基于ADAMS 的某型輕卡操穩(wěn)性分析
2023-02-27 03:45:56袁承麟俞俊
農業(yè)裝備與車輛工程 2023年2期
袁承麟,俞俊
(200093 上海市 上海理工大學 機械工程學院)
0 引言
操縱穩(wěn)定性[1]是衡量車輛行駛安全性能的一個重要參數,操縱穩(wěn)定性良好的汽車能夠根據駕駛員的操作指令及時做出正確的響應,而操穩(wěn)性不合要求的車輛通常無法精準按照駕駛員操作指令行駛,且更容易受到路況、側風等干擾[2]。操穩(wěn)性評價分為主觀評價與客觀評價,基于駕駛員主觀感受的測評屬于主觀評價,運用多體動力學模型,根據操穩(wěn)性試驗標準進行的評價屬于客觀評價。本文重點研究后者。
諸多學者利用多體系統(tǒng)動力學理論對車輛操縱性、動力性等性能的研究碩果累累。秦東晨[3]運用ADAMS/Car 模塊建立了某運動型汽車前懸架與整車的多體模型,進行了主要定位參數影響的性能及動力學性能的仿真,完成前懸架各參數靈敏度分析及性能改進,并提升了整車性能;黃志平[4]利用多體動力學軟件建立的懸架模型類型為五連桿式,并仿真分析五連桿懸架與其他類型懸架性能的差異性。
本文在某輕卡初步設計完成后,建立了整車模型,運用ADAMS 多體模型仿真軟件,并參照國家標準,對仿真結果進行了操縱穩(wěn)定性的評價評分,校核了其操縱穩(wěn)定性符合要求。
1 懸架建立
1.1 前懸架建模
前懸架為麥弗遜式懸架[5],各部件使用剛性體建模,分別為減振器、轉向節(jié)、懸架的控制臂、轉向節(jié)柱、轉向橫拉桿、滑柱、減振器上的螺旋彈簧、以及輪轂。前懸架建模如圖1 所示。
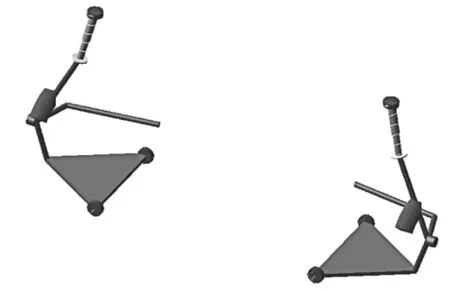
圖1 前懸架建模Fig.1 Front suspension modeling
各部件間的約束類型如表1 所示,減振器實測參數如表2 所示。各子系統(tǒng)創(chuàng)建時坐標與整車XYZ坐標一致。

表1 前懸架各部件間約束Tab.1 Constraints between components of front suspension

表2 減震器特性曲線Tab.2 Shock absorber characteristic curve
1.2 后懸架建模
后懸架為鋼板彈簧懸架,按設計的前卷耳、吊耳與車架的連接位置來確定硬點坐標,并調整鋼板彈簧和軸連接處襯套的線性剛度阻尼及扭轉剛度阻尼,使其與設計參數一致。建立的后懸架模型如圖2 所示。

圖2 后懸架建模Fig.2 Rear suspension modeling
2 整車模型組裝
根據設計的硬點坐標建立轉向系統(tǒng)、制動系統(tǒng)及傳動軸。轉向系統(tǒng)選用齒輪齒條式轉向機。由于不考慮車身氣動效應,只需確保車身質量、質心、轉動慣量等參數與實測一致,即認為該車身滿足操穩(wěn)性仿真需求。在各子系統(tǒng)中建立對應的通訊器,依靠通訊器將各子系統(tǒng)連接起來,組裝成整車模型[6-7]。整車模型如圖3 所示。

圖3 整車模型Fig.3 Full vehicle model
3 操穩(wěn)性仿真
3.1 穩(wěn)態(tài)轉向仿真試驗
汽車以一定的速度沿著直線行駛。在一定的時間內,給方向盤一個固定的角度輸入,車輛變成拐彎狀態(tài),車輛的響應分為2 種:第1 種轉向程度越來越劇烈,轉彎半徑變小,轉向過度,甚至發(fā)生甩尾現(xiàn)象,這就情況就很危險;第2 種是穩(wěn)定轉向。車輛拐彎時具有恒定不變的轉彎半徑。轉向不足也是屬于第2 種情況,雖能保持恒定半徑轉彎,但在有些條件下就會顯得性能不足。轉向不足和轉向過度程度都不能大,盡量接近中性轉向是設計目標。該試驗的目的是研究該型輕卡的穩(wěn)態(tài)橫擺響應規(guī)律,并檢驗其操穩(wěn)性,而約束條件是汽車方向盤轉角輸入成一定穩(wěn)定角度。我國當下主要采用的是固定方向盤轉角的試驗辦法。參照GB/T 6323.6-1994《汽車操縱穩(wěn)定性試驗方法 穩(wěn)態(tài)回轉試驗》,設置上述輕卡模型沿直徑為50 m 的圓周道路行駛,路面狀況設為平坦無坡度,且方向盤的角度是一定的,轉向方向定義為左轉。當側向加速度小于設定值時仿真結束。仿真結果如圖4—圖7 所示。

圖4 側向加速度曲線Fig.4 Lateral acceleration curve
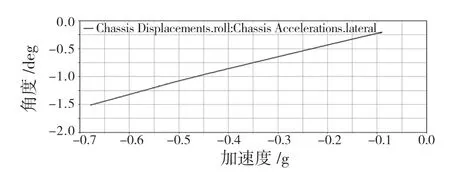
圖5 車身側傾角與側向加速度曲線Fig.5 Body roll angle and lateral acceleration curve

圖6 縱向車速和橫擺角速度曲線Fig.6 Longitudinal velocity and yaw velocity curves

圖7 側傾角曲線Fig.7 Roll curve
依據QC/T 480-1999《汽車操縱穩(wěn)定性指標限值與評價方法 》,對本節(jié)進行的穩(wěn)態(tài)轉向仿真試驗進行評估。按中性轉向點的an(lateral acceleration),U 及 Kφ(其中U 為不足轉向度;Kφ為車身側傾度),3 個參數指標經公式計算推導后,能夠得出分數用來評價本輕卡操穩(wěn)性能否滿足日常平坦路面的要求。
穩(wěn)態(tài)轉向試驗an為中性轉向點,其最大取值為an100=9.8 m/s2,最小取值為an60=5.0 m/s2;U 的取值為U100=0.4 (°)/(m/s2)到U60=1.0 (°)/(m/s2)之前;Kφ的取值為0.7~1.2 (°)/(m/s2),令 Kφ100=0.7 (°)/(m/s2)、Kφ60=1.2 (°)/(m/s2)。
(1)an的評分公式
式中:an——側向加速度。代入參數計算后可得an=7.1 m/s2。則有=81 分。
(2)U 的評分公式
把各數據賦值給式(3)、式(4),計算后可知λ=4。U 的計算需結合前、后軸側偏角的差值,由計算可知U=0.18 (°)/(m/s2)。把各數據代入計算得Nu>100,可按照100 分來算,本輕卡Nu=100 分。
(3)Kφ的評分公式
其中,Kφ計算時參照圖5 的數據曲線,計算得 Kφ=0.25 (°)/(m/s2) 。代入數據計算得出Nφ>100,按照100 分來算,即Nφ=100 分。
(4)穩(wěn)態(tài)轉向仿真試驗需要進行總體性評分,計算公式為:
將各評價指標參數代入式(5)可得NW=94.2分。由評分可知,該輕卡穩(wěn)態(tài)回轉性能良好,設計符合要求。
3.2 Ramp steer 轉向斜坡輸入
轉向斜坡輸入仿真可用來考察車輛時域上的瞬態(tài)響應特性。仿真設置輕卡先沿直線行駛,緊接著方向盤開始以均勻角速度朝左邊轉動,汽車轉向越來越劇烈。在此過程中,該輕卡表現(xiàn)穩(wěn)定,能夠完成轉向,幾乎沒有轉向不足或是轉向過度的情況。仿真結果如圖8—圖11 所示。如圖9 所示的結果表明轉向響應很及時,側傾角小,操穩(wěn)性表現(xiàn)良好。

圖8 轉向盤轉角變化曲線Fig.8 Curve of steering wheel angle’s change

圖9 側偏角變化曲線Fig.9 Curve of sideslip’s change

圖10 橫擺角速度變化曲線Fig.10 Curve of yaw velocity’s change

圖11 側向加速度變化曲線Fig.11 Curve of lateral acceleration’s change
除上述穩(wěn)態(tài)轉向及轉向斜坡輸入試驗,該輕卡還經過了漂移試驗、角階躍試驗、角脈沖試驗、蛇形轉向等仿真試驗,根據操穩(wěn)性試驗標準,該車操穩(wěn)性整體滿足要求,部分路況評分較高,表明該車的前、后懸架硬點坐標等設計良好,使其擁有較好的k 特性[8],而且減震器等參數設計較好,c 特性滿足要求。
4 結語
本文建立多體動力學模型,在設計數據凍結前利用ADAMS 仿真的方式校核了該車型的操作穩(wěn)定性,具體結論如下:
(1)分別建立麥弗遜式前懸架和鋼板彈簧式后懸架,并結合其他關鍵子系統(tǒng)建立輕卡多體動力學模型,為相似車型的建模提供參考。
(2)對輕卡進行了穩(wěn)態(tài)轉向及轉向斜坡輸入試驗等仿真試驗,根據仿真輸出數據曲線及整車操縱穩(wěn)定性試驗國家標準,對該輕卡的操縱穩(wěn)定性作出評分及評價,結果表明該車表現(xiàn)良好,操穩(wěn)性滿足要求。
本文可為該型輕卡的操穩(wěn)性能試驗提供參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫(yī)藥現(xiàn)代化(2021年10期)2021-03-02 05:52:06
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51