全局最優解,適用于小樣本、非線性問題的處理。缺點是超參數難以確定、核函數必須滿足Mercer 條件,嚴重影響了其預測性能。文獻[52]基于在線數據,采用PF 動態更新SVR 模型參數,當獲得新的測試數據時,對SVR 模型進行再訓練。文獻[58]采用增量學習算法替代耗時的再訓練來實現模型更新。
4)相關向量機
相關向量機(Relevance Vector Machine,RVM)的優點是自動參數設置、任意使用核函數,且計算量較小。與SVM 相比它的相關向量更加稀疏,而鋰離子電池的實際衰退數據存在較大的波動,導致基于RVM 的預測方法的預測結果穩定性不高;此外,RVM 算法存在長期預測效果不佳的問題[49,59]。
以上介紹的僅是基于數據驅動的壽命預測方法中常用的幾種,其他方法比如灰色模型、維納過程、離散小波變換等,都各具特色。基于數據驅動的壽命預測方法各有較多衍生和優化算法,或通過多種方法混合使用,面向實際應用需求針對自身的缺陷進行彌補和優化。針對數據需求量大的問題,可以通過試驗設計建立較豐富的模擬數據進行改進。
2.2 加速壽命試驗方法
加速壽命試驗的目的是在較短時間內獲取用來預測鋰離子電池長期性能的有效數據。加速壽命試驗在加快鋰離子電池的衰退的同時不改變衰退機理和模式。加速壽命試驗方法中加速應力的選擇和加速應力邊界確定是關鍵。
2.2.1 衰退機理分析
衰退機理的分析對于加速衰退試驗設計、壽命預測方法選擇都非常重要。
鋰離子電池的衰退機理復雜且互相耦合,受到電池內外多種因素的制約和影響。首先與電池的材料體系、電極與電池設計有關[60];其次受到外部應力包括運行條件如電壓、電流密度、SOC 和DOD等影響[61-62]。按照衰退結果對電池容量的影響機制,鋰離子電池容量衰退可以分為熱力學容量衰退即電池的最大可用容量的變化,以及動力學衰退即影響充放電速率和倍率表現的極化特性變化。熱力學容量損失主要有兩個方面:一是活性鋰損失(Loss of Lithium Inventory,LLI);二是活性物質損失(Lost of Active Material,LAM)。極化造成的容量減少的原因則是由于歐姆阻抗增加、固液相傳質和電荷轉移難度增大等因素。熱力學容量衰退的機理及建模研究較多,動力學衰退的原因更加復雜,相關物理模型參數辨識難度更高,因此機理建模難度較高。
鋰離子電池性能衰退的另一個主要特點是在不同生命階段造成鋰離子電池性能衰退的主要原因是不同的。鋰離子電池的非線性老化過程可以大體上分為3 個階段[63](如圖3 所示):第一階段,在生命初期的數個循環,由于SEI 膜的生成造成LLI,表現為容量快速下降;第二階段,各種副反應引起的性能下降趨勢穩定;第三階段,接近電池生命末期容量急劇下降、阻抗增加,其原因有鋰金屬析出導致的LLI[64-65]、電解液干涸[66]或黏結劑失效造成的LAM、材料衰變造成的LAM、體積變化[67]等。鋰離子電池非線性衰退的描述是壽命預測的主要難點之一。不同階段的電池容量損失及可能原因如圖3 所示。

圖3 不同階段的電池容量損失及可能機理[63]Fig.3 Battery capacity fade and possible mechanisms in different stages[63]
2.2.2 加速應力選擇
加速應力選擇的主要依據是實際運行工況條件下的壽命衰退機理[61]及其對外部應力的敏感度,選取與實際運行條件下一致的衰退模式,結合經驗、試驗、失效模式與影響分析(Failure Mode and Effect Analysis,FMEA),確定加速應力和加速方法。常用的加速方法有溫度、電流密度、SOC 和DOD 等。例如造成LAM 的失效機理主要是電壓變化產生的應力,敏感應力是高DOD、過充電等,因此在應力選擇時可以優先采用高DOD 進行加速[68-69],而電池在擱置狀態的容量衰退以固液界面(Solid Electrolyte Interphase,SEI)膜生長引起的LLI 為主,因此采用溫度加速進行擱置加速壽命試驗的方法被廣泛應用[23,70-71]。
2.2.3 加速應力邊界確定
在進行加速壽命試驗之前,首先要確定合適的加速應力水平。高應力水平僅加快衰退,而不改變鋰離子電池的性能衰退機理,對量化描述來說即能夠用同一個衰退模型或算法來呈現加速和常規條件下的衰退過程及結果。衰退機理發生變化的應力閾值即加速應力的合理邊界,加速應力應控制在合理邊界內。
吳正國等[72]設計不同溫度下的鋰離子電池加速試驗,建立老化速率與溫度之間符合Arrhenius 方程的關系表達,對lnk-T-1斜率變化、ICA、EIS 以及電池解體后的析鋰現象、SEM 表征結果進行分析,研究了不同溫度下鋰離子電池容量衰退的機理差異,得到加速電池壽命衰退的適用溫度邊界。
王亞輝等[68]提出在鋰離子電池參數衰退軌跡模型的基礎上,根據Bartlett 檢驗統計量確定衰退機理一致的邊界應力。通過從低應力水平依次向高應力水平比較電池在不同應力水平下的形狀參數是否相等,直到滿足邊界應力條件,進而由此來確定衰退機理一致的邊界應力。
3 鋰離子電池快速壽命評價實例
根據實際應用需求,通常采用預測方法與加速試驗相結合的方式,或者多種預測方法和多種加速試驗的組合,以達到縮短評價時間、提高預測精度的目的。目前研究較多、可行性較強的預測方法可分為以下幾種。
3.1 基于衰退機理模型的快速壽命評價實例
常用的機理模型為偽二維(Pseudo 2 Dimensional,P2D)模型[73]。基于P2D 模型的壽命預測流程如圖4 所示。OCV 模型反映鋰離子電池正負極的最大可用容量及正負極匹配情況,疊加極化過程后形成適應樣品電池的機理模型;經過充放電測試驗證機理模型精度后,進一步在壽命衰退試驗數據基礎上,建立衰退模型;同樣經過試驗驗證衰退模型的仿真精度后,模型用于常規工況條件下的壽命預測。基于機理模型的壽命預測是一種早期壽命預測方法。
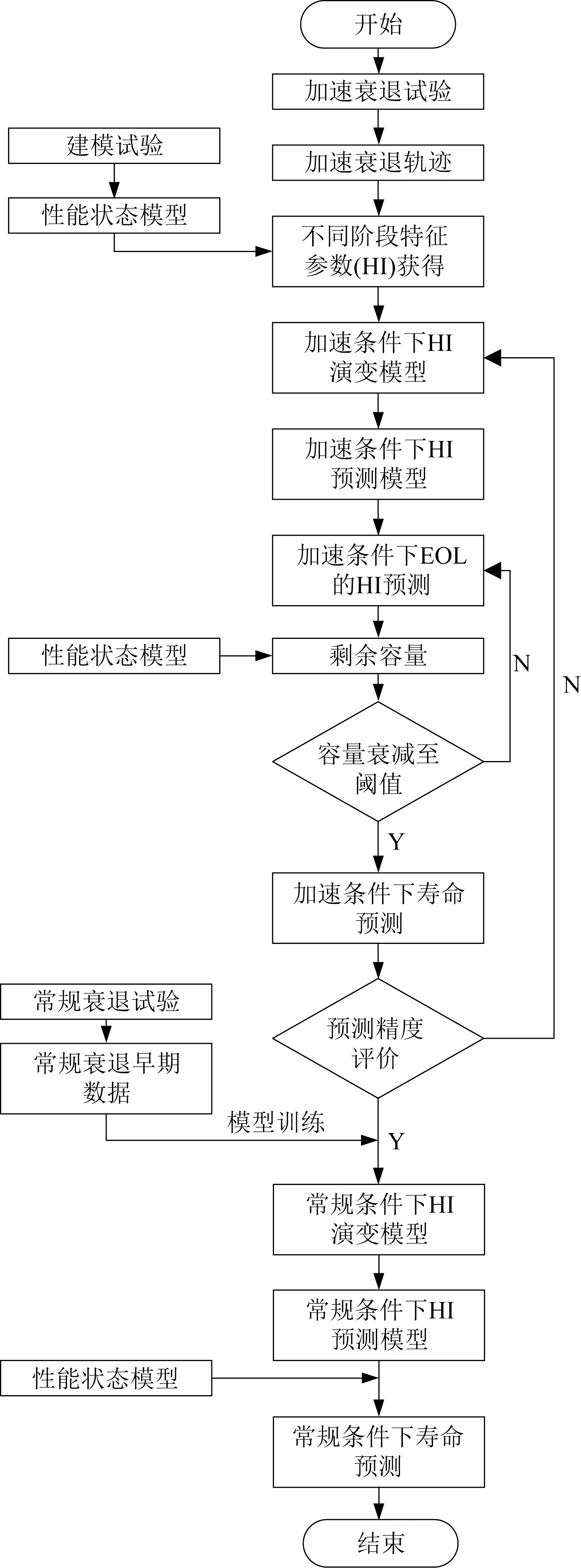
圖4 基于機理的壽命預測方法實現流程Fig.4 Flow chart of the lifetime evaluation method based on the mechanistic model
OCV 模型反映的是鋰離子電池最大可用容量,是準確估計健康狀態(State of Health,SOH)的基礎。王天鷥[74]將活性物質的破裂造成的LAM,以及由于負極活性物質顆粒破裂產生的新的暴露面生成新的SEI 膜造成的LLI 納入衰退模型,在所進行驗證試驗中的容量損失率預測誤差被有效地控制在5%以下。
基于衰退機理模型的快速壽命預測方法實現流程如圖4 所示,流程分為四部分:1)數據獲取試驗,包括獲取建立性能狀態模型(描述內部參數即RHI轉換為容量即DHI 的一組函數)所需數據的試驗、加速壽命試驗和常規壽命試驗;2)建立性能狀態模型即機理模型;3)加速條件下壽命預測模型建立及驗證;4)常規衰退條件下壽命預測模型訓練及預測結果輸出。通過采用加速老化試驗數據建模、常規衰退條件下的模型訓練和早期壽命預測縮短評價周期。
ATALAY 等[75]采用NCA/石墨體系的18650鋰離子電池研究電池在電動車動力應用場景下的容量衰退、非線性老化機理及壽命預測技術,基于P2D 模型,考慮電解液中EC 和DMC 的消耗以及多層SEI 膜種有機鋰鹽與無機鋰鹽構成、析鋰損失和電極孔隙率的堵塞減少等因素,對電池循環壽命的跳水情況進行識別與預測。采用1/3 C 充電1 C 放電循環的數據對模型參數進行校正,再利用校正后的模型參數對1/3 C 充電4 C 放電循環壽命進行預測驗證,預測符合度達到98.7%。
3.2 基于等效電路模型的快速壽命評價實例
基于等效電路模型的快速壽命評價方法與基于機理模型的方法類似之處在于最大可用容量的計算,差別在于采用等效電路的阻抗特性代替了機理模型中的歐姆阻抗、擴散和傳質極化特性。因此基于等效電路模型的快速壽命預測方法實現流程整體上與圖4 類似,主要的差別在于:1)性能狀態模型為等效電路模型,RHI 是為等效電路參數(見表1);2)由于等效電路模型的參數是一個宏觀虛擬參數,不具備實際物理意義,而且隨SOC 的變化而變化,因此等效電路的HI 預測,需要建立加速條件下HI 演變和預測的經驗模型來獲得。
劉珊珊[76]采用LCO 鋰離子電池進行不同應力條件下的加速老化試驗,首先對不同等效電路模型進行最優選擇;然后建立模型參數與SOC 的擬合方程,方程的系數通過優化求解方法確定,形成包括模型參數和方程系數的參數組;最后根據不同應力條件下的測試數據,建立應力條件與方程系數的數值關系,從而對正常應力條件下的壽命進行預測。
3.3 基于經驗衰退模型的快速壽命評價實例
基于經驗衰退模型的壽命預測方法其最大特點是采用經驗模型來表示壽命衰退過程,這些經驗模型通常是指數函數、冪函數或多項式等。
BROUSSLY 等[70]在較早時候提出基于Arrhenius 方程建立不同浮充溫度與活性鋰量衰退參數的關系。Arrhenius 方程是廣泛接受的與溫度相關的衰退模式描述方法,是使用最廣泛的經驗衰退模型。
在空間電源領域,YOSHIDA 等[23]針對空間用LCO/石墨大容量電池(100 Ah)對高軌GEO 衛星(日歷壽命18 a=3 a 儲存+15 a 在軌)和低軌LEO 衛星(日歷壽命11 a=3 a儲存+8 a在軌)的壽命適應性評價,建立了快速壽命評價方法。其中GEO 工況下的壽命評價采用部分加速,即光照期電池處于擱置狀態的日歷壽命采用25 ℃/8 d 等效在軌0 ℃/140 d 的加速方式,將高軌狀態下電池擱置壽命測試的時間縮短94.3%。WANG 等[71]在此基礎上進行了10 個100 Ah 電池串聯電池組對GEO 壽命需求的適應性評價,以證實電池組滿足設計壽命要求。
YOSHIDA 等[23]對LEO 工況下的壽命評價采用全程加速方法,已知循環壽命與循環次數2 次方根成正比,通過增大放電深度即DOD 進行加速,衰退速率與加速應力的關系可通過不同DOD 循環的測試數據獲得。該文獻用了4 a 左右時間完成GEO衛星18 a 和LEO 衛星11 a 的壽命適應性評價。
JIANG 等[77]用ICA 的峰高、峰位置和峰面積等作為SOH 表征參數,采用8 Ah 的NCM/石墨電池提出不同SOC 區間循環和大倍率100% DOD 循環相結合的加速壽命試驗,如圖5 所示,將壽命評價周期縮短75%,壽命預測偏差小于10%。該文獻指出不同SOC 區 間(SOC 區間分別為0~20%、20%~40%、40%~60%、60%~80%、80%~100%)循環條件下LLI 的疊加與100% DOD 循環相等,但分段循環的LAM 比100% DOD 要小,因此采用增大電流密度的100% DOD 循環的方式獲取LAM 相關特征,兩種容量衰退特征采集試驗并行,大大縮短評價周期。

圖5 不同SOC 區間循環與倍率加速100%DOD 循環相結合的快速壽命評價流程Fig.5 Rapid lifetime evaluation process combining cycles with different SOC intervals and rated current accelerating cycles with 100% DOD
3.4 基于數據驅動的快速壽命評價實例
基于數據驅動方法,僅用測試鋰離子電池壽命初期較短的循環測試數據對全周期壽命進行預測的研究在近幾年成為熱點。
MIT 的SEVERSON 等[43]采用124 只商用LFP/石墨電池進行72 種不同倍率下的快充,生成了數據集。提出了三種基于衰退特征的電池壽命早期預測模型:方差模型(Variance Model)僅采用1 個特征參數ΔQ100-10(V)的方差,放電模型(Discharge Model)采用6 個從放電電壓電流提取的特征量,完整模型(Full Model)采用從包括溫度、內阻的所有特征參數里選擇的9 個參數。這些電池循環測試的次數從150 次到2 300 次不等,但早期預測模型只用前100 個循環的數據預測電池剩余壽命的誤差小于9.1%。
FEI 等[78]在MIT 團隊的工作基礎上,利用124 只電池的測試數據,采用elastic net、GPR、SVM、RF、GBRT 和NN 等6 種機器學習方法對鋰離子電池進行早期壽命預測,比較不同機器學習方法預測結果的均方根誤差(Root Mean Square Error,RMSE)。與MIT 團隊的工作相比,RMSE 從173 次循環降到115 次循環。
ATTIA 等[7]利用MIT 團隊的基于數據驅動的早期壽命預測方法結合貝葉斯優化算法,對224 個快速充電方案進行了快速篩選與評價,大幅度縮減了試驗量和評價時間。
4 挑戰與發展趨勢
在鋰離子電池應用領域,尤其在空間電源長壽命、高可靠性應用背景下,形成被普遍接受的快速壽命評價方法仍然是應用單位研制電池時迫切的愿望。快速壽命評價的挑戰主要集中于縮短測試周期、提高評價精度、減少試驗工作量等幾個方面。技術挑戰與發展趨勢有如下幾點。
1)失效機理的深入識別與建模。鋰離子電池的非線性衰退趨勢預測的難點主要在于壽命末期衰退軌跡突變。基于機理的壽命預測方法在長期壽命預測方面具有精度優勢,前提是對衰退機理的完整理解和建模;而基于經驗衰退模型和數據驅動的預測方法都需要對全程衰退軌跡特征的辨識,因此無論采用那種方法進行快速壽命評價,對第三階段的容量衰退規律的識別都是必不可少的。
2)快速壽命預測方法所需的數據獲取。數據驅動的早期壽命預測方法不需要對電池性能及其衰退機理建模,可以避免由于機理識別不充分導致的模型誤差,但由于在壽命評價中沒有批量產品的大數據可以利用,只能依賴有限樣品的測試數據,為了充分辨識到電池衰退的特征數量,試驗設計至關重要,既要滿足對數據驅動算法進行有效訓練的需要,測試樣品和工作量也不能無限擴大。因此需要進一步深入探索試驗設計與數據驅動技術結合的評價技術。
3)發展融合方法。一直以來,具有電化學專業知識背景的研究人員優先選擇基于模型的方法,而不具備電化學專業知識的研究者傾向于選擇基于數據驅動的方法,導致能夠充分發揮兩者優勢的復合技術未得到充分發展,在未來研究中有待更深入有效的技術融合。
4)建立具有廣泛適用性的快速壽命評價規則。現有的方法對操作人員的多學科專業知識要求高,方法的普遍適用性不強,使得快速評測方法沒有得到廣泛的應用,也缺乏足夠的實例和數據進行方法本身優劣的評價。
5)電池傳感技術的發展。鋰離子電池內外置傳感技術是目前檢測技術發展方向之一,該技術的發展有利于直接SOH 參數的獲取和應用,對快速壽命評價大有裨益。
總體看來,面向鋰離子電池快速壽命評價需求,基于機理模型的壽命預測方法最具發展前途,前提是電池衰退機理的深入識別并納入預測模型。基于能獲取充分數據的試驗設計,準確識別的全程衰退特征的數據驅動方法受到廣泛關注,融合模型和復合預測方法將可能被廣泛應用,建立相對簡單、較少測試量和標準化的快速評價方法是下一步發展目標。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
石油瀝青(2021年4期)2021-10-14 08:50:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51