基于動(dòng)態(tài)規(guī)劃的城市客車擋位決策優(yōu)化方法研究
2023-02-27 03:45:22章俊王洪亮王爾烈皮大偉王顯會(huì)
農(nóng)業(yè)裝備與車輛工程 2023年2期
章俊,王洪亮,王爾烈,皮大偉,王顯會(huì)
(210094 江蘇省 南京市 南京理工大學(xué) 機(jī)械工程學(xué)院車輛工程系)
0 引言
傳統(tǒng)自動(dòng)變速器控制系統(tǒng)是根據(jù)駕駛員操作和車輛運(yùn)行狀態(tài)進(jìn)行單一固定的擋位切換,不能根據(jù)實(shí)時(shí)的交通狀況進(jìn)行動(dòng)態(tài)調(diào)整,大大增加了燃油消耗量[1-2]。
通過擋位決策優(yōu)化以達(dá)到提高燃油經(jīng)濟(jì)性目標(biāo)的本質(zhì)是通過換擋決策來影響發(fā)動(dòng)機(jī)工作點(diǎn),進(jìn)而降低燃油消耗[3]。國內(nèi)外學(xué)者從這一角度出發(fā),主要使用動(dòng)態(tài)規(guī)劃算法(Dynamic Programming,DP)、進(jìn)化算法(Evolutionary Algorithms,EA)和混雜系統(tǒng)理論進(jìn)行擋位決策優(yōu)化。2002 年,Kolmanovsky 等[4]提出了一種基于隨機(jī)動(dòng)態(tài)規(guī)劃的汽車動(dòng)力總成系統(tǒng)最優(yōu)運(yùn)行策略求解方法,其目標(biāo)是將燃料消耗和尾氣排放降至最低;Kim[5]提出了基于DP 算法對電子節(jié)氣門控制和動(dòng)力傳動(dòng)系統(tǒng)進(jìn)行優(yōu)化,相比原有擋位決策具有更好的駕駛性和燃油經(jīng)濟(jì)性,并且比傳統(tǒng)獲取擋位切換MAP 更靈活簡便。
與傳統(tǒng)方法不同的是,最小化不是針對一個(gè)預(yù)定循環(huán)工況,而是在來自底層馬爾可夫鏈驅(qū)動(dòng)循環(huán)發(fā)生器的一類軌跡上的隨機(jī)“平均”意義上執(zhí)行的,該方法更適用于在線優(yōu)化。劉暢[6]針對中國典型城市工況,以電動(dòng)客車能量回收為目標(biāo)設(shè)計(jì)了DP 算法,但是在算法設(shè)計(jì)過程中未作出相應(yīng)約束和優(yōu)化。
為了達(dá)到油耗或能耗最優(yōu),會(huì)導(dǎo)致頻繁換擋、意外升擋等現(xiàn)象。基于EA 算法目前使用較多的是遺傳算法(Genetic Algorithm,GA)。Saini 等[7]在傳統(tǒng)GA 算法的基礎(chǔ)上進(jìn)行改進(jìn),采用了帶精英策略的非支配排序,以單位距離能耗作為經(jīng)濟(jì)性目標(biāo)函數(shù)、速度跟蹤誤差作為動(dòng)力性目標(biāo)函數(shù),最終得到有良好綜合性能的擋位決策M(jìn)AP;高子茵等[8]采用0~30 km/h 的加速時(shí)間為優(yōu)化目標(biāo)的GA 算法進(jìn)行換擋點(diǎn)優(yōu)化,通過驗(yàn)證該算法能夠有效提高動(dòng)力性的同時(shí)能保證一定的燃油經(jīng)濟(jì)性。
混雜系統(tǒng)指的是系統(tǒng)內(nèi)同時(shí)含有離散和聯(lián)系狀態(tài),并且相互影響、相互作用,其本質(zhì)是復(fù)雜非線性系統(tǒng)[9]。李升波[10]認(rèn)為,有級式自動(dòng)變速器擋位決策中含有離散型變量,且狀態(tài)方程、性能指標(biāo)具有強(qiáng)非線性。提出基于Legendre 偽譜拼接法求解換擋點(diǎn)的方法,并進(jìn)行仿真,驗(yàn)證該方法對車輛節(jié)油的有效性;He 等[11]將車輛縱向動(dòng)力學(xué)建模為混雜系統(tǒng),提出了一種基于優(yōu)化的擋位決策方法,并通過李雅普諾夫函數(shù)驗(yàn)證該系統(tǒng)的穩(wěn)定性,制定了重型車輛的擋位決策M(jìn)AP。
本文結(jié)合城市客車具有固定站點(diǎn)、固定線路的特點(diǎn),以提高燃油經(jīng)濟(jì)性為目標(biāo),從不同交通狀況對應(yīng)不同換擋規(guī)律角度,解決傳統(tǒng)城市客車擋位決策方法難以適應(yīng)不同工況的問題。本文主要內(nèi)容有:(1)采用主成分分析、聚類分析對該線路工況進(jìn)行分類和構(gòu)建;(2)采用含不同懲罰因子的動(dòng)態(tài)規(guī)劃算法,求解不同工況下的最優(yōu)擋位決策序列,提取適應(yīng)不同工況的換擋規(guī)律;(3)在綜合線路工況下,與傳統(tǒng)換擋規(guī)律進(jìn)行仿真對比。
1 線路工況構(gòu)建
常用的工況構(gòu)建方法有行程分析法、V-A 矩陣分析法、定步長截取法和馬爾科夫法[12]。本文采用行程分析法將城市客車兩個(gè)怠速狀態(tài)之間的車速區(qū)間劃分成為運(yùn)動(dòng)學(xué)片段,分割產(chǎn)生了3 483 個(gè)運(yùn)動(dòng)學(xué)片段。
1.1 主成分分析
為了正確描述公交車運(yùn)行工況,本文選擇3 類使用頻率較高、能夠反映城市客車線路運(yùn)行的特征參數(shù):表征城市公交車速特點(diǎn)——平均速度、平均行駛速度、速度標(biāo)準(zhǔn)差以及最高車速;表征加、減速特點(diǎn)——最大加速度、平均加速度、最大減速度、平均減速度、加速度標(biāo)準(zhǔn)差;表征片段長度特點(diǎn)——加速時(shí)間比、減速時(shí)間比、怠速時(shí)間比、片段持續(xù)時(shí)間、巡航時(shí)間比以及行駛路程。在能夠保證原始數(shù)據(jù)信息盡量完整的前提下,利用主成分分析方法,將初始的15 個(gè)特征參數(shù)通過線性組合得到少數(shù)相互獨(dú)立的新變量。對該15 個(gè)特征參數(shù)按主成分分析,得到少數(shù)相互獨(dú)立的新變量,分析步驟為:(1)各片段特征參數(shù)值進(jìn)行標(biāo)準(zhǔn)化處理;(2)計(jì)算相關(guān)系數(shù)矩陣;(3)計(jì)算相關(guān)系數(shù)矩陣的特征值和特征向量;(4)計(jì)算累計(jì)貢獻(xiàn)率。
通過對3 483 個(gè)片段的特征參數(shù)進(jìn)行上述步驟的處理,得到15 個(gè)主成分。由圖1 可見,前5 個(gè)主成分累計(jì)貢獻(xiàn)率已經(jīng)超過90%,可以代替原來的15個(gè)特征參數(shù)表征該線路上的大部分運(yùn)行特征。

圖1 累計(jì)貢獻(xiàn)率Fig.1 Cumulative contribution rate
1.2 聚類分析
為了后續(xù)分析,需要相近特征的運(yùn)行片段歸為同一類,本文選擇動(dòng)態(tài)聚類中的K-means 聚類分析方法,分析步驟:(1)首先確定聚類因子和初始聚點(diǎn)。聚類因子選用前5 主成分,初始聚點(diǎn)以最大最小原則進(jìn)行選取;(2)按照歐式距離定義兩點(diǎn)之間距離,以每個(gè)運(yùn)動(dòng)片段距離初始聚點(diǎn)最近為原則進(jìn)行初始分類;(3)再次計(jì)算聚類中心;(4)不斷重復(fù)以上步驟,直至聚類中心不再發(fā)生變化。
根據(jù)步驟(1)~步驟(4),該線路上的工況分為3 類,將該3 類工況的加速時(shí)間比例、巡航時(shí)間比例和怠速時(shí)間比例繪制成三維點(diǎn)圖,各個(gè)速度段的比例繪制成柱狀圖,如圖2 所示。
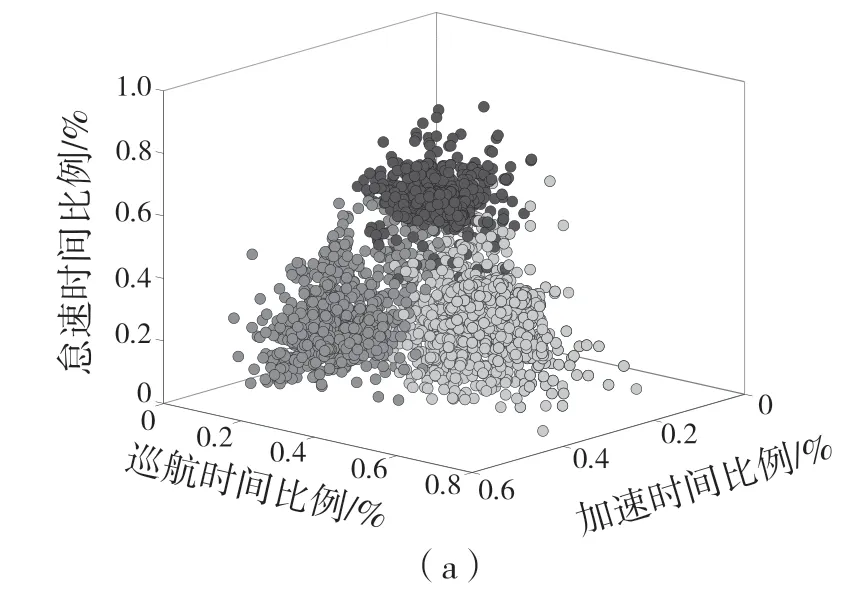
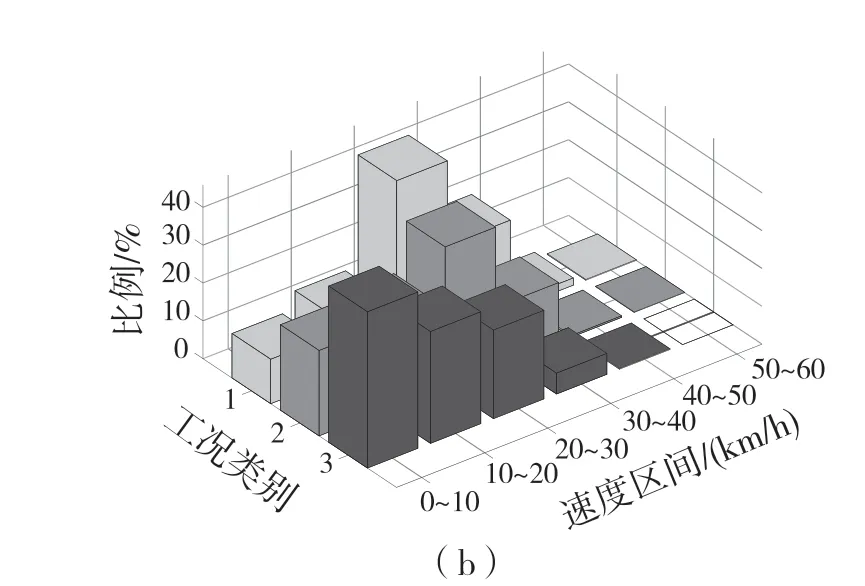
圖2 聚類結(jié)果Fig.2 Clustering results
3 類工況分別占比43.58%、26.02%、30.40%。第1 類工況的工況怠速時(shí)間比例最低,巡航時(shí)間比例高且行駛速度主要分布在[30,50]速度區(qū)間內(nèi)。
將第1 類工況表征該線路上的暢通工況;將第2 類工況表征一般暢通工況。第2 類工況的怠速時(shí)間比例中等,加速時(shí)間要多于第1 類工況,行駛速度主要在中速區(qū)間內(nèi);將第3 類工況表征擁堵工況。第3 類工況的怠速時(shí)間比例最高,且行駛速度主要分布在[0,30]速度區(qū)間內(nèi)。
1.3 工況構(gòu)建
本文定義偏差量bias 這一指標(biāo)來選擇合適的運(yùn)動(dòng)學(xué)片段進(jìn)行工況構(gòu)建。偏差量bias 可以反映各片段與其所屬類整體類的契合程度,其值越靠小,說明兩者之間越契合。偏差量bias 公式表示為:
式中:xi,j、xi,k,j——第i 類工況的第j 個(gè)整體平均特征參數(shù)值、第i 類工況中第k 個(gè)運(yùn)動(dòng)學(xué)片段的第j 個(gè)特征參數(shù)值,i=1,2,3,j=1,2,…,15。
將3 483 個(gè)運(yùn)動(dòng)學(xué)片段按照類別分成3 個(gè)數(shù)據(jù)樣本,選取偏差量較小的每一類各10 個(gè)運(yùn)動(dòng)學(xué)片段進(jìn)行工況構(gòu)建,結(jié)果如圖3 所示。

圖3 各類工況構(gòu)建Fig.3 Construction of different working conditions
2 不同工況下基于動(dòng)態(tài)規(guī)劃的換擋規(guī)律提取
2.1 擋位決策動(dòng)態(tài)規(guī)劃問題建立
每一時(shí)刻的換擋點(diǎn)對當(dāng)前城市客車行駛狀態(tài)以及燃油消耗量有著重要影響,可將城市客車運(yùn)行中擋位決策優(yōu)化問題分解為多階段的最優(yōu)求解[13]。本文采用動(dòng)態(tài)規(guī)劃進(jìn)行擋位決策,求解步驟如下:
(1)階段劃分:對于時(shí)間長度為T 的某線路工況,將其分為N 個(gè)時(shí)間長度為Δt 的離散階段。
(2)選擇狀態(tài)變量和決策變量:第k+1 級狀態(tài)變量為發(fā)動(dòng)機(jī)轉(zhuǎn)速ne(k)、實(shí)時(shí)車速ua(k)和城市客車當(dāng)前所處于的擋位狀態(tài)ng(k),第k+1 級決策變量為換擋指令ug(k)和節(jié)氣門開度α(k)。
在給定的線路工況中,各時(shí)刻的車速已知,根據(jù)當(dāng)前時(shí)刻的城市客車參數(shù)即可求出以下參數(shù):發(fā)動(dòng)機(jī)轉(zhuǎn)速、需求轉(zhuǎn)矩。另外,由發(fā)動(dòng)機(jī)外特性可知,由發(fā)動(dòng)機(jī)轉(zhuǎn)速和發(fā)動(dòng)機(jī)轉(zhuǎn)矩得到當(dāng)前階段的節(jié)氣門開度。
因此,此時(shí)最優(yōu)擋位問題中的唯一狀態(tài)變量為擋位狀態(tài)ng(k),唯一決策變量為換擋指令ng(k)。
(3)狀態(tài)變量轉(zhuǎn)移方程:本文研究的城市客車采用5 擋自動(dòng)變速器,如果不考慮特殊情況(如跳擋),只允許相鄰兩擋之間進(jìn)行升降擋的情況下,則狀態(tài)變量的轉(zhuǎn)移方程為:
(4)確定動(dòng)態(tài)規(guī)劃優(yōu)化指標(biāo)函數(shù)
每個(gè)階段的發(fā)動(dòng)機(jī)燃油消耗量為:
式中Qt(k)與發(fā)動(dòng)機(jī)轉(zhuǎn)速ne(k)和節(jié)氣門開度α(k)有關(guān)。
在確定某一循環(huán)線路離散階段數(shù)為N 的情況下,通過選取不同階段換擋序列,使得城市客車在該循環(huán)中所消耗的燃油量Jfuel取得最小值:
進(jìn)一步地,有級自動(dòng)變速器動(dòng)態(tài)規(guī)劃擋位決策遞推方程為:
(5)設(shè)置約束條件
對發(fā)動(dòng)機(jī)而言,在動(dòng)態(tài)優(yōu)化過程中,發(fā)動(dòng)機(jī)輸出轉(zhuǎn)矩在有效轉(zhuǎn)矩范圍內(nèi),發(fā)動(dòng)機(jī)轉(zhuǎn)速需要保證在最小穩(wěn)定轉(zhuǎn)速到最大安全轉(zhuǎn)速范圍內(nèi)。該城市客車采用5 擋自動(dòng)變速箱,則擋位狀態(tài)ng(k)約束為:
對決策變量ng(k)而言,其約束為:
2.2 擋位決策動(dòng)態(tài)規(guī)劃問題改進(jìn)
考慮換擋間隔,采用計(jì)數(shù)器來設(shè)置兩次擋位切換的間隔,在仿真中步長為0.2 s,設(shè)置如下約束:
另外,本論文增加離合器摩擦損失作為懲罰因子,因此就需要考慮換擋過程中的滑摩功[14],其計(jì)算公式為:
式中:W——滑摩功,J;Tc(t)——離合器主、從動(dòng)盤之間的摩擦力矩,N·m;Δωc——離合器主、從動(dòng)盤之間的角速度差,rad/s;t1-t0——滑摩時(shí)間,s。
因此優(yōu)化指標(biāo)函數(shù)在增加懲罰因子之后可改寫為
式中:Ef——柴油熱值,J/g,一般取46 040 J/g;β——權(quán)重系數(shù),針對不同類型線路循環(huán)選取不同的值。當(dāng)β=0 時(shí),經(jīng)濟(jì)性最佳;當(dāng)β=1 時(shí),動(dòng)力性最佳。
2.3 擋位決策動(dòng)態(tài)規(guī)劃問題求解
在暢通工況中,城市客車的運(yùn)行道路情況較好,巡航時(shí)間比例也比較高,在該類工況下應(yīng)更強(qiáng)調(diào)經(jīng)濟(jì)性,對于性能的需求較小,取β=0.2;在擁堵工況中,城市客車行駛環(huán)境復(fù)雜,頻繁啟停,在考慮經(jīng)濟(jì)性優(yōu)化目標(biāo)的同時(shí)又需要強(qiáng)調(diào)一定的城市客車機(jī)動(dòng)性,因此取β=0.8;對于一般暢通工況,選取中間值β=0.5。以車速為橫坐標(biāo)、節(jié)氣門開度為縱坐標(biāo),將不同工況下的最優(yōu)的升檔切換工作點(diǎn)繪制在同一坐標(biāo)圖上,結(jié)果如圖4 所示。
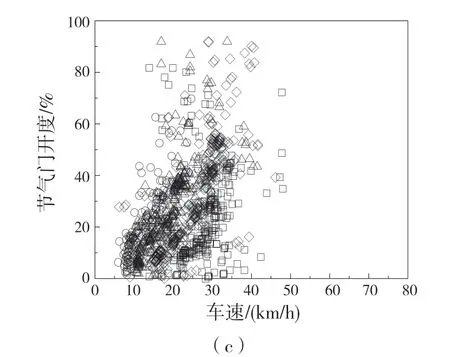
圖4 不同工況下升擋點(diǎn)分布Fig.4 Distribution of upshift points under different working conditions
2.4 不同工況下?lián)Q擋規(guī)律提取
對前文動(dòng)態(tài)規(guī)劃得到的線路換擋序列采用聚類分析,提取出不同工況下的升擋線。由圖4 中升擋點(diǎn)可以發(fā)現(xiàn),缺少了在節(jié)氣門開度較大時(shí)(大部分>60%)的升擋線部分。節(jié)氣門開度大即代表加速踏板開度大,有較強(qiáng)的加速或超車等意圖,而本論文中各換擋點(diǎn)是根據(jù)動(dòng)態(tài)規(guī)劃以節(jié)油為目標(biāo)進(jìn)行優(yōu)化得到,因此對于大油門部分的升擋線采用對原有趨勢進(jìn)行延伸。另外,對于降擋線的選取,采用等延遲型策略,延遲間隔為-3 km/h。所得到的基于動(dòng)態(tài)規(guī)劃的靜態(tài)最優(yōu)換擋規(guī)律如圖5 所示。
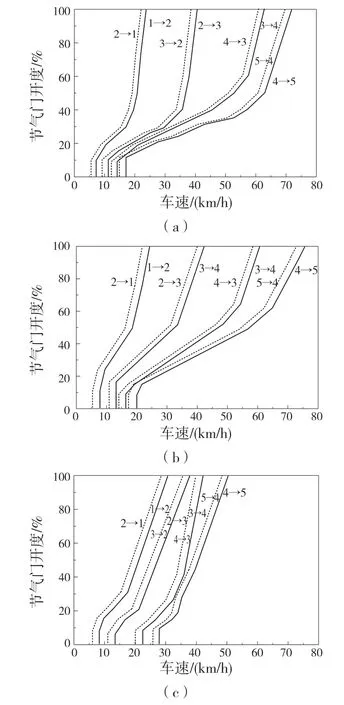
圖5 換擋規(guī)律提取Fig.5 Extraction of optimal shift schedules
3 仿真驗(yàn)證
擋位決策整體模型包括駕駛員模塊、發(fā)動(dòng)機(jī)模塊、液力變矩器模塊、變速器模塊、擋位決策模塊、整車模塊,因此只有該仿真模型具有較強(qiáng)的車速跟隨可靠性才能較真實(shí)反映城市客車線路運(yùn)行狀態(tài)。驗(yàn)證結(jié)果如圖6 所示。
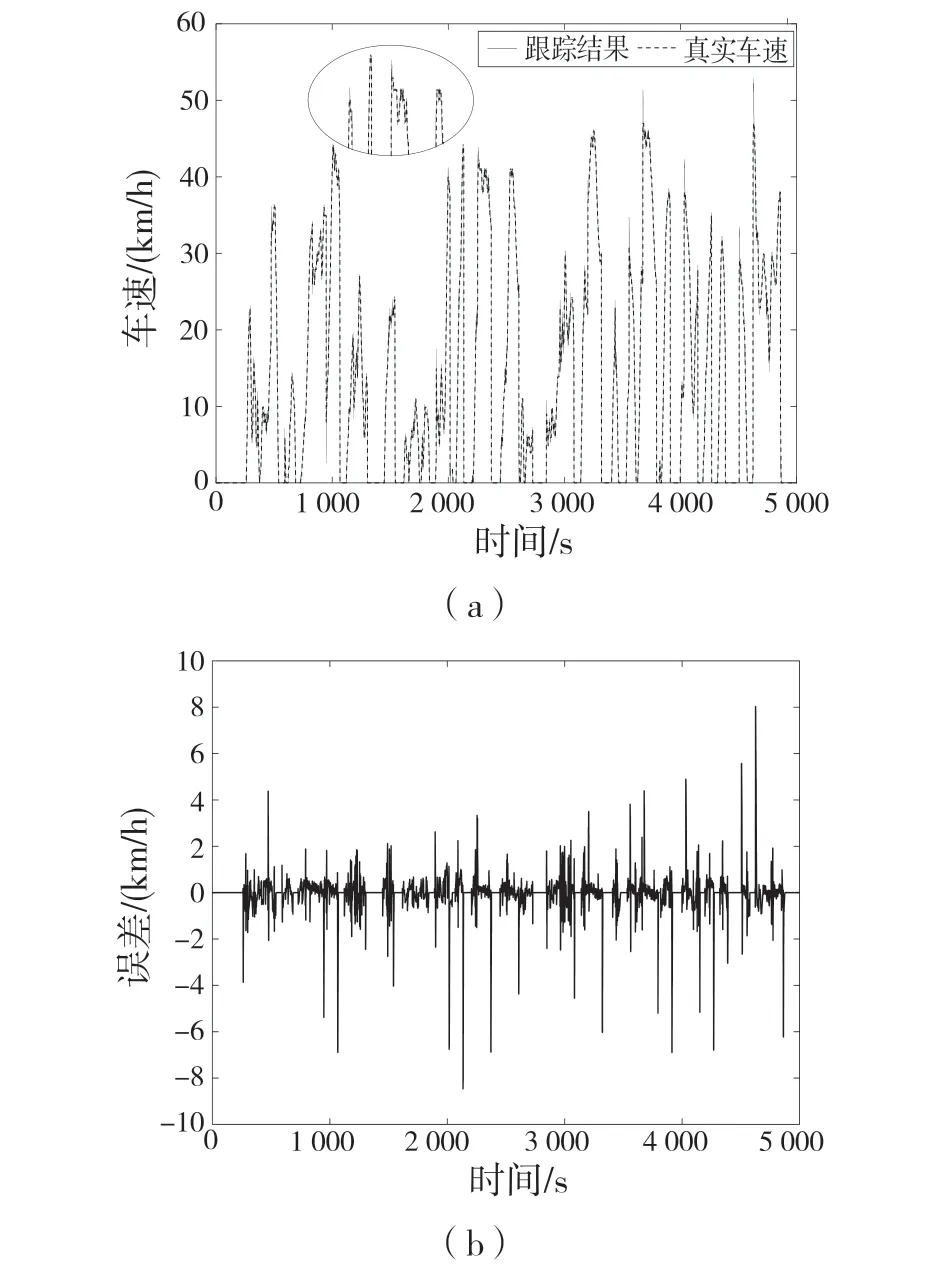
圖6 車速跟隨驗(yàn)證Fig.6 Speed following verification
可以看出,除個(gè)別尖點(diǎn)處外,其他時(shí)刻誤差在仿真車速能基本上可以跟隨目標(biāo)車速,所搭建的模型能有效反應(yīng)城市客車的狀態(tài)。
為了更真實(shí)地反映線路情況,將所構(gòu)建的暢通工況、一般暢通工況和擁擠工況按照各自占比選擇不同比例長度,組成綜合線路工況。3 類工況分別占比為43.58%、26.02%和30.40%,因此根據(jù)實(shí)際線路運(yùn)行時(shí)間約為1 h,構(gòu)建3 600 s 左右長度的綜合工況進(jìn)行所提出的擋位決策優(yōu)化方法的驗(yàn)證。組合成的綜合工況如圖7 所示。

圖7 線路綜合工況Fig.7 Integrated line condition
選擇線路累計(jì)燃油消耗量、高擋位利用率和累計(jì)換擋次數(shù)這3 個(gè)指標(biāo),將采取原換擋規(guī)律和基于動(dòng)態(tài)規(guī)劃提取出的換擋規(guī)律進(jìn)行對比,結(jié)果如表2 所示。
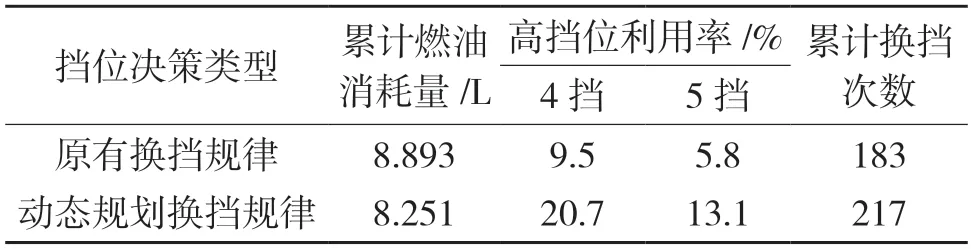
表2 2 類擋位決策方法結(jié)果對比Tab.2 Comparison of results of two kinds of gearshift decision methods
以傳統(tǒng)原換擋規(guī)律的燃油油耗量為基準(zhǔn),基于動(dòng)態(tài)規(guī)劃提取出的換擋規(guī)律比之降低了7.22%,高擋位利用率提高了18.5%,累計(jì)換擋次數(shù)稍微高于傳統(tǒng)換擋規(guī)律。基于動(dòng)態(tài)規(guī)劃提取出的換擋規(guī)律是以燃油消耗量最少為優(yōu)化目標(biāo),在3 種類型工況優(yōu)化中采取了不同的β值,通過升擋切換讓發(fā)動(dòng)機(jī)盡可能工作在高效區(qū)。因此,采用基于動(dòng)態(tài)規(guī)劃的擋位決策方法能夠有效提高燃油經(jīng)濟(jì)性。
4 結(jié)束語
本文以配備5 擋自動(dòng)變速器的某路城市客車為研究對象,為提高燃油經(jīng)濟(jì)性以及解決城市客車傳統(tǒng)換擋規(guī)律對于不同工況適應(yīng)度較差的問題,在分析國內(nèi)外擋位決策優(yōu)化方法的基礎(chǔ)上,考慮到城市客車具有固定線路、固定站點(diǎn)的特點(diǎn),應(yīng)用主成分分析、K-means 聚類分析、動(dòng)態(tài)規(guī)劃算法進(jìn)行適應(yīng)不同工況的最優(yōu)換擋規(guī)律提取,提出了不同交通環(huán)境下的擋位決策優(yōu)化方法。仿真結(jié)果表明,所提出的擋位決策優(yōu)化方法提高了高擋位利用率、降低了燃油消耗量,有效做到動(dòng)力性和燃油經(jīng)濟(jì)性的平衡。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
公民與法治(2020年11期)2020-07-25 02:02:06
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41