基于感應(yīng)無(wú)線的有軌機(jī)車定位控制關(guān)鍵技術(shù)研究
2023-01-09 13:59:46程望斌鄒湘怡唐慎欽歐沛欽邱宏燕喻朱婷
成都工業(yè)學(xué)院學(xué)報(bào) 2023年1期
程望斌,鄒湘怡,唐慎欽,歐沛欽,劉 源,邱宏燕,喻朱婷
(湖南理工學(xué)院 a.信息科學(xué)與工程學(xué)院;b.南湖學(xué)院,湖南 岳陽(yáng) 414006)
伴隨著有軌作業(yè)機(jī)車在工業(yè)現(xiàn)場(chǎng)的廣泛應(yīng)用,其自動(dòng)控制的技術(shù)要求和管理水平也面臨挑戰(zhàn)[1]。感應(yīng)無(wú)線技術(shù)的無(wú)接觸特性,能夠更好滿足有軌作業(yè)機(jī)車的工業(yè)生產(chǎn)要求,大大減少了工業(yè)生產(chǎn)的不便利,給鋼鐵生產(chǎn)、焦?fàn)t冶煉等帶來(lái)了極大改變。
然而,目前廣泛應(yīng)用的工業(yè)生產(chǎn)有軌作業(yè)機(jī)車仍存在定位不準(zhǔn)確、通信易受干擾、自動(dòng)化程度不高等缺陷,這與工業(yè)要求的安全生產(chǎn)、精準(zhǔn)定位和自動(dòng)生產(chǎn)不相稱。本文以感應(yīng)無(wú)線技術(shù)為基礎(chǔ),通過(guò)無(wú)接觸的感應(yīng)無(wú)線位置檢測(cè)和數(shù)據(jù)通信,實(shí)現(xiàn)有軌機(jī)車的精確定位,為實(shí)現(xiàn)更大規(guī)模的有軌作業(yè)機(jī)車定位控制和自動(dòng)走行控制奠定基礎(chǔ),可望在煉焦工業(yè)、鋼鐵生產(chǎn)等大型工業(yè)中得到廣泛應(yīng)用[2]。
1 有軌機(jī)車定位控制
在有軌機(jī)車作業(yè)中,為實(shí)現(xiàn)感應(yīng)無(wú)線機(jī)車定位控制,需解決感應(yīng)無(wú)線技術(shù)系統(tǒng)中的位置檢測(cè)和數(shù)據(jù)通信兩大難題:1)提高機(jī)車位置檢測(cè)精度;2)抑制數(shù)據(jù)通信中的同頻干擾。感應(yīng)無(wú)線技術(shù)系統(tǒng)的無(wú)接觸特性,既可保證移動(dòng)機(jī)車的靈活性,又能克服惡劣工業(yè)環(huán)境帶來(lái)的不利影響,還能保證位置檢測(cè)的準(zhǔn)確性和數(shù)據(jù)通信的可靠性。本文主要從提高位置檢測(cè)精度和提升數(shù)據(jù)通信質(zhì)量?jī)煞矫娉霭l(fā),進(jìn)行深入研究。
同時(shí),在鋼鐵、冶金等大型工廠,為實(shí)現(xiàn)高效、安全等生產(chǎn)要求,需構(gòu)建各類有軌作業(yè)機(jī)車“三位一體”的立體生產(chǎn)模型。其模型中主要包含中控機(jī)關(guān)、電纜排列和有軌機(jī)車三大核心部分[3]。有軌機(jī)車控制原理:機(jī)車由各自的天線箱發(fā)送信號(hào),中控室接收該機(jī)車當(dāng)前工作數(shù)據(jù)信息,并得到發(fā)送天線所處位置[4]。同時(shí),中控室根據(jù)機(jī)車運(yùn)行、工作要求和生產(chǎn)信息等,向各機(jī)車下達(dá)工作指令,進(jìn)而實(shí)現(xiàn)有軌機(jī)車的安全有序運(yùn)行[5]。
2 感應(yīng)無(wú)線位置檢測(cè)
有軌機(jī)車位置檢測(cè)的關(guān)鍵問(wèn)題是:1)編碼電纜中傳輸對(duì)線的科學(xué)設(shè)置;2)有軌機(jī)車位置的精確檢測(cè)。
2.1 位置檢測(cè)方法論證
2.1.1 傳輸對(duì)線
位置監(jiān)測(cè)中的傳輸對(duì)線有3種[6]:R、G、G′0。
1)對(duì)線R
R傳輸對(duì)線的標(biāo)準(zhǔn)長(zhǎng)度為L(zhǎng),采用分段安裝:對(duì)線僅在i段叉開(i=0,1,2,…),其他段雙絞。
2)對(duì)線G
對(duì)線G有n根:G0、G1、…、Gn-1,采用格雷碼方法交叉編制。R線標(biāo)長(zhǎng)和G線交叉最小間距決定了對(duì)線G根數(shù)n的大小。編碼電纜結(jié)構(gòu)如圖1所示。
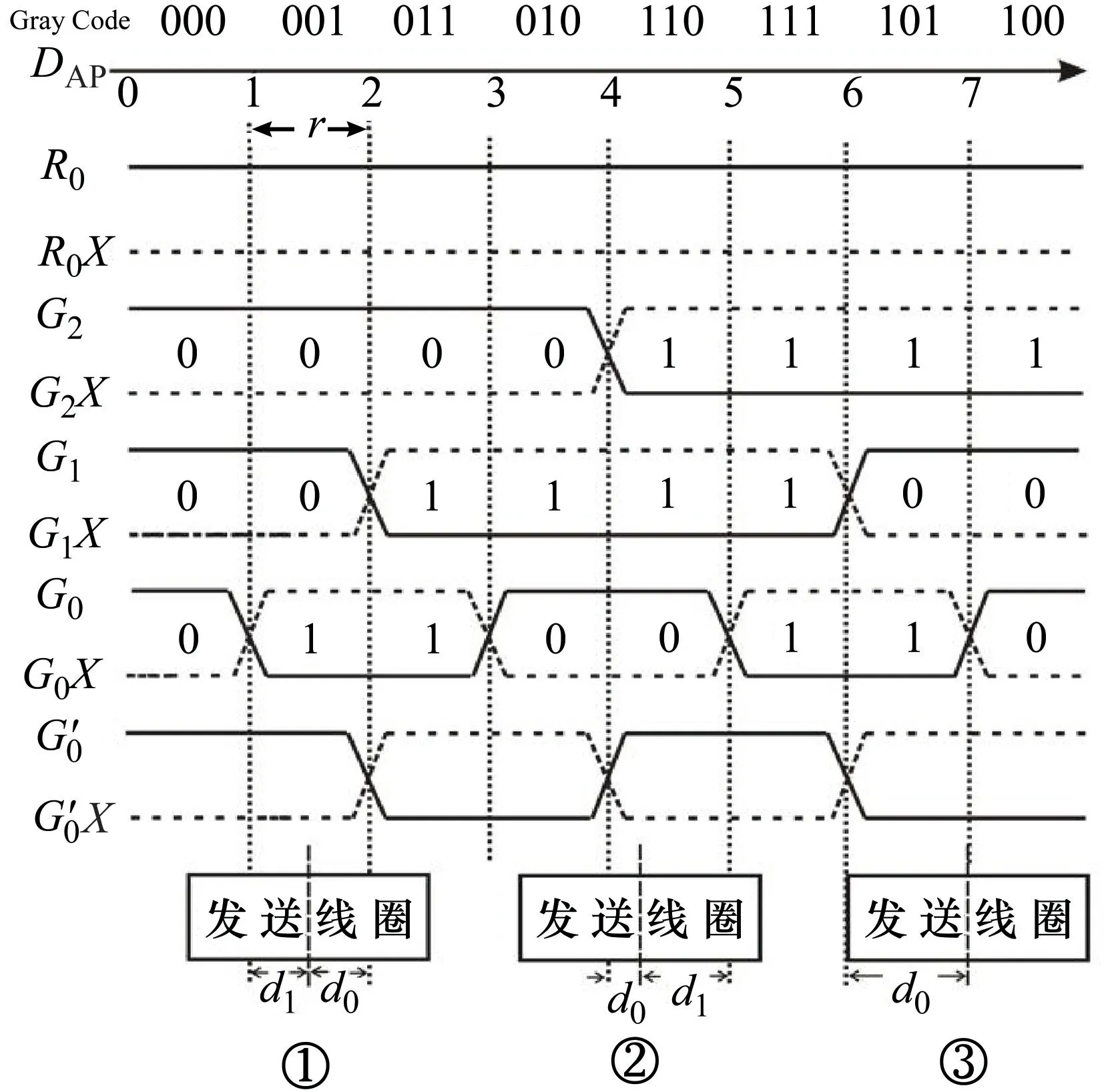
圖1 編碼電纜結(jié)構(gòu)
3)對(duì)線G′0
在圖1中,對(duì)線G′0和G0交叉間距(間距為2r)相同,但G′0交叉處與G0錯(cuò)開r距離。
2.1.2 一般位置檢測(cè)
利用發(fā)送線圈發(fā)送載波信號(hào),各傳輸對(duì)線將有感應(yīng)信號(hào)產(chǎn)生,感應(yīng)信號(hào)幅度最大的Ri傳輸對(duì)線說(shuō)明發(fā)送線圈在第i段位置。以最大感應(yīng)幅值Ri線的信號(hào)相位作基準(zhǔn)相位。其他對(duì)線G感應(yīng)信號(hào)與其比較,相位相同記Gj=0,反之Gj=1。
以3對(duì)傳輸對(duì)線G為例,若g為格雷碼G2G1G0的十進(jìn)制數(shù),可得一般位置檢測(cè)結(jié)果為:

式中:L為R傳輸對(duì)線標(biāo)準(zhǔn)長(zhǎng)度;i為感應(yīng)信號(hào)幅度最大Ri傳輸對(duì)線的位置段數(shù);g為3對(duì)傳輸對(duì)線對(duì)應(yīng)位置格雷碼G2G1G0的十進(jìn)制數(shù);r為對(duì)線G′0、G0相鄰交叉處間距(見(jiàn)圖1)。此時(shí),一般位置檢測(cè)DAP的檢測(cè)精度為r。
2.1.3 高分辨率位置檢測(cè)
設(shè)d0、d1為發(fā)送線圈的中心線偏離G0和G′02對(duì)線交叉中心的距離,G0、G′0對(duì)線的感應(yīng)電動(dòng)勢(shì)幅值[7]分別為A(G0)、A(G′0)。
則有:
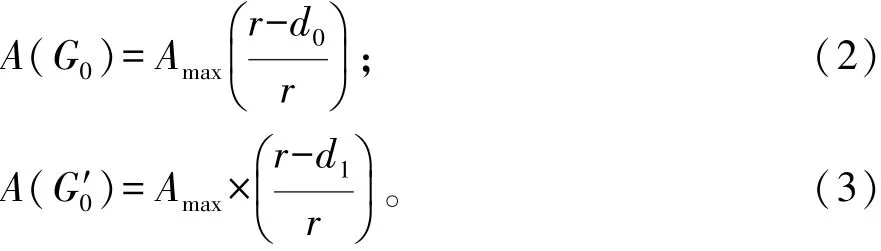
式中:Amax為G0、G′0對(duì)線最大感應(yīng)幅值。
令:
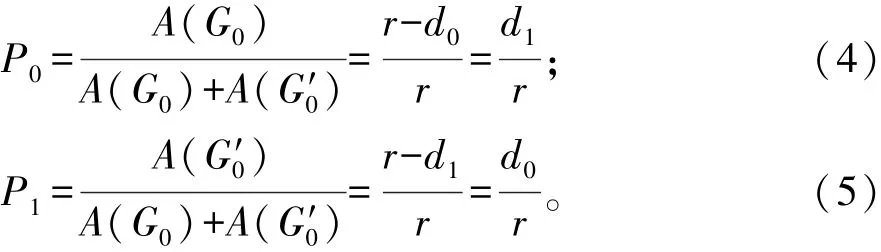
且:
1)若發(fā)送線圈中心線位于對(duì)線G02交叉點(diǎn)左半部(圖1位置①),此時(shí)DAP對(duì)應(yīng)的位置數(shù)據(jù)g為奇數(shù)1,則高分辨率位置檢測(cè)結(jié)果為:

2)若發(fā)送線圈中心線位于對(duì)線G′02交叉點(diǎn)左半部(圖1位置②),此時(shí)DAP對(duì)應(yīng)的位置數(shù)據(jù)g為偶數(shù)4,則高分辨率位置檢測(cè)結(jié)果為:

綜上所述,高分辨率位置檢測(cè)結(jié)果為:

綜上,可得綜合位置檢測(cè)結(jié)果為:

2.2 位置檢測(cè)實(shí)例分析
設(shè)機(jī)車處在第3段(即i=3),L=100 m,r=0.10 m。針對(duì)圖1線圈所處不同位置,有:
1)在①位置
G2G1G0=001,即g=1,DAP=L×i+g×r=300 100 mm,測(cè)得對(duì)線G0、G′0幅度均為0.5Amax,由式(4)~(9)可得:DHRP=50 mm,DAD=300 150 mm。
2)在②位置
G2G1G0=110,即g=4,同理可得DAP=300 400 mm,測(cè)得對(duì)線G0、G′0幅度:A(G0)=0.78Amax,A(G′0)=0.22Amax。則有:P0=0.78,P1=0.22,DHRP=22 mm,DAD=300 422 mm。
3)在③位置
測(cè)得A(G0)=0,A(G′0)=Amax,故P0=0,P1=1。此時(shí)G0感應(yīng)與R基準(zhǔn)信號(hào)相位相同或相反,相應(yīng)有G2G1G0=100或101。則有:①選G2G1G0=100(相同相位)。此時(shí)g=7,DAP=300 700 mm,DHRP=P0×r=0 mm,DAD=300 700mm。②選G2G1G0=101(相反相位)。此時(shí)g=6,DAP=300 600 mm,DHRP=P1×r=100 mm,DAD=300 700 mm。
綜上可知:綜合位置檢測(cè)DAD結(jié)果相同。
2.3 位置檢測(cè)實(shí)驗(yàn)與結(jié)果
2.3.1 位置檢測(cè)系統(tǒng)構(gòu)建
感應(yīng)無(wú)線位置檢測(cè)系統(tǒng)結(jié)構(gòu)如圖2所示。

圖2 感應(yīng)無(wú)線車上檢測(cè)位置系統(tǒng)基本結(jié)構(gòu)
移動(dòng)機(jī)車軌道旁安裝編碼電纜,天線箱隨機(jī)車移動(dòng),并與編碼電纜保持約100 mm間距,中控室向編碼電纜各對(duì)線分時(shí)發(fā)送載波,天線箱通過(guò)編碼電纜得到感應(yīng)信號(hào),位置檢測(cè)器進(jìn)而得到移動(dòng)機(jī)車位置。
2.3.2 位置檢測(cè)實(shí)驗(yàn)方法
實(shí)驗(yàn)方法:在編碼電纜任找1處反復(fù)移動(dòng)天線箱,使得檢測(cè)到的A(G′0)為最小。然后將天線箱在此附近每隔2 mm移動(dòng)1次,記錄每次所檢測(cè)的A(G0)和A(G′0),并根據(jù)檢測(cè)的數(shù)據(jù)計(jì)算出位置數(shù)據(jù):DHRP、DAD。同理,在其他位置作同樣測(cè)試。
設(shè)在起始位置有:A(G0)=30,A(G′0)=3 645,g=11,DAD=3 100 mm。部分檢測(cè)數(shù)據(jù)和計(jì)算結(jié)果如表1所示。其中誤差:

表1 位置檢測(cè)實(shí)驗(yàn)結(jié)果
2.3.3 位置檢測(cè)結(jié)果分析
實(shí)驗(yàn)數(shù)據(jù)與結(jié)果分析:
1)從起始位置開始移動(dòng)天線箱,在每個(gè)2 mm的位置范圍內(nèi),A(G0)和A(G′0)數(shù)值總會(huì)出現(xiàn)1次周期性變化;并且僅當(dāng)移動(dòng)的移動(dòng)距離達(dá)到2 mm(或2 mm的整數(shù)倍)時(shí),位置檢測(cè)器的數(shù)據(jù)顯示才穩(wěn)定(其他為不穩(wěn)定數(shù)據(jù))。故本系統(tǒng)的位置檢測(cè)精度可達(dá)2 mm。
2)地址DAD與實(shí)際值誤差較小,證明理論計(jì)算值與實(shí)際位置檢測(cè)比較符合。當(dāng)然在實(shí)際工業(yè)應(yīng)用中,對(duì)計(jì)算的DHRP還需進(jìn)一步修正。
3 感應(yīng)無(wú)線數(shù)據(jù)通信
感應(yīng)無(wú)線數(shù)據(jù)通信的質(zhì)量直接關(guān)系到有軌機(jī)車的定位控制,達(dá)到良好通信效果的關(guān)鍵在于抑制惡劣工業(yè)環(huán)境中的干擾,特別是其中的同頻干擾抑制。通常采用差分式天線裝置,并使用雙接收單傳輸線[8]。
3.1 雙傳輸線與單接收天線同間距交叉
在編碼電纜中使用2交叉通信傳輸線:發(fā)送天線和接收天線。其中,接收天線交叉多匝繞制,且有2個(gè)接收線圈1和2。各傳輸對(duì)線的交叉間距及發(fā)送線圈寬度均為200 mm(寬度為2r)。另外,另安排2對(duì)彼此交叉的通信對(duì)線,以避免出現(xiàn)信道死區(qū)和檢測(cè)盲區(qū)。
3.2 傳輸線接收的干擾抑制
當(dāng)發(fā)送天線中被加入信號(hào)電流后,在中控室可接收到通信傳輸線的信號(hào)。為抑制干擾噪聲,可將用于數(shù)據(jù)通信的傳輸對(duì)線每間隔一確定距離交叉。此時(shí)噪聲干擾的抑制效果可達(dá)5~30 dB。
3.3 接收天線的干擾抑制
接收天線采用雙線圈的交叉繞制,此時(shí)2個(gè)接收天線所處環(huán)境相同,故兩者感應(yīng)的干擾噪聲恰好大小相同、相位相反,兩者疊加后的感應(yīng)噪聲電動(dòng)勢(shì)為零,進(jìn)而消除接收天線中的噪聲干擾[9]。
過(guò)程推導(dǎo)如下:
設(shè)f0、f1為天線線圈中心位置偏離2個(gè)數(shù)據(jù)對(duì)線L0、L1的中心距離,且r=f0+f1。
設(shè)EL0、EL1為L(zhǎng)0、d0的感應(yīng)信號(hào)。為d0=d1=移相90°后的信號(hào),將Amax與EL0求和得合成信號(hào)分別為:
進(jìn)一步推導(dǎo)可得:
將E 的幅值對(duì)d0求導(dǎo),得:
當(dāng)d0=d1=時(shí)有最小幅值
E合成矢量如圖3所示。
圖3 合成信號(hào)E矢量圖
另外,當(dāng)采用2個(gè)接收線圈時(shí),2線圈干擾感應(yīng)電動(dòng)勢(shì)大小相等、相位相反,此時(shí)接收天線總的噪聲電動(dòng)勢(shì)為0。
4 有軌機(jī)車定位控制發(fā)展前景探討
有軌機(jī)車定位控制的最終目的是實(shí)現(xiàn)機(jī)車自動(dòng)走行。為達(dá)到機(jī)車自動(dòng)走行,除了需要采用雙差分技術(shù)抑制干擾,構(gòu)建同軌道多機(jī)車應(yīng)用和控制模式,還需構(gòu)建基于感應(yīng)無(wú)線的機(jī)車自動(dòng)走行控制系統(tǒng)。機(jī)車自動(dòng)走行控制設(shè)計(jì)關(guān)鍵:
1)多機(jī)車聯(lián)鎖控制。多機(jī)車協(xié)同作業(yè),采用定位控制與聯(lián)鎖控制策略。
2)系統(tǒng)多功能設(shè)計(jì)。采用計(jì)算機(jī)技術(shù)和可編程邏輯控制技術(shù),實(shí)現(xiàn)位置檢測(cè)、數(shù)據(jù)通信、語(yǔ)音提示和緊急處理等功能,從而達(dá)到系統(tǒng)設(shè)計(jì)多功能要求。
當(dāng)然,為實(shí)現(xiàn)機(jī)車自動(dòng)走行控制和全自動(dòng)要求,還需要完成不少工作,如增加外部設(shè)備、引入軟件技術(shù)、完善系統(tǒng)結(jié)構(gòu)和優(yōu)化綜合功能等。另外,為達(dá)到良好的實(shí)際應(yīng)用效果,還需采取屏蔽、接地等措施。
5 結(jié)論
有軌機(jī)車的自動(dòng)化和智能性在焦?fàn)t工業(yè)、大型鋼鐵生產(chǎn)中扮演越來(lái)越重要的角色。
本文研究的感應(yīng)無(wú)線位置檢測(cè)采用的是無(wú)接觸式感應(yīng)無(wú)線技術(shù),具有檢測(cè)精度高、干擾抑制能力強(qiáng)等優(yōu)勢(shì)。感應(yīng)無(wú)線位置檢測(cè)分辨率為2 mm,檢測(cè)精度達(dá)到機(jī)車定位控制要求;本研究的數(shù)據(jù)通信方法,能較好地克服工業(yè)惡劣環(huán)境中的同頻干擾,可用于有軌機(jī)車定位控制和自動(dòng)走行,具有可觀的市場(chǎng)應(yīng)用前景。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25