基于MPC的智能車輛變軌跡跟蹤控制研究
2023-01-12 03:58:16賀曉麗
裝備制造技術 2022年10期
賀曉麗
(天津職業技術師范大學,天津 300222)
0 引言
軌跡跟蹤作為研究智能車輛的一部分,其作用是幫助智能車輛按照規劃層規劃出的軌跡路線穩定、精確行駛,將智能車輛的“想法”變成“現實”的執行環節。目前,已有眾多學者對智能車輛的軌跡跟蹤模塊進行了深入研究[1-4]。張灝琦[5]針對智能車輛在低附著系數路面等環境下軌跡跟蹤的精確性差以及穩定性不高的問題展開了研究,對傳統LQR(線性二次型調節)的方法進行了優化,提出的前饋LQR算法提高了軌跡跟蹤的精度。吳飛龍[6]針對高速工況下、低附著系數的復雜路面上轉向和行駛穩定性等難以控制的問題,在傳統MPC控制器的基礎上設計了前輪主動轉向控制器,對控制器參數進行了優化,并進行了實驗驗證。于向軍[7]針對環衛車輛周期重復性工作特點,考慮模型時變以及未知擾動問題,提出了一種基于無模型自適應迭代學習的環衛車輛軌跡跟蹤控制方法,提高了軌跡跟蹤的精度。
綜上可知,眾多學者在軌跡跟蹤這方面的研究一般是針對追蹤單軌跡而言,單純追蹤圓形軌跡或者單純追蹤五次多項式軌跡,又或是在追蹤單條軌跡的條件下研究不同工況下的追蹤情況,但是針對變軌跡跟蹤問題的研究尚未涉獵。因此對智能車輛進行變軌跡跟蹤研究。基于傳統的MPC(模型預測控制)控制器設計一種軌跡跟蹤控制器,使得所設計的控制器應用于智能車輛時能夠先進行5次多項式的單行換道然后繼續追蹤一定半徑的圓形軌跡行駛。
1 車輛運動學模型
選擇二自由度車輛運動學模型,以后輪軸心為參考點建立車輛運動學模型,如圖1所示。
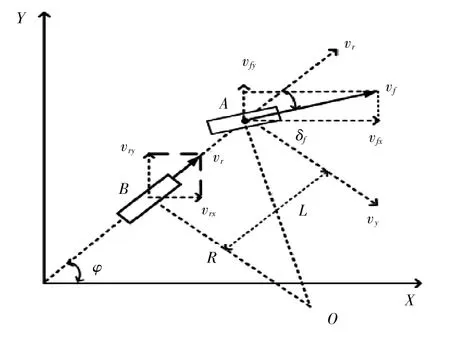
圖1 二自由度車輛運動學模型
圖1為依據阿克曼轉向定理得到二自由度車輛運動學的簡化模型。A點為前軸中心點,B點為后軸中心點,vr為后輪速度,vf為前輪速度,δf為前輪轉角,L為軸距,O為瞬時轉動中心,R為轉動半徑,φ為橫擺角。
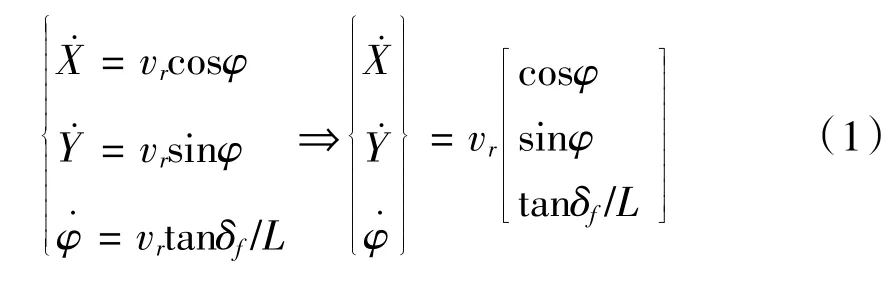
根據幾何圖形、理論力學以及高中的知識分析圖1,可得到該二自由度的車輛運動學模型的狀態空間表達式(1):
2 MPC軌跡跟蹤控制器設計
分析MPC的原理,設計一種智能車輛軌跡跟蹤控制器,使得所設計的控制器應用于智能車輛時能夠先單行換道然后繼續追蹤圓形軌跡。設計步驟如下:
2.1 線性誤差模型的建立
由車輛運動學模型的狀態空間表達式(1)可設立該系統的狀態量為X=[x,y,φ]T,控制量為u=[vr,δf]T,運動學形式寫為:

設立參考系統的運動學形式為:

其中參考狀態量Xr=[xr,yr,φr]T,參考控制量ur=[vr,δr]T。
(1)線性化處理
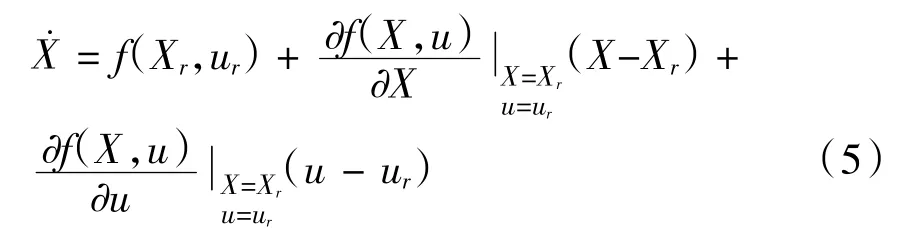
將式(2)在點(xr,ur)處采用一階泰勒展開,只保留一階項,忽略高階項。泰勒公式為

得到
將式(5)與式(3)相減得到:
將式(6)寫為

式(7)則為車輛運動學模型的線性誤差模型。
(2)離散化處理
對式(7)進行前向歐拉離散化:

得到

令TA+E=a,TB=b,則得到離散狀態空間方程

(3)構建新的狀態空間方程
為了將狀態量偏差和控制量偏差都整合進去,構建新的狀態空間方程

將式(11)迭代一次得到式(12):

2.2 預測方程
預測時域Np≥控制時域Nc。將式(12)進行迭代得到:
得到預測方程

由式(14)可知下一時刻的輸出量等于該時刻的狀態量與該時刻控制量的變化量之和,求解出控制量的變化量即可預測出下一時刻的輸出量。
2.3 優化
為求解控制量的變化量,將求解問題轉化為二次規劃問題。構建代價函數為
式中ρ為權重系數,ω為松弛因子。
2.4 約束

利用硬約束和軟約束對控制增量進行求解,將約束條件轉化為控制增量的形式,得到轉換矩陣的形式為:

求解出控制量變化量的矩陣序列,將求解的結果代入誤差方程進行滾動優化。如此循環往復。
3 Carsim-Simulink聯合仿真
利用Carsim和Matlab中的Simulink模塊建立Carsim-Simulink聯合仿真實驗平臺。
3.1 在Carsim中選取智能車輛
選取智能車輛如圖2所示。
圖2 所選智能車輛圖示
選取智能車輛的相關參數設置見表1。
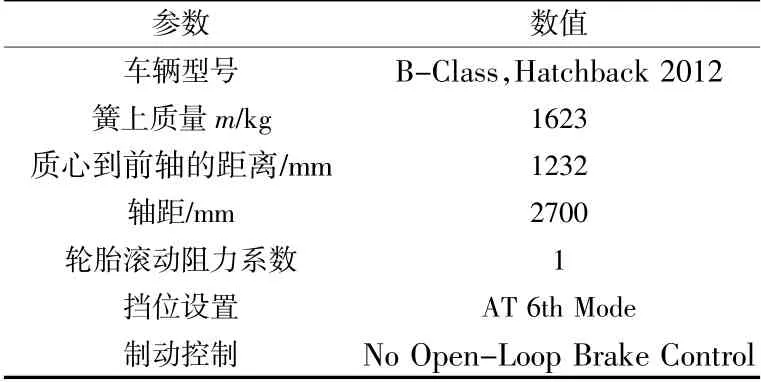
表1 智能車輛的參數設置
3.2 設置實驗條件
智能車輛的起點設置為原點,參考軌跡設置為五次多項式的單行道換道然后進行圓形軌跡的變軌跡路線。采樣時間設置為0.01 s,仿真時間為30 s,松弛因子的值為10,參考變軌跡的前輪轉角為0。
3.3 仿真驗證環節
建立Carsim與Simulink聯合仿真的平臺。選擇Carsim軟件提供的一部車型,輸入輸出參數進行設置,完成Carsim與Simulink接口設置。將智能車輛模型發送至Simulink中;在Simulink中搭建模型,將設計的軌跡跟蹤控制器算法嵌入S-Funcation模塊實現程序。驗證結果如圖3所示。
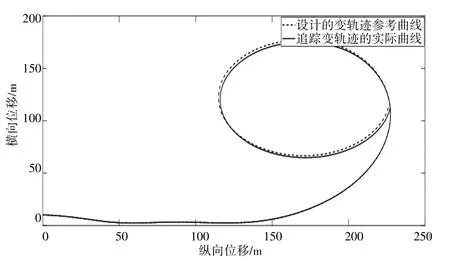
圖3 追蹤變軌跡的實際位移與預設變軌跡位移對比圖
由圖3可看出,虛線代表所設計的參考變軌跡位移曲線,實線代表將所設計的MPC變軌跡跟蹤控制器應用于該智能車輛時的實際追蹤位移曲線。從圖中觀察可知,所設計的變軌跡MPC軌跡跟蹤控制器應用于該智能車輛時能夠很好地完成先單行換道又繼續追蹤圓形軌跡的追蹤任務及能夠比較精確的追蹤上所設計的變軌跡曲線,從而證明該控制器具有適應變軌跡追蹤的可行性。
如圖4所示為所設計的MPC變軌跡跟蹤控制器應用于智能車輛時追蹤所設計的變軌跡曲線時的橫向位移對比曲線圖,其中虛線部分為追蹤變軌跡的參考橫向位移曲線,實線部分為追蹤變軌跡時的實際橫向位移曲線。從圖中觀察得知,在0~15 s的單行換道時域內,實際軌跡與參考軌跡基本吻合;然后結束換道,在15~30 s時域內繼續追蹤圓形軌跡時同樣具有良好的追蹤性,實際橫向位移與設計的變軌跡參考位移之間誤差很小,誤差基本穩定為0~0.5 m。
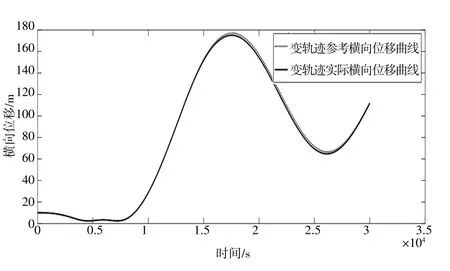
圖4 追蹤變軌跡的橫擺角速度曲線圖
綜上可知,基于傳統MPC軌跡跟蹤控制器設計的一種MPC變軌跡跟蹤控制器應用于智能車輛時能夠成功完成先執行單行換道后繼續追蹤圓形軌跡的變軌跡任務。因此本設計的軌跡跟蹤控制器具有適應變軌跡追蹤的新型用途。
4 結論
(1)基于MPC原理,分析了傳統MPC軌跡跟蹤控制器的設計過程。通過建立二自由度的車輛運動學模型,經過線性、離散化處理得到線性誤差方程;在此基礎上進行迭代得到預測方程,將求解控制量的問題轉化為二次規劃問題,結合硬約束和軟約束環節對該問題進行求解和滾動優化。
(2)在傳統MPC軌跡跟蹤控制器的基礎上增加設計五次多項式和圓形軌跡相結合的變參考軌跡,并將該MPC變軌跡跟蹤控制器嵌入Simulink中的S_Function模塊。搭建了Carsim-Simulink聯合仿真實驗平臺。驗證結果顯示:MPC變軌跡跟蹤控制器應用于智能車輛時,能夠完成先執行五次多項的單行換道,后繼續進行圓形軌跡的追蹤任務,證明該MPC變軌跡跟蹤控制器具有適應變軌跡追蹤的新型用途。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16