串聯(lián)式混合動(dòng)力攪拌車控制策略仿真研究
2023-02-27 03:45:48王魯閩武濤繆雪龍
農(nóng)業(yè)裝備與車輛工程 2023年2期
關(guān)鍵詞:控制策略發(fā)動(dòng)機(jī)
王魯閩,武濤,繆雪龍
(201620 上海市 松江區(qū) 上海工程技術(shù)大學(xué))
0 引言
串聯(lián)式混合動(dòng)力汽車是一種結(jié)構(gòu)相對(duì)簡單的混合動(dòng)力汽車,其發(fā)動(dòng)機(jī)動(dòng)力輸出給發(fā)電機(jī),而不是用以驅(qū)動(dòng)車輛行駛,同時(shí)車輛的動(dòng)力電池可以外接充電設(shè)備,通過電網(wǎng)獲取電能,可以擁有一定距離的純電行駛能力。
串聯(lián)式混合動(dòng)力汽車既能保持傳統(tǒng)燃油車?yán)m(xù)航久的特點(diǎn),又能降低油耗和排放[1-2];相較于燃油車,其發(fā)動(dòng)機(jī)工作平穩(wěn),能有效避免低效區(qū)域[3-5]。對(duì)于串聯(lián)式混合動(dòng)力汽車而言,選擇合適的控制策略尤為重要[6-8]。牛繼高等[9]經(jīng)仿真研究發(fā)現(xiàn)最優(yōu)曲線能量控制策略有助于發(fā)動(dòng)機(jī)的最小化。
現(xiàn)有攪拌車多采用傳統(tǒng)的柴油動(dòng)力,而攪拌車工作時(shí)車輛的運(yùn)行速度不高,有較多停車及怠速情況,發(fā)動(dòng)機(jī)多處于低速低負(fù)荷區(qū)域,效率較低。在節(jié)能減排的大背景下,動(dòng)力系統(tǒng)出現(xiàn)了多元化和電動(dòng)化的趨勢(shì)[10],為提高車輛的燃油利用效率和降低排放,對(duì)攪拌車進(jìn)行新能源開發(fā)和控制策略的合理設(shè)計(jì)尤為重要。
本文對(duì)一型串聯(lián)式混合動(dòng)力攪拌車發(fā)電機(jī)組的發(fā)動(dòng)機(jī)定點(diǎn)控制策略和基于最優(yōu)工作曲線的功率跟隨控制策略進(jìn)行了研究并建立了控制模型,與仿真軟件中建立的整車模型進(jìn)行聯(lián)合仿真驗(yàn)證與比較分析。
1 串聯(lián)式混合動(dòng)力攪拌車結(jié)構(gòu)與基本參數(shù)
1.1 車輛動(dòng)力系統(tǒng)結(jié)構(gòu)
串聯(lián)式混合動(dòng)力攪拌車基本結(jié)構(gòu)如圖1 所示。在本車中發(fā)動(dòng)機(jī)不與傳動(dòng)系統(tǒng)相連,而是通過發(fā)電機(jī)將燃料燃燒產(chǎn)生的能量轉(zhuǎn)化為電能。驅(qū)動(dòng)車輛行駛的動(dòng)力不再由發(fā)動(dòng)機(jī)提供,而是由一臺(tái)驅(qū)動(dòng)電機(jī)提供。與傳統(tǒng)柴油攪拌車相比,從發(fā)動(dòng)機(jī)驅(qū)動(dòng)到液壓馬達(dá)來帶動(dòng)攪拌筒轉(zhuǎn)動(dòng)的動(dòng)力,改變?yōu)閱为?dú)的攪拌電機(jī)來提供。發(fā)電機(jī)產(chǎn)生的電能通過動(dòng)力電池傳遞給驅(qū)動(dòng)電機(jī)與攪拌電機(jī)。

圖1 串聯(lián)式混合動(dòng)力攪拌車動(dòng)力系統(tǒng)結(jié)構(gòu)Fig.1 Power system structure of series hybrid mixer
串聯(lián)式混合動(dòng)力汽車相較于其他混合動(dòng)力車輛,發(fā)動(dòng)機(jī)與傳動(dòng)系統(tǒng)完全解耦,行駛狀況的變化并不直接作用于發(fā)動(dòng)機(jī)的工況,故在動(dòng)力性上與純電動(dòng)汽車更為相似,整車結(jié)構(gòu)與動(dòng)力傳遞路徑也相對(duì)簡單。相比傳統(tǒng)柴油動(dòng)力攪拌車,由于車輛工作時(shí)有較多對(duì)于傳統(tǒng)發(fā)動(dòng)機(jī)工作不利的低車速、低負(fù)荷狀態(tài),串聯(lián)混動(dòng)攪拌車可以使發(fā)動(dòng)機(jī)不受影響地工作于更為高效的區(qū)域,以降低油耗。
1.2 車輛基本參數(shù)
本文研究的串聯(lián)式混合動(dòng)力攪拌車是由一型柴油動(dòng)力攪拌車基礎(chǔ)上開發(fā)而來,該車滿載質(zhì)量25 t,攪拌筒工作容量4.5 m3,其車輛的動(dòng)力系統(tǒng)主要參數(shù)如表1 所示。本文在此車基礎(chǔ)上針對(duì)發(fā)動(dòng)機(jī)的能量控制策略對(duì)串聯(lián)式混合動(dòng)力攪拌車經(jīng)濟(jì)性的影響進(jìn)行仿真研究。

表1 動(dòng)力系統(tǒng)參數(shù)Tab.1 Power system parameters
2 發(fā)動(dòng)機(jī)控制策略的建立
2.1 定點(diǎn)控制策略
發(fā)動(dòng)機(jī)的定點(diǎn)控制策略是基于串聯(lián)式混動(dòng)中發(fā)動(dòng)機(jī)與傳動(dòng)系解耦這一特性,使發(fā)動(dòng)機(jī)始終工作在指定工作點(diǎn)上,是最為簡單高效的控制策略[11]。定點(diǎn)控制策略工作點(diǎn)的選擇通常包括2 種:一種為選擇發(fā)動(dòng)機(jī)最高效的工作點(diǎn),以使發(fā)動(dòng)機(jī)盡可能降低油耗;另一種為選擇發(fā)動(dòng)機(jī)較大功率點(diǎn),以減小發(fā)動(dòng)機(jī)的排量,可控制發(fā)動(dòng)機(jī)的體積與質(zhì)量,但這種工作點(diǎn)效率較低,難以取得較好的節(jié)油效果。
本文中攪拌車使用的發(fā)動(dòng)機(jī)功率較大,選擇發(fā)動(dòng)機(jī)工作于效率較高的1 300 r/min、轉(zhuǎn)矩1 200 N·m處,如圖2 所示。此時(shí)發(fā)動(dòng)機(jī)輸出功率為163 kW,對(duì)應(yīng)永磁同步發(fā)電機(jī)也處于效率95%以上的高效工作區(qū)間。
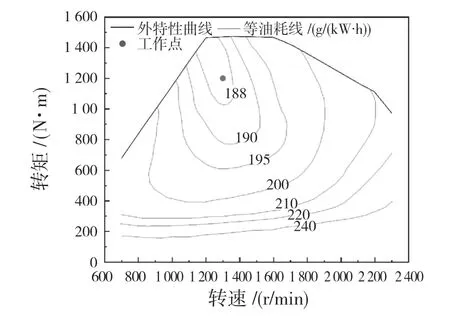
圖2 定點(diǎn)控制策略工作點(diǎn)Fig.2 Working point of fixed-point control strategy
設(shè)定定點(diǎn)控制策略下發(fā)動(dòng)機(jī)開啟的邏輯為SOC值變化觸發(fā)啟停。車輛首先以純電動(dòng)狀態(tài)行駛,當(dāng)SOC 下降到 30%時(shí),發(fā)動(dòng)機(jī)啟動(dòng),帶動(dòng)發(fā)電機(jī)發(fā)電以為車輛提供電能,當(dāng)SOC 上升至60%后,發(fā)動(dòng)機(jī)與發(fā)電機(jī)關(guān)閉。將SOC 控制在30%~60%之間,以避免過度充放電,減少對(duì)電池壽命的損耗。使用MATLAB/Simulink 軟件建立了該定點(diǎn)控制策略的控制模型,如圖3 所示。
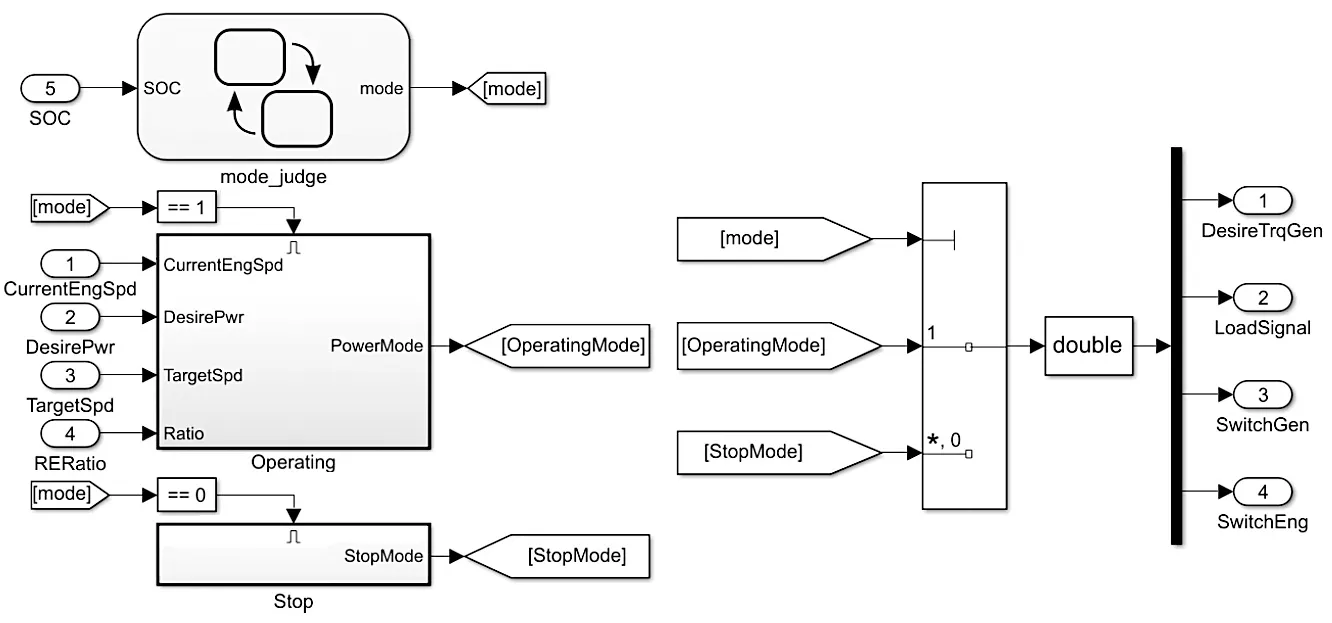
圖3 定點(diǎn)控制策略模型Fig.3 Model of fixed-point control strategy
模型中,電池當(dāng)前SOC 信號(hào)輸入進(jìn)Stateflow 判斷模塊。判定若SOC 低于SOC_min,則令mode=1;若SOC 高于SOC_max,則令mode=0。mode=0 狀態(tài)下,發(fā)動(dòng)機(jī)進(jìn)入停止?fàn)顟B(tài);mode=1 狀態(tài)下,發(fā)動(dòng)機(jī)和發(fā)電機(jī)啟動(dòng)。定點(diǎn)控制策略工作模塊如圖4 所示。通過轉(zhuǎn)速的PID 控制輸出發(fā)動(dòng)機(jī)負(fù)荷信號(hào)使發(fā)動(dòng)機(jī)工作在需求轉(zhuǎn)速,并向發(fā)電機(jī)輸出負(fù)的發(fā)電轉(zhuǎn)矩。當(dāng)發(fā)動(dòng)機(jī)進(jìn)入工作狀態(tài)而轉(zhuǎn)速過低時(shí),先給予發(fā)電機(jī)正的轉(zhuǎn)矩以帶動(dòng)發(fā)動(dòng)機(jī)快速達(dá)到工作轉(zhuǎn)速。

圖4 定點(diǎn)控制策略工作模塊Fig.4 Working Module of fixed-point control strategy
2.2 基于最優(yōu)曲線的功率跟隨控制策略
在最優(yōu)曲線功率跟隨控制策略中,發(fā)動(dòng)機(jī)的工作狀態(tài)沿萬有特性圖上的固定曲線變化,選取的曲線通常為多個(gè)功率下的最佳油耗點(diǎn)構(gòu)成的曲線。隨車輛行駛狀態(tài)的變化,發(fā)動(dòng)機(jī)不斷改變工作點(diǎn)以跟隨車輛需求功率的變化。在該模式下,發(fā)動(dòng)機(jī)產(chǎn)生的功率幾乎全部用于車輛行駛的功率需求和車載耗電器件的功率,有利于改善電池壽命。
在本策略下,以驅(qū)動(dòng)電機(jī)、攪拌電機(jī)和車載用電器的總功率為需求功率,發(fā)電功率跟隨需求功率而變化。發(fā)動(dòng)機(jī)啟動(dòng)同樣以SOC 值變化為基準(zhǔn),在30%~60%之間波動(dòng)。
策略中采用的發(fā)動(dòng)機(jī)工作曲線如圖5 所示。在盡可能使工作點(diǎn)位于同功率下較低油耗的位置的前提下進(jìn)行工作點(diǎn)的選擇。較低功率下,使相近的工作點(diǎn)工作于同一轉(zhuǎn)速下,使工作點(diǎn)盡可能位于高效區(qū)域且使發(fā)動(dòng)機(jī)工作轉(zhuǎn)速穩(wěn)定;高功率下,維持恒轉(zhuǎn)矩以盡量降低轉(zhuǎn)速、高效工作。為使發(fā)動(dòng)機(jī)不至于工作于效率較低的區(qū)域,設(shè)定了工作功率的范圍,上限Pemax取240 kW,下 限Pemin取75 kW。

圖5 發(fā)動(dòng)機(jī)最優(yōu)工作曲線Fig.5 Optimal operating curve of the engine
根據(jù)上述邏輯,使用MATLAB/Simulink 軟件對(duì)基于最優(yōu)曲線的功率跟隨策略建立控制模型,模型形式與圖3 所示的定點(diǎn)控制策略相近。但在工作模塊中(如圖6 所示),以車輛實(shí)時(shí)總需求功率為輸入,由查詢表模塊得到當(dāng)前需求功率對(duì)應(yīng)工作曲線下的轉(zhuǎn)速,并通過PID控制發(fā)動(dòng)機(jī)工作。

圖6 功率跟隨策略工作模塊Fig.6 Working module of power following strategy
3 基于Cruise 軟件的經(jīng)濟(jì)性仿真與分析
3.1 循環(huán)工況與初始設(shè)置
本文用于經(jīng)濟(jì)性仿真的工況為C-WTVC 循環(huán)工況,如圖7 所示。C-WTVC 工況是中國檢驗(yàn)重型商用車燃油經(jīng)濟(jì)性的循環(huán)工況,包括900 s的市區(qū)循環(huán)、468 s的公路循環(huán)和432 s的高速循環(huán)[12]。

圖7 C-WTVC 循環(huán)工況Fig.7 C-WTVC drive cycle
使用Cruise 軟件建立車輛動(dòng)力學(xué)仿真模型。在經(jīng)濟(jì)性仿真過程中,為使負(fù)荷更接近工作負(fù)荷,設(shè)定攪拌車一直處于工作狀態(tài),即攪拌車裝載工作容積的混凝土,質(zhì)量為滿載質(zhì)量,且攪拌電機(jī)始終開啟以使攪拌筒保持旋轉(zhuǎn)。本仿真主要為檢驗(yàn)發(fā)動(dòng)機(jī)控制策略的影響,將SOC 初始值設(shè)定為30%,以使發(fā)動(dòng)機(jī)從循環(huán)開始便進(jìn)入工作狀態(tài)。
3.2 仿真結(jié)果
圖8 為5 個(gè)C-WTVC 工況下基于發(fā)動(dòng)機(jī)定點(diǎn)控制策略的串聯(lián)式混合動(dòng)力攪拌車的電池參數(shù)與發(fā)動(dòng)機(jī)工作變化。圖中可以看到,在工作循環(huán)中出現(xiàn)了多次充放電的情況,電池SOC 值有10 次明顯的波動(dòng),而發(fā)動(dòng)機(jī)工作時(shí)始終工作于設(shè)定的工作點(diǎn)。

圖8 定點(diǎn)控制策略仿真情況Fig.8 Simulation of fixed-point control strategy
圖9為5個(gè)C-WTVC工況下基于發(fā)動(dòng)機(jī)最優(yōu)曲線功率跟隨控制策略的串聯(lián)式混合動(dòng)力攪拌車的電池參數(shù)與發(fā)動(dòng)機(jī)工作變化。工作過程出現(xiàn)了5 次充放電,但波動(dòng)幅度和波動(dòng)次數(shù)明顯少于定點(diǎn)控制策略,反映了制定的功率跟隨策略的發(fā)電功率更接近車輛行駛需求的真實(shí)功率,且能夠降低電池充放電帶來的損失。

圖9 功率跟隨控制策略仿真情況Fig.9 Simulation of power following control strategy
功率跟隨策略下,電池SOC 仍然有較大波動(dòng)的原因如圖10 所示。一個(gè)循環(huán)周期內(nèi)發(fā)動(dòng)機(jī)功率與電池電功率變化情況顯示,在發(fā)動(dòng)機(jī)工作的大部分時(shí)間,電池電功率均大于0,即發(fā)電機(jī)提供的功率大于車輛需求功率,這是由于發(fā)動(dòng)機(jī)工作曲線下限為提高工作效率而選取了較大的75 kW 導(dǎo)致的。
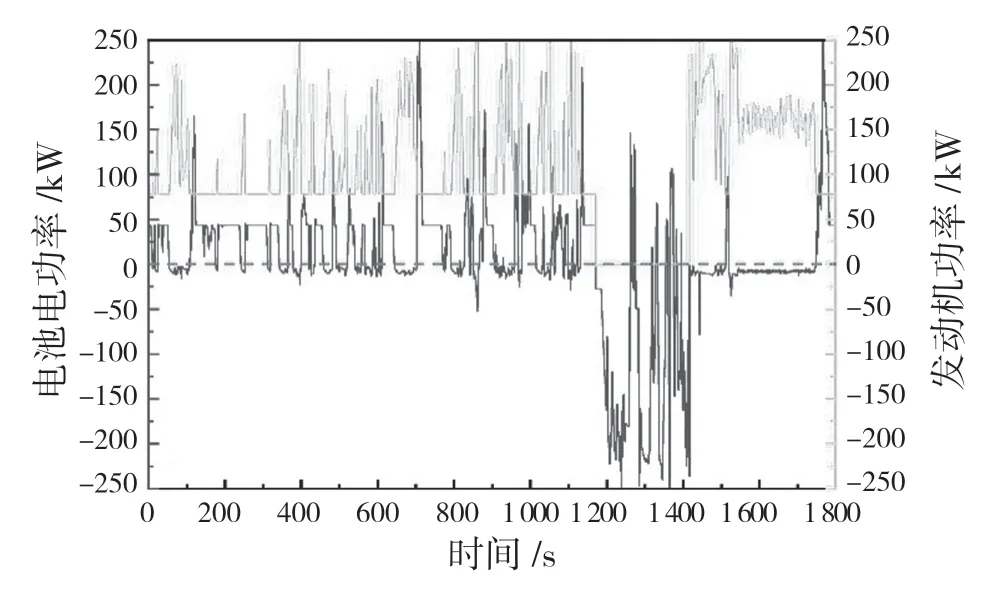
圖10 發(fā)動(dòng)機(jī)功率與電池電功率Fig.10 Engine power and battery electrical power
在5 個(gè)C-WTVC 循環(huán)工況下,發(fā)動(dòng)機(jī)定點(diǎn)控制策略的燃油消耗情況為57.31 L/100km,而功率跟隨策略則為58.40 L/100km,該車采用功率跟隨策略的油耗情況與定點(diǎn)控制策略油耗基本相當(dāng)。
4 結(jié)論
本文根據(jù)某串聯(lián)式混合動(dòng)力攪拌車的工作特點(diǎn),分析了發(fā)動(dòng)機(jī)控制策略,建立了MATLAB/Simulink 控制策略模型,進(jìn)行了整車動(dòng)力學(xué)仿真,分析結(jié)果顯示:(1)該攪拌車采用功率跟隨策略的燃油經(jīng)濟(jì)性與定點(diǎn)控制策略相當(dāng);(2)功率跟隨策略相比定點(diǎn)控制策略能明顯降低電池充放電次數(shù),對(duì)電池壽命更友好;(3)該功率跟隨策略為追求高效率而選取了較高的最低功率點(diǎn),這將發(fā)電功率長期高于需求功率,從而導(dǎo)致電池SOC 值的波動(dòng)。
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
電測(cè)與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動(dòng)力(2014年2期)2014-02-27 12:10:15