分層式主動均衡方法研究
2023-02-11 02:30:48尹志勇任曉琨
兵器裝備工程學報 2023年1期
王 俊,尹志勇,王 勇,郭 鑫,任曉琨
(陸軍工程大學石家莊校區 電氣與電力工程教研室,石家莊 050051)
1 引言
隨著可再生能源開發利用,微電網技術逐步應用到軍營、邊防哨所和野外供電中,有效擴展了軍用供電保障方式[1]。微電網技術中,儲能系統發揮著舉足輕重的作用,其中磷酸鐵鋰電池具有工作電壓高、體積小、使用壽命長、經濟環保等優點,在儲能電站中被廣泛使用[2]。在儲能系統中要將大量的單體電池串并聯起來,才能實現高電壓高容量的使用需求[3]。由于制造工藝復雜,電池生產出來時存在的初始狀態不一致性,造成電池串聯成組使用時的“先天性”差異,且無法從根源上消除[4]。而使用條件不同和不合理工況將會加劇初始不一致性,造成電池使用性能的下降,進而影響儲能系統安全可靠運行[5]。
通過提高生產工藝和成組前篩選,可以降低電池初始狀態的差異性,而使用中形成的不一致性則需要均衡技術來解決。目前均衡技術主要有2大類[6,7]:一是基于電阻的能耗型均衡,又稱為被動均衡[8],該方法結構簡單、易于控制、成本低,被廣泛應用于工程實踐中;二是基于儲能元件的非能耗型均衡,又稱主動均衡,根據能量轉移載體不同,可分為電感式均衡[9]、電容式均衡[10]、變壓器式均衡[11]和DC/DC變換器式均衡[12]等,具有均衡電流大、速度快、能耗低等優點,是當前均衡技術的研究重點之一。通過對上述主動均衡方式的拓撲結構、均衡效率、均衡速度、控制復雜度等方面分析對比,發現單一主動均衡方式在儲能系統中使用時存在均衡速度慢、效率低等問題。文獻[13]提出混合式2級均衡方案,通過底層Cuk變換器和頂層反激變壓器相結合的拓撲結構,有效提升了長距離能量均衡效率和速度,但存在變壓器制作復雜、結構體積大、擴展性不足等問題;文獻[14]提出2組分層式均衡方案,底層和頂層均利用Buck-Boost均衡電路來實現電池單體間及電池組間均衡,其中頂層結構是將整個電池串分為2個電池組,從而縮短均衡路徑來提高均衡效率和速度,但電池數量多時依然存在均衡路徑過長問題。
為了解決上述儲能系統中均衡方法不足,本文采用基于荷電狀態的分層式主動均衡方法,將串聯電池組分成若干個電池單元,利用Buck-Boost均衡電路實現單元內電池單體的雙向能量均衡,使用單電感均衡電路完成電池單元之間的能量均衡,這樣既發揮了各均衡方式的優勢,又克服了不足,特別是縮短了均衡路徑長度,取得較好的均衡效果,且在拓撲結構和控制復雜度上適中,可實現模塊化設計,集成度較高,利于擴展使用。
2 分層式均衡拓撲結構及工作原理
分層式主動均衡結構主要由電池狀態檢測電路、均衡主控制器、驅動電路、頂層均衡器、底層均衡器等構成,其整體結構如圖1所示。對串聯單體電池分組設置,將m×n節電池分成m個電池單元,每個電池單元有n節單體電池,當電池不夠平均分配時,最后一個電池單元內電池數量可按小于n設置。依靠電池管理系統數據采集模塊及相關芯片,完成單體電池及電池單元的狀態計算,通過均衡主控制器和驅動電路,實現電池單元內和電池單元間2層能量均衡,最終實現串聯電池組內所有單體電池的一致性均衡。

圖1 分層式主動均衡系統結構
2.1 底層均衡拓撲及工作原理

圖2 Buck-Boost型均衡電路
Buck-boost均衡電路主要由功率電感、MOSFET開關管、二極管等組成,當電池單元內的不一致性滿足均衡條件時,通過PWM驅動電路控制開關管導通和關閉,從而形成基于功率電感的充放電回路,實現單體電池能量轉移。考慮到均衡能量損耗問題,以相鄰電池能量轉移效率為0.95為例計算,電池串中從首節到末節能量均衡效率為0.95n,超過12節串聯時,能量轉移效率低于50%,故對單元內電池串聯數量要適當控制,數量在12節以內為宜。
電池單元內均衡具體工作過程如圖3所示。假設電池B1的能量高于電池B2,首先是電感充電過程,即電池B1放電階段。PWM控制電路發出驅動信號,開關管M1導通,電池B1、電感L1和M1組成放電回路,如圖3中實線圈所示。根據電感物理特性,電感電流從零增長,電感值一定時,Imax大小取決于開關管的導通時間,此過程中電池B1的電能轉換為磁能存儲在電感L1中,電池B1的能量減少。而后進入電感放電過程,即電池B2的充電階段。開關管M1關閉,B2、L1和二極管D2組成放電回路,如圖3中虛線圈所示。由于電感L1中的電流不會突變,放電電流將從Imax開始減小,電流方向為逆時針,此過程電感釋放存儲的磁能,電池B2充電。隨著放電電流減小,二極管D2正向導通電壓和放電回路電阻壓降之和小于電池電壓時,電感停止放電。

圖3 Buck-Boost型均衡充放電過程
當單元內電池不相鄰時出現不一致,則按照從能量最高單體向最低單體的路徑,中間電池作為能量轉移中間站,逐個充放電傳遞能量,最終完成電池單元內的一致性均衡。
2.2 頂層均衡拓撲及工作原理
電池單元間均衡拓撲由一個功率電感和若干開關管組成,其結構如圖4所示。首先將每個電池單元作為一個“大電池”,這樣整體串聯的電池組就被劃分為若干個“大電池”,等同于減少了串聯電池數量,然后采用單電感均衡方式對任意兩不均衡電池單元間進行能量均衡。通過與底層均衡單元配合,改變了單電感均衡方式不適合多電池串聯均衡的不足,提高均衡效率與速度,降低了控制復雜度。

圖4 上層單電感均衡電路
頂層均衡過程包括電感充電和放電2個階段。假設電池單元1能量最高,電池單元3能量最低,達到均衡開啟條件后,能量均衡過程如圖5所示。

圖5 單電感均衡充放電過程
在PWM驅動電路控制下,充電階段開關管S11、S22導通,電池單元1通過開關管對電感進行充電,電流沿圖5中紅色實線箭頭方向,電能轉換為電感磁能儲存起來;放電階段,控制信號驅動開關管S14、S23導通,電感通過開關管回路對電池單元3進行充電,電流方向如圖5中紫色虛線箭頭所示,電磁能轉化成電能,這樣電感就完成一次充放電,在PWM控制電路作用下,重復上述過程,直至達到均衡關閉條件,而后進入下一對電池單元均衡過程。
2.3 電路參數計算
分層式主動均衡設計主要是基于功率電感實現單體電池到單體電池、電池單元到電池單元之間能量轉移,在此過程中電感工作狀態至關重要。考慮到均衡過程中磁飽和及均衡電流大小控制問題,本文采用電感斷續工作模式(DCM)進行均衡。
對于少數民族連片特困鄉村來說,在歷史上即存在著政治、經濟、文化落后的情況,并且多數人口受教育水平不高,導致素質較為低下、思想觀念相對陳舊,以此為基礎,鄉村中存在著臟、亂、差的環境情況,并且難以得到有效治理。與此同時,多數人口不能夠對生態文明建設進行正確的理解和認識,所以對于生態文明建設的參與度較低,對生態環境的保護也相對較為冷漠,不能夠對政府的各方面政策進行積極的配合[1]。
假設電池B1的電壓U1大于電池B2的電壓U2,以圖3中一個充放電周期為例,電感工作過程為:
(1)
(2)
式(1)~(2)中:Ron、Roff為充放電回路的總電阻;t1為充電時間,t2為放電時間;UD為開關管并聯二極管導通壓降。由于Ron、Roff數值是幾十毫歐,為了便于計算,忽略不計,則電感電流成線性變化。t1時刻電感充電到電流最大值iLmax,t2時刻電感放電到電流最小值iLmin,有:
(3)

(4)
式(3)~(4)中:D為PWM波的占空比;T為PWM波的周期;f為PWM波的頻率。當電感工作在DCM狀態時,t2=T時刻電感電流小于零,即iLmin≤0,表示為:
(5)
簡化為:
(6)
磷酸鐵鋰電池工作區電壓3.2 V左右,并聯二極管導通壓降0.6~0.8 V,電感工作在DCM模式時,計算得占空比D<53%,綜合考慮選擇PWM波的占空比為50%。
考慮到磷酸鐵鋰電池充放電安全問題,底層均衡和上層均衡電感峰值電流分別為:
(7)
(8)
由此推導出電感和PWM頻率關系式為:

(9)
(10)
由式(9)、式(10)看出,電感參數和PWM頻率成反比,在實際工程設計中,電感數值與均衡電路的體積成正比,數值選取大時不利于均衡電路小型化,因此一般選用小電感和高頻率PWM波。
3 相對極差均衡控制策略
科學合理的均衡策略可以快速、準確、便捷地實現均衡效果,通常把工作電壓和荷電狀態(SOC)作為評價電池組不一致性的均衡變量[15],常用的均衡策略有極值法、平均值法及相鄰比值法、模糊控制法等[16]。綜合考慮磷酸鐵鋰電池的工作特性,本文選擇電池SOC作為均衡判斷依據,基于“削峰填谷”的均衡原則,使用相對極差作為均衡開啟條件,采用分層同步模式,實現單體電池和電池單元間的一致性均衡。
相對極差β是指單體電池SOC最大值或最小值與電池單元SOC平均值之差,其具體計算公式為:

(11)

(12)
(13)
式(11)~(13)中:SOCi為電池單元內第i節單體電池的SOC值;SOCk為串聯電池組中第k個電池單元中n節單體電池SOC的平均值;SOCi max,SOCj min是電池單元內最大和最小SOC值;β+為正向相對極差;β-為負向相對極差。
設定相對極差閾值為0.01,當相對極差β+或β-大于0.01時,則開啟均衡;當相對極差β+或β-小于等于0.01時,則停止均衡。使用相對極差作為均衡開啟條件可以有效防止電池過度均衡或反復均衡的問題,提高均衡效率,減少能量損耗。
對于底層電池單元來講,通過電池狀態監測模塊獲得電池工作參數,確定電池SOC最大、最小單體,計算SOCk、β+、β-等數值,達到均衡開啟條件時,均衡控制電路驅動相應MOSFET導通,通過Buck-Boost均衡模塊對電池單元內SOC最大與最小單體進行均衡,如此循環,直至單元內所有電池單體滿足一致性要求,若出現相同SOC的最大或最小單體,選擇相鄰最近單體電池進行均衡。對于上層均衡結構來講,SOCk就相當于電池單元這個“大電池”的SOC,在底層均衡計算基礎上,只需計算整體電池組SOC平均值和確定SOC最大、最小電池單元,按照相對極差均衡控制策略閾值啟動上層均衡,通過功率電感進行最大、最小電池單元間的直接均衡。具體均衡流程如圖6所示。

圖6 分層式同步均衡控制策略
4 仿真實現與驗證
在Matlab/Simulink中搭建多節電池的均衡電路仿真模型,通過實時單體電池SOC的變化,驗證本文提出的基于SOC分層式主動均衡方案的可行性和均衡效果。為了便于驗證,搭建了6節串聯電池組均衡模型,每2節單體電池為一個電池單元,單體電池使用模型庫中自帶電池模塊,容量設置為1.8 Ah,額定電壓為3.2 V,初始SOC分別為75%、72%、74%、71%、73%、71%。均衡最大電流設為2 A,PWM輸出脈沖頻率為1 kHz,導通占空比為0.5,根據電路參數計算得底層均衡電路電感值為8 mH,頂層均衡電感值為16 mH。
4.1 均衡方法可行性驗證
分層式主動均衡方案可以實現電池靜態和動態工作工況時的均衡,且底層均衡和頂層均衡可以同步進行,并不影響儲能系統串聯電池組主路充放電工作狀態。以靜態均衡和充電均衡為例,對均衡方案可行性進行驗證分析,其仿真結果如圖7、圖8所示。

圖7 靜態同步均衡SOC變化曲線

圖8 充電同步均衡SOC變化曲線
從圖7可以看出,在靜態工況下,出現不一致超過設定閾值后,2級均衡會同時啟動,進行相應的能量均衡。從均衡過程看出,能量較高的電池B1對單元內電池B2進行充電,同時總體能量較高的電池單元1也進行放電均衡,最終電池B1放電速度最快,電池B2既充電又放電,達到動態平衡緩慢變化,經過213 s后完成一致性均衡,電池組的SOC為72.54%。從圖8充電動態工況來看,在均衡作用下低能量電池單體整體充電速度較快,高能量電池單體充電速度較慢,經過161 s均衡,電池組實現一致性。通過對2種工況的仿真,表明基于SOC的分層式同步主動均衡方案的可行性。
4.2 均衡方法與策略對比
分層式主動均衡方法在控制策略上有2種:一種是分步均衡,即底層均衡完成后再進行頂層均衡;另一種是2級均衡同步進行。以靜態均衡為例,對比2種均衡策略,分步均衡仿真結果如圖9所示。與同步均衡圖7對比來看,2種均衡策略都能實現電池組一致性均衡,但同步均衡用時213 s完成,而分步均衡需要283 s,在均衡時間快70s;在能量轉移效率上,同步均衡策略是82.6%,分步均衡策略是81.4%,二者相差1.2%。經過2種均衡策略對比,同步均衡時間短、均衡速度快、均衡效率高,表明同步均衡策略具有優越性。

圖9 靜態分步均衡SOC變化曲線
根據文獻[13]的均衡方案,本文建立了其仿真模型,單元內串聯3節電池,共2個電池單元,在相同的參數設置和同步均衡控制策略下進行仿真對比。同樣以靜態均衡為例,后者仿真結果如圖10所示。與圖7對比來看,該均衡方案在264 s完成電池組均衡,均衡時間比本文分層式同步均衡方案多51 s;從能量轉移效率上來計算,該方案均衡效率是81.8%,2種方案相差0.8%。總體衡量,這2種方案在結構復雜度、控制難度等方面相當,但在能量轉移效率上得到提升,特別是均衡速度上,用時更短,因此本文提出的均衡方法更具優勢。
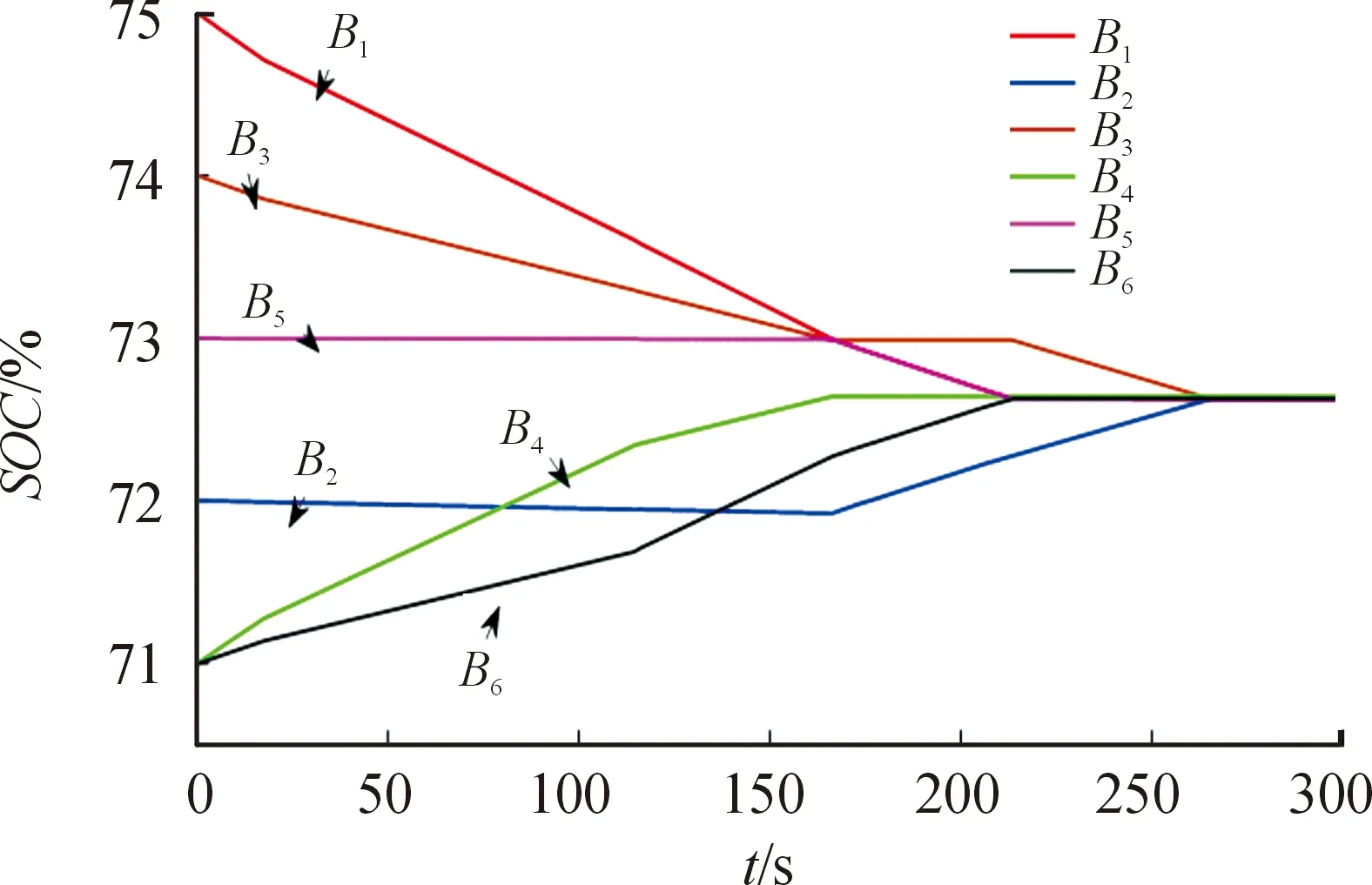
圖10 兩組分層式均衡SOC變化曲線
5 結論
本文提出一種基于SOC的分層式主動均衡方案,采用相對極差同步均衡控制策略,通過對其拓撲結構和工作原理分析,利用建模仿真對比分析驗證,得出以下結論:
1)分層式主動均衡電路通過底層和頂層同步均衡,快速實現串聯電池組一致性均衡,且均衡電路相對簡單,控制難度適中,適用于大規模儲能系統中,能夠有效防止單體電池過充、過放情況的發生,提高了電池組的可用容量。
2)基于SOC的相對極差同步均衡控制策略能夠有效實現電池組一致性均衡,相比分步式控制策略,時間上縮短了24.7%,能量轉移效率上提高了1.2%。
3)通過靜態工況仿真驗證,與2組式分層均衡方案相比,該均衡方案能夠縮短電池單體間均衡路徑長度,均衡時間降低了19.4%,能量轉移效率提升了0.8%。因此基于SOC的分層式主動均衡方法具有更好的均衡效果,可以快速完成電池組不同工況下的不一致性均衡。
