考慮失穩風險的智能車輛換道避障危險評估方法研究
2023-02-08 12:54:52姚鳴杰張緩緩
智能計算機與應用 2023年1期
姚鳴杰,張緩緩,楊 博
(上海工程技術大學 機械與汽車工程學院,上海 201620)
0 引言
危險評估是智能車輛自動駕駛系統的關鍵環節。在避障問題中,危險評估直接影響了智能車輛的行駛安全性。危險評估的方法主要分為基于狀態量的危險評估、基于駕駛意圖預測的危險評估和基于交互式的危險評估等。Zhang Y[1]將兩車間距與兩車相對縱向車速的比值作為安全距離指標,達到縱向避撞的效果;裴曉飛[2]以碰撞時間倒數(TTC)作為評價指標,設計的安全距離模型大大增強了主動避撞的效果;K?fer[3]通過在駕駛員模型中設定較高的避障意圖的方法,進行危險評估;Yoo[4]基于博弈的思想建立了交通車碰撞模型,并根據所收集的駕駛員安全確信度數據,建立了一種擬人化的危險評估方法;邊明遠[5]采用正弦函數加速度曲線作為避障軌跡進行危險評估;Aoude[6]通過蒙特卡洛采樣的方法預測碰撞概率,并對概率進行分級,設計了危險評估策略。
本文采用七次多項式作為換道避障的軌跡,確保車輛換道軌跡的平滑;基于七次多項式軌跡對車輛橫擺角速度進行約束,在考慮智能車輛碰撞風險的基礎上設計了一種同時考慮失穩風險的危險評估模型;經仿真分析,驗證了所設計的危險評估方法可以有效提高智能車輛換道避障的安全性。
1 換道軌跡規劃
設車輛換道的初始坐標為原點坐標 (x0,y0),終點坐標為 (xt,yt),將換道軌跡用橫向與縱向位移的七次多項式曲線表示,式(1)[7]:

表達為矩陣形式,式(2):

其中,

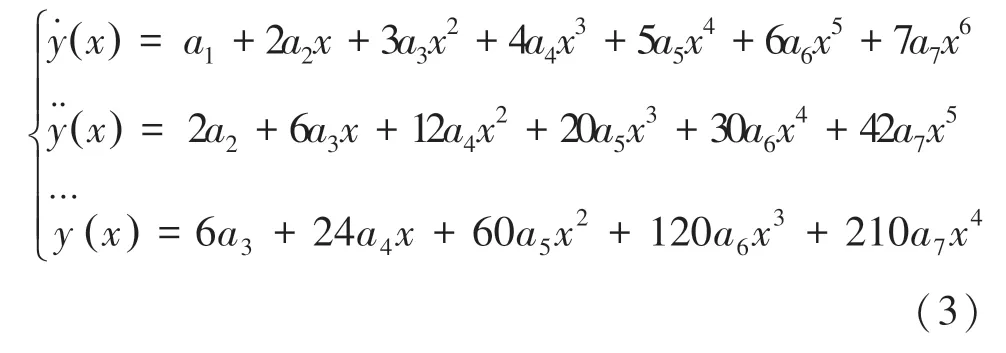
對式(1)求導,可以得到車輛速度、加速度與加速度變化率表達式,式(3):
根據車輛初始狀態與終點狀態的運動學約束,可以得到約束條件關系式,式(4):

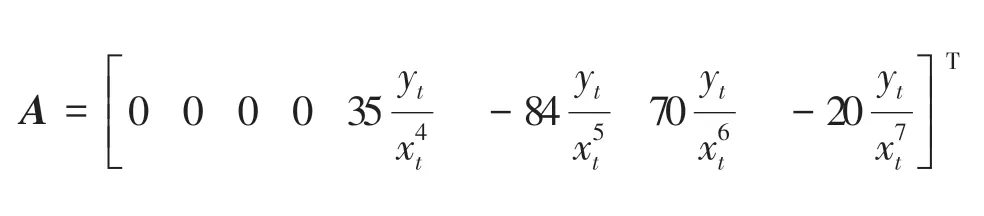
由x0=0,可得系數向量
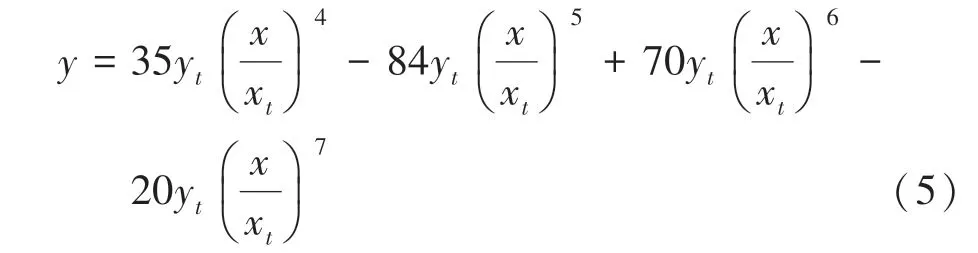
最終,車輛換道軌跡曲線可由七次多項式方程表達,式(5):
由七次多項式方程所得到的車輛換道避障軌跡示意圖如圖1 所示。
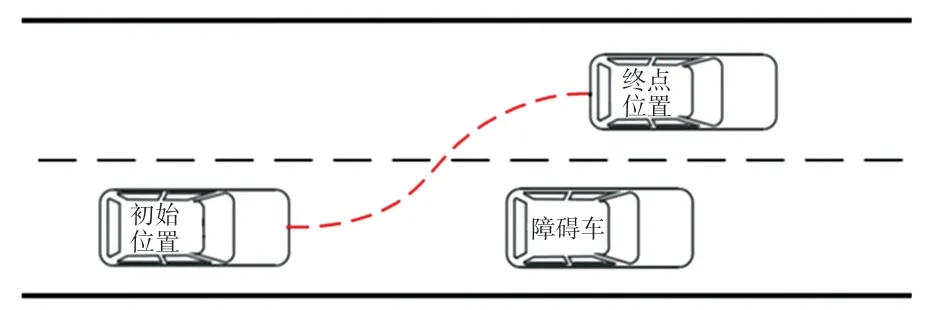
圖1 換道避障軌跡示意圖Fig.1 Schematic diagram of lane -change obstacle avoidance trajectory
2 危險評估模型建立
在智能車輛換道避障前進行有效的危險評估,可以確保智能車輛預測和評估風險,以采取恰當的換道時機,提高換道避障的安全性,本文結合車輛換道軌跡和車輛橫擺角速度約束,建立了考慮失穩風險的危險評估模型。首先,根據車輛動力學原理,可知車輛側向速度與縱向速度的關系式(6):

其中,vx為縱向車速;vy為側向車速;β為質心側偏角。
車輛質心的側向加速度為ay,式(7):

其中,γ為橫擺角速度。
將式(6)帶入式(7),可以得到側向加速度,式(8):

由式(8),可以得到受質心側偏角影響的側向加速度,式(9):
車輛側向加速度與路面附著條件的關系式可以表達為式(10):

其中,μ為路面附著系數,g為重力加速度。
根據式(10),可定義關系式(11):

其中,kβ為動力學因子,且0<kβ <1。
將式(11)帶入式(10),可以推導出式(12):
理想的車輛橫擺角速度應滿足表達式(13):
將式(5)與式(13)聯立,可將車輛的理想橫擺角速度表示為式(14):
由式(15)可知,當P =0.3 時,車輛的理想橫擺角速度γd能夠取得最大值,即式(16):
根據車輛動力學約束條件,可將式(12)表達為不等式關系(17):

聯合式(16)和式(17),即可推導得出危險評估函數式(18):
為了保證危險評估模型在換道避障時的實時性,還需要考慮障礙物與自車之間的實時距離。根據距離的比例關系,定義關系式(19):

其中,m和n為比例系數,且m >0,n >0。
聯合式(5)和式(20),可以推導出公式(20):

將式(19)和式(20)帶入式(18),可推導出新的危險評估函數,式(21):
其中,yd和xd分別為自車與障礙物間的橫向及縱向間距,考慮車輛和車道寬度,設定yd =2.2 m。
根據式(19),將動力學因子、路面附著系數和縱向車速看作常數,將比例系數n和縱向車間距xd作為變量,并且令fc(·)=0,可知當n≈2.2 時,縱向車間距最小,而根據式(20),容易求得當n =2 時,m=2。因此,為簡化危險評估函數,令n =2,可將式(21)整理為:
不同路面附著系數下縱向車速和縱向車間距對危險評估模型的影響如圖2 所示,可以觀察到危險評估因子kc隨著縱向間距Xd的減小和縱向車速Vx的增加而增大;隨著路面附著系數μ的增加,危險評估因子kc減小,危險評估因子kc的范圍在(0,1)區間范圍內,說明危險評估模型可以有效量化風險。
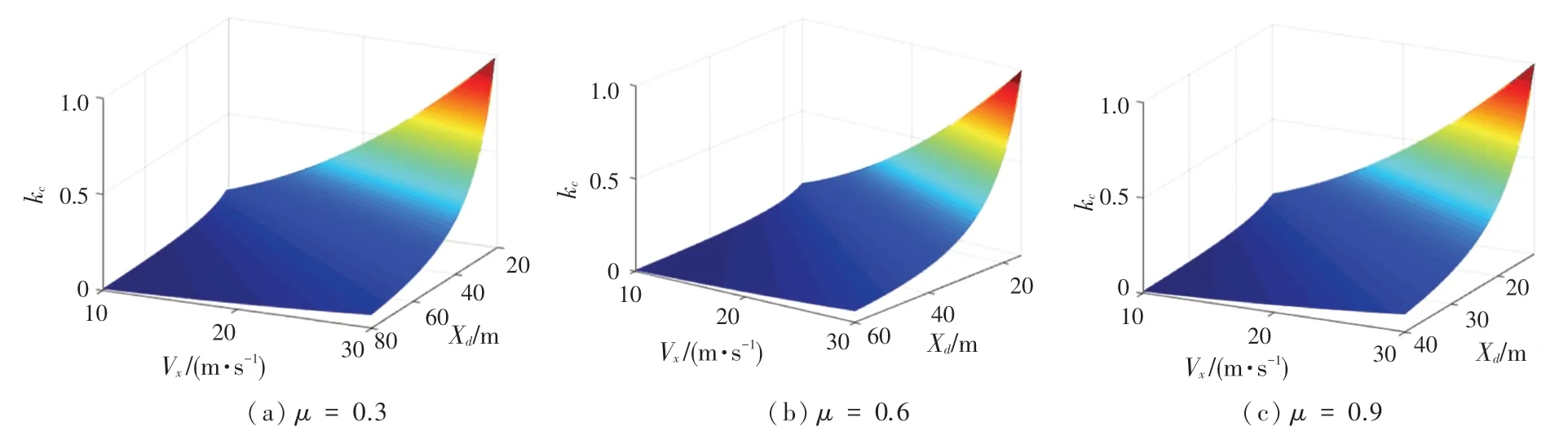
圖2 不同路面附著系數下縱向車速和縱向車間距對危險評估模型的影響Fig.2 The impact of longitudinal speed and longitudinal car distance on the risk assessment model under different road adhesion coefficients
3 仿真分析
本文采用Carsim-Simulink 聯合仿真對危險評估方法進行驗證分析,在緊急換道避障工況下,對比分析智能車輛的換道避障控制效果。仿真工況設定為:路面附著系數μ =0.3,自車初始車速Vx =60 km/h,距障礙物車距Xd =32 m。
仿真結果如圖3~圖9 所示。
由圖3 可知,危險評估模型可以實時預測與評估風險,在0~3.65 s 內迅速上升,并在3.65 s 降為0,說明在3.65 s 之后,車輛通過換道操縱避免了碰撞風險。
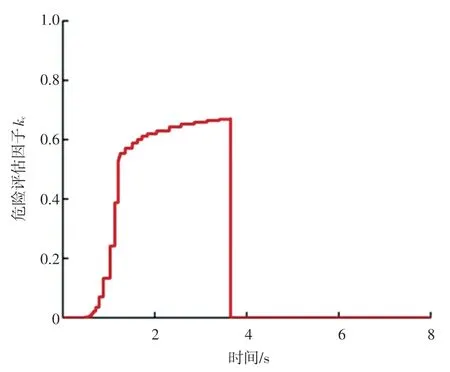
圖3 危險評估因子變化曲線圖Fig.3 Change curve of Risk assessment factor
如圖4 和圖5 所示,規劃的參考換道軌跡連續且平滑,符合七次多項式的曲線特征,實際換道軌跡的跟蹤效果都較好;未經危險評估的軌跡跟蹤偏差峰值大約為0.17 m,而經危險評估后的軌跡跟蹤偏差波動明顯減小,且峰值大約為0.84 m,說明本文所設計的危險評估方法可以有效提高換道軌跡跟蹤的精度。
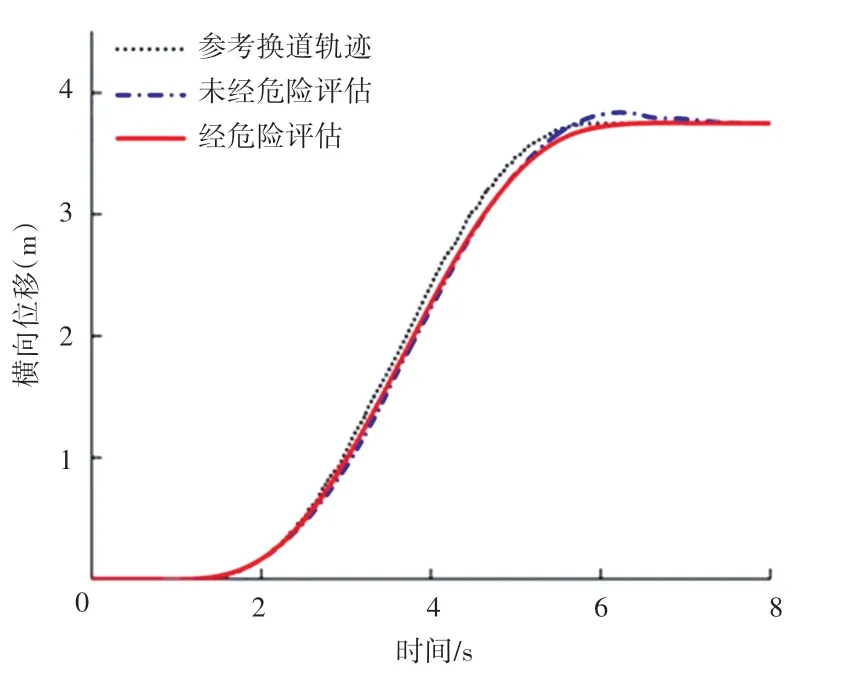
圖4 換道軌跡曲線Fig.4 Lane change trajectory curve
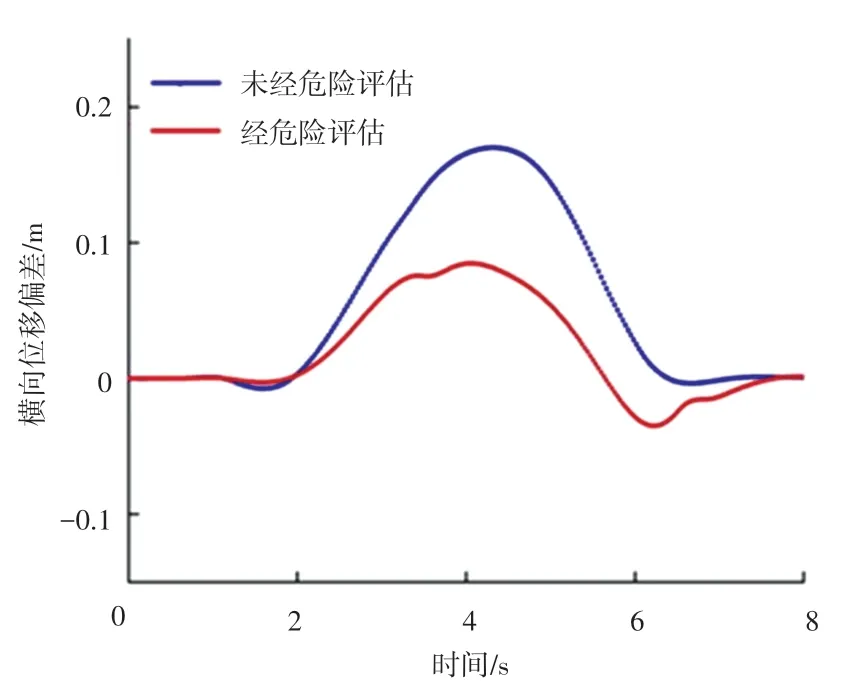
圖5 橫向位移偏差曲線Fig.5 Lateral displacement deviation curve
由圖6~圖9 可知,車輛橫擺角速度、側向加速度、質心側偏角及前輪轉角的變化曲線都較為平緩,未出現過大振幅和明顯抖動,且經危險評估后,各項參數的波動都有一定程度的減小,有效提高了智能車輛在緊急工況下換道避障的穩定性。
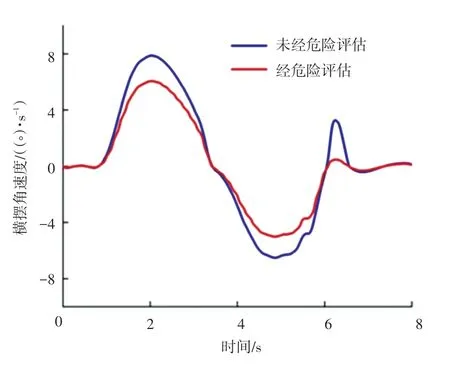
圖6 橫擺角速度曲線Fig.6 Yaw rate curve
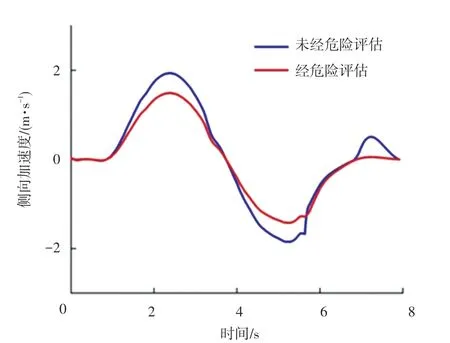
圖7 側向加速度曲線Fig.7 Lateral acceleration curve
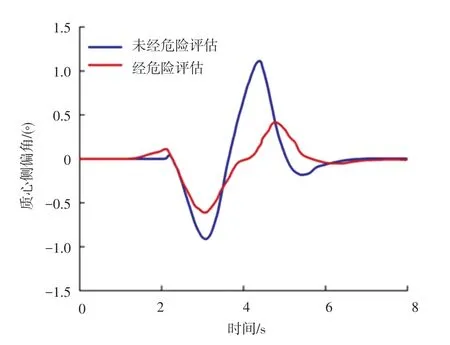
圖8 質心側偏角曲線Fig.8 Centroid slip angle curve

圖9 前輪轉角曲線Fig.9 Front wheel angle curve
綜上,本文所設計的危險評估方法可以有效提高智能車輛的換道避障精度,并且能夠對車輛橫擺角進行有效的約束,提高換道避障的穩定性和安全性。
4 結束語
危險評估模型對智能車輛的換道避障有重大影響,本文通過七次多項式進行車輛換道軌跡規劃,并結合七次多項式換道軌跡和車輛橫擺角速度,設計了一種綜合考慮碰撞和失穩風險的危險評估模型進行車輛換道避障的危險評估。通過Carsim -Simulink 聯合仿真,模擬緊急換道工況,進行車輛緊急換道避障仿真。仿真結果表明,所提出的危險評估方法可以精確預測和評估換道風險,并能有效提高智能車輛換道避障的穩定性和安全性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
光學精密工程(2016年6期)2016-11-07 09:07:19