標(biāo)定板尺寸對激光雷達(dá)與相機(jī)聯(lián)合標(biāo)定結(jié)果的影響
2023-01-12 03:57:10史哲慧關(guān)志偉許圣潔朱伯青
裝備制造技術(shù) 2022年10期
史哲慧,關(guān)志偉,陳 強(qiáng),許圣潔,朱伯青
(天津職業(yè)技術(shù)師范大學(xué),天津 300222)
0 引言
隨著現(xiàn)代技術(shù)的不斷發(fā)展,智能汽車上單一傳感器已無法單獨(dú)可靠地完成感知車輛周圍環(huán)境信息的任務(wù),多傳感器的信息融合可以打破單一傳感器的局限性,提高系統(tǒng)的魯棒性,擴(kuò)展時(shí)間和空間的覆蓋率,從而更全面準(zhǔn)確地感知環(huán)境空間[1]。其中,視覺傳感器主要通過相機(jī)采集圖像和視頻數(shù)據(jù),提取重要的可見信息;激光雷達(dá)主要發(fā)射光束獲取反射回波,提取周圍環(huán)境的點(diǎn)云信息。激光雷達(dá)與相機(jī)的融合感知能夠同時(shí)獲得物體的深度信息和色彩紋理信息,廣泛用于目標(biāo)檢測和高精定位等領(lǐng)域[2,3]。
然而,兩者數(shù)據(jù)融合的處理前提是對它們進(jìn)行了有效且可靠的聯(lián)合標(biāo)定。Ashesh Jain等[4]指出,精確的標(biāo)定對于進(jìn)一步的處理步驟至關(guān)重要,比如傳感器融合、實(shí)現(xiàn)算法的障礙檢測、定位以及控制等。Kaiser等[5]將激光雷達(dá)與相機(jī)傳感器之間的剛性位移的估計(jì)問題,歸結(jié)為一組平面和線在三維空間中的配準(zhǔn)問題,提出了一種新的標(biāo)定算法。俞德崎等[6]利用ArUco標(biāo)簽確定標(biāo)定板與相機(jī)坐標(biāo)系間的關(guān)系,通過隨機(jī)采樣一致性算法提取紙板角點(diǎn)以建立對應(yīng)關(guān)系,采用Kabsh算法求解最有配準(zhǔn)參數(shù)。韓正勇等[7]將外參標(biāo)定轉(zhuǎn)為三維空間矩陣旋轉(zhuǎn)縮放問題的求解,利用較少幀數(shù)即可獲得高精度外參矩陣。Geiger等[8]提出棋盤上的圖案很容易被相機(jī)識(shí)別,其本身也很容易被距離傳感器檢測到,利用棋盤格作為攝像頭和距離傳感器之間的標(biāo)定任務(wù)的目標(biāo),取得了良好效果。本文采用傳統(tǒng)棋盤格聯(lián)合標(biāo)定法,將不同尺寸的棋盤格作為標(biāo)定板采集數(shù)據(jù)并建立方程,計(jì)算參數(shù)從而獲取標(biāo)定結(jié)果,進(jìn)而對比分析標(biāo)定板尺寸對激光雷達(dá)與相機(jī)聯(lián)合標(biāo)定結(jié)果的影響。
1 標(biāo)定原理
不同的傳感器有各自獨(dú)立的坐標(biāo)系和不同的采集頻率,實(shí)現(xiàn)融合的前提是將各自的坐標(biāo)系數(shù)據(jù)轉(zhuǎn)換到同一坐標(biāo)系并配準(zhǔn)時(shí)間。激光雷達(dá)與相機(jī)的聯(lián)合標(biāo)定是為了找到同一時(shí)刻激光點(diǎn)云數(shù)據(jù)和圖像中對應(yīng)的像素點(diǎn)[9]。激光雷達(dá)坐標(biāo)系以激光雷達(dá)幾何中心為原點(diǎn),表示為[XL,YL,ZL],視覺傳感器(以相機(jī)為例)存在3個(gè)坐標(biāo)系:相機(jī)坐標(biāo)系以相機(jī)光心為原點(diǎn),用來描述物體與相機(jī)的相對位置,可表示為[XC,YC,ZC];圖像坐標(biāo)系以相機(jī)光軸與圖像平面交點(diǎn)為原點(diǎn),可表示為[X,Y];像素坐標(biāo)系可表示為[u,v]。聯(lián)合標(biāo)定的本質(zhì)問題是表示空間坐標(biāo)旋轉(zhuǎn)的矩陣R和表示空間坐標(biāo)平移的矩陣T的求解問題[10],如圖1所示。

圖1 激光雷達(dá)與相機(jī)的聯(lián)合標(biāo)定
空間坐標(biāo)旋轉(zhuǎn)的矩陣R和表示空間坐標(biāo)平移的矩陣T的求解坐標(biāo)變換過程包括以下3個(gè)步驟:
第1步:從激光雷達(dá)坐標(biāo)系轉(zhuǎn)換為相機(jī)坐標(biāo)系,可以用旋轉(zhuǎn)矩陣R和平移矩陣T表示,如式(1)所示。
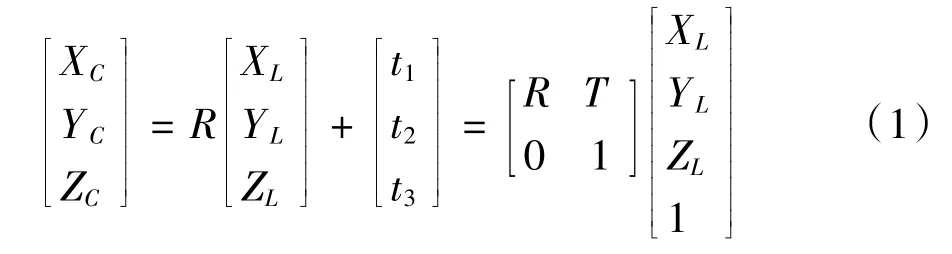
第2步:相機(jī)坐標(biāo)系轉(zhuǎn)換至圖像坐標(biāo)系,是將三維坐標(biāo)系轉(zhuǎn)換至二維坐標(biāo)系,其中f為相機(jī)焦距,如式(2)所示。
第3步:圖像坐標(biāo)系到像素坐標(biāo)系之間的關(guān)系,如式(3)所示。其中dx,dy為x,y軸的像素轉(zhuǎn)換單位(mm/Pixel),u0,v0為投影屏幕中心相對于光軸出現(xiàn)的偏移。

將式(1)~(3)整理,得到激光雷達(dá)與相機(jī)的坐標(biāo)轉(zhuǎn)換關(guān)系為式(4)所示。

以棋盤格標(biāo)定板上的坐標(biāo)點(diǎn)空間坐標(biāo)及相應(yīng)的圖像成像點(diǎn)坐標(biāo)聯(lián)立方程組,即可計(jì)算出空間坐標(biāo)旋轉(zhuǎn)的矩陣R和表示空間坐標(biāo)平移的矩陣T。
2 標(biāo)定結(jié)果的評(píng)價(jià)指標(biāo)
本文評(píng)定標(biāo)定結(jié)果的評(píng)價(jià)指標(biāo)選用重投影誤差。重投影誤差指真實(shí)三維空間點(diǎn)在圖像平面上的投影(真實(shí)的像素點(diǎn))和重投影(計(jì)算值得到的虛擬像素點(diǎn))的差值。由于計(jì)算得到的值和實(shí)際情況不完全相同,故需要將差值的和最小化以獲取最優(yōu)的相機(jī)位姿參數(shù)及三維空間點(diǎn)的坐標(biāo)[11]。使用重投影誤差作為評(píng)價(jià)指標(biāo),可以兼顧矩陣的計(jì)算誤差和圖像點(diǎn)的測量誤差,有利于提高判斷的精確度。
記P為棋盤格角點(diǎn)的位置,將m個(gè)棋盤格角點(diǎn)記為P(jj∈(0,m-1)),假設(shè)所有角點(diǎn)都可被檢測到。利用標(biāo)定參數(shù)將Pj從第i個(gè)位姿投影至圖像上,得到虛擬的像素點(diǎn),對應(yīng)真實(shí)的原始像素點(diǎn)為Pij,記重投影誤差為E,則計(jì)算公式如式(5)所示:

3 標(biāo)定實(shí)驗(yàn)
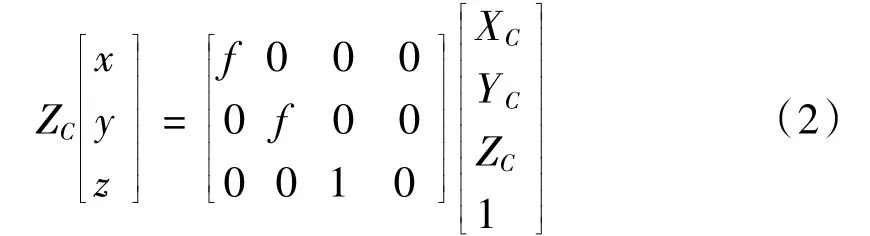
實(shí)驗(yàn)過程中,使用USB接口攝像頭和Velodyne16線激光雷達(dá)分別采集相機(jī)圖像數(shù)據(jù)和激光雷達(dá)點(diǎn)云數(shù)據(jù),基于ROS(Robot operating system)操作系統(tǒng)在Linux環(huán)境下進(jìn)行。相機(jī)具體參數(shù)見表1,雷達(dá)具體參數(shù)見表2。標(biāo)定實(shí)驗(yàn)所用激光雷達(dá)與相機(jī)的相對位置保持固定不變,安裝關(guān)系如圖2所示。相機(jī)垂直固定在激光雷達(dá)下側(cè)3 cm處。
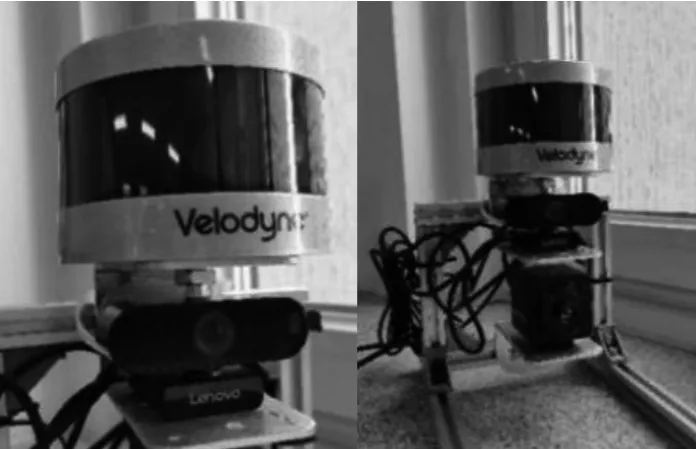
圖2 相機(jī)與激光雷達(dá)的安裝位置
表1 相機(jī)主要參數(shù)
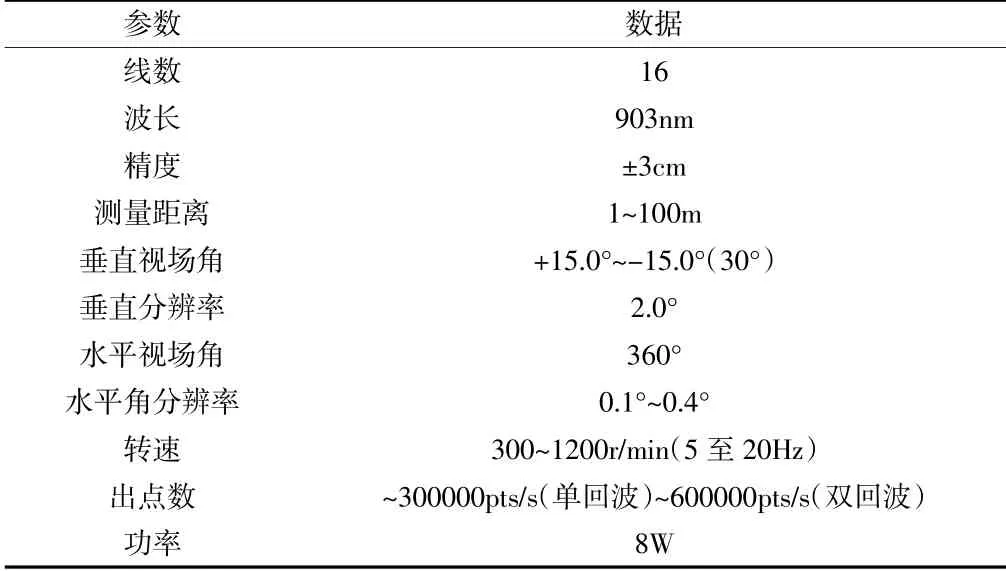
表2 激光雷達(dá)主要參數(shù)
實(shí)驗(yàn)過程中利用Autoware的標(biāo)定工具箱,按照張正友標(biāo)定法對相機(jī)先進(jìn)行標(biāo)定。Autoware是世界上第一個(gè)用于自動(dòng)駕駛汽車的“多合一”開源軟件,建立在機(jī)器人操作系統(tǒng)(ROS)上。它包括駕駛自動(dòng)駕駛汽車的所有必要功能,從定位和對象檢測到路線規(guī)劃和控制,包括傳感器的校準(zhǔn)和融合。
實(shí)驗(yàn)過程中,采用12×9棋盤格標(biāo)定板,如圖3所示。
圖3 棋盤格標(biāo)定板
3.1 相機(jī)標(biāo)定
在ROS環(huán)境下進(jìn)行相機(jī)的內(nèi)參標(biāo)定,棋盤格的單個(gè)格子邊長為20 mm。使用相機(jī)采集了20張棋盤格在不同方位的圖像進(jìn)行校準(zhǔn),如圖4所示。
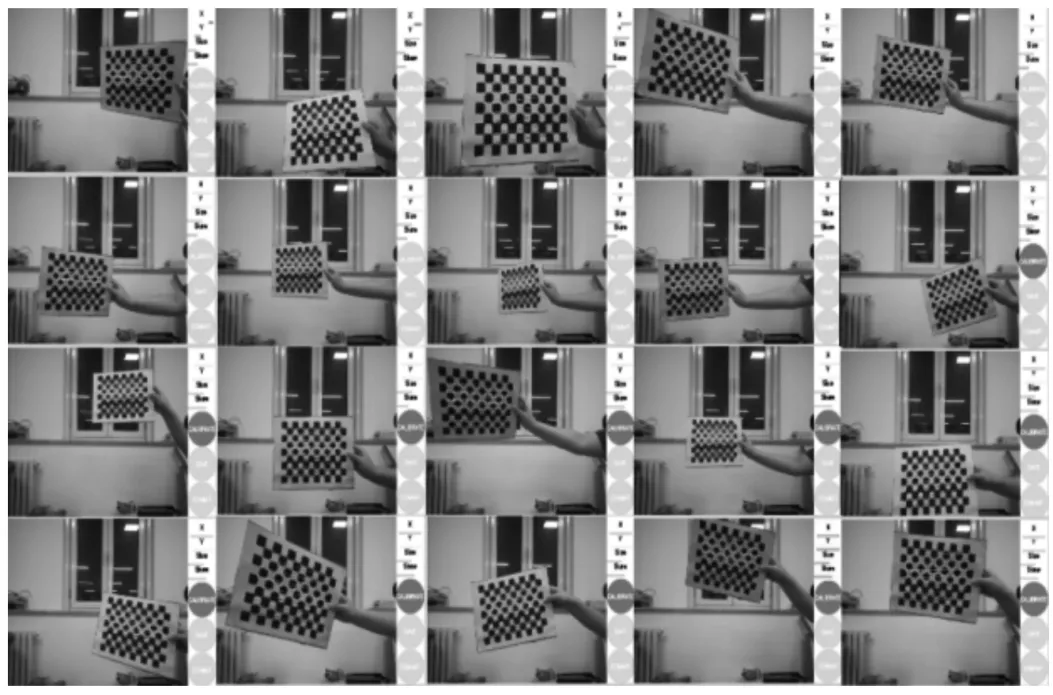
圖4 相機(jī)校準(zhǔn)
相機(jī)內(nèi)參標(biāo)定結(jié)果為:
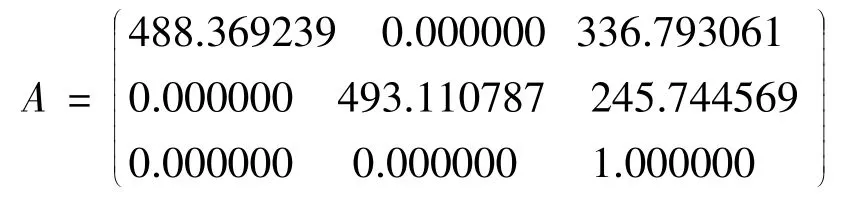
3.2 聯(lián)合標(biāo)定
實(shí)驗(yàn)中固定了激光雷達(dá)與攝像頭的相對位置和絕對位置,手持標(biāo)定板在兩者前方0.8 m和1.5 m處移動(dòng)變換,在左、中、右3個(gè)位置分別做出將標(biāo)定板正對相機(jī)、左傾斜、右傾斜、上傾斜、下傾斜5個(gè)動(dòng)作,共30個(gè)位姿以供傳感器采集數(shù)據(jù),如圖5所示。利用Autoware的標(biāo)定工具箱抓取同一時(shí)刻下不同位姿的圖像及對應(yīng)點(diǎn)云,選取30對數(shù)據(jù)進(jìn)行聯(lián)合標(biāo)定,通過對內(nèi)角點(diǎn)檢測與標(biāo)定板中心點(diǎn)云進(jìn)行手動(dòng)標(biāo)定,求得標(biāo)定外參及重投影誤差。每種標(biāo)定板做3組實(shí)驗(yàn),取重投影誤差最小、融合效果最好的一組作為最終實(shí)驗(yàn)結(jié)果。

圖5 不同位姿的圖像采集
小尺寸標(biāo)定板中單個(gè)格子邊長為20 mm,大尺寸標(biāo)定板單個(gè)格子邊長為60 mm。小尺寸標(biāo)定板的標(biāo)定結(jié)果如圖6所示,左圖為相機(jī)采集的圖像數(shù)據(jù),右圖為同一時(shí)刻下激光雷達(dá)采集的點(diǎn)云數(shù)據(jù),可以看到標(biāo)定的點(diǎn)云投影至在圖像上時(shí)分散至標(biāo)定板外。大尺寸標(biāo)定板的標(biāo)定結(jié)果如圖7所示,點(diǎn)云能夠全部投影至標(biāo)定板上,重投影效果優(yōu)于小尺寸標(biāo)定板的標(biāo)定結(jié)果。

圖6 小尺寸標(biāo)定結(jié)果
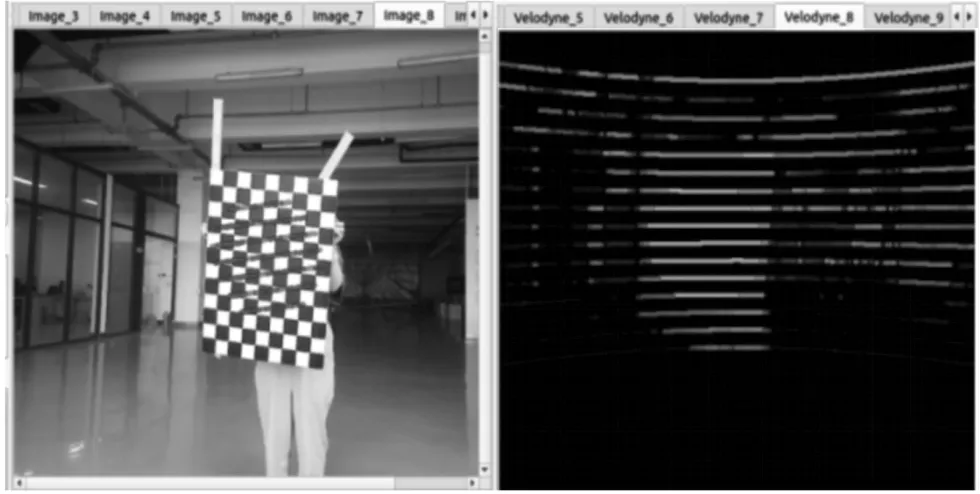
圖7 大尺寸標(biāo)定結(jié)果
選用邊長為20 mm的小尺寸標(biāo)定板和邊長為60 mm的大尺寸標(biāo)定板時(shí),3組實(shí)驗(yàn)的重投影誤差見表3,小尺寸標(biāo)定板的重投影誤差平均值為1.195179pixel,大尺寸標(biāo)定板的重投影誤差平均值為0.402618pixel。選用尺寸較大的標(biāo)定板,可有效提高激光雷達(dá)與相機(jī)聯(lián)合標(biāo)定的精度。
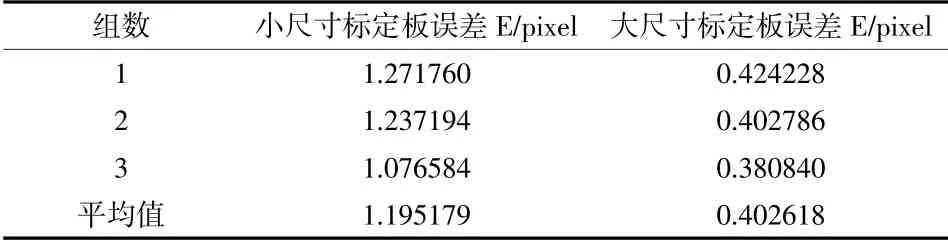
表3 實(shí)驗(yàn)重投影誤差對比
激光雷達(dá)與相機(jī)聯(lián)合標(biāo)定后的數(shù)據(jù)融合效果如圖8所示,左邊為小尺寸標(biāo)定板的融合效果,右邊為大尺寸標(biāo)定板的融合效果。從圖8可以看出,左圖的點(diǎn)云在圖像上分布散亂,周圍環(huán)境的點(diǎn)云與標(biāo)定板的點(diǎn)云分界不明確;右圖的點(diǎn)云分布均勻,能夠分辨出周圍環(huán)境與標(biāo)定板的分界線,能夠?yàn)閭鞲衅魅诤蠈φ系K物的檢測奠定基礎(chǔ)。
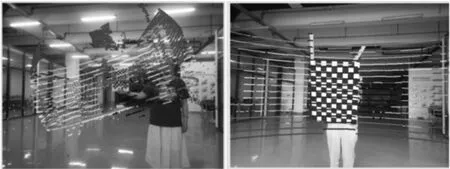
圖8 融合效果
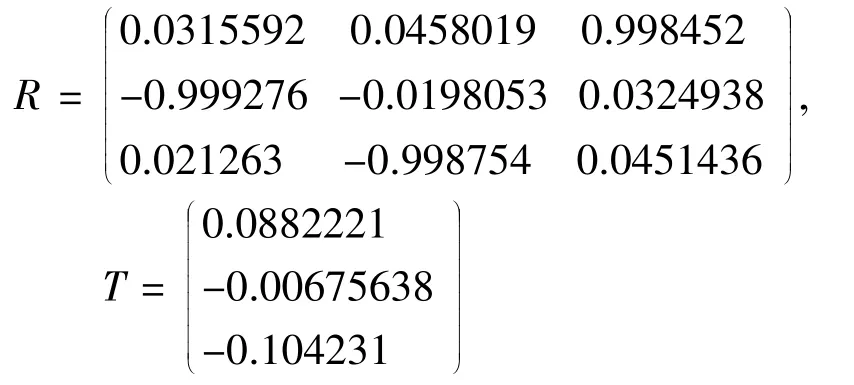
最終小尺寸標(biāo)定板融合效果的點(diǎn)云分散不成形;大尺寸標(biāo)定板融合的點(diǎn)云清晰,最終標(biāo)定的重投影誤差為0.38084,激光雷達(dá)與相機(jī)聯(lián)合標(biāo)定的空間坐標(biāo)旋轉(zhuǎn)的矩陣R和表示空間坐標(biāo)平移的矩陣T結(jié)果為:
4 結(jié)語
為探究標(biāo)定板尺寸對激光雷達(dá)與相機(jī)的外參聯(lián)合標(biāo)定是否存在影響,本文首先對相機(jī)進(jìn)行了內(nèi)參的校準(zhǔn),然后通過對單格邊長分別為20 mm和60 mm兩種尺寸的12×9的棋盤格標(biāo)定板分別進(jìn)行了3組聯(lián)合標(biāo)定實(shí)驗(yàn),每組實(shí)驗(yàn)選取30對數(shù)據(jù),最后,對比分析了重投影誤差,選用邊長為20 mm的小尺寸標(biāo)定板和邊長為60 mm的大尺寸標(biāo)定板時(shí),重投影誤差平均值分別為1.195179pixel和0.402618pixel。實(shí)驗(yàn)結(jié)果表明,大尺寸的標(biāo)定板比小尺寸標(biāo)定板的標(biāo)定結(jié)果更好,重投影誤差更小,魯棒性更高。
- 裝備制造技術(shù)的其它文章
- 露天鑿巖鉆機(jī)的發(fā)展現(xiàn)狀分析和我國的整體優(yōu)化發(fā)展方向
- 現(xiàn)代通信技術(shù)專業(yè)實(shí)訓(xùn)基地多元化建設(shè)探討
- 職業(yè)教育現(xiàn)代學(xué)徒制成本分擔(dān)機(jī)制探討
——以廣西職業(yè)教育電氣設(shè)備運(yùn)行與控制專業(yè)群為例 - 職業(yè)教育聯(lián)盟“學(xué)分銀行”建設(shè)存在問題與對策
——以全國應(yīng)急安全職業(yè)教育聯(lián)盟為例 - 面向卓越工程師的“機(jī)械制造技術(shù)基礎(chǔ)”課程教學(xué)改革與實(shí)踐
- 智能制造視域下高職智能控制技術(shù)專業(yè)群人才培養(yǎng)探索