面向艦船綜合電力系統的10 kV/2 MW 模塊化多電平雙向直流變換器控制策略
2023-03-04 06:56:58劉計龍朱志超黃兆捷
電工技術學報 2023年4期
劉計龍 陳 鵬,2 肖 飛 朱志超 黃兆捷
(1.海軍工程大學艦船綜合電力技術國防科技重點實驗室 武漢 430033 2.東南大學電氣工程學院 南京 210096)
0 引言
艦船綜合電力系統是發展海上艦船的突破性技術,其以電能作為統一的形式實現了全船能量的生產、輸運、變換、消納和存儲。1998 年馬偉明院士創新科研團隊率先提出發展基于中壓直流系統的二代艦船綜合電力系統(Integrated Power System,IPS)技術路線。與傳統的中壓交流系統相比,中壓直流系統功率密度更高、可靠性更好、功率控制更靈活、振動噪聲更小[1-3]。
中壓直流系統和儲能元件的引入是二代艦船IPS 的顯著特征。因此,二代艦船IPS 對變配電變換器提出了新的需求:①有更高的耐電壓能力,可以承受中壓直流母線的接入;②有雙向功率變換能力,可以實現中壓側與低壓側的雙向能量交互;③模塊化水平高,便于生產、制造與維護;④有較高的功率密度和運行效率,節省船上空間,可大大加強船只的續航能力。
目前在艦船直流配電領域研究最多的兩種中高壓拓撲是基于模塊化多電平變換器(Modular Multilevel Converter,MMC)的端對端結構[4-8]和模塊化多電平雙向直流變換器(Modular Multilevel Bidirectional DC-DC Converter,MMBDC)結構[9-11]。后者也可稱為基于 MMC 的輸入串聯輸出并聯(Input Series Output Parallel,ISOP)結構。文獻[7,12]比較了這兩種拓撲形式的優缺點并指出,基于MMC 的端對端結構由于基本單元形式更加簡單,冗余保護成本更低,容錯運行也更簡單。而與之相比,MMBDC 結構更加緊湊,功率密度更高,器件的電氣應力也更低。考慮到艦船可利用空間非常有限,本文主要針對MMBDC 結構開展研究。
目前已有較多關于MMBDC 的文獻發表,文獻提出了在直流多端口MMC 后級級聯不同類型的拓撲,如雙有源橋(Dual Active Bridge,DAB)等,來構成MMBDC 結構[9-11,13-15],也有部分文獻在MMC后級并聯多個低壓兩端口子變換器或低壓多端口子變換器來構成中高壓多端口MMBDC 結構[16-18]。上述文獻所采用的MMBDC 拓撲結構與主要研究內容見表1。可以看出,MMBDC 在直流配電領域擁有出色的應用潛力。
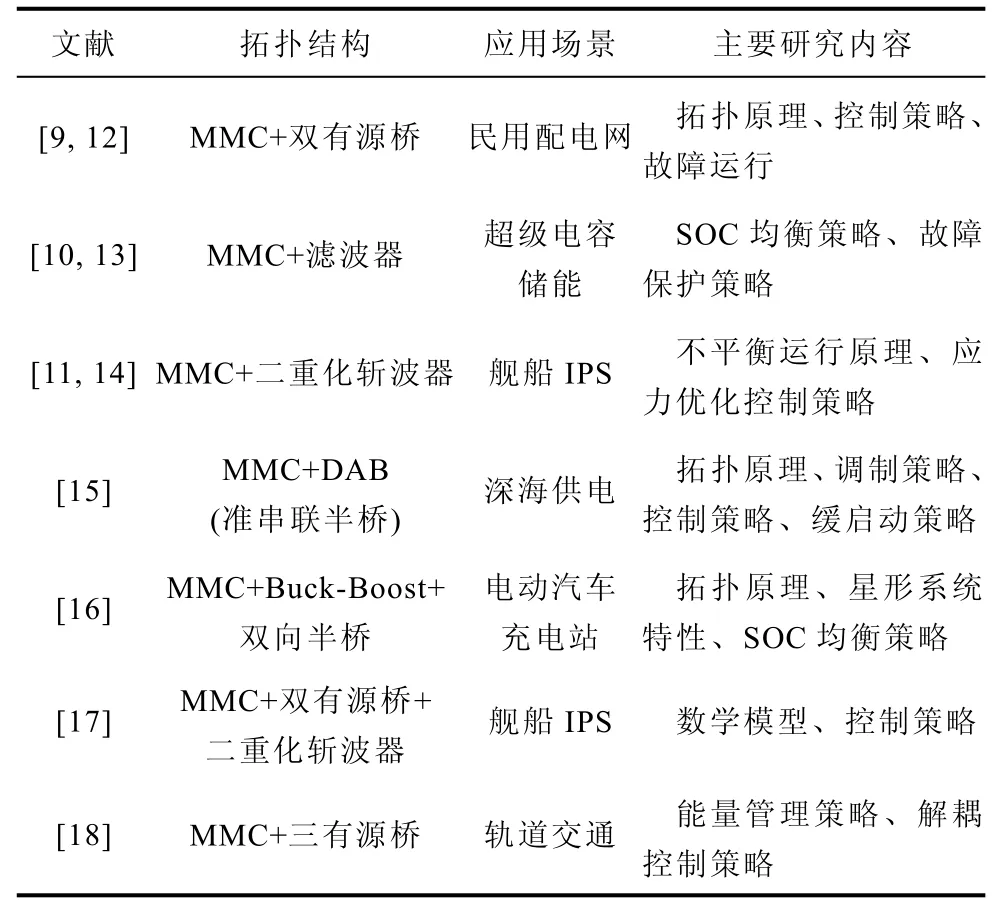
表1 MMBDC 文獻綜述Tab.1 Literature overview of MMBDC
文獻[9]針對MMBDC 的直流多端口MMC 子變換器提出一種平均電壓環與均壓環相結合的三環控制策略,使得變換器能夠在額定工況下穩定運行。然而,該策略控制變量采樣難、未直接控制中壓側電流、環路耦合強,且未考慮中壓側低頻振蕩問題。這些劣勢在中高壓大功率應用中尤為明顯。
對此,本文為直流多端口MMC 子變換器提出一種改進的三環解耦控制策略,該策略以中壓側電流作為平均電壓環內環控制量,便于對其進行限幅,防止中壓側過電流;通過陷波器抑制了中壓側電感與子模塊開關電容之間的低頻振蕩;實現了平均電壓環與均壓環的解耦。另一方面,針對低壓側連接儲能元件時DAB 的低頻諧振問題,本文提出了基于陷波器的雙向功率控制策略。此外,本文設計并制作了10 kV/2 MW 級MMBDC 工程樣機,通過滿功率實驗驗證了所提出的控制策略的有效性。
本文所提出的控制策略加強了MMBDC 的穩定性與可靠性,提高了裝置的控制性能,也簡化了控制參數設計過程。此外,本文的實驗平臺的設計可為其他同類型的中壓大功率電力電子變換裝置的設計和實現提供參考依據。
1 MMBDC 拓撲原理
1.1 基本拓撲
由N條支路構成的MMBDC 如圖1 所示,每條支路由MMC 子變換器的半橋子模塊(Half Bridge Sub-Module,HBSM)和DAB 子變換器級聯而成。
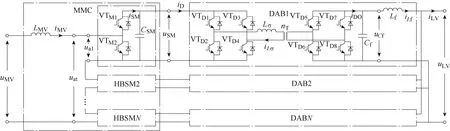
圖1 MMBDC 結構Fig.1 Topology of MMBDC
MMBDC 的硬件電路參數包括:支路數N、中壓側濾波電感LMV、子模塊電容CSM、變壓器電壓比nT、低壓側濾波電容Cf、低壓側濾波電感Lf。本文假設這些參數在各支路中是一致的。
MMBDC 的電氣參數包括:中壓側電壓uMV、中壓側電流iMV、子模塊電壓uSM、半橋子模塊斬波電流iSM、DAB 一次側輸入電流iD、變壓器一次側漏感電流iLσ、低壓側濾波電容電壓uCf、低壓側濾波電感電流iLf、低壓側電壓uLV和低壓側總輸出電流iLV。VTM1和VTM2分別為MMC 半橋子模塊的上管和下管IGBT,VTD1~VTD8為DAB 子變換器的IGBT。
與普通ISOP 結構相比,MMBDC 用直流多端口MMC 替代了輸入串聯結構,為后級提供了多路可調的直流電源。兩種子變換器MMC 和DAB 通過子模塊電容解耦,二者控制策略可以分開設計。
在直流配電應用中,MMBDC 有如下優勢:
(1)MMC 和DAB 子變換器均為雙向變換器,因此無論在中壓側或低壓側連接的是有源負載還是無源負載,MMBDC 都可以完成功率的雙向靈活傳輸。
(2)MMC 子變換器提供了不平衡運行能力[11]。因此可以在MMBDC 低壓側連接分布式儲能元件或無源負載,使MMBDC 運行在各支路功率不平衡的工況下。
(3)當部分支路發生故障時,可以持續導通對應子模塊的下管IGBT 以及輔助旁路開關即可將故障支路切除,而不影響其余支路的正常運行。
(4)MMBDC 避免了在中壓側采用集中式大電容,減小了中壓側短路電流沖擊,子模塊電容中存儲的電量也有利于故障后的快速重投[9]。
(5)MMC 子模塊電容可調,因此,可以使得DAB 始終運行在一次、二次電壓匹配的工況下,提高了運行效率。
MMC 子變換器采用移相調制策略[9,11],可以起到等效倍頻的效果,大大降低了中壓側電流紋波。由于子模塊電壓可調,一次、二次電壓匹配程度較好,DAB 子變換器采用單移相調制策略[19]。
1.2 數學模型
若忽略中壓側電感電流紋波和子模塊電容電壓紋波,可以建立MMC 子變換器狀態平均方程為
若采用均壓控制,認為各子模塊電壓和占空比一致,并忽略中壓側電感內阻,有
式(3)即為中壓側電流與子模塊電壓的函數關系。
設各支路占空比、負載電流及子模塊電壓的穩態值均相同,對式(1)分離小信號得到
式中,帶有上標“*”的變量為對應信號的穩態量;iDi為MMC 子模塊負載電流擾動。MMC 小信號狀態空間方程見附錄第1 節。
以半橋子模塊占空比到中壓側電流的開環傳遞函數GMDI為例進行分析,忽略中壓側電感內阻,GMDI表達式為
本文設計了10 kV/2 MW 級MMBDC 工程樣機的參數見表2(詳見3.1 節)。將表2 所示參數代入式(5)可知,特征方程的阻尼比很小,因此可以認為諧振頻率和無阻尼自然振蕩頻率近似一致,其表達式為
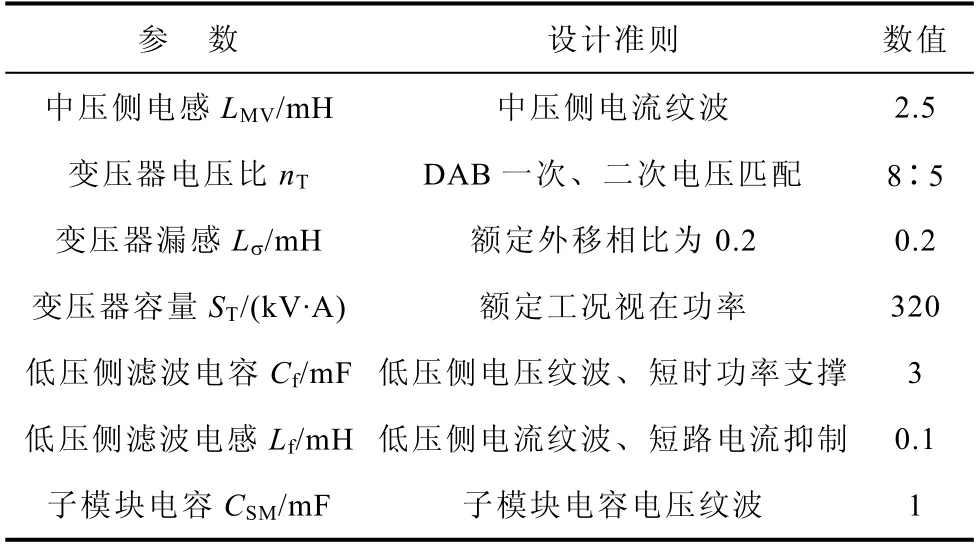
表2 MMBDC 硬件參數設計準則及數值Tab.2 Design criteria and designed values of hardware parameters of MMBDC
以GMDI為例對本文所建立的數學模型進行仿真驗證。在任意一個半橋子模塊占空比上疊加1 Hz~2 kHz 的正弦擾動,并在中壓側電流處提取相應頻率的擾動分量,計算出仿真測量的傳遞函數,同樣代入表2 所示參數,得到GMDI伯德圖仿真證明如圖2 所示。可以看出,GMDI在222 Hz 附近有一個諧振峰,且全頻段仿真結果與所建立的數學模型符合度較高,說明了數學模型的準確性。
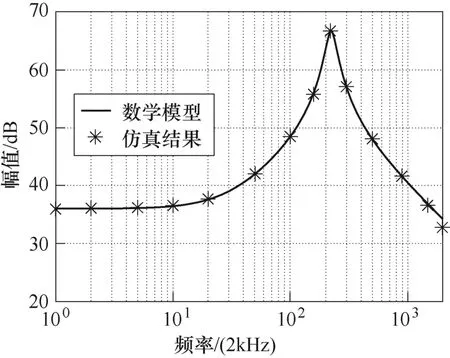
圖2 GMDI 伯德圖仿真證明Fig.2 Simulation verification of GMDI Bode diagram
DAB 傳統的建模方法為降階模型,該種模型計算簡單,但忽略了漏感電流這一狀態變量,導致模型精度存在較大偏差,在中高頻段偏差尤為明顯。對此,研究者提出采用廣義平均模型對DAB 進行建模[20-22]。DAB 的廣義平均模型引入了漏感電流的基波分量,提高了DAB 模型精度。
當低壓側連接無源負載時,DAB 狀態方程為
式中,s1和s2分別為DAB 一次、二次側H 橋的開關函數。當VTD1和VTD4導通時,s1=1;當VTD2和VTD3導通時,s1=-1;當VTD5和VTD8導通時,s2=1;當VTD6和VTD7導通時,s2=-1。RD為單個DAB 等效電阻負載。帶上標“'”的變量均為歸算到變壓器一次側的值。
DAB 漏感電流可以視為純交流分量,低壓側濾波電容電壓和濾波電感電流可以視為純直流分量,式(7)寫成廣義平均模型形式為
設DAB 的控制輸出為輸入電流iD、輸出電流iLf和輸出電壓uLV,將這三個變量均視為直流量,則其輸出方程的廣義平均模型為
將式(8)和式(9)代入廣義平均模型的換算公式[20-21],并分離小信號即可得到DAB 的小信號廣義平均模型狀態空間方程。具體推導如附錄第2 節所示。
本文以外移相比到低壓側漏感電流的傳遞函數GDDIL為例進行了仿真證明,結果如圖3 所示。可以看出,仿真結果與理論模型在全頻段一致性較好,驗證了所建立數學模型的準確性。
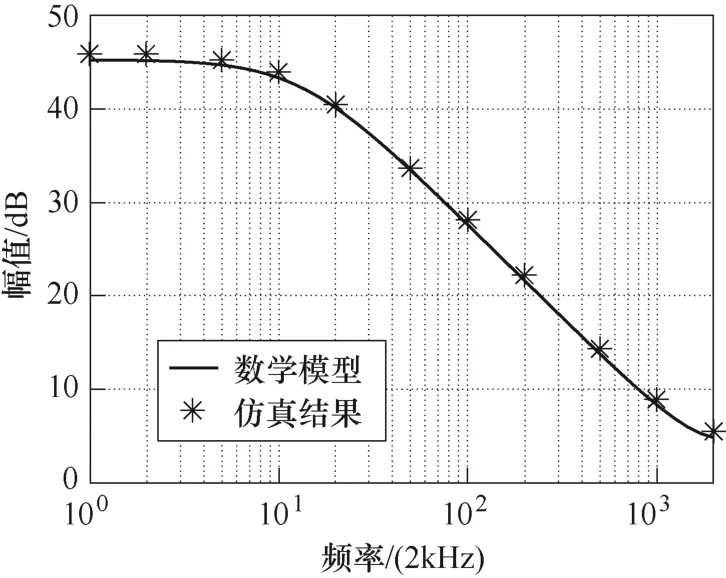
圖3 GDUIL 伯德圖仿真證明Fig.3 Simulation verification of GDUIL Bode diagram
低壓側連接有源負載時,DAB 的數學模型的推導方法與低壓側連接無源負載時相似,推導過程不再贅述。圖4 為低壓側連接有源負載時DAB 外移相比到低壓側濾波電感電流的傳遞函數GD'DIL的仿真證明結果。可以看出,理論曲線與仿真證明結果在全頻段吻合度較高,驗證了數學模型的準確性。
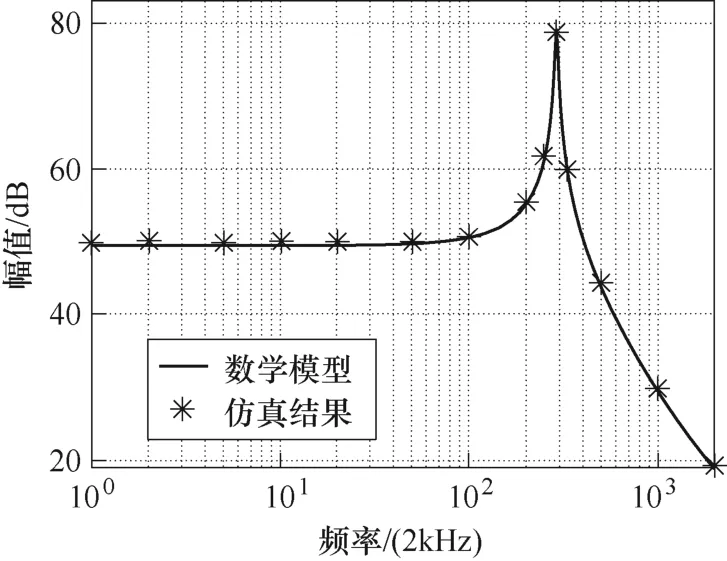
圖4 GD'DIL伯德圖仿真證明Fig.4 Simulation verification of GD'DIL Bode diagram
比較圖3 和圖4 也可以發現,當DAB 低壓側連接有源負載時,外移相比到低壓側濾波電感電流的傳遞函數存在一個諧振峰,其諧振頻率即為低壓側濾波電容和低壓側濾波電感產生的LC 串聯諧振頻率,表達式為
2 MMBDC 控制策略
2.1 MMC 傳統控制策略
傳統的直流多端口MMC 子變換器控制策略框圖如圖5 所示[9]。其由通過各子模塊共用的平均電壓外環、獨立的均壓外環以及獨立的輸出電流內環組成。
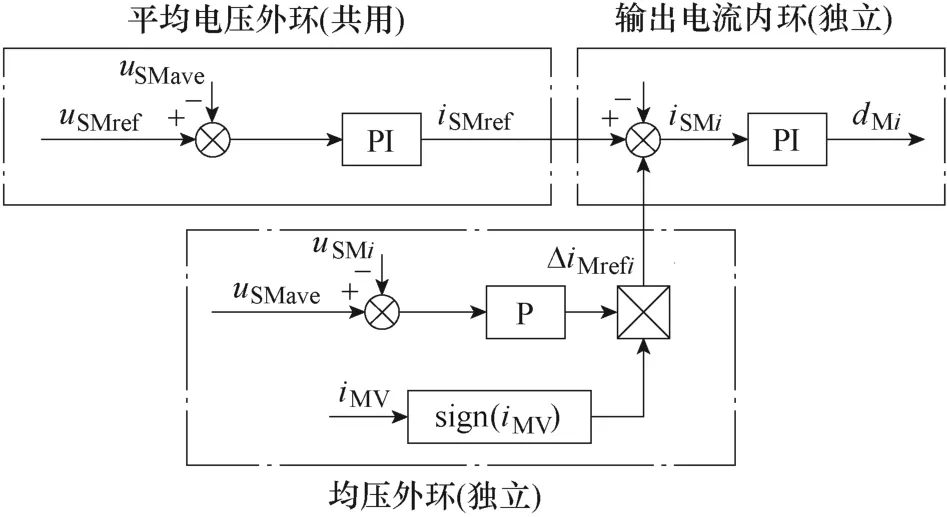
圖5 MMC 傳統控制策略Fig.5 Traditional control strategy of MMC
圖5 中,PI 表示比例積分調節器,P 表示比例調節器,sign()表示取符號函數。傳統控制策略使變換器穩定運行在額定工作點,但也存在如下缺陷:①由于子模塊輸出端沒有感性元件,iSMi紋波較大,采樣較難;②平均電壓環與均壓環存在耦合,控制參數設計較難;③中壓側電流不受控,存在過電流風險;④未考慮直流多端口MMC 固有的低頻振蕩問題。將圖5 所示的控制策略應用于中高壓大功率應用時,這些問題更為明顯。
2.2 MMC 基于陷波器的三環解耦控制策略
針對上述傳統控制策略存在的問題,本文針對直流多端口MMC 子變換器提出了一種基于陷波器的三環控制策略如圖6 所示。圖中,NF 表示陷波器。上述策略采用中壓側電感電流iMV作為平均電壓環的內環控制變量。平均電壓外環產生中壓側電流內環的給定iMVref,通過陷波器抑制式(6)所示的低頻諧振點,然后經過PI 調節器后產生子模塊共用的占空比dMC。均壓環的PI 輸出乘以中壓側電流方向Sign(iMV)后產生占空比的補償量ΔdMi,然后將dMC與ΔdMi作差得到各子模塊的下管占空比dMi。在所提出的控制策略中,前N-1 個子模塊的占空比補償量由PI 調節器算出,而最后第N個子模塊的占空比補償為0 減去其余子模塊占空比補償量之和,即
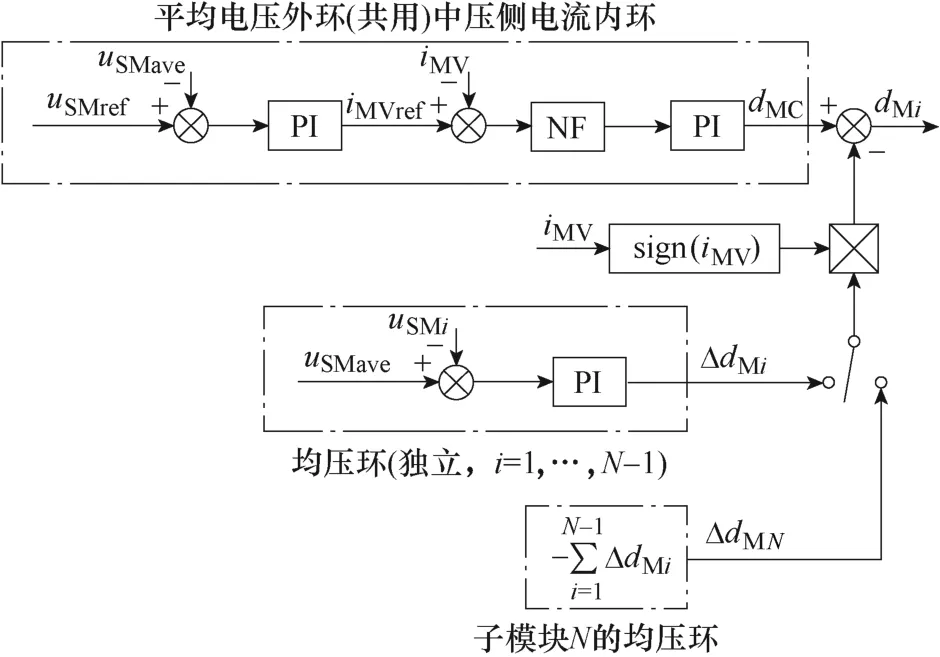
圖6 MMC 改進控制策略Fig.6 Advanced control strategy of MMC
以中壓側電流正向流動為例,中壓側電流反向流動時分析方法與之相同。首先根據MMC 數學模型,可以得到關系式為
又根據圖6 得到
結合式(12)和式(13)有
對式(14)進行小信號分離,并假設各子模塊占空比和子模塊電容電壓的穩態值分別一致,可以推得
從式(15)可以看出,若在設計均壓環時令式(13)成立,即所有均壓環的輸出之和為0,那么中壓側電流和子模塊電壓之和(或平均值)僅受到平均電壓環的共用占空比擾動以及中壓側電壓擾動影響。換言之,平均電壓環不受均壓環的影響。這樣在實際應用中就可以首先對平均電壓環設計控制參數,然后在此基礎上對均壓環進行控制參數設計。需要說明的是,上述控制策略僅保證了平均電壓環不受均壓環的影響,但無法保證均壓環不受平均電壓環的影響。
從圖6 可以看出,所提出的控制策略為了實現均壓環的解耦,破壞了各子模塊控制策略的對稱性,可以進一步對其進行簡化。設前N-1 個子模塊的PI調節器傳遞函數為GPI_MUB,由圖6 所示策略得到
式(16)表明,第N個子模塊的均壓環和前N-1 個子模塊是一致的,因此,圖6 可以簡化為如圖7 所示的簡化MMC 改進控制策略。

圖7 簡化MMC 改進控制策略Fig.7 Simplified advanced control strategy of MMC
2.3 MMC 控制策略對比
2.2 節中提到,所提出的基于陷波器的MMC 三環解耦控制策略可以抑制低頻諧振。在傳統控制策略中,由于未引入陷波器,為了保證控制系統穩定性,需要犧牲動態響應速度;而所提控制策略通過引入陷波器解決了該矛盾。下面進行具體量化分析。
根據圖5 和圖7 可以推導出傳統控制策略下和所提控制策略下電流內環的開環傳遞函數為
式中,TMI為電流內環PI 調節器傳遞函數;GMNF為所提控制策略的陷波器傳遞函數,其表達式分別為
式中,kNF為陷波系數;ωrMI為陷波角頻率。
對式(17)中兩個開環傳遞函數代入表2 參數,在傳統控制策略下選擇PI 參數(kpi=0.000 1,kii=0.2),在所提控制策略下選擇PI 參數(kpi=0.002,kii=4),得到傳統策略與所提策略伯德圖對比如圖8所示。可以看出,在所設計的PI 參數下,傳統控制策略與所提控制策略在222 Hz 諧振點附近的幅值均為0 dB 左右。二者相位裕度分別是94.3 °和95.2 °,差異不大。但所提控制策略的截止頻率(206 Hz)遠大于傳統策略的截止頻率(7.97 Hz)。此現象表明,所提控制策略由于引入了陷波器,以中壓側電流為控制目標的內電流環的環路設計帶寬遠大于傳統控制策略的帶寬,大大加快了變換器的動態響應速度。
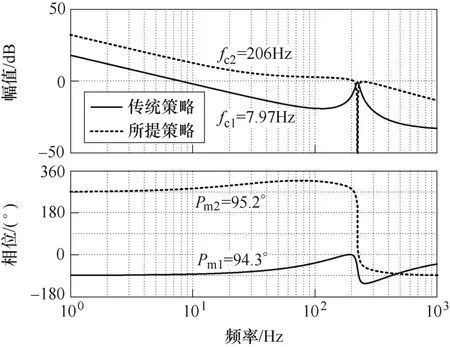
圖8 傳統策略與所提策略伯德圖對比Fig.8 Comparison between the Bode diagrams of the traditional strategy and the proposed strategy
2.4 DAB 基于陷波器的雙向功率控制策略
由于各支路差異較小,本文在DAB 中采用共外移相比控制策略。
當低壓側連接無源負載時,采用雙閉環控制策略,外環控制低壓直流母線電壓,內環控制各支路平均輸出電流。帶無源負載時DAB 控制策略如圖9所示。具體而言,首先將低壓側電壓參考uLVref與實際值uLV作差,經過PI 調節器后產生低壓側總輸出電流iLVref參考。將總輸出電流參考iLVref均分到各條支路形成DAB 輸出電流參考iLfref,再與各支路輸出電流平均值iLfmean作差,經過PI 調節器后產生共用的外移相比dD。上述雙閉環控制策略是各支路共用的。
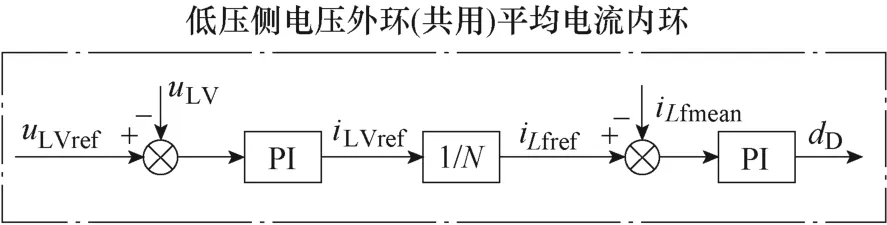
圖9 帶無源負載時DAB 控制策略Fig.9 Control strategy of DAB with passive load
低壓側連接有源負載,如超級電容或蓄電池,由DAB 控制低壓側端口電流。式(10)展示了在此工況下存在的LC 低頻諧振問題。對此,本文在電流控制環路中引入陷波器對其進行抑制,控制策略框圖如圖10 所示。
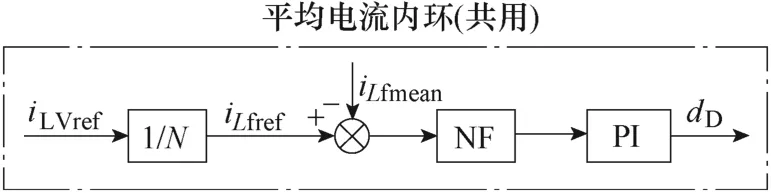
圖10 帶有源負載時DAB 控制策略Fig.10 Control strategy of DAB with active load
3 MMBDC 樣機設計與實驗
3.1 硬件參數設計
本文設計硬件參數的輸入條件為:中壓直流母線電壓uMV=10 kV,低壓直流母線電壓uLV=1 kV,裝置額定總功率ptot=2 MW。結合參數設計的輸入條件和現有IGBT 器件的水平,本文選擇額定電壓為3 300 V 的IGBT 作為MMBDC 中壓側(包括MMC 和DAB 一次側)的開關器件,并設計工作電壓為1 600 V。為了實現中壓側電感LMV的伏秒平衡,MMBDC 的支路數量和子模塊電容電壓必須滿足以下約束
根據式(19)所示的約束,MMBDC 的最小支路數為7,本文將支路數取值為N=8。
由于MMC 不具備軟開關特性,而DAB 由于一次電壓可調,可以始終運行在軟開關運行范圍內,開關損耗較低,因此,MMC 開關頻率設計值應低于DAB 開關頻率設計值。經過損耗計算和熱仿真驗證,本文將MMC 開關頻率fM設計為2 kHz,將DAB 開關頻率fD設計為4 kHz。其余硬件參數的設計準則及數值見表2。
3.2 絕緣設計
MMBDC 中壓側直流母線電壓高達10 kV,超出了常用的低壓電氣元件的絕緣等級,為器件選型、電氣柜機械結構設計帶來了挑戰。本文在進行絕緣設計時主要有以下幾點考慮。
(1)各支路連接在中壓側的功率單元(包括MMC 的開關器件、DAB 一次側的開關器件、吸收電容、子模塊電容、復合母排、水冷板等元器件)均分別固定在同一金屬支撐架上。該金屬支撐架即為各支路中壓側浮地,金屬支撐架通過絕緣材料與外機殼相連。浮地設計示意圖如附錄第3 節所示。
(2)各支路子模塊電容電壓、變壓器漏感電流、MMC 與DAB 一次側的功率單元溫度,均通過各支路獨立的中壓側控制箱進行采樣,功率單元溫度通過溫度變送器采樣。
(3)各支路中壓側元器件供電的輔助電源模塊應通過獨立的隔離變壓器與220 V 交流輸入進行安全隔離。
(4)各支路中壓側控制箱、輔助電源以及相應的隔離變壓器的外殼直接連接到各支路的中壓側浮地上。中壓側輔助供電模塊的各路輸出的模擬地以及子模塊電容負極通過20 kΩ 絕緣電阻連接到浮地上。
3.3 控制系統架構
10 kV 超出了常規控制器的采樣電路和調理電路的耐壓等級。為了保證控制器的安全,各支路中壓側和低壓側的電氣量應采用不同的控制器分開采樣。對此,本文針對MMBDC 提出了“一主十從”的環網控制架構,MMBDC 控制系統架構如圖 11所示。
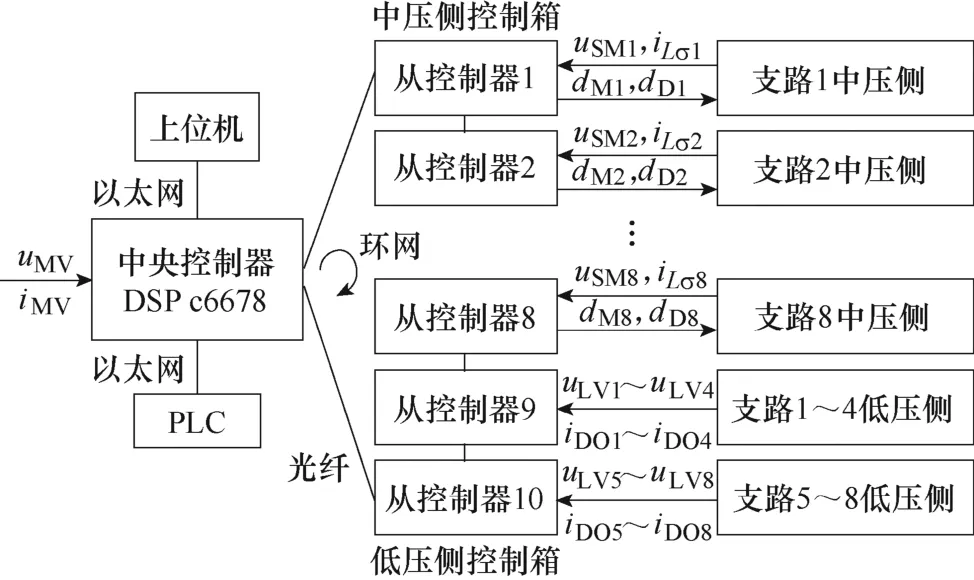
圖11 MMBDC 控制系統架構Fig.11 Control system architecture of MMBDC
在圖11 所示的“一主十從”控制架構中,主控制器和每個從控制器均設置了獨立的FPGA 來進行環網通信和電氣量的采集。所有采樣的電氣量通過環網傳遞到中央控制器的FPGA 中去,再通過UDP傳輸到 DSP。所有的控制算法均通過主控制器的DSP 來實現。DSP 再將計算結果通過環網下發到從控制器的FPGA 中去產生PWM。
如圖11 所示,主控制器負責采樣10 kV 側的電氣量,包括中壓側電壓和中壓側電流。從控制器1~8 分別負責對應支路的子模塊電容電壓、漏感電流、中壓側IGBT 溫度等變量的采樣。低壓側電氣量包括低壓側電壓和低壓側電流均由從控制器9 和10來進行采樣。第i條支路的所有驅動信號,均由第i個從控制器的FPGA 發出,以降低環網通信延遲。
MMBDC 包含的子變換器較多,控制算法較為復雜。為了加快算法執行速度,選擇TMS320C6678作為主控芯片,通過以太網和PLC 以及上位機進行通信。用戶可以用上位機實時觀測DSP 數據,也可以下發機械開關動作指令或進行在線調參。PLC 負責控制MMBDC 樣機中的機械開關。
3.4 電氣柜結構布局
MMBDC 樣機實物及俯視圖如圖12 和圖13 所示。

圖12 MMBDC 樣機實物Fig.12 Photo of MMBDC prototype
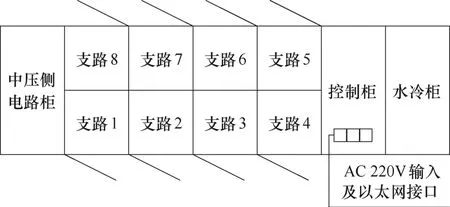
圖13 MMBDC 樣機俯視圖Fig.13 Vertical view of MMBDC prototype
從圖12 和圖13 可以看出,MMBDC 工程樣機由11 個電氣柜構成:中壓側電路柜、控制柜、水冷柜及8 個支路柜。每個電氣柜的構成及功能如下。
(1)中壓側電路柜為MMBDC 提供連接中壓直流母線的接口以及保護和檢測元件。其包含熔斷器、預充電電路、中壓側支撐電容、中壓側電感以及對應的霍爾器件。
(2)8 個支路柜分別對應8 條支路,采用模塊化設計,每個支路柜元器件及結構布局完全相同。8個支路柜“背靠背”布置,便于檢修維護。每個支路柜分成4 層:第1 層裝設中壓側控制箱以及輔助電源模塊;第2 層為中壓側IGBT 功率單元;第3層為中頻變壓器;第4 層為低壓側IGBT 功率單元。本文考慮到磁粉芯的高頻特性較好,將其作為中頻變壓器的鐵心材料。
(3)主控制器、低壓側從控制器9 和10、PLC以及以太網光纖交換機都集成在控制柜中。
(4)MMBDC 主要器件均采用水冷的散熱方式。水冷柜額定功率為 84 kW,內水額定流速為305 L/min,采用去離子水來保證安全隔離。此外,每個支路柜柜門上還設計了風扇來實現柜體內外空氣流通。
3.5 實驗結果
首先對 MMBDC 進行了靜態實驗。中壓連接10 kV 直流電源,低壓側電阻負載包括滿載0.5 Ω和輕載0.937 5Ω 兩種。子模塊電壓給定為1 600 V,低壓側電壓給定分別為800、900 和1 000 V。滿載和輕載工況下的穩態實驗數據見表3。本文所采用的中壓直流電源是由民用交流配電網通過不控整流產生的,受到配電網實時負荷的影響,所以不能剛好保持在10 kV 上。
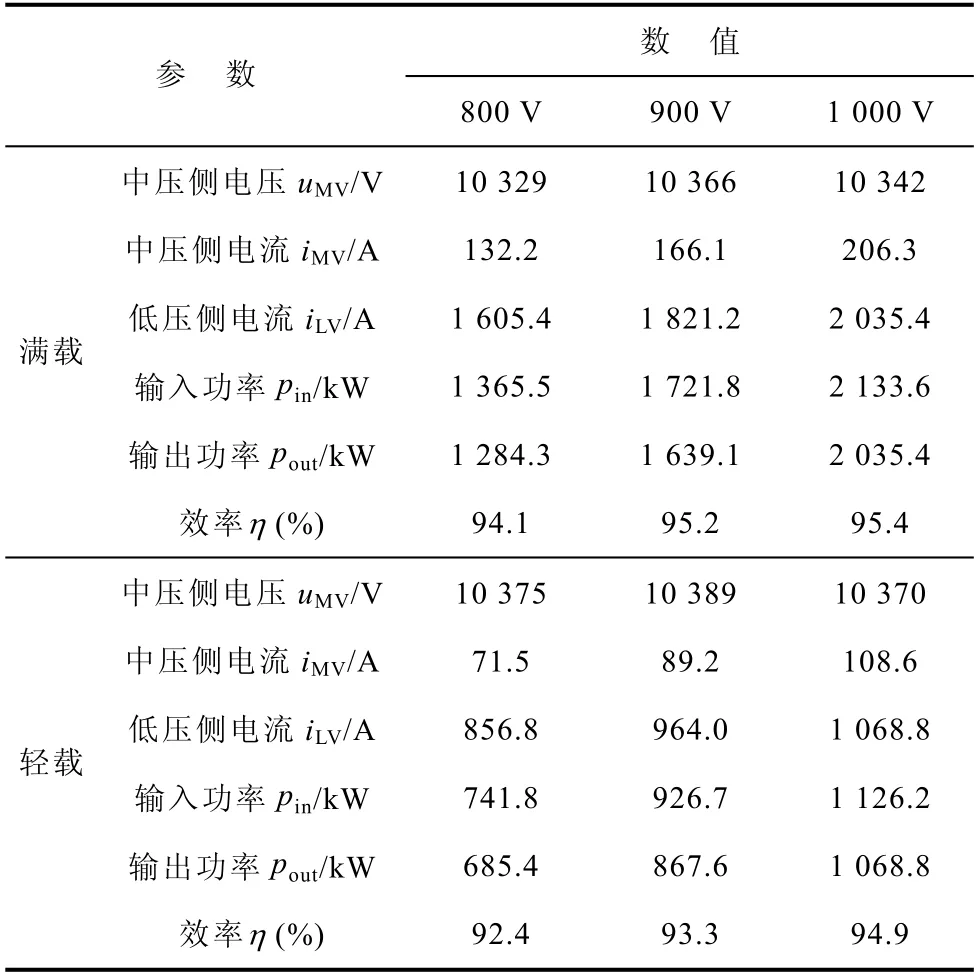
表3 MMBDC 穩態實驗結果Tab.3 Steady-state experiment results of MMBDC
低壓直流母線電壓、輸出功率標幺值以及運行效率的關系如圖14 所示。從圖14 可以看出,滿載工況下MMBDC 的運行效率都在95 %以上,滿足電力電子變換器對效率的一般要求[23-25]。總體上看,MMBDC 輸出功率越大,效率越高。
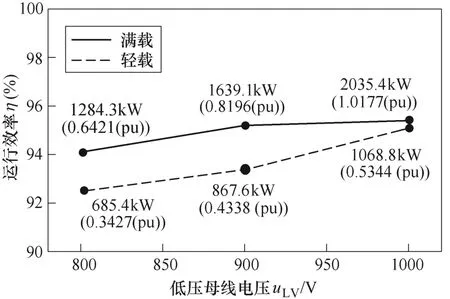
圖14 不同低壓側電壓下的穩態實驗結果Fig.14 Steady-state experimental results under different LVDC voltage
圖15 為MMBDC 在額定功率2 MW 下運行的穩態實驗波形,實驗數據由上位機采集。從圖 15可以看出,MMBDC 可以穩定運行,各子模塊電容電壓均衡,低壓側輸出電流一致性較好,低壓側輸出電壓紋波僅為額定值的0.49 %。
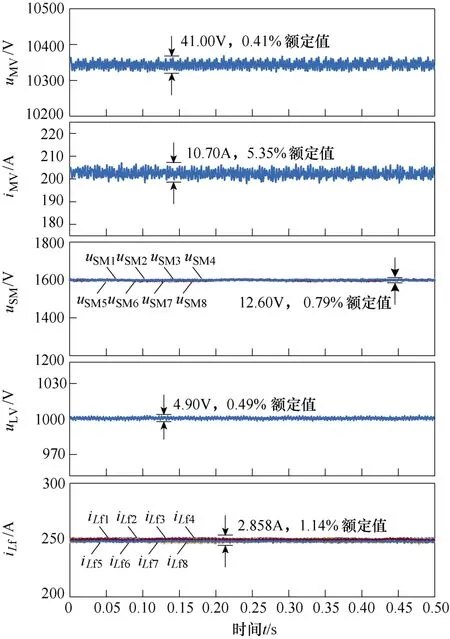
圖15 MMBDC 在額定工況下的穩態實驗波形Fig.15 Steady-state experimental waveforms of MMBDC under rated working condition
本文為了抑制起動電流,采用了擴展移相調制。但本文DAB 一次、二次電壓匹配程度較高,因此,擴展移相調制與單移相調制的穩態波形很接近。DAB 子變換器的實驗波形如圖16 所示。從實驗波形可以看出,DAB 一次電壓為1 600 V,二次電壓為 1 000 V,二者的比值與中頻變壓器電壓比 8∶5一致。盡管實際情況下由于元器件參數和采樣的偏差,一次、二次電壓并不能完全匹配,但也能保證DAB 軟開關、中頻變壓器漏感電流呈梯形波。
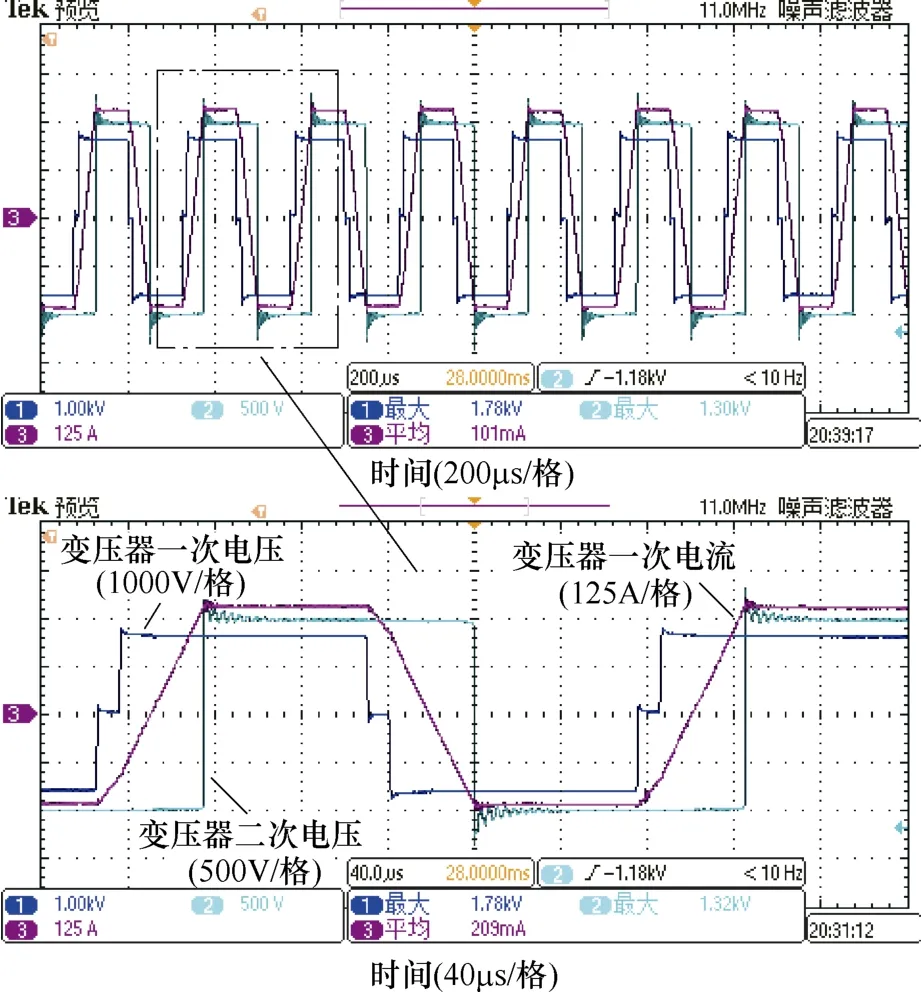
圖16 DAB 實驗波形Fig.16 Experimental waveforms of DAB
本文進行了MMBDC 動態加載卸載實驗。將低壓側電壓給定和子模塊電容電壓給定分別設置為1 000 V和1 600 V,將負載電阻通過斷路器從0.937 5Ω 切換至0.5 Ω 的動態加載實驗波形如圖17 所示。
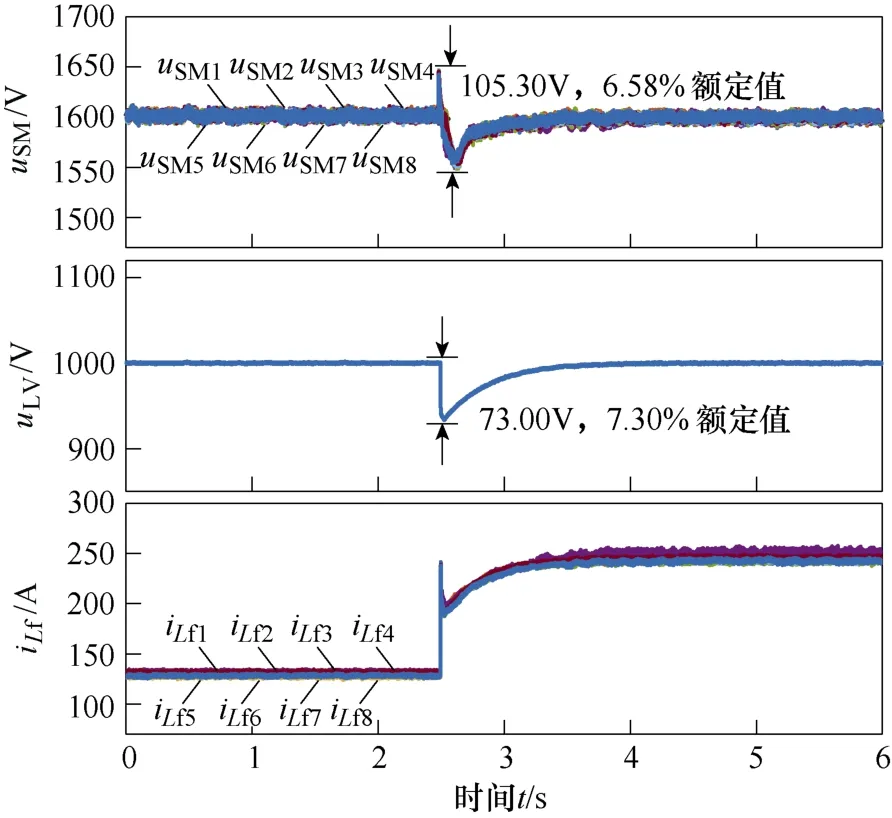
圖17 動態加載實驗波形Fig.17 Transient experimental waveforms of loading
由圖17 可以看出,突加負載時,子模塊電容電壓波動為105.30 V,占額定值的6.58 %。低壓側電壓波形為7.30 V,占額定值的7.30 %。動態調節過程為0.35 s。
將負載電阻從0.5 Ω 切回0.937 5 Ω,可以得到動態卸載實驗波形如圖18 所示。此時子模塊電壓波動為74.50 V,占額定值的4.66 %。低壓側電壓波動為99.50 V,占額定值的9.95 %。整個動態卸載的調節過程約為0.4 s。
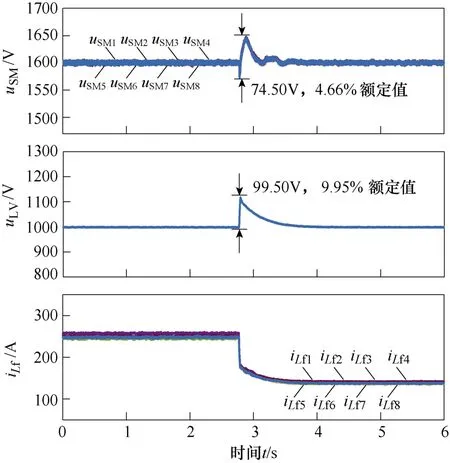
圖18 動態卸載實驗波形Fig.18 Transient experimental waveforms of unloading
以上實驗結果表明,所設計的MMBDC 工程樣機在所提出的控制策略下呈現出較好的動靜態性能,說明了設計方法和控制策略的有效性。
為了驗證MMBDC 在所提控制策略下的雙向功率傳輸特性,本文在低壓側連接了集中式超級電容,并進行了雙向功率傳輸實驗驗證。超級電容柜實物如圖19 所示。整個集中式超級電容由2 個超級電容柜組成,單個超級電容柜的參數見表4。
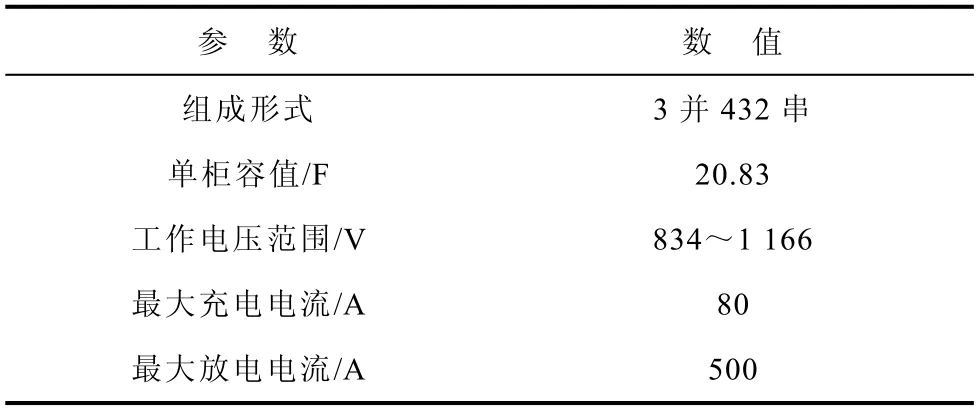
表4 單個超級電容柜參數Tab.4 Parameters of a single supercapacitor cabinet
圖19 超級電容柜實物Fig.19 Photo of the supercapacitor cabinets
根據超級電容的充放電特性,本文采用一種“慢充快放”的恒流充放電控制策略,并設計了如下驗證實驗。首先對超級電容進行充電,充電電流給定為160 A,當超級電容電壓達到1 050 V 時,將電流給定改變為0;然后再改為-1 000 A,進入放電模式。當超級電容放電至850 V 時,再將電流指定置零,并切換為160 A,重新進入充電模式,如此往復。圖20 為MMBDC 雙向功率控制實驗波形。可以看出,在所提出的控制策略下,MMBDC 的雙向功率控制有較好的動靜態特性。
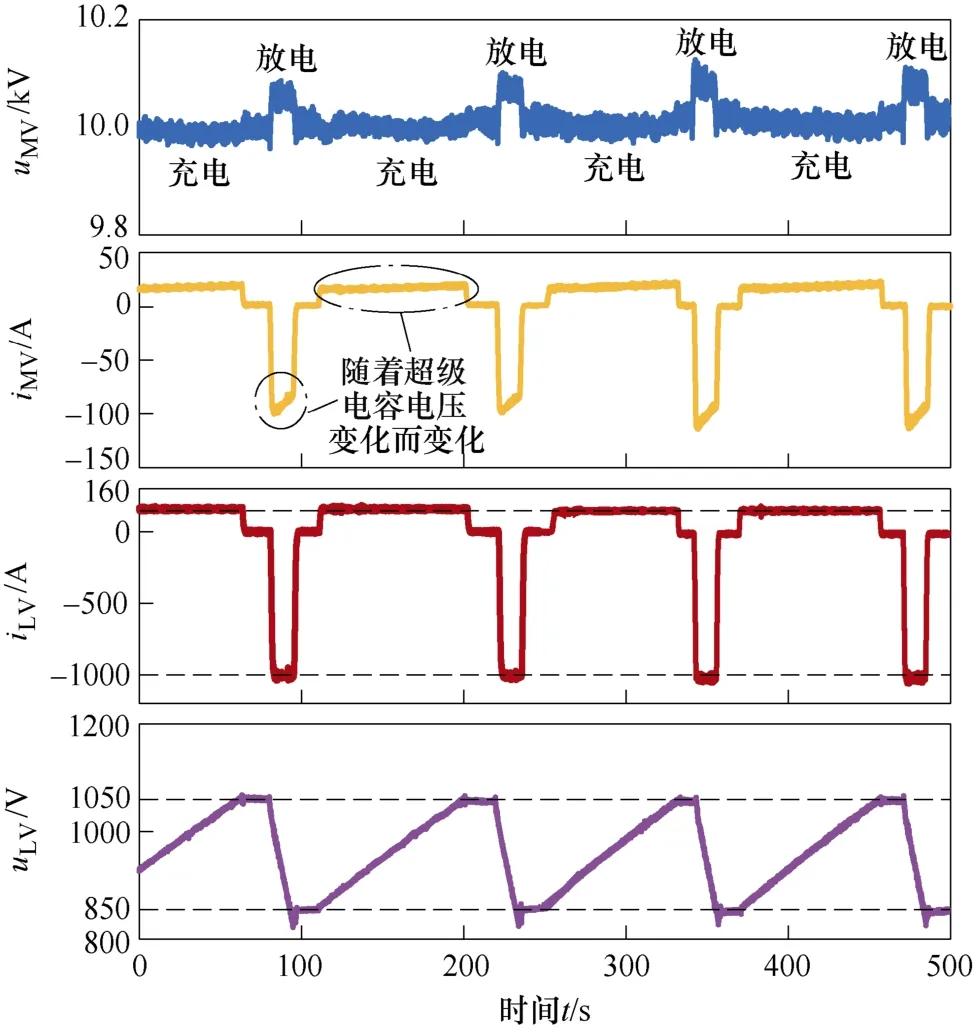
圖20 MMBDC 雙向功率控制實驗波形Fig.20 Experimental waveforms of bidirectional power control of MMBDC
4 結論
為了滿足新一代艦船綜合電力系統實際需求,本文對MMBDC 控制策略開展研究,主要結論如下。
1)分析了MMBDC 拓撲原理,發現其存在中壓側電感與各支路開關電容串聯諧振的問題,諧振頻率如式(6)所示。
2)針對直流多端口MMC 子變換器提出了一種基于陷波器的三環解耦控制策略。與傳統策略相比,所提控制策略采用中壓側電流作為內環控制量,方便了反饋信號采樣;使得中壓側電流可控,規避了中壓側過電流風險;實現了均壓環與平均電壓環的解耦,簡化了控制參數設計;在環路中引入了陷波器,通過對低頻諧振點的抑制,將內電流環帶寬從7.97 Hz 提高至206 Hz。
3)本文設計并制造了10 kV/2 MW 的MMBDC工程樣機。介紹了該樣機的絕緣設計、控制系統架構以及電氣柜結構布局,并進行了所提控制策略的動靜態實驗。靜態實驗結果表明,在本文所提控制策略下,變換器滿載額定工況效率可達95.4 %,低壓側電壓紋波僅為額定值的0.49 %;動態加減載實驗表明,在所提控制策略下進行47 %額定負荷加減載時,最大子模塊電容電壓波動為額定值的6.58 %,最大低壓側電壓波動為額定值的9.95 %,動態調節過程不超過0.4 s。動靜態實驗結果說明了所提控制策略的有效性。
4)本文研究也可以說明,MMBDC 在MW 級工程應用中的可行性,可為其他中壓變換器的設計和制造提供參考。
此外,為了對所提控制策略進行實驗驗證,本文設計并制造了10 kV/2 MW 的MMBDC 工程樣機。介紹了該樣機的絕緣設計、控制系統架構以及電氣柜結構布局,并給出了所提控制策略的動靜態實驗結果,驗證所提策略的有效性。
附 錄
1.MMC 小信號模型
式(4)變換到頻域并寫成矩陣形式為
式中,各項元素的表達式如式(A2)所示。
由式(A1)得到
式中,GMO為MMC 的開環傳遞函數矩陣。由于不考慮移相角,根據對稱性,各占空比到對應子模塊電壓的傳遞函數GMDUC相同,各占空比到非對應子模塊電壓的傳遞函數GMDUN相同,各占空比到中壓側電流的傳遞函數GMDI相同。各負載電流到對應子模塊電壓的傳遞函數GMIUC相同,各負載電流到非對應子模塊電壓的傳遞函數GMIUN相同,各負載電流到中壓側電流的傳遞函數GMII相同。
因此,GMO只包含八種傳遞函數(上述六種傳遞函數,外加中壓側電壓到中壓側電流的傳遞函數GMUI和中壓側電壓到子模塊電壓的傳遞函數GMUU),整體如式(A4)所示。
2.DAB 小信號模型
當DAB 低壓側連接電阻負載時,根據式(8)和式(9)可以列出DAB 廣義平均模型如式(A5)和式(A6)所示。
式中,上標“R、I”分別表示該系數的實部和虛部,上標“*”表示變量的平均值。
3.絕緣設計示意圖
MMBDC 絕緣設計如附圖1 所示。
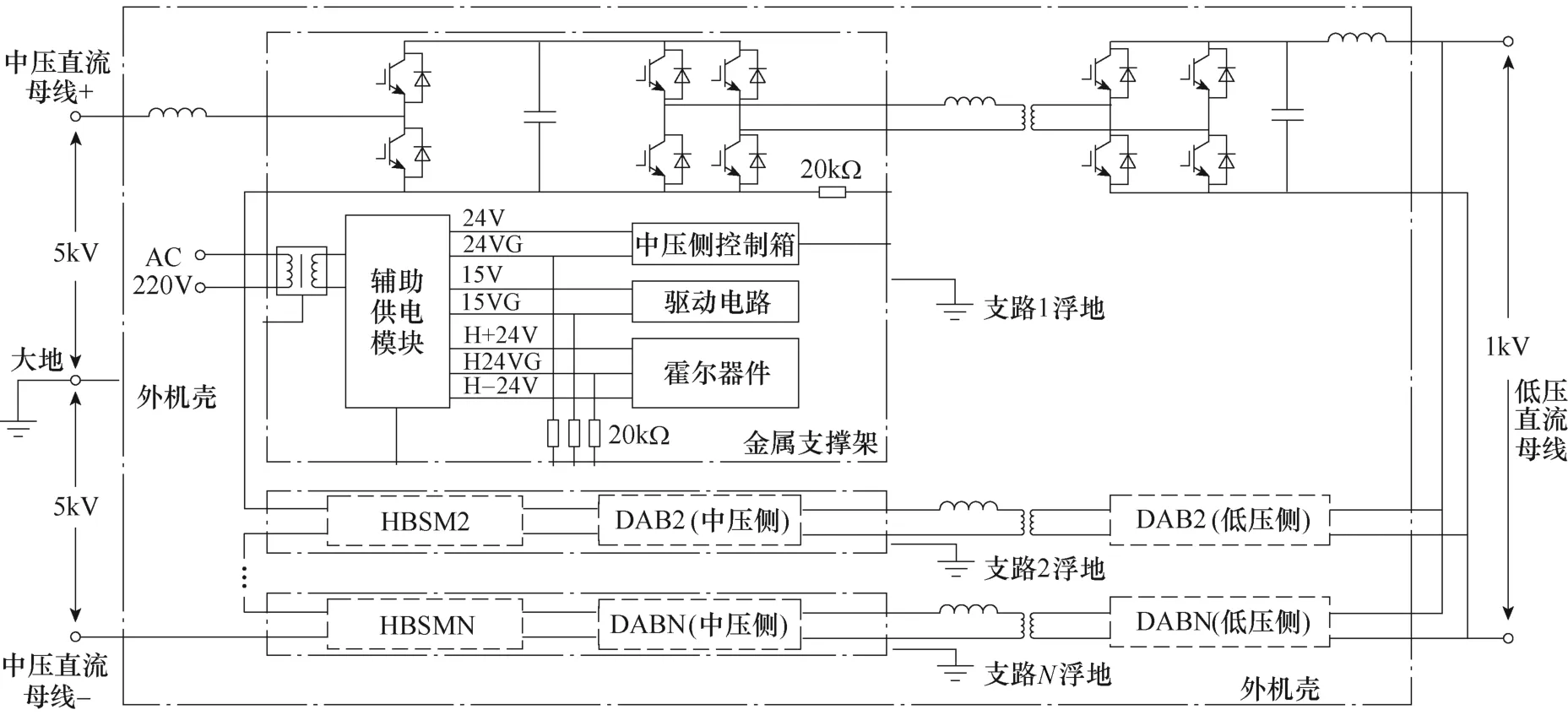
附圖1 MMBDC 絕緣設計App.Fig.1 Insulation design of MMBDC
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
山東冶金(2019年3期)2019-07-10 00:54:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
消費導刊(2018年10期)2018-08-20 02:57:02
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24