磁保持型航天電磁繼電器性能提升與質量一致性設計
2023-03-04 06:57:20葉雪榮梁慧敏翟國富
電工技術學報 2023年4期
陳 昊 葉雪榮 梁慧敏 翟國富
(哈爾濱工業大學電氣工程及自動化學院 哈爾濱 150001)
0 引言
磁保持航天電磁繼電器(Magnetic Latching Aerospace Electromagnetic Relay,MLAER)是一種典型的機電類元器件,具有靈敏度高、輸入輸出比大、發熱小、抗干擾能力強、功耗低和體積小等一系列固態電子器件不可替代的優點,廣泛應用于長征、神舟系列運載火箭和嫦娥系列飛船、高分系列衛星等航天裝備的自動控制系統[1-2]。
然而,MLAER 目前仍然是所有航天裝備用電子元器件門類中質量與可靠性最差的器件。據統計,近15 年共發生元器件性能與可靠性問題導致的裝備延期與服役故障高達數百項,電磁繼電器占比超過一半,MLAER 排序第一,因此MLAER 性能提升與質量一致性設計問題引起了廣泛的關注[3-4]。
磁保持航天電磁繼電器作為機-電-磁-熱多物理場耦合作用的機電類元器件,其性能特征的準確計算是開展性能提升與質量一致性設計的重要基礎與前提。基于有限元技術的虛擬樣機仿真模型是一種常用的方法[5-7],現有虛擬樣機方法忽略了非線性永磁體充退磁過程中工作點和磁滯回線的變化,MLAER 的計算結果與設計差距較大。此外,其更大問題是存在嚴重的計算災,難以直接應用于需要大量樣本計算的質量一致性優化。
為了提高MLAER 的計算效率,學者們提出等效磁路模型[8-9],這種方法在一定程度上解決了計算效率的問題,但由于漏磁通、漏磁導及磁飽和程度難以精確評估,故計算精度難以滿足需求。針對虛擬樣機計算效率低和磁路法精度差的問題,學者們提出了代理模型方法[10-14],響應面代理模型雖然建模簡單但計算強非線性性能特征時誤差較大。徑向基代理模型具有較強的高維非線性擬合和局部逼近能力,不會出現局部極小問題,但其對樣本數量和樣本數據質量要求較高。克里金代理模型在相同樣本數據點下可顯著提升高維非線性性能特征的建模精度,但其對樣本數據的有效性非常敏感,易在局部產生較大誤差。更重要的是,上述代理模型降低性能特征計算對硬件的需求,提高了計算效率,但這些代理模型大都以虛擬樣機計算結果為基準進行建模,虛擬樣機計算本身在計算MLAER 時便存在計算精度差的問題,依賴樣本質量的徑向基和克里金方法無法從本質上提升性能特征的計算精度。
代理模型提高了MLAER 的計算效率,但在性能優化與質量一致性設計上需要解決MLAER 銜鐵中位、動作電壓參數、動作時間參數、力學性能、熱學性能、電壽命等多目標特征之間相互制約。因此學者們提出了一些多目標智能尋優方法[15-17],這些智能尋優方法雖然進一步提高了MLAER 的尋優效率并在一定程度上實現了多目標綜合優化,但只是在海量方案中隨機遴選滿足預設要求的設計方案,并不清楚設計參數組合與MLAER 性能特征之間的作用機制,尋優迭代較為盲目、耗時較長且迭代收斂魯棒性不佳。
本文充分考慮非線性各向異性永磁體充退磁過程中的局部磁滯效應,基于斯通納-沃爾法斯模型[18]和Preisach 模型[19],建立MLAER 局部磁滯模型,進而建立可準確計算其靜、動態特征的虛擬樣機模型;在此基礎上,借鑒模糊混沌展開替代建模方法適用于強非線性、徑向基函數替代建模方法逼近能力強的特點,將樣機實測結果引入替代建模,較好地解決了虛擬樣機計算速度慢、容易不收斂及替代模型精度低的問題。在此基礎上,明確MLAER 設計參數與性能特征之間的作用規律,并通過改進差分進化多目標尋優算法,進一步提高質量一致性設計的迭代尋優速度、收斂性和魯棒性,從而實現多目標優化設計,提升綜合性能,改善質量一致性。以雙磁鋼差動式MLAER 為例進行消除銜鐵中位、降低動作電壓、提升電壽命和提高質量一致性等優化設計,驗證本文方法的有效性。
1 磁保持型航天電磁繼電器性能提升與質量一致性設計方法
1.1 MLAER 性能提升與質量一致性設計概述
本文針對MLAER 存在非線性和輸出過零特性導致虛擬樣機收斂性差、計算精度差、銜鐵中位、動作電壓高及電壽命低等問題,提出一種適用性強、可用于各類電磁繼電器尋優過程的質量特征計算和一致性多目標設計方法。分析MLAER 中非線性各向異性永磁體的實際工作點,基于實際工作點使用S-W 模型計算得到永磁體的磁偶極子的矢量化信息,將矢量化信息代入Preisach 模型計算得到永磁體局部磁滯回線模型。將局部磁滯回線代入Flux 電磁系統樣機模型,計算得到MLAER 電磁吸力(矩)和磁鏈,在Ansys 中建立觸簧系統柔性運動多體的柔性體機構,在Adams 中建立觸簧系統機械反力(矩)計算模型,在Matlab/Simulink 通過數據接口將吸力(矩)傳遞給動力學軟件開展動作過程分析,同時動力學軟件將求得的銜鐵(角)位移等動力學參量反饋給Matlab/Simulink,最終建立MLAER 虛擬樣機模型。制作半開放式實物樣機,實測繼電器動作電壓、吸合時間、釋放時間等性能參數,對比驗證虛擬機樣機計算精度。
隨后在繼電器各個參數設計允許范圍內使用均勻抽樣設計生成樣本點,虛擬樣機模型計算得到各個樣機的性能特征,利用模糊混沌展開代理建模方法得到各個設計參數和性能特征之間的數學關聯關系作為代理模型的基函數。模糊混沌展開得到的基函數模型與實物樣機之間往往存在一定偏差,使用最速曲率方法計算性能參數誤差較大的位置,以其對應的設計參數為基準,制造相應的實物樣機。并以實物樣機實測結果與模糊混沌展開基函數計算結果的差值作為插值節點,使用徑向基函數方法得到誤差補償函數,模糊混沌展開基函數與徑向基誤差補償函數組成本文的MLAER 性能特征代理模型。
代理模型的建立提高了MLAER 的性能特征計算與分析的精度和效率,由于質量一致性設計需要的大量樣本及多目標之間的相互制約,完成性能提升和質量一致性設計仍需花費較多的時間和占用大量的計算資源。以吸反力配合特征和分段動能為內核,分析MLAER 性能特征和質量一致性的形成機制,據此建立可同步解決銜鐵中位、動作電壓超差、電壽命不足和質量一致性問題的多目標優化模型。與此同時,為了進一步提高迭代優化過程的效率,本文改進多目標差分進化算法,采用多種群策略、自適應種群權重以及小生境思想,使其更為適合MLAER 優化,避免尋優迭代過程陷入局部最優,保證性能提升與質量一致性設計的精度和效率。本文所提方法的總體流程如圖1 所示。
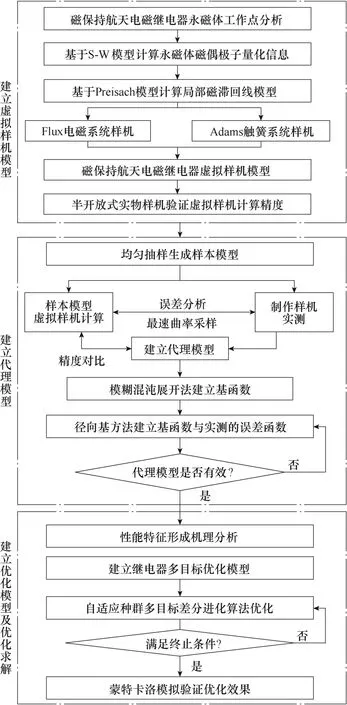
圖1 優化方法總體流程Fig.1 Processes of the design optimization method
1.2 虛擬樣機建模方法
1.2.1 非線性各向異性永磁體工作點分析
永磁體工作點遷移模型示意圖如圖2 所示。當非線性各向異性永磁體充磁飽合時,其工作點位于Q0處,在退磁外磁場作用下,其工作點沿去磁曲線遷移,此時永磁體在繼電器中工作點將會遷移至Q1處,也即充磁時永磁體工作點沿圖2 中回復線進行遷移(綠色線條所示)。同理,退磁時永磁體工作點將會順著第二象限的去磁曲線遷移。若對永磁體進行非飽和退磁,假設退磁到外磁場強度為H軸下方H2處,此時,永磁體的工作點將沿圖2 中非飽合退磁磁滯回線進行遷移(藍色線條所示),使用仿射變換可以計算得到不飽合退磁時的永磁體工作點Q2。
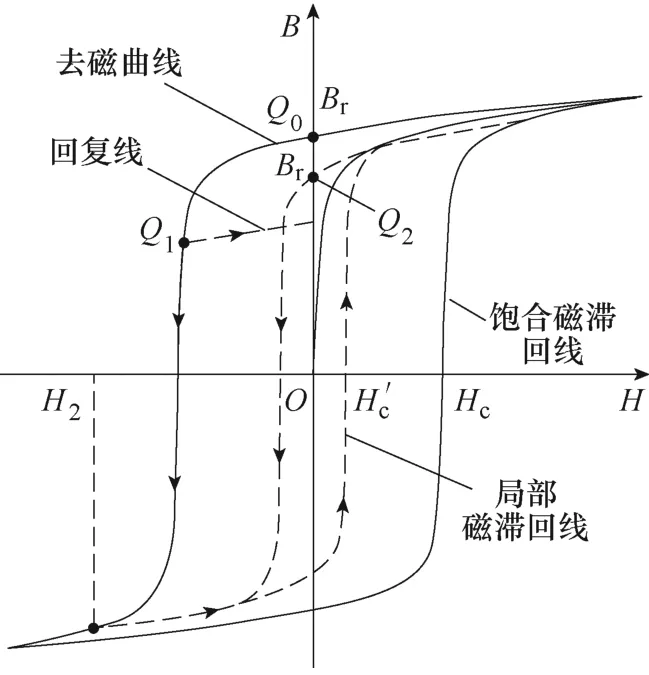
圖2 永磁體工作點遷移模型示意圖Fig.2 The schematic diagram of the permanent magnet working point migration model
1.2.2 非線性各向異性永磁體局部磁滯回線計算
由S-W 方法可知[16],單軸單疇磁性微粒的磁特性可表示為
式中,E為單軸單疇磁性微粒的自由能密度;Kv、MS、H分別為單軸單疇磁性微粒的各向異性磁系數、工作點S=Q2對應的磁化強度及外加磁場的場強;τ為外加磁場與易磁化方向的夾角;θ為工作點對應的磁化強度與易磁化方向的夾角。
由式(1)可知,工作點S=Q2對應的磁偶極子矢量方向可由式(2)求得。
在永磁體工作點對應的磁性微粒磁偶極子矢量方向已知的前提下,使用改進Preisach 模型可知[19],永磁體宏觀磁感應強度B(H)為
式中,Hsat為飽和磁場強度;二元函數μ(α,β)為偶極子正向翻轉閾值α和負向翻轉閾值β的分布密度。
由式(3)可知,永磁體的局部磁滯回線表示為
式中,Bt(H)為極限磁化曲線;Bd(H)為下降支;Bu(H)上升支;B1和H1為偶極子反轉點坐標;為起始于(H2,Q2)上升支局部磁滯回線;為起始于(H2,Q2)下降支局部磁滯回線。
1.2.3 MLER 虛擬樣機模型建立
應用三維建模軟件UG、SOLIDWORKS 等建立繼電器三維零件模型(銜鐵、軛鐵、鐵心、靜觸點、動簧片等)以及裝配樣機模型。在有限元分析軟件Flux 建立MLAER 的電磁吸力特性計算模型,對模型中銜鐵與軛鐵縫隙處進行細分網,空氣球內部其他部分進行粗分網,充退磁后的永磁體賦予1.2.2 節計算得到的局部磁滯回線,鐵磁材料賦予相應的軟磁材料磁化曲線,在立方體邊界設置磁感應線在邊界區域與立方體邊界平行,即將矢量磁位設置為常數0,計算銜鐵長、銜鐵寬、銜鐵厚度、軛鐵厚度、永磁體長、永磁體厚度及永磁體剩磁與電磁吸力之間的關系,實現電磁吸力特征(電磁吸力、磁鏈等)的準確計算。在Ansys 軟件中建立觸簧系統動簧片柔性多體模型,將柔性多體模型導入運動分析軟件Adams 中,設置靜觸點直徑、動簧片厚度、動簧片長度、動簧片寬度、動簧片等效剛度、初壓力、觸點間隙等輸入參數,設置運動邊界條件,實現繼電器銜鐵位移-反力(矩)特征的計算;然后在靜態電磁吸力力矩數據和磁鏈數據的基礎上,在 Matlab/Simulink 搭建繼電器靜/動態特征控制與計算框架,進而實現繼電器虛擬樣機模型的建立,計算繼電器動作電壓、銜鐵是否中位、觸點分斷速度、動作時間和觸點閉合速度等靜動態性能特征。建模與數據交換流程如圖3 所示。制作半開放式實物樣機,實測繼電器動作電壓、吸合時間、釋放時間等性能參數,對比驗證虛擬機樣機計算精度。
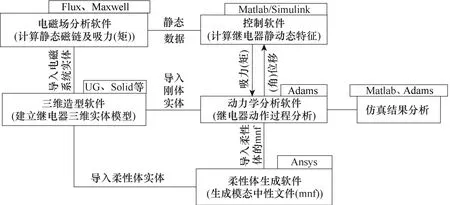
圖3 虛擬樣機建模與數據交換流程Fig.3 Virtual prototype modelling and data exchange process
1.3 代理模型建模方法
代理模型的核心思想是搭建一個隱式或顯式的多項式來代替MLAER 隱藏的結構功能模型。如何提高代理模型的計算精度和效率是實現繼電器性能提升和質量一致性設計的前提。本文針對該類型繼電器非線性強、性能特征過零等特點,提出一種可適用于各類繼電器迭代優化過程的快速計算方法,有
式中,B(·)為基函數,可由模糊混沌展開得到;R(·)為誤差修正函數,可由徑向基函數根據基函數計算與實物樣機測試結果之間的誤差得到。
本文基函數以虛擬樣機模型計算結果為基礎,通過均勻抽樣生成樣本,建立性能特征響應Y和變量參數x1,x2,…,xn之間的量化關系,采用式(6)所示的模糊混沌展開多項式。
式中,P為正交多項式的項數,計算公式為,p為滿足替代建模精度要求的展開階數,p一般取3,5,7。
模糊混沌展開的關鍵在于構建合理的多維Legendre 正交多項式x和高效求解模糊混沌展開的系數φ。本文將x等效為一個與Hermite 類似的多項式,有
式中,φ為整數序列;L可由式(8)所示的遞推關系計算。
展開系數φ為
模糊混沌多項式展開得到的基函數B(·),適用性較強,而且求解繼電器性能特征速度較快,比較適用于計算量大的場景,但模糊混沌方法在計算非線性程度較高MLAER 時誤差較大。對此,本文提出一種基于徑向基函數方法得到的誤差補償函數提高繼電器性能特征的計算精度。
在準確值與基函數的差值滿足白噪聲分布的前提下,計算繼電器性能特征曲率變化情況,確定曲率最速下降區域,制作該區域的實物樣機,并實測性能特征。同時使用基函數計算補償樣本的性能特征,以實測結果與基函數計算結果的差值作為插值節點,關聯相應的函數類型為高斯類型,應用徑向基函數方法得到誤差補償函數R(·)。基函數和誤差補償函數共同構成了本文的代理模型。
1.4 磁保持航天電磁繼電器多目標優化方法
1.4.1 電磁繼電器多目標優化原理
MLAER 兩側吸反力配合特征是對稱的,因此本文僅以吸合位置的左半段性能特征為例進行優化目標與優化原理分析,MLAER 兩側吸反力配合特征示意圖如圖4 所示。
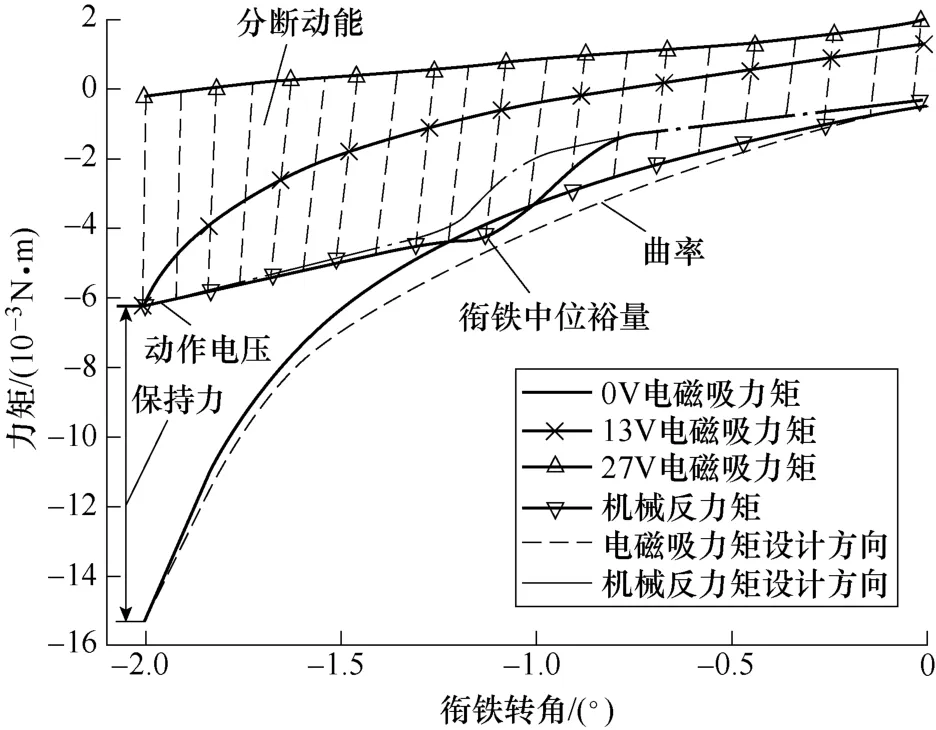
圖4 MLAER 質量特征配合示意圖Fig.4 The schematic diagram of the suction-reverse force characteristic fit about MLAER
可見,MLAER 性能提升與質量一致性設計主要針對其耐力學性能(用保持力表征)、銜鐵中位、動作電壓和電壽命(用分斷速度和分斷動能來表征)。其中,保持力和動作電壓可通過轉角為-2.1 °時的0 V 電磁吸力、某一電壓下的電磁吸力與機械反力做差來計算。
銜鐵無中位即是在所有轉角范圍內0 V 電磁吸力與機械反力僅有平衡位置一個交叉點,可通過適當增大觸簧系統觸點間隙、初壓力和降低觸點超行程、自由行程來優化。此外還可以通過降低0 V 電磁系統的曲率,使電磁吸力與機械反力不發生過早交叉,由于曲率不易直接計算與表征,本文提出0 V吸力曲線形態系數δ,0≤δ≤1,形態系數δ與 0 V電磁吸力曲線的凹凸度成反比,有
式中,MF為永磁體力矩;Mtotal為電磁系統總力矩;,W0為永磁體截面積,W為氣隙總截面積;μr為相對磁導率,,μ為永磁體磁導率,μ0為真空磁磁導率;,Δ1為左側工作氣隙長度,Δ2為右側工作氣隙長度;?為形狀因子,是永磁體的等效內磁導與氣隙磁導之比。
可見,形態系數與永磁體截面積、軛鐵與永磁體距離成反比,與永磁體長度成正比。因此在消除中位設計時可以適當降低永磁體截面積、軛鐵與永磁體距離,增加永磁體長度。
課題組以往研究表明,提高電磁繼電器的觸點分斷速度,可以顯著減弱觸點電侵蝕、提升其電壽命[20]。觸點分斷速度是吸反力配合的結果,難以通過簡單的電磁吸力和機械反力分析獲取,本文考慮分斷速度與繼電器動作過程能量積累之間的關系,采用式(12)所示的分斷動能來量化表征分斷速度,通過提升分斷動能改善MLAER 的電壽命。
式中,ψ為繼電器線圈磁鏈;U、i、R分別為繼電器線圈電壓、電流及電阻;l、ω分別為銜鐵角位移和角速度;Ebreak為繼電器分斷動能;J為銜鐵部分的轉動慣量;ρ、r和dV分別為質量分布連續鋼體的密度、轉動鋼體的轉矩、質量分布連續鋼體的體積元;Fatr(t)為相應時間的吸力值;Fcon(t)為相應時間的反力值;Δl為彈性簧片的位移;ψ0、l0分別為t=0 時刻的線圈磁鏈和銜鐵位移。
可見,MLAER 的分段動能與轉矩、吸力和反力值等相關,要提升其分斷動能可以通過適當增加轉矩、觸點超程、自由程、觸點初壓力和簧片等效剛度,降低觸點間隙、永磁體剩磁等。
1.4.2 電磁繼電器多目標優化尋優方法
上述分析表明,MLAER 多個性能提升之間是相互制約的,因此,在明確性能提升與質量一致性設計技術路徑的同時,還應該研究相應的多目標優化方法,解決多個目標之間的掣肘并提升優化效率。
本文針對差分進化算法在解決多維、強非線性優化問題尋優效率低、精度差的問題,提出自適應種群策略的多目標差分進化算法。采用如式(13)和式(14)所示占優種群與非占優種群不同的變異個數和變異策略的多種群策略。
式中,P*為Pareto最優解集;nMut為該個體變異交叉個體數;N為總的種群個數;G為當前種群代數;Gmax為種群最大代數;? 為常數,。
同時,為了確保尋優解集的均勻性,基于小生境思想對當前種群所有個體的密集程度進行分析與計算,有
2 磁保持型航天電磁繼電器性能提升與質量一致性設計實例
本文針對廣泛應用于運載工具、衛星載荷和星務計算等的雙磁鋼MLAER 存在的銜鐵中位、動作電壓超差和電壽命過低等潛在歸零風險進行優化,綜合提升其性能與質量一致性。該電磁繼電器的電磁系統和接觸系統結構如圖5 所示。
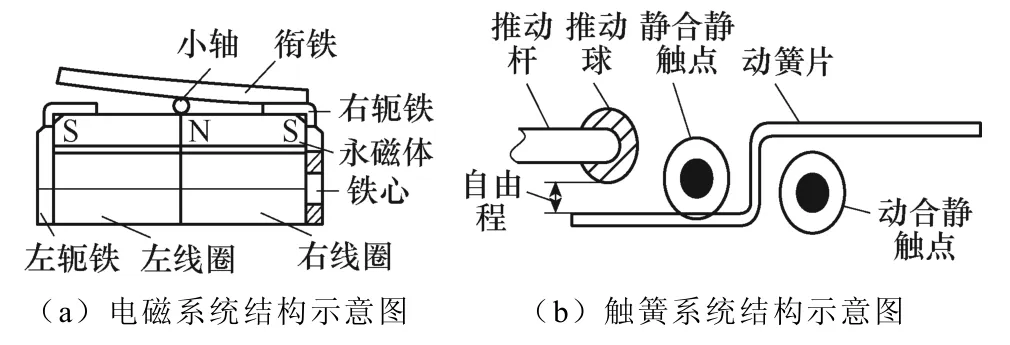
圖5 雙磁鋼MLAER 結構示意圖Fig.5 Schematic of the dual magnet MLAER
該繼電器靜動態虛擬樣機模型如圖6 所示。

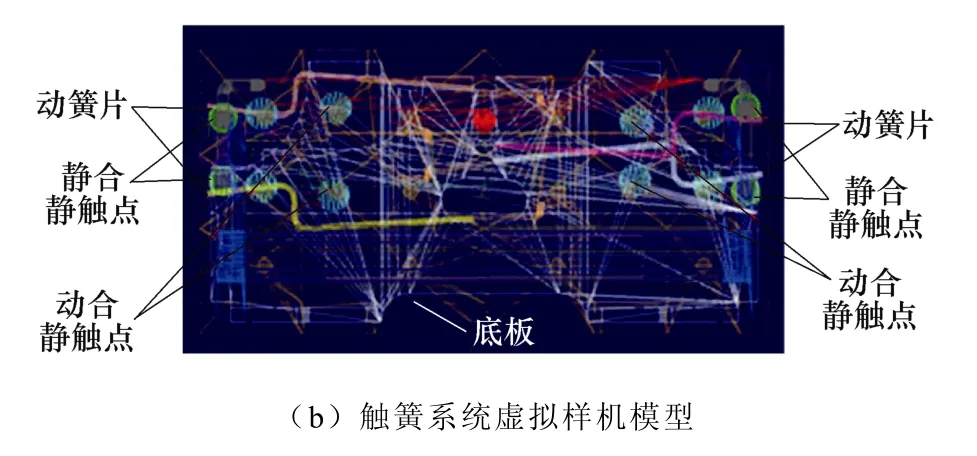
圖6 MLAER 虛擬樣機模型Fig.6 The relay virtual prototype model MLAER
使用圖 2 和圖 3 所示的虛擬樣機模型計算MLAER 的靜態電磁吸力(矩)、機械反力(矩)、動態動作電壓、分斷速度等性能特征,并將計算結果與實測結果進行對比,結果見表1。
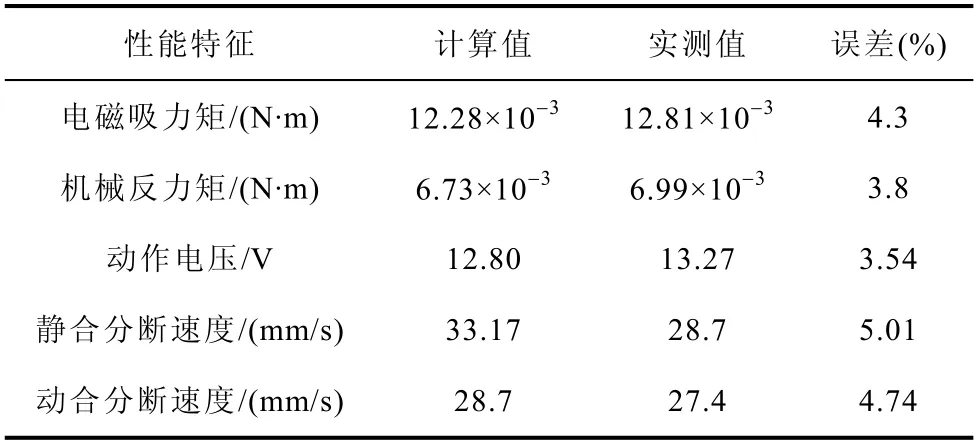
表1 虛擬樣機計算與實測對比結果Tab.1 The comparison results of virtual prototype model with measurement
可見,本文所提方法建立的MLAER 靜動態性能特征最大計算誤差僅為5.01 %,計算精度完全可以滿足MLAER 性能提升與一致性設計的需求。
虛擬樣機計算模型計算結果雖然精度較高,但其每個樣本的計算都要5 h 以上,計算效率較低。采用本文所提的代理模型建立方法,設計參數允許最小值、中心值和最大值為三個水平,使用均勻抽樣建立虛擬樣機模型并計算相應的性能特征,使用模糊混沌展開建立代理模型基函數模型,隨后使用最速曲率下降計算出誤差較大的區域,制作相應的實物樣本。計算基函數與實測結果之間的誤差,使用所提的徑向基函數方法得到代理模型的誤差補償函數模型,以機械反力(矩)和動作電壓(從100臺樣機抽取20 臺將本文模型計算結果與自適應克里金方法進行對比)為例,結果如圖7 所示。靜動態性能特征的計算結果與實測對比見表2。
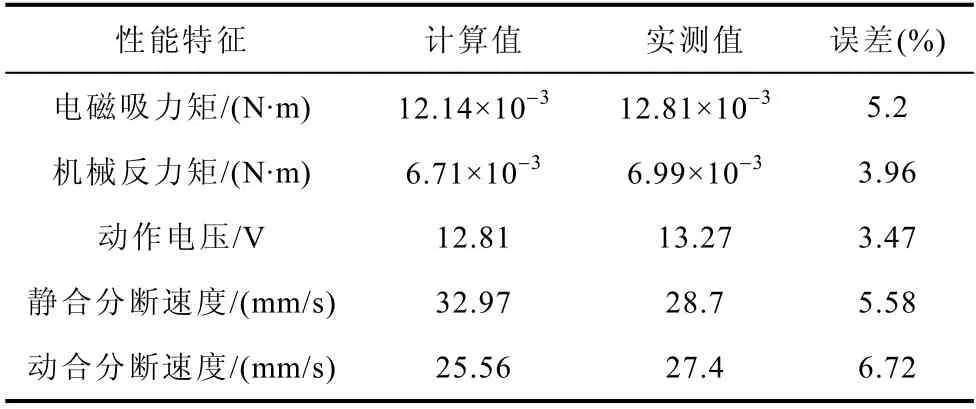
表2 代理模型計算與實測對比結果Tab.2 The comparison results of surrogate model with measurement
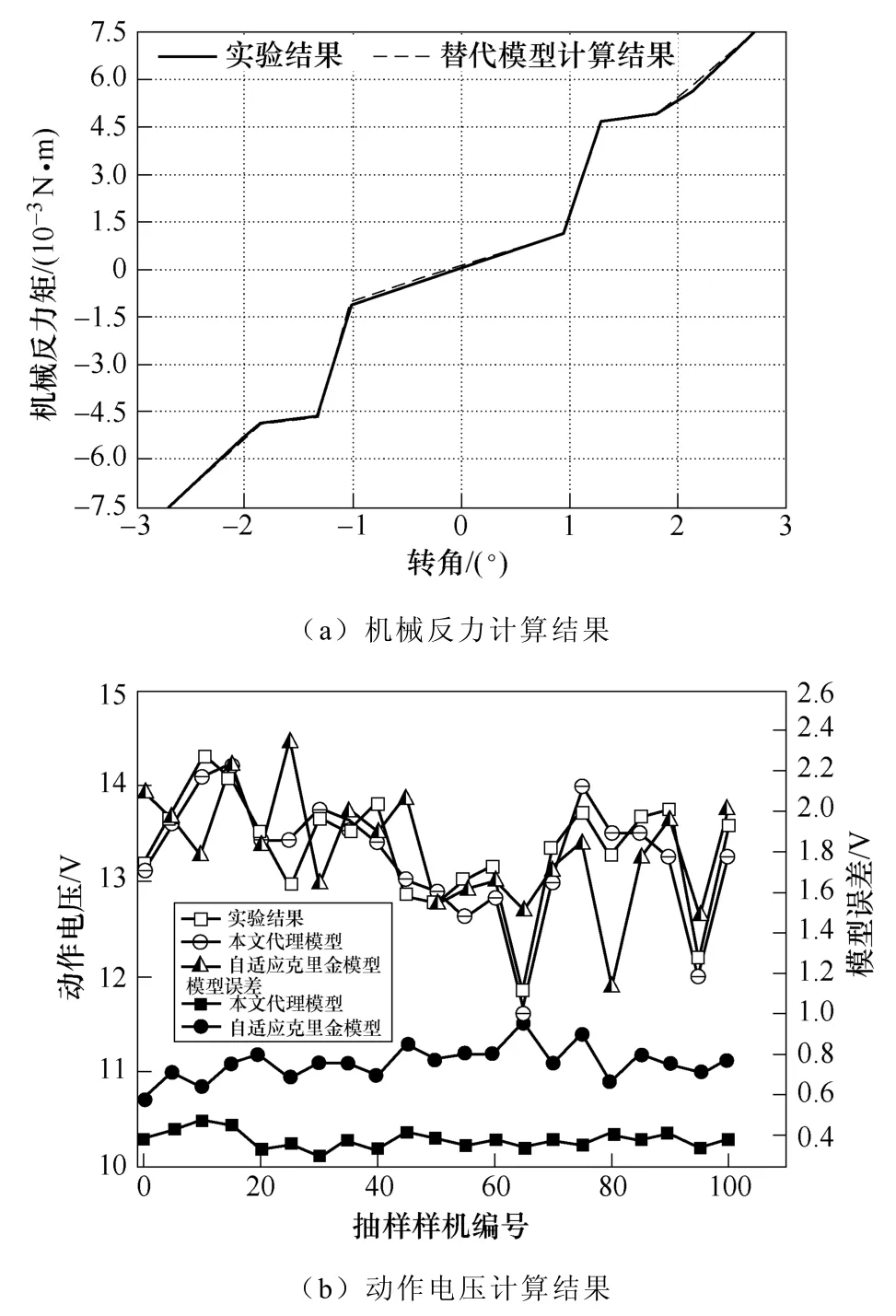
圖7 MLAER 性能參數計算結果對比Fig.7 The comparison of performance parameters results for MLAER
可見,本文所提方法建立的MLAER 靜動態性能特征代理模型最大計算誤差僅為6.72 %,與虛擬樣機模型的計算精度較為接近,但代理模型訓練完成后單個樣本的計算時間為176 s,計算速度與精度可滿足MLAER 性能提升與一致性設計要求。
結合電磁繼電器性能提升與本文研究對象的型譜設計要求,主要優化目標如下:
(4)分斷動能Ebreak同樣是望大特征。
(5)0 V 電磁吸力曲線形態系數δ越小越好,為了提升優化效率,本文將望小特征轉化為望大特征e-δ。
同理,由電磁繼電器性能提升方法可知,該繼電器的主要涉及參數有:銜鐵長度、銜鐵厚度、軛鐵長度、軛鐵厚度、永磁體長度、永磁體寬度、永磁體厚度、永磁體與軛鐵上極面距離、動簧片厚度、動簧片寬度、動簧片長度、觸點間隙、觸點超程、觸點自由程、觸點初壓力、永磁體剩磁、磁間隙。
針對該繼電器質量提升與一致性設計需求,在設計參數允許范圍內,使用改進的自適應種群多目標差分進化算法進行尋優,優化前后設計參數對比見表3。
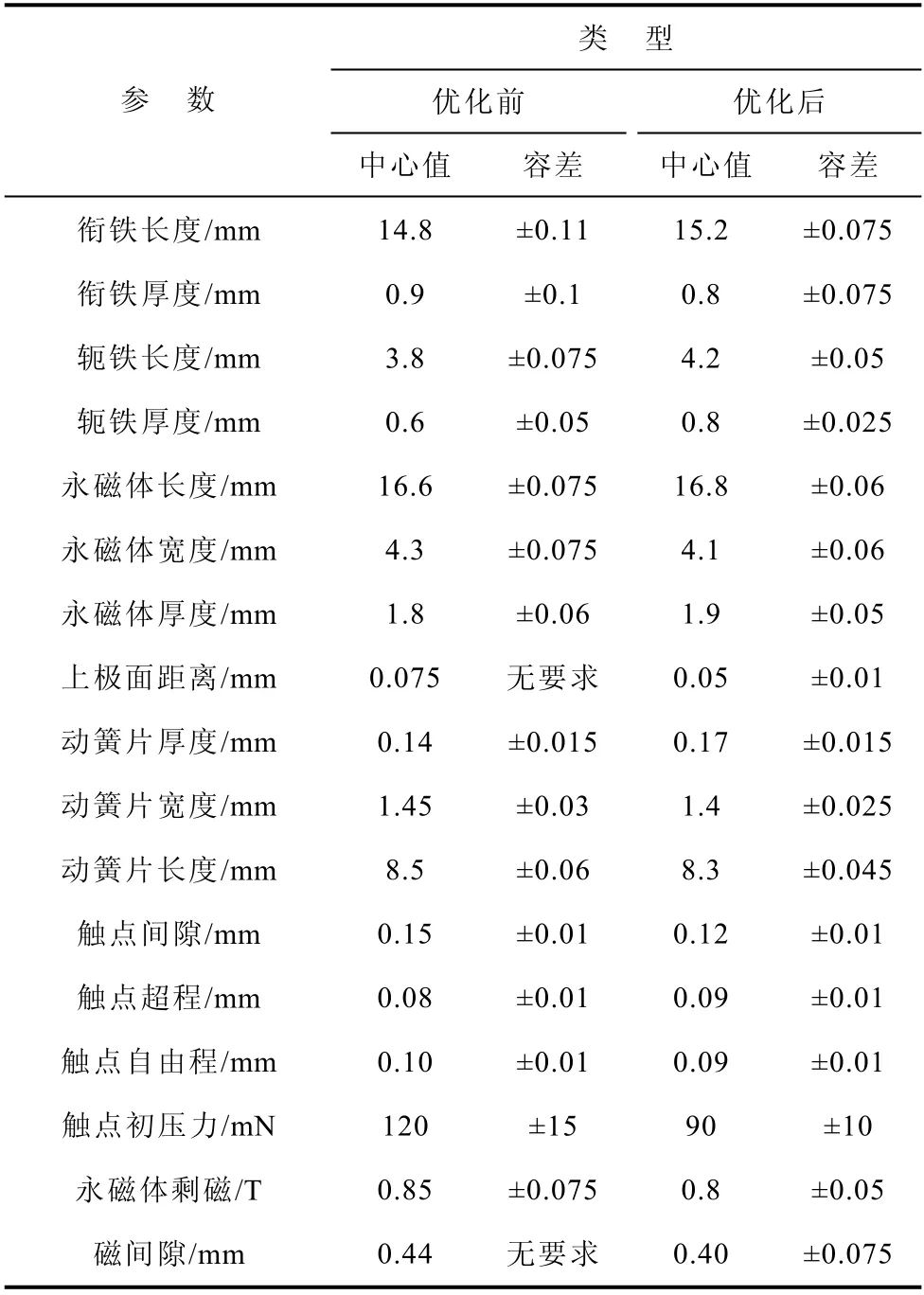
表3 優化前后設計參數對比Tab.3 The comparison of design parameters before and after optimization
優化結果的靜動態性能特征(銜鐵保持力、銜鐵是否中位、動作電壓、靜合觸點分斷速度和動合觸點分斷速度)均值和優化前對比結果見表4。
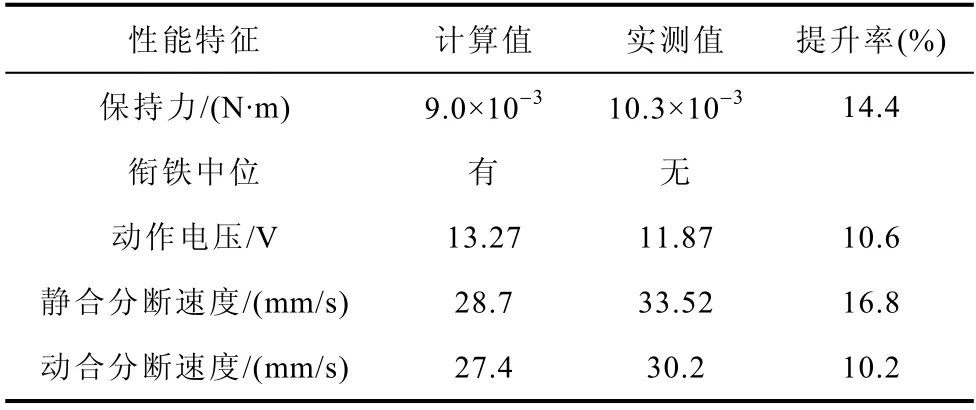
表4 優化前后性能特征對比Tab.4 The comparison of performance characteristics before and after optimization
可見,該繼電器的性能參數在優化后實現了整體提升,其中靜合觸點分斷速度提升高達16.8 %(由28.7 mm/s 提升至33.52 mm/s),提升幅度最小的動合分斷速度也達到了10.2 %,且無中位現象。
為了驗證該繼電器批次產品質量一致性的提升情況,在設計參數容差范圍內使用蒙特卡洛生成虛擬樣本2 000 臺,以動作電壓為例計算性能參數質量一致性的提升幅度,統計結果如圖8 所示。
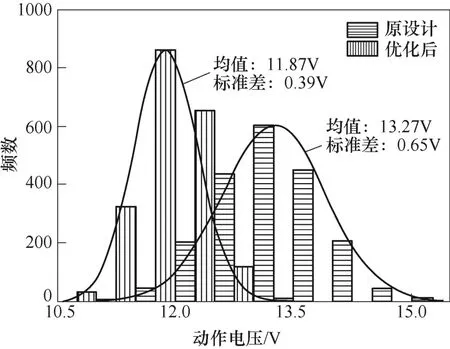
圖8 MLAER 動作電壓一致性提升對比Fig.8 The comparison of MLAER operation voltage consistency improvement
可見,本文所提優化方案在顯著降低批次產品動作電壓均值的同時將動作電壓的質量一致性提升了 40 %(將動作電壓標準差由原始設計的 0.65 V降低至0.39 V)。
在聯合研發廠家的支持下,使用優化方案制作實物樣機100 臺,并使用圖9 所示的繼電器綜合參數測試和耐力學試驗系統,對100 臺物理樣機進行參數測試。測試表明優化后產品無銜鐵中位,耐力學性能滿足 10~3 000 Hz 30 g、動作電壓不高于13 V 的要求,同時統計分析動作電壓分布情況,統計分析結果如圖10 所示。

圖9 MLARE 性能特征試驗平臺Fig.9 Platform for testing the performance characteristics of MLARE
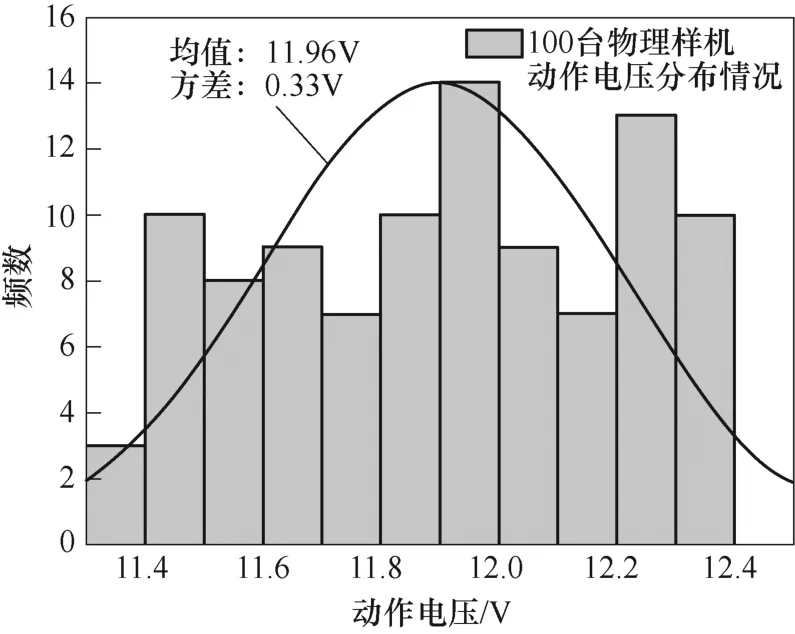
圖10 MLAER 動作電壓分布情況Fig.10 Distribution of operation voltage of batch manufactured physical prototypes of MLARE
可見,批次制造繼電器的動作電壓一致性較好,方差為0.33 V,甚至優于批次虛擬樣機的模擬結果,顯著改善了繼電器性能特征一致性不佳的情況。
3 結論
本文針對有限元忽略非線性各向異性永磁體充退磁效應導致的計算效率低精度差,忽略了設計參數與性能參數之間的作用機理造成的尋優效率較低等問題,開展了體系化研究,取得了以下成果:
1)提出一種可適用于各類繼電器虛擬樣機建模方法,即基于S-W 模型計算非線性各向異性永磁體充退磁后的磁偶極子的矢量化信息,進而使用Preisach 模型得到永磁體局部磁滯曲線,在此基礎上建立繼電器靜動態性能特征虛擬樣機模型,計算得到繼電器的靜動態特征,并將計算結果與實測結果進行比較,最大誤差為5.01 %,分析與計算精度較高,可以滿足本文的優化需求。
2)針對虛擬樣機計算效率低,現有代理模型計算強高維強非線性、存在過零特征性能計算精度差的問題,提出一種適用性強、可用于各類繼電器的快速建模與計算方法,即在少量虛擬樣機模型計算值的基礎上,基于模糊混沌展開建模代理模型基函數,使用徑向基函數方法建立修正實測結果與計算結果之間偏差的誤差補償函數,基函數和誤差補償函數共同構成本文代理模型。將繼電器代理模型計算結果與實測結果進行對比,最大誤差為6.72 %,計算精度與虛擬樣機相近,計算用時不到虛擬樣機模型的1 %(由5 h 降低至176 s)。
3)在代理模型的基礎上,從吸反力配合和分斷動能等角度出發,確定繼電器性能特征形成機制和改進方向,同時為了滿足多目標尋優的需求,改進多目標差分進化算法,提出自適應種群進化策略和基于小生境思想的最優解集篩選策略,可以更均勻更快速地得到最優Pareto 前沿解集組合,一定程度上可以避免迭代尋優過程早熟和陷入局部最優解集,增強解分布的廣泛性和均勻性,保證MLAER多相關性能參數的迭代優化精度和效率。
4)以雙磁鋼差動式MLAER 為驗證對象,對其銜鐵中位、動作電壓超差等潛在歸零故障進行優化設計,給出了設計參數的最佳中心值和容差組合,在解決該繼電器潛在歸零故障的同時將其質量一致性提升了40 %。優化結果驗證了考慮非線性永磁體充退磁效應的虛擬樣機模型、引入實測結果的代理模型以及自適應種群策略的差分進化算法等方法的有效性。
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
房地產導刊(2022年5期)2022-06-01 06:20:14
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
建材發展導向(2021年12期)2021-07-22 08:06:48
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54