一種基于模糊控制的分數階自適應導納控制方法
2023-01-12 03:57:42谷中歷
裝備制造技術 2022年10期
關鍵詞:康復
谷中歷
(重慶交通大學 機電與車輛工程學院,重慶 400074)
0 引言
近年來,腦卒中患者連年上升[1],因其導致的下肢運動障礙嚴重影響患者的日常生活。臨床上可以通過康復運動和實踐訓練改善下肢運動,從而重塑運動神經的通路。在康復訓練中通常是在身體運動訓練期間使用機器人與患者的肢體互動,按照預定的運動軌跡進行訓練。目前已經開發了不同的控制算法來實現機器人與患者之間的人機交互。Jamwal等[2]利用阻抗控制方法實現踝關節康復機器人的柔順控制;梁旭[3]等人利用模糊規則設計基于阻抗參數自適應的柔順交互控制方法。可以發現,機器人的柔順性主要通過阻抗來順應交互力,其中主要有兩種方法來實現,分別是基于位置的阻抗控制也叫導納控制器和基于力的阻抗控制[4],然而傳統的整數階阻抗控制對人機之間的交互力描述不夠準確,而且存在較大跟蹤誤差,故亟需找到一種提高系統穩定性與人機之間柔順性的控制方法。在系統建模和控制器設計中,分數階已被證明是提高系統性能的重要技術[5]。因此,本研究引入分數階的思想,使慣性、阻尼和剛度的階數從整數變為分數,以獲得更顯著的柔順性,同時采用模糊規則自適應地調整導納控制器的各項參數。而機器人的位置控制器則采用PID控制實現下肢康復機器人的軌跡跟蹤。
1 動力學建模
考慮下肢外骨骼康復機器人的驅動方式為膝關節單自由度驅動,即大腿相對固定,小腿繞大腿做屈伸運動,將受試者與外骨骼機器人之間用綁帶連接,則機器人下肢與受試者下肢之間的動力學模型可由(1)式描述:
式中,下標e、h分別代表機器人、人的參數,D代表慣性力項,m代表小腿質量,l代表小腿長度,g代表重力加速度,θ代表膝關節角度,τint代表人機交互力矩。人機耦合運動過程中,人下肢與外骨骼機器人并不是嚴格重合,所以人機之間的交互力十分復雜,為了簡化模型,采用彈簧阻尼模型噪1(θb-θe)+噪2(θ˙b-θ˙e)描述人機之間的交互力矩。
2 分數階阻抗控制系統設計
2.1 基于位置的阻抗控制器
導納控制器又被視為基于位置的阻抗控制,通常將人機之間的動態特性比擬成具有導納特性的系統,則構建交互力與位移之間的關系[6]如下:

式中,Md,Bd,Kd代表期望慣性,阻尼與剛度,Fe代表交互力。
可以發現,當λ=2,γ=1時,該控制器轉變成傳統的二階導納控制器,當λ,γ取值為分數時即為分數階導納控制器,相比于二階導納控制器此控制器能調節更多參數,可以實現更多的阻抗行為。
為了確定合適的分數階參數,參考文獻[7]方法,把系數λ,γ對系統的影響降到最小來表明λ,γ的調節作用,若λ,γ參數的某個數值對系統的各項性能最好時,當前值就為臨界分數階參數。選擇輸入的軌跡設為階躍信號,仿真結果如下:
從圖1可以發現,分數階導納控制器在響應時間方面比整數階快,且整數階導納控制器的效果最不理想,系統達到穩態所需時間最長。在γ=0.2時,對比了不同λ值的輸出結果,當λ取值為1.6時,系統達到穩態所需時間、上升時間、超調量等方面都是最優的。故選擇λ=1.6為分數階參數。
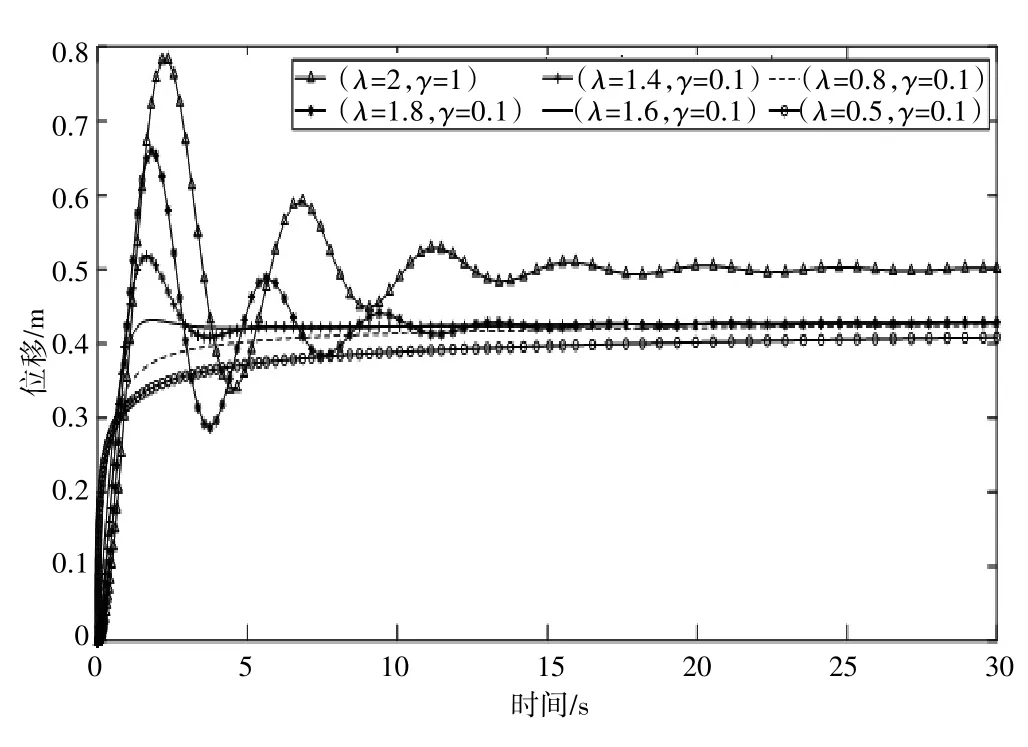
圖1 參數λ對系統的影響
從圖2可以看出,當參數λ為分數時的響應效果比整數時效果好,在確定λ=0.2時,改變γ的值,當γ的值越小,系統的響應速度越快,但是過小會使得系統表現并非最佳。從圖中可以看出選擇γ=0.5時效果最好。
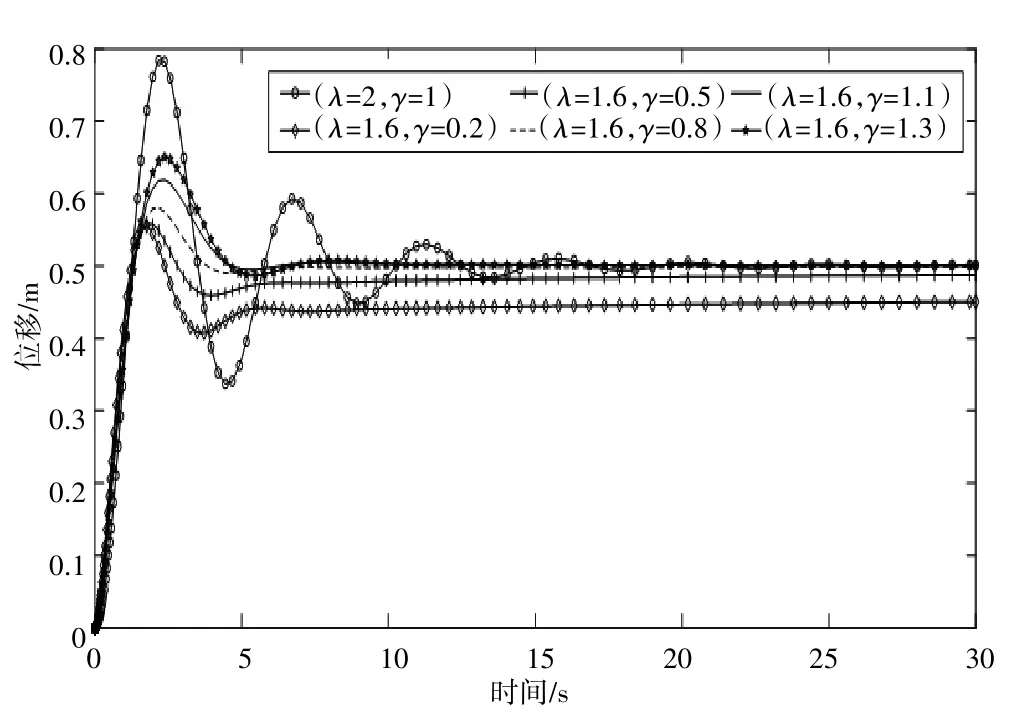
圖2 參數γ對系統的影響
綜上所述,我們可以確定分數階導納控制器的效果比整數階性能更優,當λ=1.6,γ=0.5時效果最好。
2.2 基于模糊規則的自適應導納控制
利用模糊調節器自適應調節分數階導納控制器中的參數,由于慣性項對系統的影響較小[8],故只調節參數Bd,Kd,如表1所示的模糊規則會根據運動軌跡角度變化量△e˙和人機之間的交互力△τint在線實時地對導納參數進行調節。

表1 變阻尼系數△Bd,△Kd的模糊規則
設計模糊子集為分別為正大、正小、零、負小、負大,采用LP、P、Z、N、LN分別進行表示,模糊調節器的輸出為剛度系數△Kd和阻尼系數△Bd,且基本論域設為△Bd,△Kd=[-20,20]此時最優阻尼和最優剛度為:
3 系統分析與仿真實驗
為了證明所提方法的有效性,分別采用分數階自適應導納控制和整數階導納控制,設置不同對照組實驗。基于模糊分數階自適應導納控制器,仿真時設置跟蹤的軌跡為正弦信號。
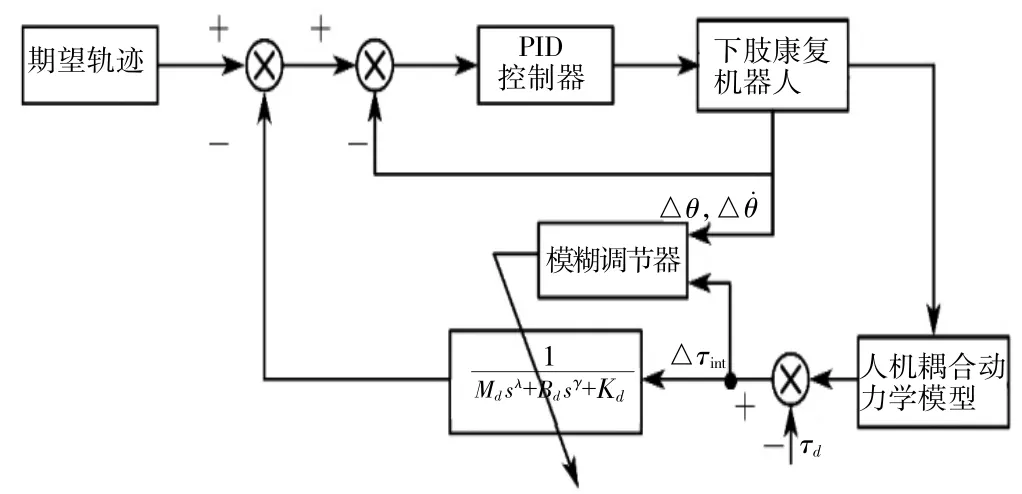
圖3 下肢康復機器人的主動柔順控制方案
如圖4所示,分別為分數階自適應導納控制與固定導納控制仿真后的軌跡誤差,可以發現,在使用分數階參數與模糊規則后軌跡誤差降低,平均誤差降低0.012 m,這使得外骨骼與機器人更加協同運動,使康復過程更加平穩。圖5為在不同控制器下的人機交互力曲線,在使用分數階自適應導納參數控制器的情況下,交互力明顯減小,受試者在康復訓練過程中更加平穩。當受試者的肢體剛度變大,施加的交互力增加,此時需要提高訓練強度,讓康復機器人適應患者的肢體,最大程度的進行鍛煉;當患者訓練疲勞時,肢體剛度變小,此時需要外骨骼機器人的訓練強度降低,順應患者的運動,避免出現相互對抗的情況即交互力增大。
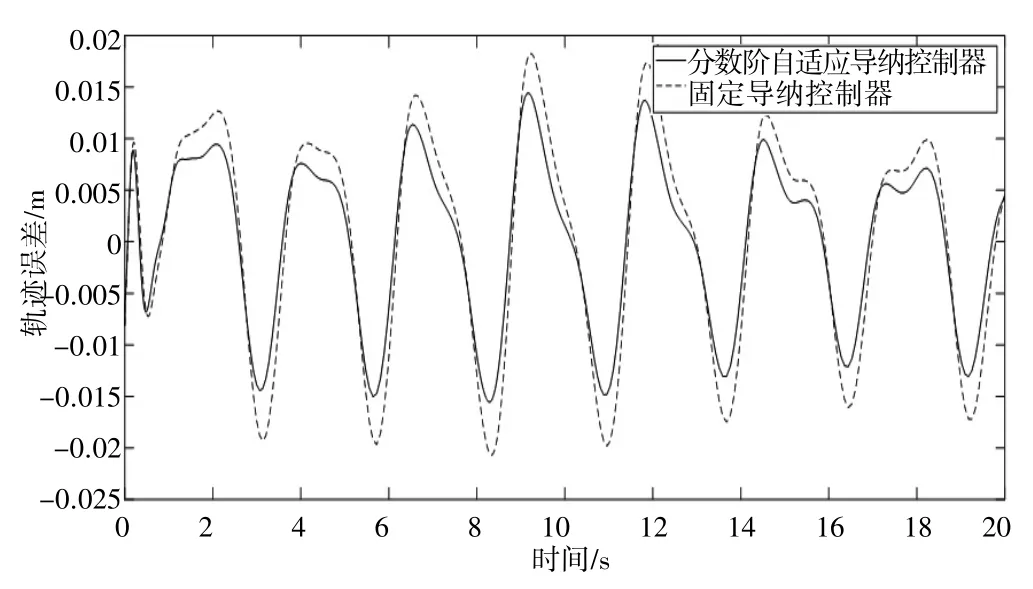
圖4 仿真后的軌跡誤差
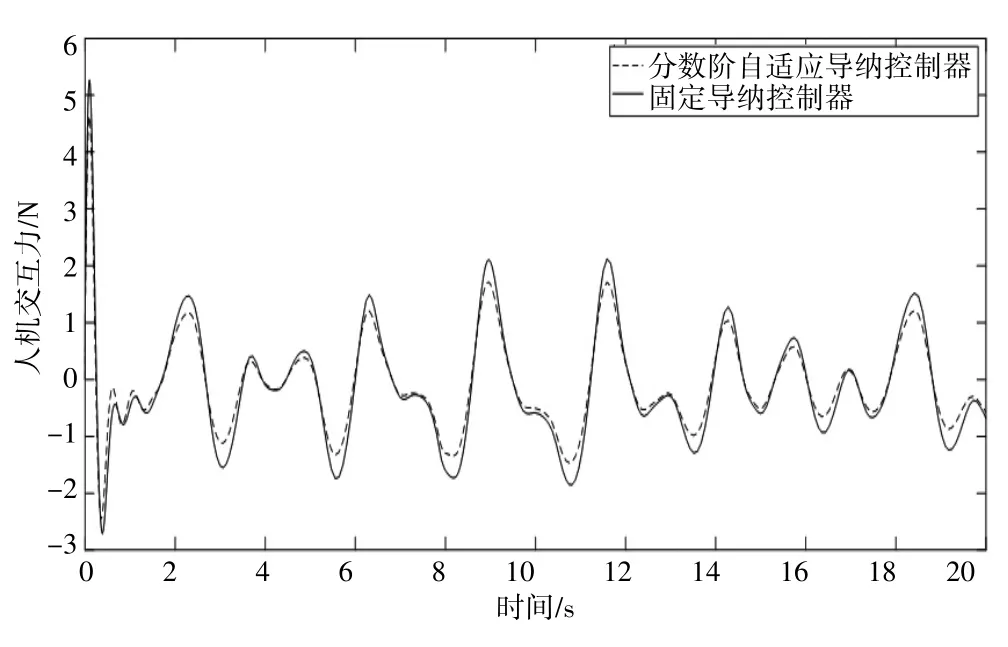
圖5 仿真后的人機交互力
4 結語
考慮到穿戴式外骨骼機器人與患者之間運動柔順性差的問題,而提出一種基于模糊控制的分數階自適應導納控制方法,并在MATLAB/Simulink平臺進行仿真實驗。結果表明,該控制方法使用分數階參數可以有效提升跟蹤精度,同時利用模糊規則自適應調節導納控制的阻尼和剛度,使得人機交互力顯著下降,使得人機之間更加柔順,避免出現安全問題,也極大提高了患者康復訓練的積極性,為后續樣機控制策略提供了理論基礎。
猜你喜歡
康復(2023年11期)2023-11-20 07:45:54
康復(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護理與康復(2021年2期)2021-03-05 08:10:44
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復醫學(2017年7期)2017-01-16 01:11:02
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45