類Clipper 再入返回飛行器氣動特性分析
2023-03-15 02:05:06陳華健李廣興侯小娟
上海航天 2023年1期
關鍵詞:模型
陳華健,李廣興,陳 輝,侯小娟
(上海宇航系統工程研究所,上海 201109)
0 引言
隨著世界各國航天活動的深入與發展,傳統航天器將無法滿足未來高密度的發射需求。設計新型高效低廉的運輸工具,研制新一代載人天地往返運輸系統已成為人類不斷追求的目標。從長遠來看,航天運載器實現可重復使用是降低航天運輸成本、提高運載能力和發射頻率的必經之路[1]。美國、俄羅斯和歐洲都曾對可重復使用運載器進行了相關研究,包括航天飛機、“快船”(Clipper)返回艙和X-34、“云霄塔”(Skylon)等空天飛機設計方案,并取得了一定的成果[2]。
目前,傳統一次性使用的飛船使用成本高昂,功能單一,遠未滿足低成本、可重復使用的未來航天發展需求。空間站下行、載人月球/火星探測和商業航天等任務對再入返回技術也提出了迫切需求,未來需要發展一種新型的返回飛行器,作為現有新飛船的有效補充。以Clipper 為代表的升力體式返回艙,氣動效率介于升力-彈道式返回艙和帶翼升力體軌道器之間,升阻比足以使返回艙進行大范圍的機動滑翔,并可有效地降低過載峰值和熱載峰值,維護方便、成本低廉,具有可重復使用的潛力,可作為未來再入返回飛行器的選擇方案之一[3]。
因此,基于計算流體動力學(Computational Fluid Dynamics,CFD)技術,對類Clipper 體再入返回飛行器進行了數值模擬研究。首先,選取Clipper飛船返回艙作為研究對象,采用近似反設計方法,對飛行器氣動外形開展幾何建模;其次,研究飛行器在再入返回過程中,飛行包絡內不同高度、不同馬赫數(Ma)和不同攻角等流場條件下的氣動特性,并進行對比分析;最后,在計算結果的基礎上,結合流場特性,進一步探討再入返回飛行器的飛行穩定性,以得出具有實際意義的結論,為類Clipper 體的再入返回飛行器設計提供一定參考。
1 幾何建模與網格劃分
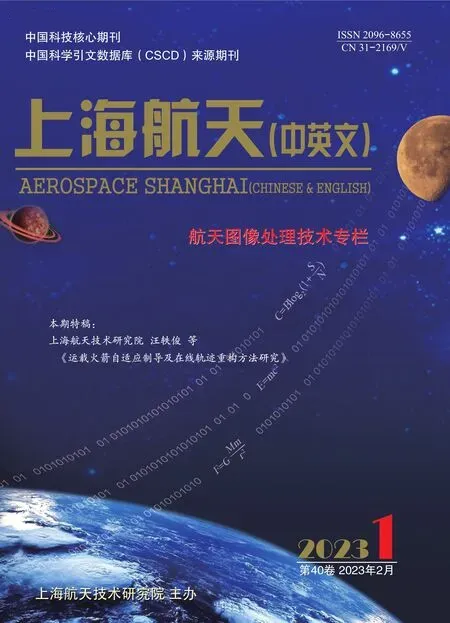
“快船”研制方案主要分為2 種:1)升力體式外形,借助降落傘著陸;2)翼身組合體式外形,類似于航天飛機一樣帶有機翼,可在跑道著陸[4],如圖1(b)所示。為了對“快船”基本構型的氣動特性有較為全面的認識和了解,以便后續進行改型設計研究,主要參考升力體式Clipper 返回艙外形,根據其主要設計參數,采用近似反設計的方法,利用形狀控制函數,基于圓錐曲線拼接的思想,將控制線函數封閉成統一的參數化截面形狀函數,并動態調整控制參數,快速形成飛行器氣動外形的參數化幾何化建模[5]。
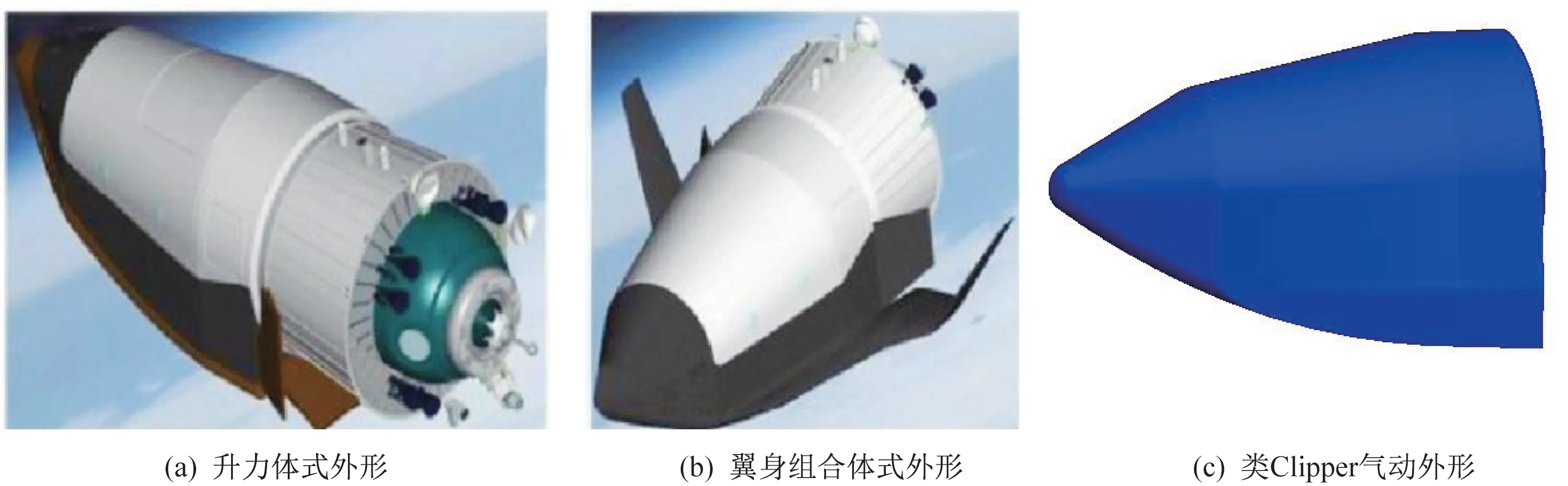
圖1 類Clipper 飛行器幾何外形Fig.1 Geometric configuration of the Clipper-like capsule
按照Clipper 外形的幾何特征,以飛行器頭部頂點O為原點,通過橫、縱向剖面的曲線來描述整個三維飛行器。在XOZ縱向剖面中,Oa段為雙曲線的一支(其漸近線傾角為θ1),ab段、bc段均為直線,ce段為半橢圓,de段 與bc段關于OX軸對稱,Od段 則用拋物線表示;在YOZ橫向剖面中,由pmq圓弧段、pf切線段、qg切線段和fg橢圓弧段(扁率e1)構成[6-7]。因此,整個飛行器參數化幾何模型可通過θ1、R1、R2、R3、L1、L2、L3、L4、β和e1共10 個參數來描述。類Clipper 飛行器參數化幾何模型如圖2 所示。
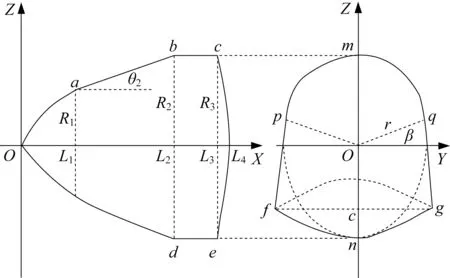
圖2 類Clipper 飛行器參數化幾何模型Fig.2 Parameterized geometric model of the Clipperlike capsule
在給定飛行器外包絡、有效載荷、容積率等約束條件下,獲得氣動外形如圖1(c)所示。由圖1(c)可知,類Clipper 再入返回飛行器具有典型的鈍頭體特征,飛行器底面為過渡均勻的平滑曲面,飛行器上端面鼻錐部分、機身中端和尾部由不同坡角的曲面構成。飛行器質量為45 kg,質心設置在全長的1/2 位置處,幾何模型特征量具體取值見表1,全長為1 126.73 mm。
表1 幾何模型特征量取值Tab.1 Characteristic quantity values of the geometric model
基于圖1(c)再入返回飛行器的幾何模型,采用非結構網格生成方法,同時為了保證計算結果的合理性與精確度,對飛行器頭部端點、外形過渡段以及機身周圍區域等地方進行網格局部加密設置。其中,由于研究對象具有良好的面對稱性,計算無側滑時只需對飛行器對稱面一側的流場進行網格劃分。
整個飛行器計算域采用圓柱體,通過自動化網格生成得到網格文件,計算域包絡范圍長度根據飛行狀態超聲速和亞聲速進行區分,如圖3 所示。再入返回飛行器網格劃分如圖4 所示。由圖4 可知,在飛行器表面形狀變化劇烈的區域及機身周圍進行了網格加密。
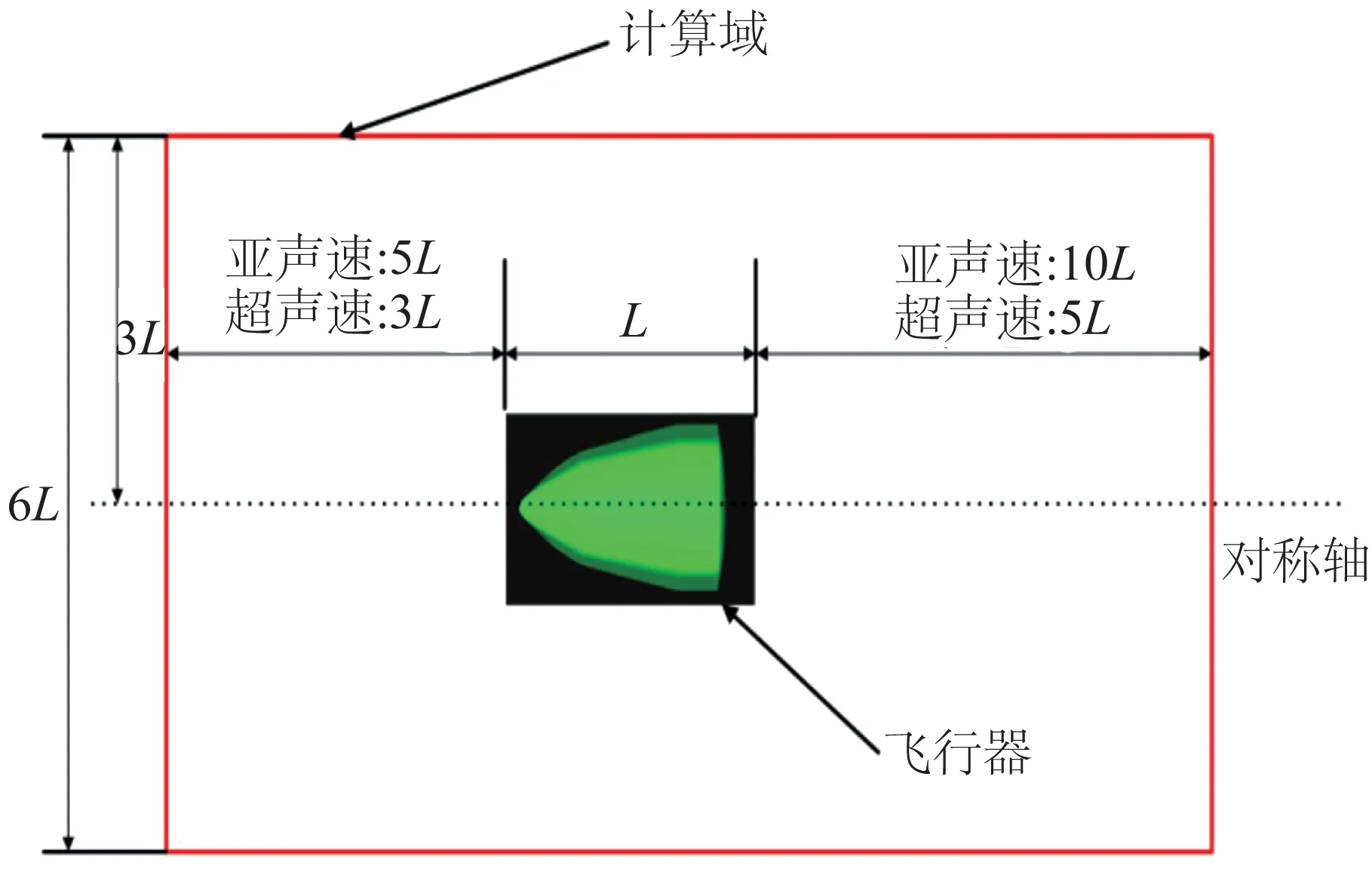
圖3 再入返回飛行器計算域劃分Fig.3 Computing domain partition of the re-entry return capsule
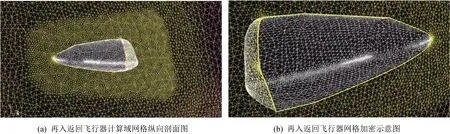
圖4 再入返回飛行器網格劃分示意圖Fig.4 Grid partition diagram of the re-entry return capsule
2 再入返回飛行器氣動力數值模擬與分析
再入返回器返回地球時,在不同飛行高度下會涉及自由分子流、過渡區、滑流區、連續區的流動狀態和高超聲速、超聲速、跨聲速、亞聲速的流動速度的變化,其氣動環境和流場結構十分復雜[8]。因此,采用CFD 數值模擬方法,針對類Clipper 返回艙外形的再入返回飛行器,探討不同高度(h)、不同Ma和不同攻角(α)下的氣動特性,并研究其流場規律。
2.1 數值計算方法
數值模擬應用目前使用范圍最廣的Fluent 軟件進行仿真,通過求解三維Navier-Stokes 方程來計算返回器在大氣飛行過程中的氣動性能。采用有限體積法離散,湍流模型采用k-ωSST 模型以提高對流場特征的捕捉精度[9],選擇密度基求解器和隱式耦合求解法,梯度計算基于格林-高斯函數方法。
為了驗證計算結果的有效性,選擇半錐角為θc=10°的尖錐標準模型(HSCM-2 模型)(如圖5 所示)進行計算,并與風洞試驗結果進行對比[10]。計算工況選擇來流馬赫數Ma=5,結果如圖6 所示,其中CN 為模型法向力系數,CA 為模型軸向力系數。由圖6 可知,數值模擬計算結果與文獻[10]的風洞試驗結果吻合較好,變化規律一致,與試驗結果誤差不超過5%。
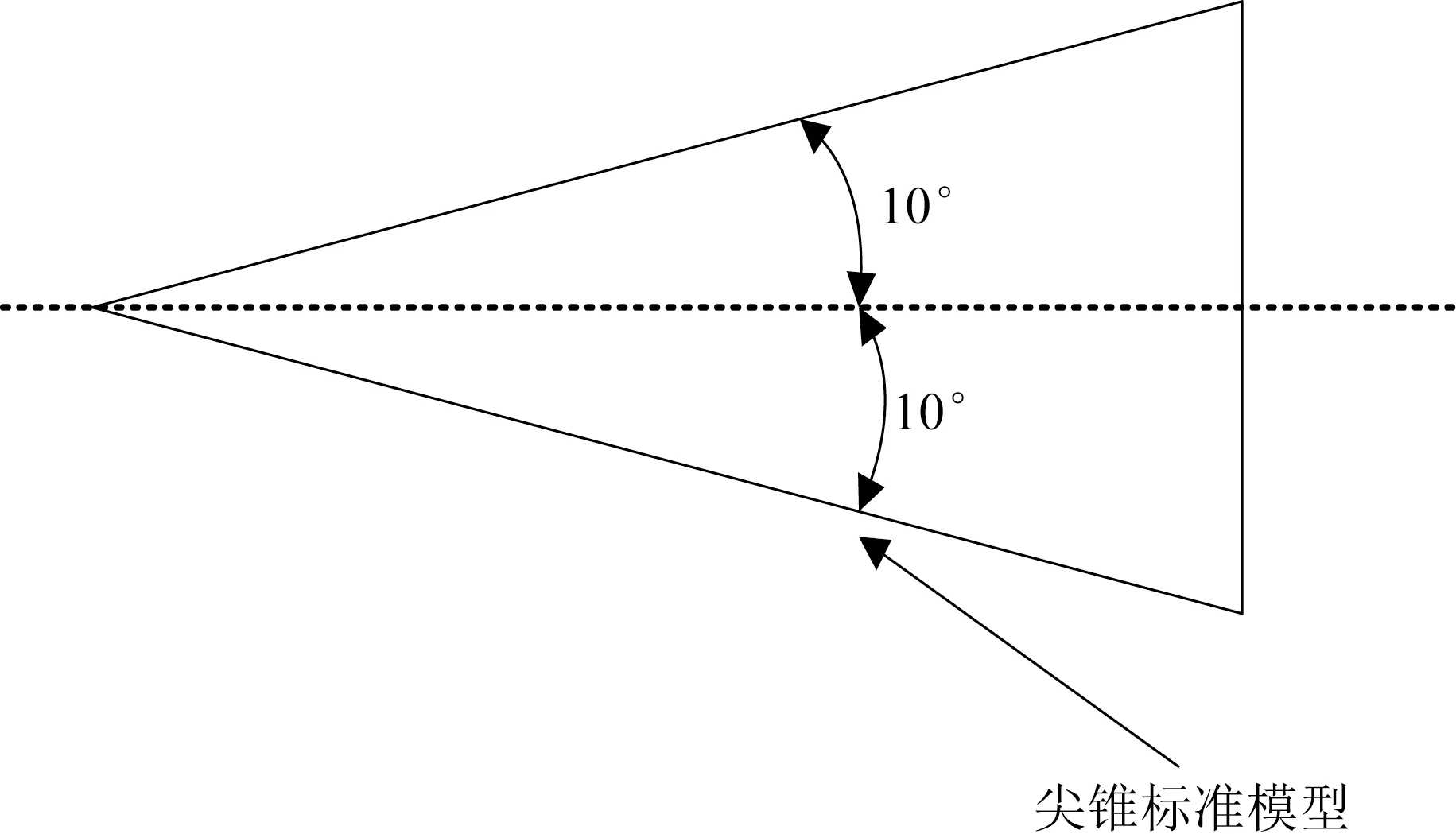
圖5 10° 尖錐標準模型Fig.5 10° sharp cone standard model
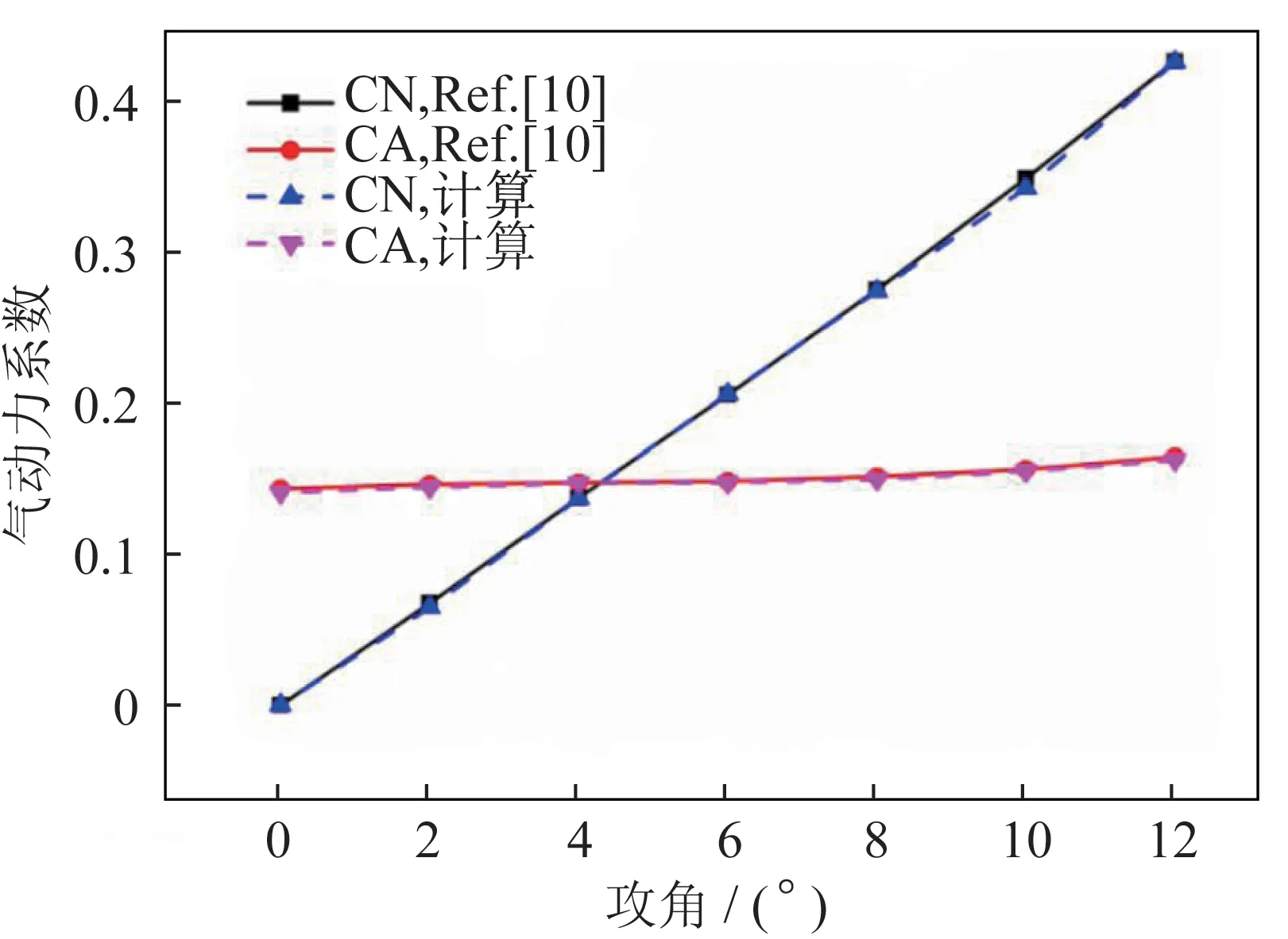
圖6 計算結果對比Fig.6 Comparison of calculated results
2.2 再入返回器氣動特性分析
為分析返回器在整個再入過程的氣動特性,在飛行器再入返回的高度-馬赫數走廊區間內適當取值,分別以10、25、36、50、80 和100 km 高度為研究目標點,最終選擇飛行器的氣動計算狀態,見表2。
表2 飛行器的氣動計算狀態Tab.2 Aerodynamic calculation status of the Clipperlike capsule
高度為36 km 時,飛行馬赫數Ma=4、攻角6°計算狀態下的流場密度分布云圖如圖7 所示。由圖可知,具有鈍頭雙錐外形特征的類Clipper 再入返回飛行器在頭部形成了一個弓形激波,這是超聲速氣流特有的現象。進一步分析發現,飛行器頭部弓形激波[11]的迎風面會隨著攻角的增大逐漸緊貼機身底部,背風面激波會逐漸遠離機身表面[12]。
圖7 h=36 km,Ma=4,α=6° 下的對稱截面密度云圖Fig.7 Density contours of the symmetrical section when h=36 km,Ma=4,and α=6°
該計算狀態下,飛行器縱向對稱截面的速度分布云圖和流場流線分布如圖8 所示。由圖可知,飛行器的前端和后端是外形改變劇烈的地方,在這里氣流方向產生變化,來流經機身頭部向上下兩側偏折流動,該區域正是駐點所在的位置;待流過飛行器后,在其尾部形成一個回流區,氣流流動方向與來流相反。該低速回流區會導致飛行器表面壓力載荷分布發生變化,尾部流場環境相對復雜,對機體的氣動特性可能會帶來不利影響,整個流場特征與鈍頭體流場結構相似[13]。由于類Clipper 升力體式再入返回器需要借助降落傘系統來進行減速著陸,開傘通道位置的布置應盡量遠離該區域,以避免受尾流的作用影響[14]。
圖8 飛行器對稱截面速度分布云圖和流線分布Fig.8 Velocity contours and streamline distribution of the symmetrical section of the Clipper-like capsule
不同流場條件下的類Clipper 再入返回飛行器氣動力變化規律如圖9 所示。計算結果表明:在不同高度和不同飛行馬赫數下,飛行器的升力系數(cl)在α=±15°內均能呈現良好的線性變化,具有一定的正負對稱性,最大升力系數可達0.65 左右;阻力系數(cd)在α=±15°內關于α=0°對稱,大小介于0.4~1.0 之間;同時在α=±15°內,升阻比(cl/cd)在中低空能夠達到1.10,在高空飛行(稀薄氣體)時升阻比能夠達到0.52,屬于中等升阻比再入[15],且在α=15°內仍未達到最大升阻比。計算還表明,雖然在不同高度和不同馬赫數流場條件下,再入返回飛行器的氣動力變化規律比較一致,但相同高度、相同攻角下,馬赫數對飛行器升力系數的影響較小,對阻力系數的影響較大。再入返回飛行器處于不同高度時,升力系數無明顯變化,但高空飛行時阻力系數整體相對中低空而言會增大30%以上。
圖9 不同流場條件下的氣動力變化Fig.9 Aerodynamic changes in different flow fields
3 再入返回器飛行穩定性分析
在已知再入返回器質量分布特性的前提下,本章結合不同飛行狀態下的壓心位置給出了該飛行器在不同飛行高度、馬赫數以及攻角下的靜穩定度(τ)變化關系。靜穩定度[16]關系式如下:
式中:xf為壓心系數;xg為質心。
在不同高度和不同馬赫數下,類Clipper 再入返回器靜穩定度隨攻角的變化規律一致,如圖10所示。由圖可知,該飛行器在正攻角狀態下飛行時始終保持靜穩定,當以較小負攻角飛行時會呈現出靜不穩定性,當飛行攻角繼續減小時又變成靜穩定性。因此,類Clipper 再入返回器總體呈現良好的靜穩定性。進一步分析發現,低空飛行時飛行器的靜穩定的程度較低,馬赫數對靜穩定度的影響較小。
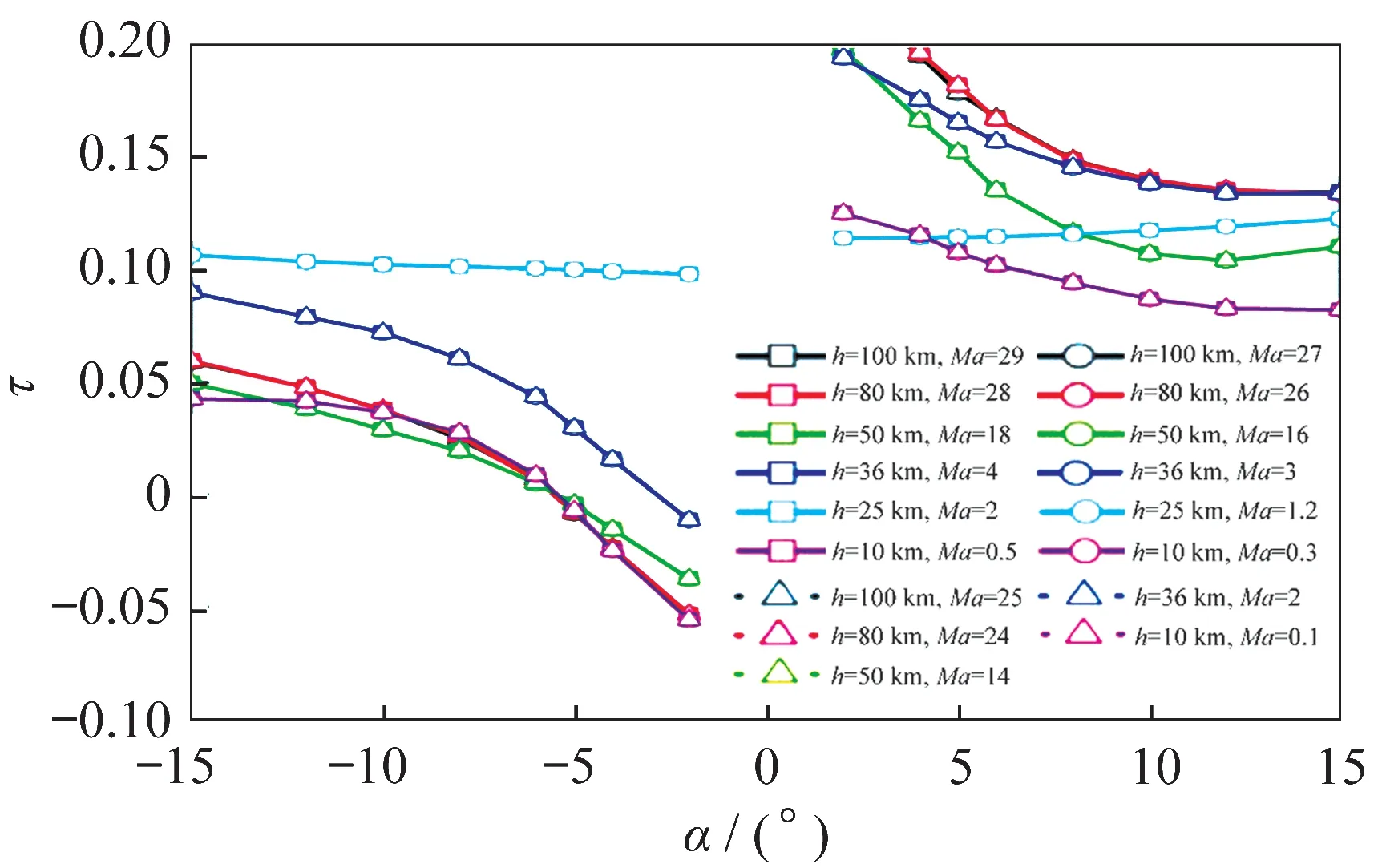
圖10 不同飛行高度、Ma、攻角下的靜穩定度變化關系Fig.10 Variations of static stability at different flight heights,Ma,and angles of attack
模擬了不同攻角擾動下、不同高度時的響應輸出,見表3。

表3 攻角擾動輸入條件Tab.3 Disturbance input conditions of the angle of attack
根據以上對再入返回器氣動特性CFD 計算結果的分析,采用仿真驗證該飛行器的縱向靜穩定性[17],如圖11 所示。

圖11 攻角時間歷程Fig.11 Time history of the angle of attack
從攻角時間歷程上來看,類Clipper 再入返回器在飛行過程中能夠保持縱向穩定,在不同高度下,飛行攻角因受到突然擾動而改變時,在不施加任何操縱控制的情況下,該飛行器都能夠在一定時間內迅速收斂到配平攻角(約23°)。
4 結束語
針對升力體式再入返回飛行器的氣動特性進行了研究,參考Clipper 飛船返回艙的外形,利用形狀控制函數,給出了一種類Clipper 升力體飛行器氣動外形,并基于高效的CFD 方法開展了再入返回過程中不同高度、不同馬赫數和不同迎角下的全空域/速域飛行器氣動特性研究,進一步分析了該飛行器的靜穩定性,得到如下結論:
1)類Clipper 再入返回飛行器具有良好的升阻力特性,氣動效率高,最大升阻比能夠達到1.1 以上,屬于中等升阻比再入;
2)類Clipper 再入返回飛行器在正攻角狀態下飛行時始終保持靜穩定,當以較小負攻角飛行時會呈現出靜不穩定性;
3)類Clipper 再入返回飛行器在不同高度下飛行攻角因受到突然擾動而改變時,能夠在不施加任何操縱控制的情況下保持縱向穩定;
4)類Clipper 再入返回飛行器具有升阻比高、穩定性好、機動性強的特點,可在未來作為具有可重復使用再入返回飛行器的選擇方案。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19