基于視頻識別和UWB定位的變電站作業(yè)現場安全識別方法
2023-01-05 03:45:10李金鑫陳家輝陳超人郜曉娜
電氣技術與經濟 2022年6期
李金鑫 徐 潤 陳家輝 陳超人 郜曉娜
(貴州電網有限責任公司遵義供電局)
0 引言
隨著電網的迅猛發(fā)展,現階段變電站施工或者檢修作業(yè)的工作量逐漸增多。施工單位的管理疏忽以及相關作業(yè)人員安全意識缺失等因素,都是造成變電站作業(yè)現場出現安全隱患的原因。而作業(yè)現場的安全問題不僅影響電網的穩(wěn)定運行,甚至嚴重威脅作業(yè)人員的生命安全。當下有眾多學者對此課題進行相關研究,常政威等通過圖像識別方法結合機器學習技術,開展電力作業(yè)現場人員的安全識別研究[1];郭宇等通過融合注意力機制結合深度學習技術,實現電力安全作業(yè)實體的有效識別[2]。但是上述變電站作業(yè)人員識別方法在實際應用中,存在識別精度較低的不足,為變電站運維以及安全管理增加了困難。
為了解決這一問題,本文基于視頻識別和UWB定位技術,針對變電站作業(yè)現場安全識別進行深入研究,以期提高作業(yè)現場的安全管理水平。
1 劃分變電站區(qū)域
變電站作業(yè)現場安全識別的原理是按照一定條件把變電站區(qū)域實現最小化劃分,然后通過遠程監(jiān)控等形式從各個子集區(qū)域中篩選出作業(yè)人員等信息,根據安全判定規(guī)則來判斷人員活動的安全風險。變電站內部區(qū)域包含運輸與行走的通道、變電設備等,所以本文通過通道區(qū)、設備區(qū)、所屬間隔等區(qū)域特征進行變電站區(qū)域的最小化劃分。利用變電站的各區(qū)域屬性,獲取變電站區(qū)域數學模型:

式中,S表示變電站的整個內部區(qū)域;Ss表示變電站內全部設備的安全范圍區(qū)域;St表示變電站內的全部通道區(qū)域;S500、S220、S35分別表示變電站內500kV、220kV、35kV電壓區(qū)域;Sz表示變電站內的主變設備區(qū)域。由式(1)和式(2)可知,根據變電站各區(qū)域屬性劃分的最終結果,其實就是把變電站整體區(qū)域轉換成多個單獨小區(qū)域的集合,且這些子集區(qū)域彼此之間存在聯系但又有一些屬性不同。當有子集區(qū)域具有多個不同屬性時,該子集在變電站全部區(qū)域的集合中呈不同層級的邏輯從屬關系。根據此模型對變電站區(qū)域進行最小化劃分,獲取的每個子集區(qū)域都是最小單元,不用再根據功能區(qū)別再次劃分,然后根據區(qū)域屬性區(qū)別,配置不同的安全風險識別裝置,以此實現對整個變電站作業(yè)現場的高效安全識別。
2 基于UWB定位作業(yè)人員
UWB[3]歷史悠久,一直受世界矚目,由于它用沖擊脈沖取代載波傳輸數據,定位精度較高且抗干擾能力較強,所以本文引入UWB技術,實現對變電站作業(yè)現場的人員定位。變電站作業(yè)現場的安全識別主要體現在,作業(yè)人員的穿戴是否符合施工要求、作業(yè)人員是否在指定區(qū)域范圍內進行施工、作業(yè)人員的行動軌跡是否在安全距離內等,而這些要求的前提就是對作業(yè)人員的精準定位。UWB定位原理就是測距與測向,且有三種不同形式的定位,根據兩個測量點接收信號到達的角度獲取發(fā)出信號的位置,這種定位形式易受多徑效應影響出現誤差;根據信號強度來獲取信號發(fā)出點的距離,這種定位形式易受衰減或遮蔽效應的影響出現誤差;根據三個測量點曲線到待測點的常數距離來定位,這種定位形式不用三個測量點接收作業(yè)人員信號的時間一致,只要保證三個參考點的時間同步就行,精度較高,最為常用,所以本文通過此方法實現變電站作業(yè)現場人員定位。設作業(yè)人員位置坐標為(x,y),那么:

式中,r1表示測量點1到作業(yè)人員的距離數據;r2表示測量點2到作業(yè)人員的數據;r3表示測量點3到作業(yè)人員的距離數據;x1與y1分別表示測量點1位置的橫縱坐標數據;x2與y2分別表示測量點2位置的橫縱坐標數據;x3與y3分別表示測量點3位置的橫縱坐標數據。并且式(3)可以簡寫為:

設測量點1為基礎測量點,距離差公式為:

式中,rn,1表示測量點2/3到作業(yè)人員距離與測量點1到作業(yè)人員距離的差值。結合式(4)可以得到:

由于式中x、y、r1是未知數據,所以此式可以轉化為線性方程組,以此實現對(x,y)的求解,獲取作業(yè)人員位置。通過UWB對變電站作業(yè)人員進行定位跟蹤,保障變電站作業(yè)現場安全。
3 提取視頻圖像中人員行為特征
在定位到作業(yè)現場的人員之后,接下來需要做目標分割[4],將視頻圖像中人員行為特征提取出來,以便判斷作業(yè)是否安全。首先在原始視頻圖像中提取出作業(yè)人員的原始真圖,如果由于攝像機沒有水平設置出現圖像傾斜的情況,需要先水平調整視頻圖像,通過連通技術獲取每個獨立連通圖塊的質心:
式中,xz、yz分別表示質心的橫縱坐標數據;w表示連通圖塊的寬度數據;h表示連通圖塊的高度數據;(x,y)表示圖塊像素點位置坐標;f表示形狀函數。然后通過Hough變換技術獲取將連通圖塊的傾斜趨勢,利用傾斜方向和垂直方向的夾角,將連通圖塊質心坐標進行旋轉操作,直到夾角為0停止旋轉,此時獲得水平的視頻圖像。通過灰度轉換公式將彩色的視頻圖像變?yōu)榛叶葓D像:
式中,R、G、B分別表示圖像像素的RGB顏色分項數據。再將灰度的視頻圖像進行二值化處理,二值化效果將直接影響圖像特征提取的效果,已經二值化的圖像需要去除圖像中多余的干擾,對圖像中人員粘連、重疊等情況做分割處理,按照設定的閾值,將連續(xù)大于設定值的區(qū)域找出來,就可以獲取作業(yè)人員水平方向的真實投影,一般情況下變電站作業(yè)人員呈站立姿態(tài),通過水平投影法,可以將圖像中人體分離,以此實現視頻圖像中人員行為特征的提取。
4 檢測作業(yè)人員行為安全
變電站作業(yè)現場的人員安全行為檢測屬于多目標的檢測工作,通過對作業(yè)人員的防護穿戴、行為動作和變電站設備等多個目標的檢測,來判斷變電站作業(yè)現場是否存在安全隱患。本文使用YOLOv3方法[5]進行檢測安全,此方法屬于單步目標檢測方法,可以實現較高精度的小目標檢測,所以需要將視頻中的作業(yè)人員行為安全分成兩個小的檢測目標,首先將作業(yè)現場攝像頭拍攝的視頻進行解碼操作,每隔50幀就抽取一幀圖像,通過文中上述內容將該幀圖像中的人員行為特征提取出來,先進行作業(yè)人員的防護穿戴的安全檢測,如果正常檢測到作業(yè)人員佩戴安全帽、防電手套等防護工作服,那么判定為合規(guī)作業(yè);如果未檢測到作業(yè)人員佩戴安全帽、防電手套等防護工作服,那么判定為不合規(guī)作業(yè)。再進行人員作業(yè)行為的檢測,通過檢測人員與危險區(qū)域的距離,判斷作業(yè)是否合規(guī),檢測的數學模型為:
5 評估作業(yè)風險程度
在變電站作業(yè)現場的安全識別中,關鍵的步驟就是對安全風險程度進行評估,將作業(yè)現場的危險性進行定性處理,便于作業(yè)團隊及時管理控制相關風險,保護變電站作業(yè)現場安全。為此本文引入格雷厄姆風險評估法:

式中,D表示變電站作業(yè)現場的風險程度定性值;L表示作業(yè)現場出現危險的可能性;E表示作業(yè)人員處于危險區(qū)域的頻率;C表示作業(yè)現場出現危險的嚴重性。如果變電站作業(yè)現場出現安全問題,并且出現作業(yè)人員的傷亡或者變電設備的損失,就可以將風險值定位在1~100之間,其中人員普通外傷與設備運行一般異常情況下,風險值為1,而人員死亡與特大設備事故情況下,風險值為100,通過風險值就可以獲取該變電站區(qū)域出現危險的嚴重性。由于L、E、C這三個數據會隨著變電站的實際作業(yè)環(huán)境而發(fā)生改變,所以不能直接用此處的D數據來表示作業(yè)的風險程度,還應該考慮到作業(yè)現場中風險程度的半定性值,半定性值就是不具備量綱的數據,此數據對作業(yè)風險程度也有一定的參考意義。所以本文結合格雷厄姆風險評估法,在變電站作業(yè)現場的安全識別時,通過獲取單一作業(yè)風險的平均值來定性風險程度,計算公式如下:
式中,Duv表示變電站作業(yè)現場中的第v個單一作業(yè)在第u步時出現危險時的風險值;i表示作業(yè)現場的單一作業(yè)總數;j表示單一作業(yè)的全部步驟數量;N表示變電站作業(yè)現場中包含的危險總數。根據此公式來獲取變電站作業(yè)現場的風險數據,可以科學合理地展示作業(yè)風險程度,當風險值在5~60范圍內,定義為一般危險;當風險值在60~85范圍內,定義為較大危險;當風險值超過85,定義為特大危險,然后施工管理人員根據此風險程度,及時制定應對策略。
6 實驗驗證
6.1 人員定位精度的對比
在本文所提的變電站現場安全識別方法中,兩個關鍵指標分別是人員定位精度與人員安全行為檢測準確度,所以為了驗證本文方法的有效性,進行與傳統方法的對比實驗,通過對比結果判斷本文方法的效果。本次實驗選取35個作業(yè)人員,首先將他們安置在35個不同且固定的坐標位置處,利用本文方法與傳統方法分別對其進行定位,定位結果如下圖所示。
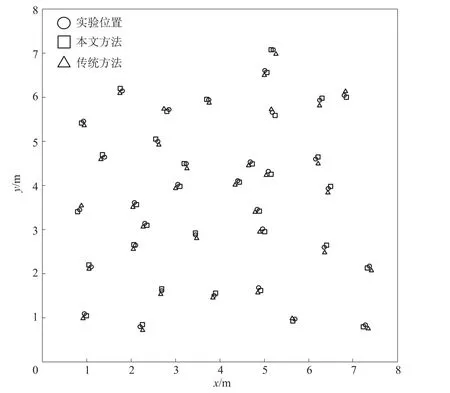
圖 定位結果對比圖
由圖可知,傳統方法的定位結果平均誤差為11.77cm,而本文方法的定位結果平均誤差為10.63cm,較傳統方法小1.14cm,說明本文方法的人員定位精度更高。
6.2 人員安全行為檢測準確度的對比
在這35個作業(yè)人員中隨機挑選一定數量的作業(yè)人員佩戴安全帽,利用本文方法與傳統方法分別進行人員安全行為檢測的對比實驗,調用檢測網絡識別作業(yè)人員是否佩戴安全帽,然后人工統計出兩種方法的識別準確率,其結果如下表所示。

表 檢測作業(yè)人員安全帽佩戴結果表
由此表可知,傳統方法的人員安全行為檢測準確率僅有80.11%,而本文方法的人員安全行為檢測準確率有93.37%,較傳統方法提高13.26%。由此驗證本文所提基于視頻識別和UWB定位的變電站作業(yè)現場安全識別方法是有效方法,且識別準確性較高。
7 結束語
本文在對變電站作業(yè)現場安全識別中,添加視頻識別及UWB定位技術,實現對現場作業(yè)人員的安全監(jiān)測,并且UWB技術可以適應變電站的復雜環(huán)境,精準定位作業(yè)人員,加強安全識別的準確性。但由于目前UWB定位技術未被我國大面積使用,導致UWB產品的價格較高。所以今后本文的安全識別方法還需要進一步優(yōu)化與完善,在保證識別精度的同時,節(jié)約成本,對提高電網安全具有重要意義。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
故事大王(2016年7期)2016-09-22 17:30:08
現代工業(yè)經濟和信息化(2016年5期)2016-05-17 05:35:57
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
河南電力(2015年5期)2015-06-08 06:01:45
電測與儀表(2015年5期)2015-04-09 11:30:52
兒童故事畫報(2013年3期)2013-06-24 05:40:30
