基于組合賦權的車輛智能換道避障功能模糊綜合評價
2023-03-15 02:57:28李文亮張學文劉智超
公路交通科技 2023年1期
戰(zhàn) 琦,周 煒,李文亮,張學文, 2,劉智超
(1. 交通運輸部公路科學研究所,北京 100088;2. 東南大學,江蘇 南京 210000)
0 引言
無人駕駛車輛在完成功能開發(fā)與驗證后,形成了較為完整的系統(tǒng),功能也趨于完善。接著需要對其進行測試與評價,目的是通過測試獲得車輛的表現(xiàn),進而對其各項功能進行評估,以幫助開發(fā)人員發(fā)現(xiàn)功能的不足或缺陷,有針對性地予以完善[1]。智能避障功能作為無人駕駛車輛安全駕駛的核心功能之一,在保障乘員安全、減少交通事故和提高通行效率方面起到了至關重要的作用。目前針對智能避障功能測試與評價階段的研究仍處于起步階段,評價方法存在評價指標體系不完善、評價過程主觀意識過強、評價結果不科學等問題,因此本研究針對車輛智能避障功能綜合評價開展研究。
按照車輛避障動作,將不停車避障分為換道避障和借道避障兩種場景。換道避障是指車輛變換車道躲避障礙物,此時影響車輛行駛的障礙物占用過多當前行駛車道,車輛不得不換道才能保證與障礙物的安全距離。借道避障是指車輛借用部分相鄰車道,微調(diào)行駛方向躲避障礙物,此時影響車輛行駛的障礙物占用部分車道,安全避障后車輛仍需返回原車道。本研究首先針對車輛智能換道避障功能綜合評價開展研究。
綜合評價的前提是構建評價指標體系,評價指標的選取應遵循系統(tǒng)性、可行性、科學性等原則,目前對無人駕駛車輛評價指標體系的研究大都針對車輛整體,某項具體功能僅作為其中一項定性指標。綜合評價的核心是通過合適的評價方法確定評價對象在各指標上的評價結果,該過程主要包含計算指標權重和建立綜合評價模型。計算權重的方法按原始數(shù)據(jù)的來源可以分為主觀賦權法、客觀賦權法和主客觀結合的組合賦權法3類[2]。主觀賦權法根據(jù)相應領域?qū)<业闹R和經(jīng)驗,對評價指標的重要程度進行兩兩比較、賦值和計算來確定權重,如層次分析法(Analytical Hierarchy Process,AHP)[3]、專家調(diào)查(Delphi)法[4]、序關系分析(G1)法[5]等,主觀權重會具有很強的主觀性。客觀賦權法根據(jù)指標初始數(shù)據(jù)之間的數(shù)量關系,采用一定的數(shù)學方法計算權重,如主成分分析法[6]、因子分析法[7]、熵值法[8]、CRITIC法[9]等,如果實測數(shù)據(jù)不具有典型性和普遍性,可能存在權重分配不合理的情況。組合賦權法根據(jù)不同的偏好系數(shù)將主、客觀賦權法求得的權重結合起來,既保留主觀賦權法中對專家經(jīng)驗知識與決策者主觀意向的信息體現(xiàn),也保留客觀賦權法中對指標與評價對象間內(nèi)在聯(lián)系的信息表現(xiàn),具有優(yōu)勢互補的效果,得到的評價結果相對更加科學、合理。建立綜合評價模型則將多個評價指標屬性值“合成”為一個整體的綜合評價值,主要方法包括灰色關聯(lián)度法[10]、TOPSIS(Technique for Order Preference by Similarity to an Ideal Solution)法[11]、BP(Back Propagation)神經(jīng)網(wǎng)絡[12]和模糊綜合評價法[13]等。
在車輛智能評價方面,Sun[14]從安全性、智能性、平順性3方面構建評價指標體系,基于拓展層次分析法(EAHP,extension analytic hierarchy process)求取權重,并通過灰色關聯(lián)分析對無人駕駛車輛的智能行為進行綜合量化評價,但受專家主觀性影響且需要一致性檢驗。Zhao[15]基于十字路口、跟車等典型工況建立評價指標體系,通過熵-成本函數(shù)方法進行評價,雖然排除了主觀因素影響,但過于依賴實測數(shù)據(jù)且不具備普適性。Huang[16]則通過層次分析法-熵值法和模糊綜合評價對無人駕駛車輛的整體性能進行評價,為避免層次分析法計算復雜且存在一致性檢驗不通過的可能,李茹[17]分析中國智能車未來挑戰(zhàn)賽的測試內(nèi)容,從安全性、系統(tǒng)性、平穩(wěn)性和速度性4方面構建評價指標體系,基于G1法和熵值法求取權重,通過模糊綜合評價法對自動駕駛車輛進行綜合智能定量評價。但G1法存在指標重要程度比值固定的問題,熵值法則忽略了指標之間的內(nèi)在聯(lián)系。CRITIC法相比于熵值法考慮了評價指標的沖突性和對比程度,已在其他綜合評價領域有較好的應用,例如電網(wǎng)[18]、礦業(yè)[19]等。
無人駕駛車輛正處于發(fā)展階段,在功能評價過程中不能過度依賴專家主觀意愿,也不能完全依據(jù)指標的實測數(shù)據(jù)。為避免評價方法中存在主、客觀因素的單一影響,并對車輛智能換道避障功能進行科學評價,首先結合智能換道避障過程階段及其測試工況,建立評價指標體系,接著基于改進G1法和CRITIC法求取組合權重,并通過模糊綜合評價法建立評價模型,對車輛智能換道避障功能進行綜合評價,為其功能的進一步發(fā)展提供依據(jù)。
1 車輛智能換道避障功能綜合評價
1.1 智能換道避障功能評價指標體系
按照測試環(huán)境與外界交通要素的交互程度和測試風險程度,測試由低到高分為封閉環(huán)境規(guī)范性測試(C1)、封閉環(huán)境驗證性測試(C2)、有限開放環(huán)境驗證性測試(C3)、開放環(huán)境示范性驗證(C4)4個階段[20]。封閉環(huán)境規(guī)范性測試階段不允許其他車輛及相關要素出入,在專用封閉環(huán)境進行測試,該階段測試工況確定,測試方法、手段及結果具有重復性。本研究針對交互程度和測試風險程度較低的封閉環(huán)境規(guī)范性測試開展研究。車輛智能換道避障測試工況分為直道換道避障和彎道換道避障兩類。測試設備要求測得試驗車輛的速度精度為±0.1 km/h,橫向加速度精度為±0.15 m/s2。試驗路面要求壓實并且無可能造成傳感器異常工作的不規(guī)則物,路面干燥、無可見水分、平整、用瀝青或混凝土鋪裝,應具備清晰可見且符合《GB5768.3道路交通標志和標線》要求的標志和標線,坡度不應大于6%。試驗環(huán)境應符合天氣干燥,沒有降雨、降雪等情況;試驗溫度位于5~45 ℃之間;水平方向上的能見度不低于1 km;平均風速應不大于3 m/s。車輛應在制造商規(guī)定的載荷狀態(tài)下進行試驗,試驗開始后不對車輛載荷進行任何調(diào)整。
(1)直道換道避障
試驗道路至少為一條單向雙車道的長直道,試驗車輛以試驗車速沿著符合試驗路面要求的道路行駛。當車輛識別到本車道前方障礙物,并確定相鄰車道滿足換道條件時,執(zhí)行換道避障動作。該測試工況示意圖如圖1所示。
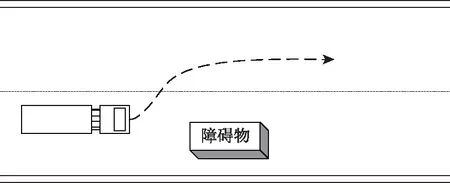
圖1 直道智能換道避障測試工況示意圖Fig.1 Schematic diagram of test condition of intelligent obstacle avoidance by lane changing in straight lane
(2)彎道換道避障
試驗道路至少為一條曲率半徑為500 m的單向雙車彎道,試驗車輛以試驗車速沿著符合試驗路面要求的道路行駛。當車輛識別到本車道前方障礙物,并確定相鄰車道滿足換道條件時,執(zhí)行換道避障動作。彎道換道避障分為與彎道同向換道避障和與彎道反向換道避障,以左彎道為例,同向是指向左換道避障,如圖2(a)所示,反向是指向右換道避障,如圖2(b)所示。
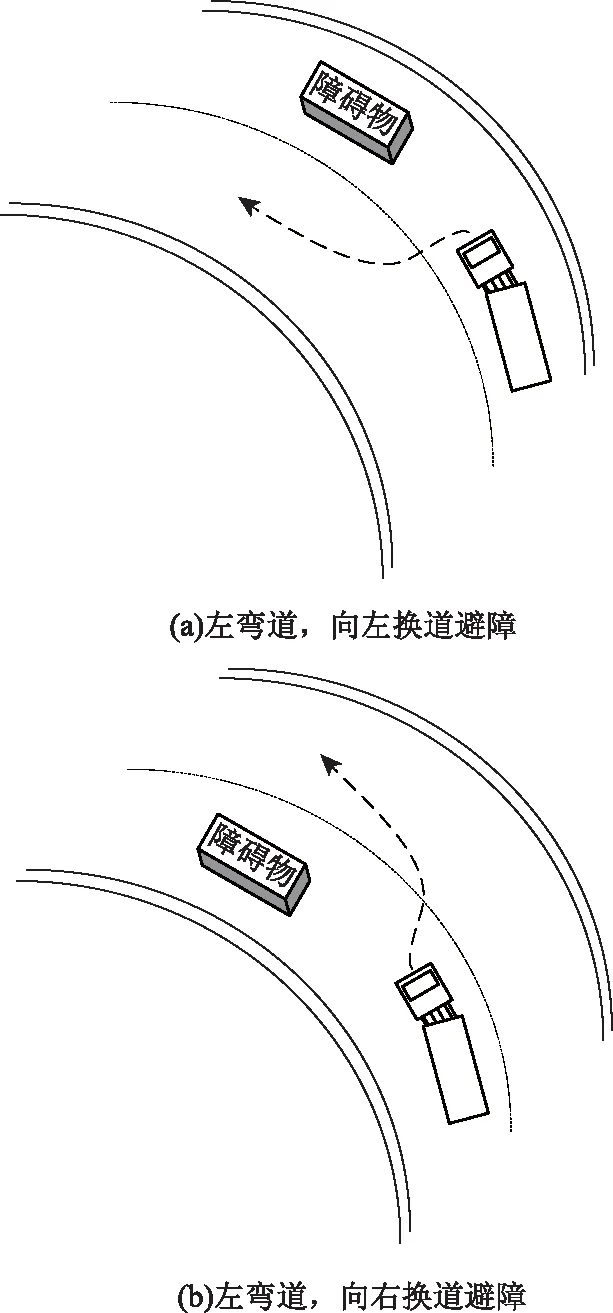
圖2 彎道智能換道避障測試工況示意圖Fig.2 Schematic diagram of test condition of intelligent obstacle avoidance by lane changing in curved lane
換道避障過程是指從轉(zhuǎn)向燈開啟至車輛完成換道避開障礙物且轉(zhuǎn)向燈熄滅的過程。換道避障準備階段是指轉(zhuǎn)向燈開啟至前輪外側(cè)接觸到即將跨越車道線的內(nèi)邊沿的階段。換道避障執(zhí)行階段是指車輛前輪外側(cè)接觸到即將跨越車道線的內(nèi)邊沿至車輛后輪完全跨過車道線。換道避障完成階段是指車輛進入目標車道,完成換道動作安全避開障礙物,并在當前車道穩(wěn)定行駛30 m以上。基于車輛智能換道避障過程的不同階段及其測試工況,評價指標則選取了與車輛智能換道避障功能相關的具體參數(shù),建立了如表1所示的車輛智能換道避障功能評價指標體系。該評價指標體系包括2個1級指標,即直道換道避障工況和彎道換道避障工況,彎道換道避障工況又分為與彎道同向換道避障和與彎道反向換道避障;每個1級指標下各包括5個2級指標,即換道避障動作流暢性、最大橫向加速度、平均橫向加速度、換道避障準備時間、換道避障全程時間。
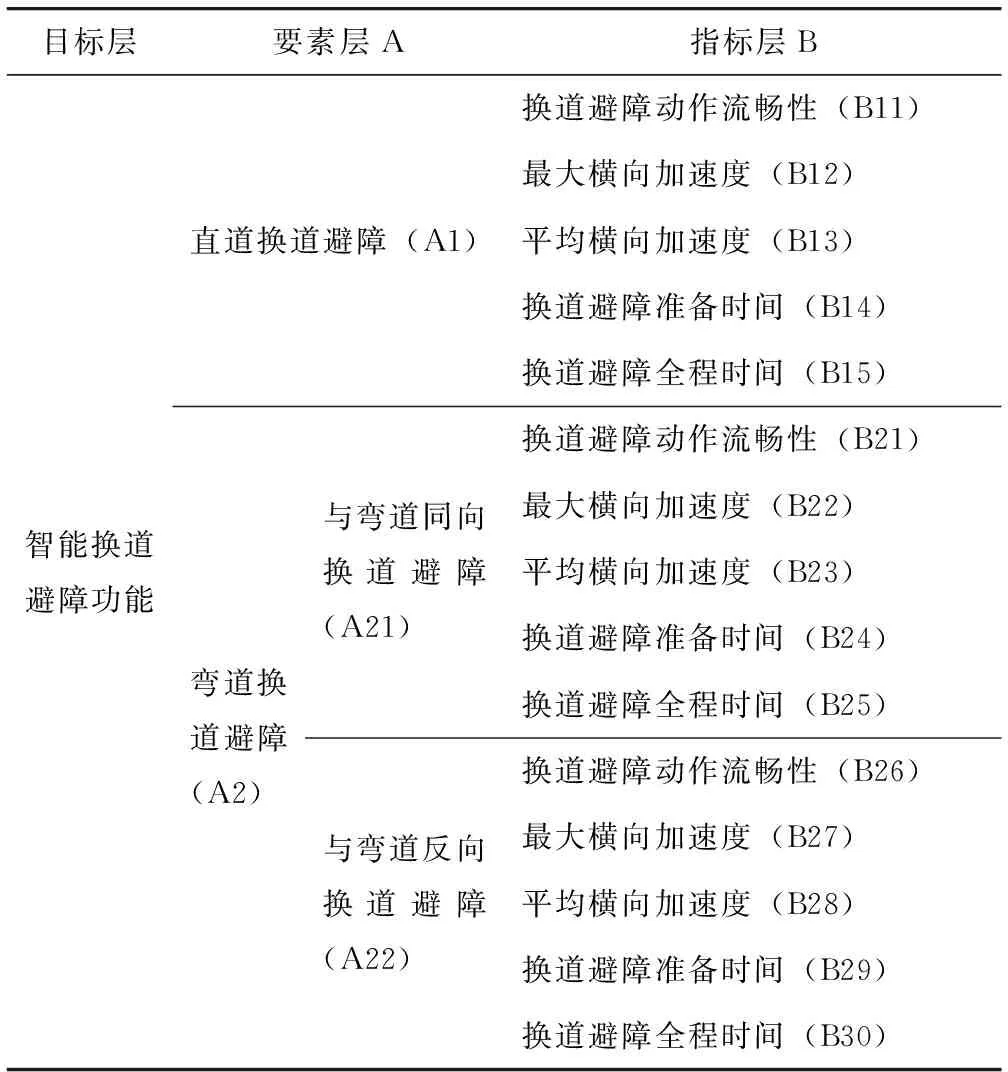
表1 車輛智能換道避障功能評價指標體系Tab.1 Evaluation indicator system of vehicle intelligent obstacle avoidance function by lane changing
其中,換道避障動作流暢性為定性指標,由試驗人員根據(jù)車輛在試驗中的表現(xiàn)打分,滿分10分,若車輛在換道避障過程中不存在間隔延遲,換道動作是連續(xù)的,且安全避障,則得10分;若車輛出現(xiàn)1次間隔延遲,則按照時延扣分,每1 s扣1分,時延小于1 s的按照1 s扣分;若車輛出現(xiàn)超過1次間隔延遲或與障礙物發(fā)生碰撞,則得0分。最大橫向加速度和平均橫向加速度對換道避障執(zhí)行階段的平順性、安全性進行評價,平均橫向加速度指加速度絕對值對時間積分后除以時間長度。換道避障準備時間、換道避障全程時間分別對換道避障準備階段和全過程的效率進行評價。
1.2 基于組合賦權的模糊綜合評價方法
1.2.1 改進G1法
改進G1法采用專家打分的形式避免原方法存在的指標重要程度比較值固定的問題,具體包含以下步驟。
(1)確定指標之間的序關系
邀請專家對指標的重要程度打分,分值為1~10分,指標XR的重要程度分數(shù)用Xk表示打分標準參考表2。根據(jù)專家給出的重要程度分數(shù),將每一層級的指標集{X1,X2,X3,…,Xm}重新排序。若指標Xi的得分高于指標Xj,則說明指標Xi相對于指標Xj重要,記為Xi>Xj,依此得到序關系。
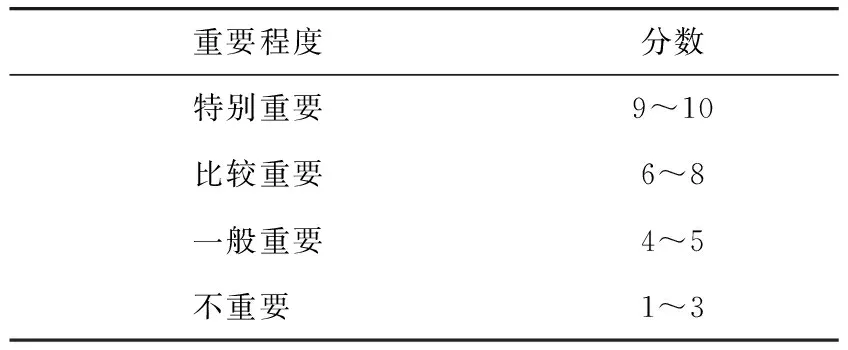
表2 專家打分標準Tab.2 Expert scoring criteria
(2)相鄰指標重要程度比值
以某位專家的打分情況為例,將相鄰指標的重要程度分數(shù)之比作為兩指標的權重之比,如式(1)所示:
(1)
式中,m為對應層次的指標數(shù)量;pk為相鄰指標的權重之比;wsk為指標Xk基于某位專家打分得到的主觀權重。
(3)計算主觀權重
基于該專家打分的主觀權重wsk的計算如式(2)所示:
(2)
根據(jù)遞推關系可求得其他指標的主觀權重,如式(3)所示:
ws(k-1)=pkwsk(k=m,m-1,…,2)。
(3)
得到基于該專家打分的各指標的主觀權重wsk={ws1,ws2.ws3,…,wsm}。
最后對各位專家打分求取的權重求均值,得到最終權重。
1.2.2 CRITIC法
CRITIC法相比于熵值法考慮了評價指標的沖突性和對比程度[21],即通過計算評價指標的標準差與相關系數(shù)確定權重,具體包含以下步驟。
(1)無量綱化處理
由于評價指標單位不同,且在評價過程中會出現(xiàn)正向指標和負向指標,需要進行無量綱化處理,對于指標值越高越好的正向指標采用式(4)進行處理,對于指標值越低越好的負向指標采用式(5)進行處理。
(4)
(5)
式中,Xik為指標Xk第i個原始實測數(shù)據(jù);xik為Xik無量綱化處理后的數(shù)據(jù)。
(2)計算各指標標準差
(6)

(3)構建相關系數(shù)矩陣

(7)
(4)計算各指標信息量
各指標的信息量Ck計算如式(8)所示:
(8)
式中,Ck為指標Xk所包含的信息量。信息量越大,該指標在整個評價指標體系中的作用越大,權重則越大。
(5)計算客觀權重
客觀權重的wok計算如式(9)所示。經(jīng)計算得到各指標的客觀權重wok={wo1,wo2,wo3,…,wom}。
(9)
1.2.3 組合賦權
得到主觀權重wsk和客觀權重wok后,根據(jù)乘法合成歸一法,如式(10)所示,計算得到組合權重Wk={W1,W2,…,Wm}。
(10)
1.2.4 模糊綜合評價
模糊綜合評價法[22]根據(jù)數(shù)學模型的隸屬度理論,將定性分析轉(zhuǎn)化為定量分析,具體步驟如下:
(1)建立模糊集合
首先確定評價對象的因素集U={u1,u2,…,um},即該層次有m個評價指標。
其次建立綜合評價的評價集V={v1,v2,…,vl},即對每一個指標所處狀態(tài)的l種評價。評價集是評價者對評價對象可能做出的評價結果的合集,也就是評價等級。
(2)確定相對隸屬度矩陣
將n個評價對象、m個評價指標的實測數(shù)據(jù),進行無量綱化處理,正向指標以原始數(shù)據(jù)除以最大值,負向指標以最小值除以原始數(shù)據(jù),得到相對隸屬度矩陣R,如式(11)所示:
(11)
(3)模糊綜合評價
將組合權重集Wk={W1,W2,…,Wm}與相對隸屬度矩陣R合成,得到各指標的模糊綜合評價模型E,如式(12)所示:
E=Wk·R=(W1,W2,…,Wm)
(12)
百分制下的綜合得分S由S=100E計算得到。
2 綜合評價方法在車輛智能換道避障中的應用
以兩臺不同廠家生產(chǎn)的重型卡車的試驗樣車C1,C2為例,應用車輛智能換道避障功能評價指標體系和基于組合賦權的模糊綜合評價方法對其功能進行評價。兩車的試驗車速均為60 km/h,天氣干燥,沒有降雨、降雪等情況,試驗溫度20 ℃,水平方向上的能見度不低于1 km,風速0.8 m/s,已獲得兩車在直道換道避障工況、左彎道向左換道避障工況和左彎道向右換道避障工況的各評價指標的測試數(shù)據(jù)。兩臺試驗樣車在3種工況下均安全避開障礙物,C1的最大橫向加速度、平均橫向加速度、換道避障準備時間均大于C2,C2的換道避障全程時間長于C1。C1,C2在與彎道同向測試工況中的最大橫向加速度和平均橫向加速度最大,在與彎道反向測試工況中準備時間最長,在直道測試工況中全程時間最長。
2.1 改進G1法計算主觀權重
邀請3位道路運輸車輛技術領域相關專家,根據(jù)各自的知識、經(jīng)驗、打分標準對車輛智能換道避障功能各項指標的重要程度進行打分,按照改進G1法,經(jīng)式(1)~(3)計算得到各指標的主觀權重如表3所示。綜合3位專家的打分,由上至下各層的重要程度由重到輕排序如下:直道換道避障、彎道換道避障;與彎道同向、與彎道反向;換道避障全程時間、換道避障準備時間、最大橫向加速度、換道避障動作流暢性、平均橫向加速度;換道避障全程時間、換道避障準備時間、最大橫向加速度、平均橫向加速度、換道避障動作流暢性;換道避障全程時間、最大橫向加速度、換道避障準備時間、平均橫向加速度、換道避障動作流暢性。
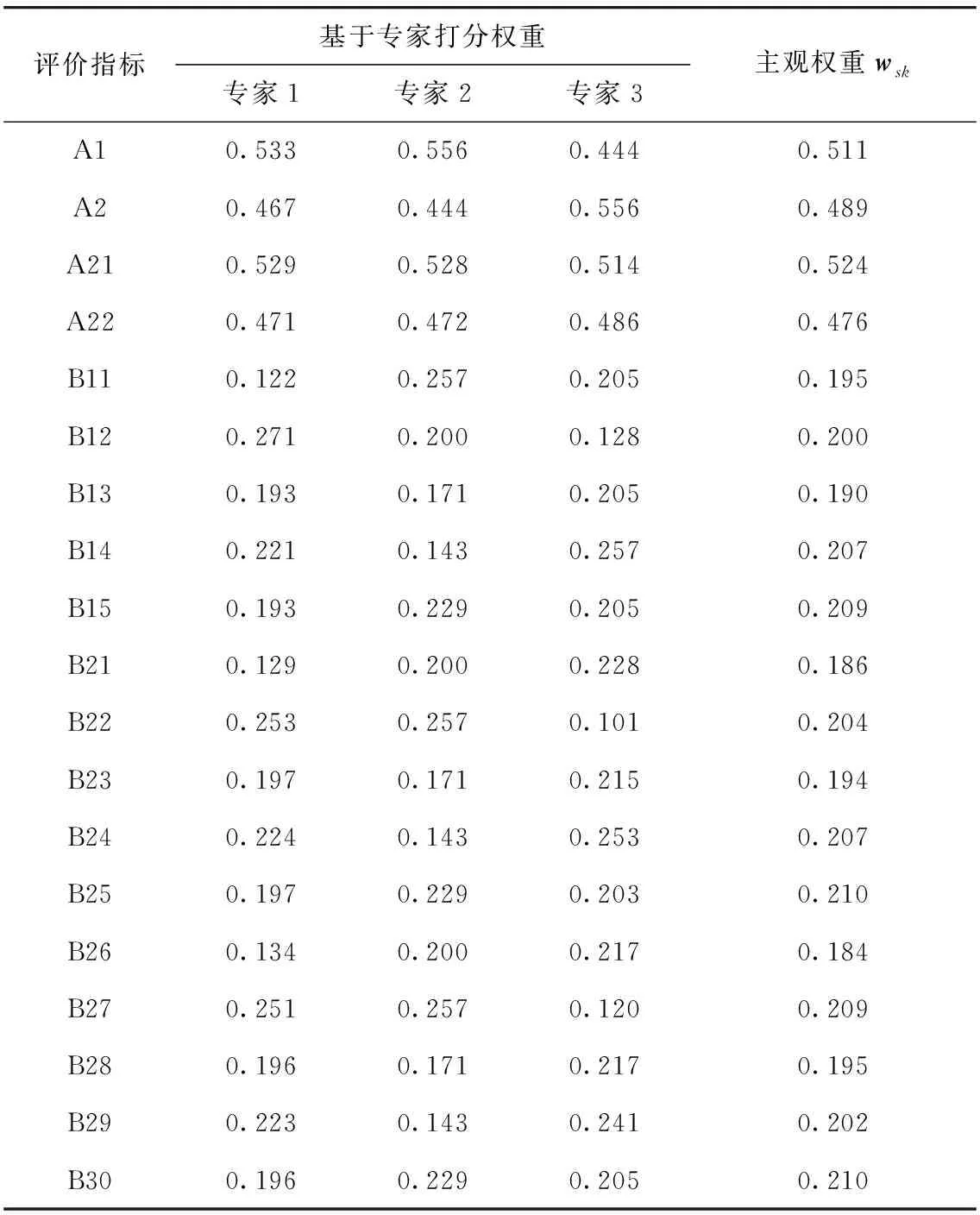
表3 基于改進G1法的車輛智能換道避障功能各評價指標主觀權重Tab.3 Subjective weights of each evaluation indicator of vehicle intelligent obstacle avoidance function by lane changing based on improved G1 method
2.2 CRITIC法計算客觀權重
將原始測試數(shù)據(jù)進行無量綱化處理。其中換道避障動作流暢性為正向指標,按照式(4)進行處理;最大橫向加速度、平均橫向加速度、換道避障準備時間、全程時間為負向指標,按照式(5)進行處理。最后得到3種測試工況下的標準化矩陣分別如式(13)~(15)所示。
(13)
(14)
(15)
在Python中,按照CRITIC法,經(jīng)式(6)~(9)計算求取各指標客觀權重如表4所示。
2.3 組合權重
根據(jù)式(8),計算出本實例中各指標組合權重如表4所示。
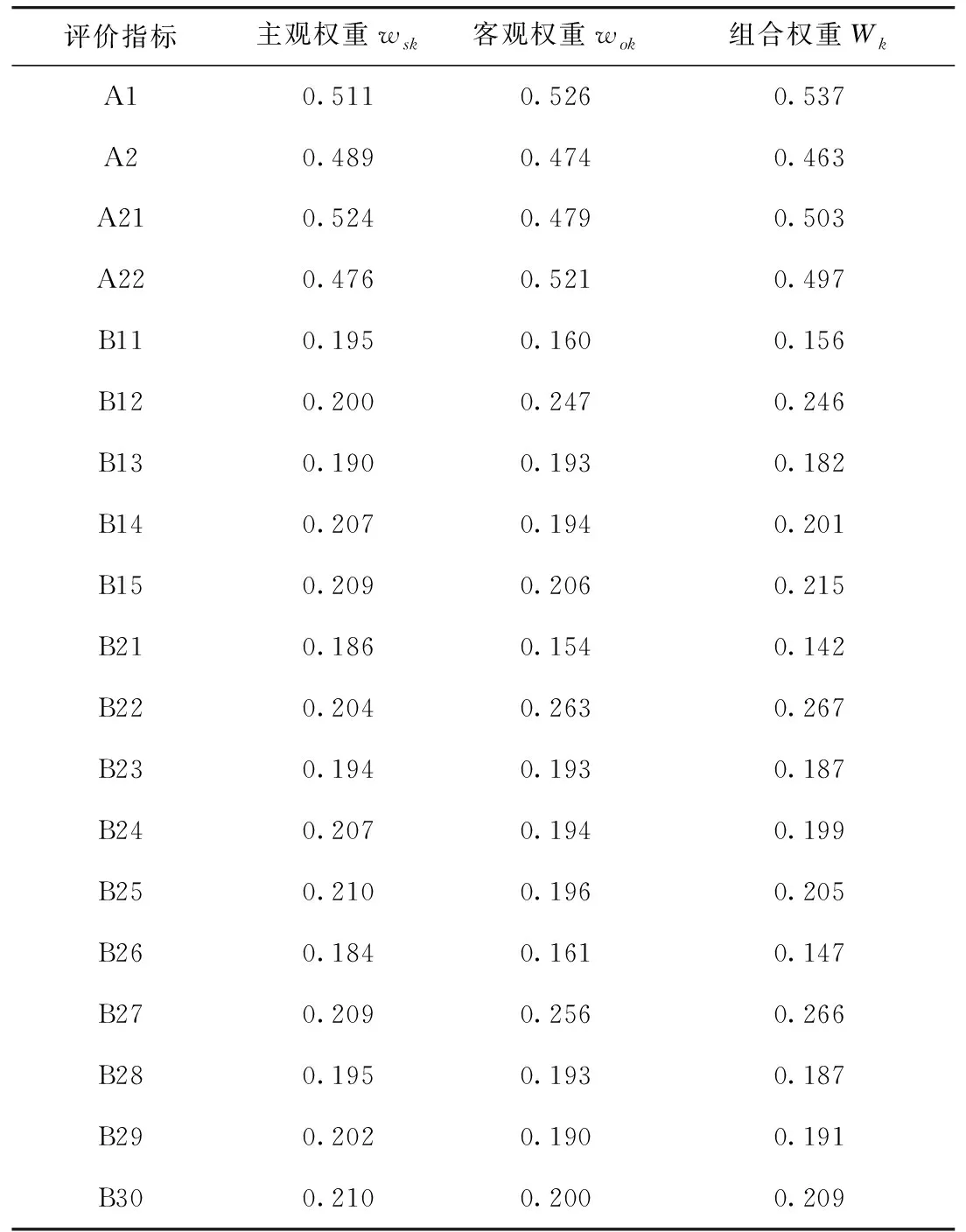
表4 基于組合賦權法的車輛智能換道避障功能各評價指標權重Tab.4 Weights of each evaluation indicator of vehicle intelligent obstacle avoidance function by lane changing based on combination weighing method
2.4 模糊綜合評價
從指標層開始逐層向上評價,以“直道換道避障”要素層的指標層為例。“直道換道避障”要素層的指標層共有5項評價指標,因素集U={u11,u12,u13,u14,u15},以“優(yōu)秀,良好,一般,合格,不合格”作為評價集的元素,評價集V={v1,v2,v3,v4,v5},評價等級劃分情況如表5所示。若得分低于60分,則評價對象被評為“不合格”,該車輛不具備智能換道避障功能,不能安全躲避障礙物;若得分高于60分,則評價對象具備智能換道避障功能,并將得分按10分為一個區(qū)間劃分為4個等級,得分由低到高分別為“合格”“一般”“良好”“優(yōu)秀”,得分越高,車輛該功能表現(xiàn)越好。
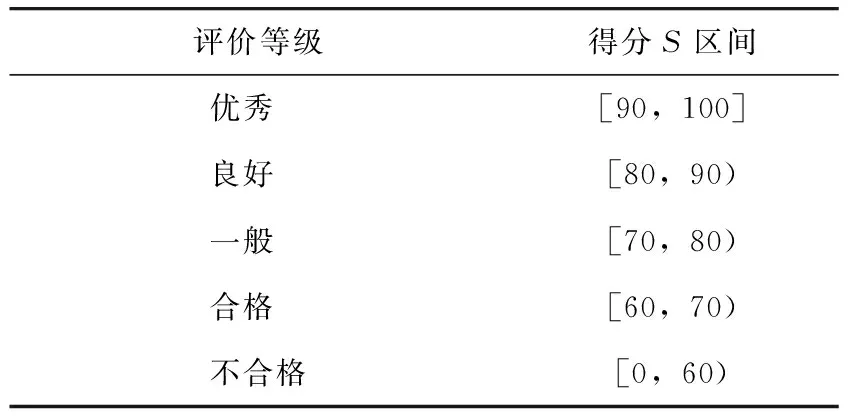
表5 評價等級劃分Tab.5 Evaluation level classification
將兩臺樣車的測試數(shù)據(jù)及各指標的限值作為原始數(shù)據(jù)矩陣,第1,2列分別為兩臺樣車的指標測試數(shù)據(jù),第3列為指標限值,進行無量綱化處理后,得到相對隸屬度矩陣RA1,如式(16)所示。
(16)
按照式(12),得到該層級的綜合評價結果,如式(17)所示:
EA1=WA1RA1=(0.156,0.246,0.182,0.201,0.215)
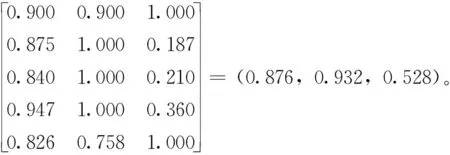
(17)
同理,可以得到其他層次的評價結果,“與彎道同向換道避障”“與彎道反向換道避障”“彎道換道避障”“智能換道避障功能”的評價結果分別如式(18)~(21)所示:
EA21=WA21RA21=(0.143,0.267,0.187,0.199,0.205)
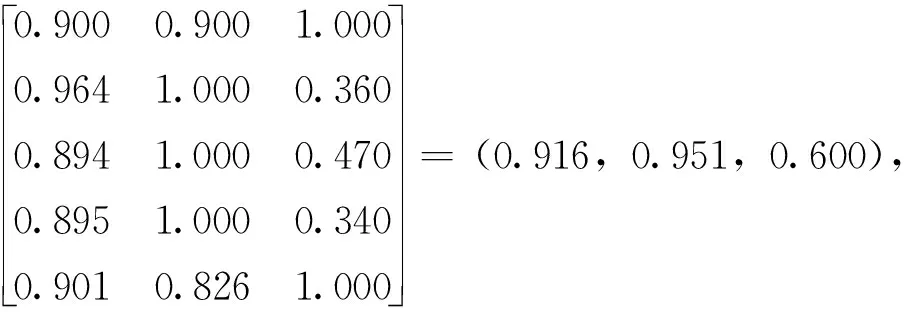
(18)
EA22=WA22RA22=(0.147,0.266,0.187,0.191,0.209)
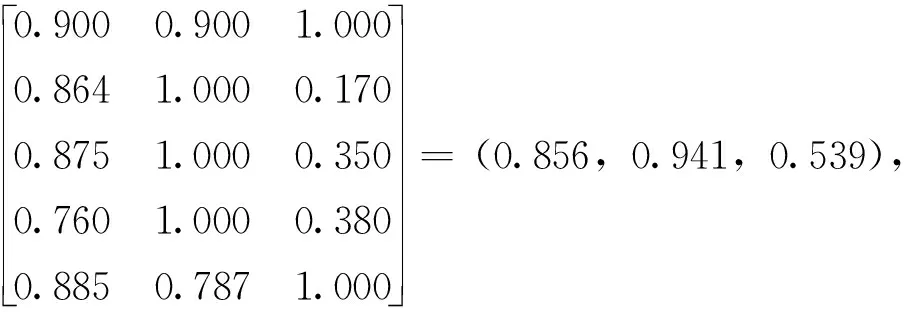
(19)
EA2=WA2RA2=(0.503,0.497)

(20)
E=WR=(0.537,0.463)

(21)
3 評價結果分析
基于上述綜合評價方法,得到C1,C2兩臺測試車輛的綜合評價結果如表6所示。評價結果可以直觀地看到兩臺車在不同工況下的測試結果,兩車均具有智能換道避障功能,能夠在不同工況下識別前方影響通行的障礙物,并實現(xiàn)安全換道避障。C2的各項測試工況得分均大于90分,明顯優(yōu)于C1,評價結果為優(yōu)秀,說明C2的智能換道避障功能表現(xiàn)比C1好。C1僅在與彎道同向換道避障工況中表現(xiàn)優(yōu)秀,其他工況表現(xiàn)良好,其中與彎道反向換道避障工況得分最低,需要繼續(xù)針對直道和與彎道反向測試工況的表現(xiàn),對智能避障功能進行相應改進。C2在直道工況下得分最低,說明相比于彎道工況,C2在直道工況下的表現(xiàn)稍差。
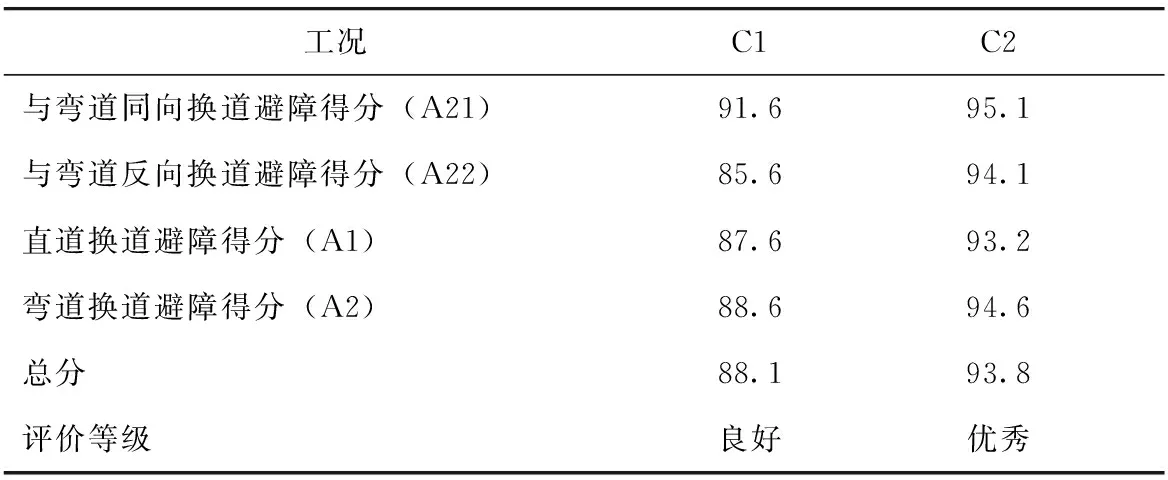
表6 C1,C2智能換道避障測試綜合評價結果Tab.6 Comprehensive evaluation result of intelligent obstacle avoidance function by lane changing test on C1 and C2
基于組合賦權的模糊綜合評價法對車輛智能換道避障功能進行綜合評價,得到的綜合評價結果與實際測試結論相符。結合實測數(shù)據(jù)和各指標權重可以發(fā)現(xiàn),C2在換道避障時所用全程時間相比于C1較長,但由于權重未占很高的比重,故沒有影響最終評價結果。C1雖然在與彎道同向換道避障工況中得分較高,但由于彎道工況權重小,且其他工況得分低,故總分仍舊較低。指標層的所有指標中,最大橫向加速度權重最高,說明了在智能換道避障過程中平順性的重要程度,車輛應使橫向加速度保持較小值,進而保證車輛的平順性。
4 結論
為了對無人駕駛車輛的智能換道避障功能進行綜合評價,按測試工況分類,首先構建了車輛智能換道避障功能評價指標體系,接著基于改進G1法和CRITIC法,通過乘法合成歸一求取組合權重,并建立模糊綜合評價模型。最后,以兩臺智能營運車輛在3種工況下的測試數(shù)據(jù)進行驗證。結果表明,基于組合賦權的模糊綜合評價方法可以為車輛智能換道避障功能提供全面、科學、合理的評價結果,與單一賦權方法相比,既減少了專家經(jīng)驗的強主觀性影響,又防止了客觀數(shù)據(jù)脫離實際的可能性,評價結果可以為車輛智能換道避障功能的改進提供依據(jù)。
后續(xù)還需要進一步研究車輛智能借道避障綜合評價方法,與智能換道避障綜合評價方法形成針對車輛智能避障功能的綜合評價方法;隨著車輛智能技術的不斷發(fā)展,測試工況和指標仍需要進一步研究,提升綜合評價方法的全面性。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
石油瀝青(2021年4期)2021-10-14 08:50:44
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國科技論壇(2017年7期)2017-07-25 08:49:53
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國中醫(yī)藥現(xiàn)代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫(yī)藥現(xiàn)代遠程教育(2014年16期)2014-03-01 04:28:54