AGV機器人越障與爬坡驅動力計算分析
2023-01-12 03:57:00王占山陳曉華吳美杰
裝備制造技術 2022年10期
王占山,陳曉華,趙 瑞,吳美杰,許 鑫
(1.蘇州工業職業技術學院,江蘇 蘇州 215104;2.北京理工大學,北京 100081)
0 引言
AGV(Automatic Guided Vehicle),是一種能夠實現自動引導,具有安全保護以及各種移載功能的無人駕駛運輸小車機器人,能夠按照路徑規劃和工作要求,精確地行走并停靠指定地點,自動完成一系列的工作[1]。其具有自動化水平高,工作效率高,可控性強,安全性好,節省人力成本等優點。隨著人民生活生產水平的提高,在工業生產、運輸、物流、巡檢以及生活服務等領域應用更加廣泛[2]。
2020-2026 年中國移動機器人AGV行業競爭格局及經營模式分析報告顯示,隨著AGV在各行各業的應用推廣,截至2019年,AGV機器人產品增量達到3.34萬臺,同比增長了12.84%,市場規模達到61.75億元[3]。據此可以預測未來一段時間內AGV機器人仍然以爆炸式增長,實現百億級的市場規模。
隨著市場需求的快速發展,滿足不同工作場景下的AGV機器人的設計研發工作迭代更加迅捷。因此如何正確獲取AGV機器人的動力參數,對其驅動機構的選型設計至關重要,但是這方面的系統研究論文相對較少,更多學者將研究聚焦到載人車輛的驅動參數計算。陳國鈺等[4]研究了四驅SUV爬坡性能,王曉[5]建立了汽車爬坡數學模型。本文針對AGV機器人不同工況下的運動情況,建立幾種常見工況下的受力模型,獲得AGV機器人在越障與爬坡下的最小動力需求。
1 案例研究對象
研究對象是四輪驅動AGV機器人(圖1),其技術參數條件如下:AGV機器人驅動輪采用8寸輪作為主動輪,輪轂外圓直徑約為200 mm,采用四輪驅動方式,額定行駛速度為4 km/h,最低行駛速度為2 km/h,最高行駛速度為6 km/h,計算獲得主動輪的轉速范圍為:53.1~159.2 r/min,平均轉速為106.2 r/min。
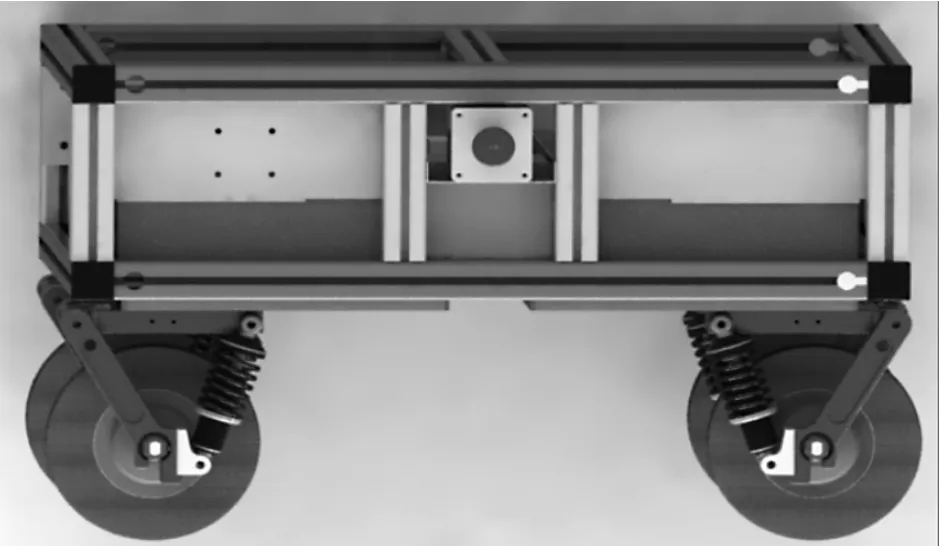
圖1 四輪驅動AGV機器人
車體自重40 kg,最大載荷20 kg,前后輪轂中心距離為L,前后主動輪中心到車體重心的距離分別為a,b,a=b=L/2。為方便計算將AGV機器人進行適當簡化,如圖2所示。
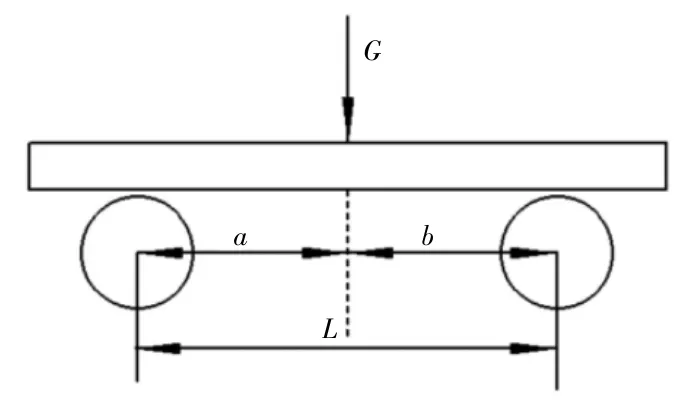
圖2 智能底盤簡化模型
2 不同工況下的受力分析
AGV機器人通常工作在室內環境,因此大多數情況在平整地面上行駛,但是考慮到可能會遇到小臺階或者坡度路況,因此本文從平整地面、垂直越障和爬坡三種工況下分別對其進行分析。
2.1 在平整地面上正常行駛
該情況下,AGV機器人從靜止狀態向勻速運動狀態轉變時,需要的輸出力矩最大。因此,可以將智能底盤簡化為為二維(圖3),進行受力分析。
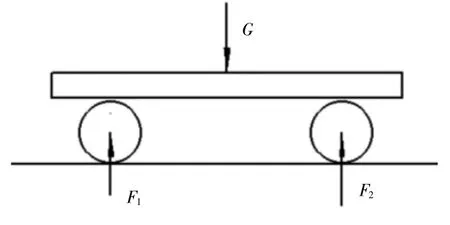
圖3 平整地面正常行駛的受力情況
智能底盤總體質量40 kg,載荷為20 kg,四輪支持重量為:

一側兩個輪組支撐一半的載荷。
根據受力分析,

由于a=b,則F1=F2=G/4L
查閱相關資料,參考汽車的整車輪胎與地面(柏油路)接觸附著力系數為0.8[6],但是考慮到智能底盤的整體設備的重量較小,輪胎材質較硬,二者正常工作時附著力系數應該小于汽車的輪胎與地面的附著力系數,但應該大于摩擦力系數0.3,因此在此我們粗略估算附著力為Φ≈0.4。
智能底盤的則地面整體阻礙力為:

單個輪組與地面的阻礙力占其中四分之一:
輪轂電機的輸出力矩為:

在平整柏油路面上勻速行駛時的輸出功率P1:
其中R表示轉速。
意味著在平面行駛的情況下,輸出功率與轉速成線性正比。
在額定轉速,額定輸出功率為P1=66.7 W。
2.2 在30°斜坡上啟動行駛
參考汽車相關資料,一般越野車輛以30°爬坡作為參考爬坡角度值,因此智能底盤也以30°下的爬坡能力(圖4)作為主動輪參數計算工況。
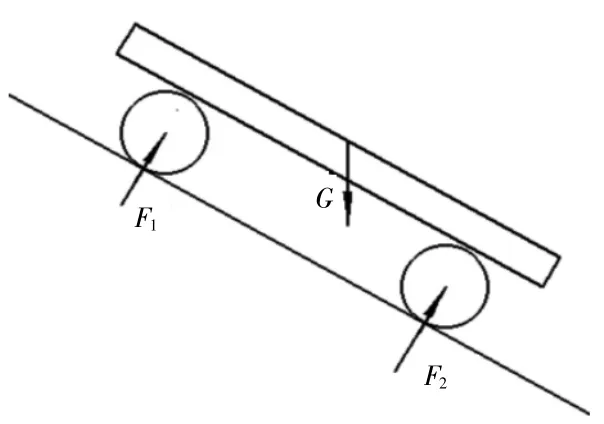
圖4 30°爬坡的受力情況
由于重心位于車體幾何中心,因此可以簡化模型,計算單一輪轂電機的受力情況。單個輪轂電機的承載重力:
單獨分析單一主動輪(圖5)的受力情況

圖5 30°爬坡的工況下單個主動輪受力情況
智能底盤AGV在爬坡時,輸出驅動的輪轂電機受力圖如上圖所示,勻速行駛時,受力平衡,力學平衡方程如下[7]:

其中FX是爬坡時,地面與輪轂電機的切向推動力,當輪胎與地面附著力足夠大的時候,驅動輪與地面不打滑。驅動輪轂電機的轉矩M1產生一個對地面的切向作用力Ft,地面對輪胎的反作用力即為爬坡行駛的切向推動力。
f1為輪轂電機運動時候的滾動阻力,計算公式如下:

其中在混凝土地面上路面滾動阻力系數f=0.014
Fj為坡道阻力,計算公式:
FW為空氣阻力,Fa為加速阻力,由于智能底盤在爬坡時車速較低,加速性能不做要求,因此為便于計算,空氣阻力和加速阻力忽略不計。
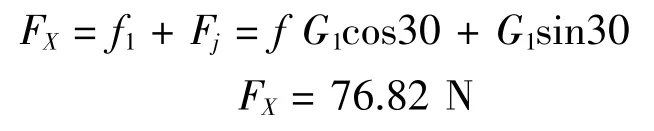
輪轂電機的輸出力矩為M1=FX r=7.682 N·m
則輸出功率為

2.3 垂直越障
根據參考文獻[8],在車體越障離地后,需要驅動力最大。對此時簡化如圖6所示進行受力分析。
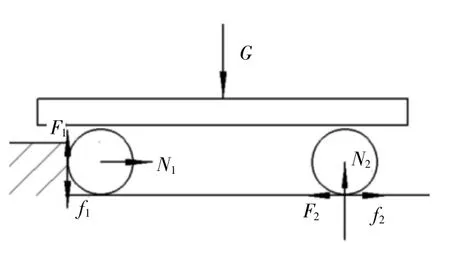
圖6 越障工況下受力分析
式中,F1為前輪附著力,f1、f2為滾動阻力,N1與N2為地面支撐力,道路附著系數?≈0.4,滾動阻力系數為.

其中f1=fN1,f2=fN2,F1≤?N1,F2≤?N2其中G=600 N。
計算獲得:N1=100.7 N,N2=261.1 N,F1=40.3 N,F2=104.4 N
此時后輪需要的驅動力最大,則輸出力矩為
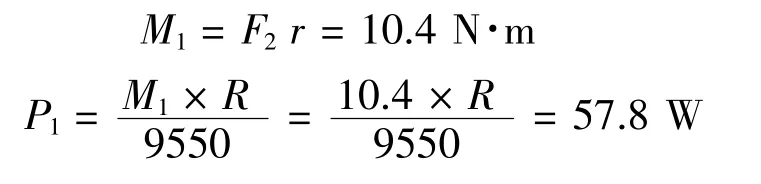
綜上所述,AGV機器人的輪轂電機的額定輸出扭矩和轉速應該涵蓋三種不同工況下計算所得輸出力矩和轉速要求。通過計算分析可知,AGV機器人在以額定轉速下運動時,輸出力矩要求達到6 N·m,轉速為106.2 r/min;在垂直越障時對力矩需求最大,轉速最慢,此時如果能夠完成越障,最大輸出力矩不能少于10.4 N·m,轉速為53.1 r/min。
3 產品校驗
為校驗該驅動力分析方法的可靠性,利用現有成熟產品參數進行校驗。采用網上購物所得的中菱科技4寸微型機器人輪轂電機為校驗對象。其技術參數見表1。

表1 中菱科技4寸微型機器人輪轂電機技術參數
該產品適用于服務機器人等設備,多用于平地場合行進,偶有爬坡工作需求,因此,利用平地行駛工況和斜坡攀爬工況對該輪轂電機參數進行校驗。
3.1 平地行駛工況
滿載情況下,單個輪轂電機承載25 kg,在啟動時從靜止狀態轉為勻速運動時,輪轂電機輸出力矩應當最大。通過計算可以得到該輪轂電機輸出力矩為5 N·m,小于表格1中最大力矩。
3.2 斜坡攀爬工況
正常情況下,服務機器人在室內工作時,遇到的斜坡角度都不大,斜坡為便于殘疾人輪椅行走,角度不大于5°。因此,以5°斜坡計算,服務機器人低速運行,輪轂電機承受滾動滾動阻力和坡道阻力。滿載情況下,該輪轂電機輸出力矩約為1.3 N·m,滿足表格1參數要求。
因此,通過計算中菱科技4寸微型機器人輪轂電機的性能參數合理,同時驗證了本文方法的可行性。
4 結語
本文以特定的一種AGV機器人為例,計算分析了平地、爬坡和越障三種不同工況下,AGV機器人正常行駛所需要的動力參數。明確了AGV機器人的動力參數的計算流程,為AGV機器人的設計工作提供了一種理論參考。