變速運動平臺上多旋翼無人機自主著陸控制方法研究
2022-12-28 14:15:54許有熊
長沙航空職業技術學院學報 2022年4期
關鍵詞:卡爾曼濾波
曹 寧,許有熊
(1.江蘇聯合職業技術學院,江蘇 蘇州 215000;2.南京工程學院 ,江蘇 南京 211167)
關鍵字:多旋翼無人機;變速運動平臺;模型預測控制(MPC)算法;自主著陸
多旋翼無人機高機動性及其懸停能力使其在巡檢、航拍、消防、軍事等眾多領域中廣泛使用,無人機在移動平臺的自主著陸成為各國飛行器研發領域的熱點,在變速運動平臺上的著陸更是本領域的前沿技術,具有廣闊應用場景。目前,針對基于移動平臺的無人機自主著陸的研究,金紅新等[1]提出了一種基于魯棒高階容積濾波的慣導/視覺相對導航方法,在仿真實驗中實現無人機與移動平臺相對位置、速度和姿態的估算,但其算法復雜、工程實現難度大;賈配洋等[2]提出改進的AprilTags算法計算出目標和相機之間的三維位置坐標和姿態數據,采用最小二乘法結合PID算法控制無人機對移動目標的智能識別、跟蹤及移動降落,但其穩定性不足;洪亮等[3]采用模糊預測同步視覺預測數據,提高卡爾曼濾波對無人機位姿估計的實時性,速度快但精度較低;修素樸等[4]通過解耦無人機的位置和姿態提升對無人機控制的穩定性并用5次多項式結合PID控制來規劃軌跡,實現無人機在斜面上或移動平臺的降落,但系統的穩定性和跟蹤精度有待提高;王曉海等[5]采用基于擴展的雙反饋模型預測控制算法設計控制器,以期解決固定翼無人機BTT的轉彎控制問題。綜上所述,一方面無人機自主降落過程涉及計算機視覺、控制算法、軌跡預測等知識,存在魯棒性差、控制響應延時等問題;另一方面,目前國內暫時對多旋翼無人機降落于勻速運動平臺的研究較為深入,鮮有對多旋翼無人機在變速運動平臺上著陸的控制方法做深入研究。
基于此,本文選擇多旋翼無人機的組合導航傳感系統確定與移動平臺相對位置,結合模型預測控制(MPC)算法實現無人機在變速運動平臺的自主著陸。該算法能夠顯式地考慮各種約束條件,并滾動實時控制輸入,具有設計簡單、魯棒性強、穩定性好等優點,故在多機協同領域中廣泛應用[6]。
1 自主著陸流程
一般來說,多旋翼無人機在移動平臺上的自主著陸流程[7]為通過GNSS導航及氣壓傳感器模塊采集信息,獲取無人機與移動平臺在大地坐標系中的位置矢量和速度矢量,通過坐標變換后將各種矢量參數轉化到統一坐標系中,經過卡爾曼濾波器提升各參數精度,并將濾波后的數據通過模型預測控制算法計算出無人機最優控制矢量。根據所得的計算結果實現多旋翼無人機的速度矢量和位置矢量調整,如此往復實現閉環控制,最終實現無人機在移動平臺上的自主著陸。總體流程如圖1所示。

圖1 無人機(UAV)自主著陸流程圖
2 自主著陸方法
2.1 著陸系統坐標定義
由于多旋翼無人機飛行速度低,無彈性形變,故可被視為六自由度剛體對象。為了能更精確地描述無人機與移動平臺的運動特性,在研究其運動軌跡時需要涉及多個不同坐標系,具體如下[8]:
(1)北東地坐標系(NED)。原點為無人機質心,遵循右手法則,z軸垂直于地球表面豎直向下,x軸指向地球正北方向,y軸指向正東方向。本文通過上標n表示矢量處于此坐標系。為便于后續算法的數據處理,無人機與移動平臺的各矢量參數統一至此坐標系后,再進行運算處理。
(2)地心地固坐標系(ECEF)。與地球固聯,隨地球一起旋轉,坐標系原點為地球質量中心,z指向地球北極,x指向格林尼子午面與赤道的交點,y軸位于赤道平面內正x軸東側90°方向,三個坐標軸相互正交。本文通過上標f表示矢量處于此坐標系。
(3)東北天坐標系(ENU)。原點為無人機質心,遵循右手法則,x軸指向東,y軸指向北,z軸指向天。本文通過上標e表示矢量處于此坐標系。
(4)大地坐標系(GCF)。廣泛應用于GNSS系統中。該坐標系用于經度、緯度和高度來描述接近地球表面的點的位置。本文通過上標ge表示矢量處于此坐標系。
2.2 多旋翼無人機著陸位姿信息獲取
無人機與移動平臺在大地坐標系中的位置矢量分別為:

其中,使用GPS傳感器測得地球經度λ與緯度Φ;用氣壓傳感器測得相對于海平面的高度h。
將Puge與Plge轉化為ECEF坐標系中對應的位置矢量[9]為:

通過文獻[9]中坐標轉換方法,可求出無人機和移動平臺在NED坐標系中的位置矢量分別為:

其中,Pfloc為無人機起飛點在ECEF坐標系中的坐標;Pfu為無人機當前在ECEF坐標系中的位置矢量;Pfl為移動平臺當前在ECEF坐標系中的位置矢量;和ωpu分別為無人機的測量誤差和高斯白噪聲;βnl/n和ωl分別為移動平臺的測量誤差和高斯白噪聲;為從ECEF到NED的轉換矩陣。
其中,loc和λloc分別為無人機起飛點的經度及緯度。
根據文獻[9]可得ENU坐標系到NED坐標系的轉換方法,則無人機和移動平臺在NED坐標系中的速度矢量為:

其中,通過GPS傳感器測量得到無人機和移動平臺在ENU坐標系中的速度矢量veu/e和vel/e;ωv為無人機和移動平臺速度矢量的高斯白噪聲;(Θne)為ENU坐標系到NED坐標系的轉換矩陣。
2.3 卡爾曼濾波器
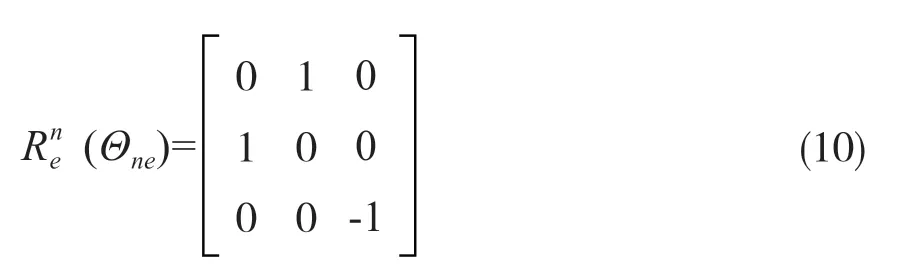
無人機中各傳感器干擾較為嚴重,直接測得的信號中夾雜大量噪聲,難以精準獲得無人機的位置矢量和速度矢量,需加入濾波算法提高其信號測量精度。卡爾曼濾波算法[10]是用狀態方程和遞推方法實現估算的常用濾波算法,在系統中的作用如圖2所示。
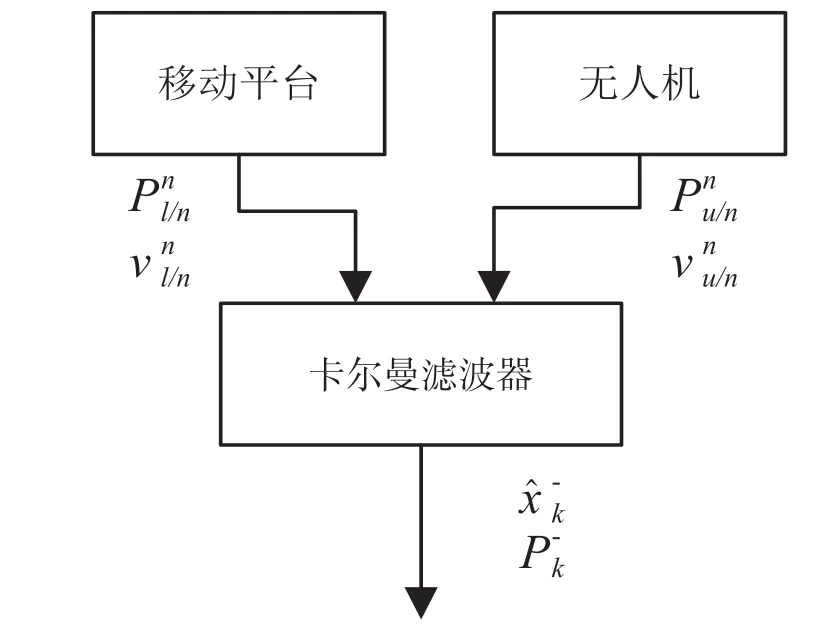
圖2 卡爾曼濾波器在系統中的應用
卡爾曼濾波器由預測模塊和更新模塊兩部分構成。在預測模塊中,卡爾曼濾波器產生當前狀態變量的估計值(x-k)及其不確定性(均方差矩陣 P-k);檢測到下一次測量結果(包含測量誤差及隨機噪聲)后,采用加權平均的方式更新估計值,更高確定性的狀態變量占更高權重。卡爾曼濾波算法利用當前觀測量和先驗估算量及相應不確定性矩陣進行一種實時遞歸線性最小方差無偏估計。同時,由于該算法為遞推算法,僅利用當前輸入測量值和前一步計算的狀態量及其不確定性矩陣實時運行,不需要額外過去信息。其建模流程如圖3所示。
圖3 卡爾曼濾波算法建模流程
其中,xk是在tk時刻的狀態矢量,在無人機自主降落于移動平臺的過程中,最重要的過程量即為兩者之間的相對位置矢量及移動平臺的速度矢量。故本系統中選取狀態變量為控制量為輸出量為和分別為輸入轉換矩陣,I是3×3的對角矩陣;0是3×3矩陣;Δt是對角元素為tk-tk-1的3×3對角矩陣。Qk為系統噪聲協方差矩陣,Rk為觀測噪聲協方差矩陣,兩者均為半正定矩陣,可以通過調整Qk和Rk的值來使濾波器獲得更好的性能。
2.4 模型預測控制(MPC)算法
為使無人機精準著陸,需要無人機與移動平臺的物理位置與速度高度一致。其矢量模型如圖4所示。
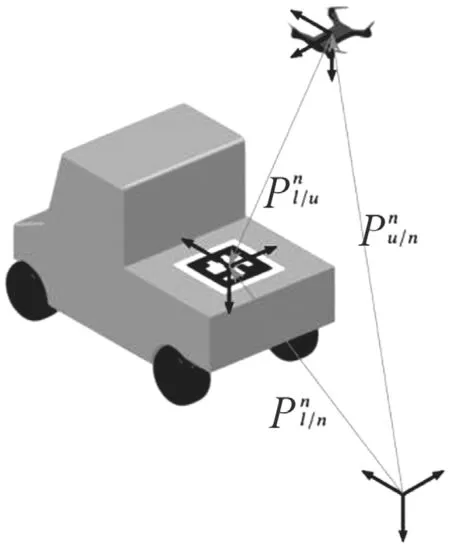
圖4 無人機自主降落矢量模型
此任務中的無人機著陸狀態數學模型為:
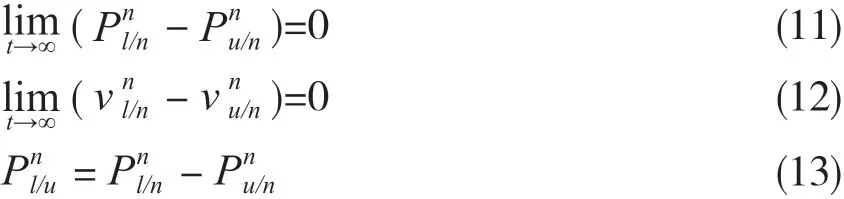
其中,Pnu/n是無人機所處位置矢量;vnu/n是無人機的速度矢量;vnl/n是移動平臺速度矢量;Pnl/n是移動平臺所處位置矢量;Pnl/u是無人機相對于移動平臺的位置矢量。為使無人機平穩降落于移動平臺上,須使無人機與移動平臺之間的距離和相對速度盡量趨近于零。將該系統離散化,狀態方程如下所示:

其中,k=tk+1-tk為單位時間步長,本研究中的單位時間步長為定值。在無人機自主降落過程中,考慮到對其速度矢量和加速度進行硬性約束,向量xlow,xhigh, ulow和uhigh分別為狀態量和輸入量的上下限。此外,向量uhigh和ulow分別為輸入變化的最大、最小值。Ak和Bk為轉換矩陣;xk是無人機系統狀態參量,uk為無人機系統輸入參量,代表含義如式(20)所示。

給出Ak和Bk矩陣:

I是3×3單位矩陣,0是3×3矩陣,所有元素都等于0,Δt是3×3矩陣,其對角線元素為相對時間步長tk-tk-1,本研究中的相對時間步長取固定值t,而非對角元素為0。本系統可視作時不變系統,則可在等式約束中建立離散時間模型,如下:

移動平臺的無人機自主著陸系統是典型的多約束系統[11],故選擇模型預測控制(MPC)算法對其控制。MPC算法控制過程如下:
(1)利用研究系統的預測信息優化求解,獲取有限時域內的最優控制序列,并將控制序列中第一組控制變量作為系統的控制變量。
(2)根據傳感器測得的當前實際輸出值,修正MPC模型預測的輸出值并重新求解最優控制序列,并實現閉環反饋。
(3)在下一時刻重復以上過程,實現滾動優化和閉環控制。
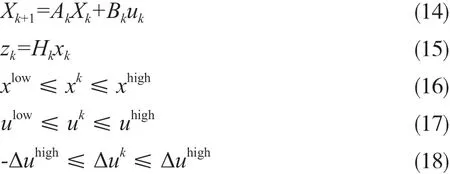
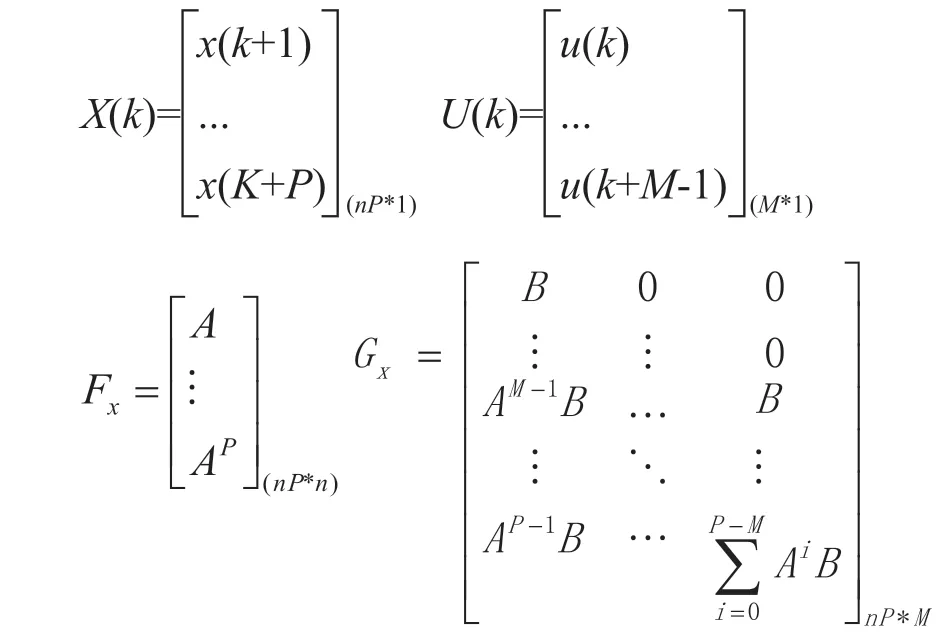
本研究被控系統的數學模型為公式(14),則從k時刻開始,系統的輸入為:

則根據公式可以推測出系統狀態變量值[12-13]預測為:
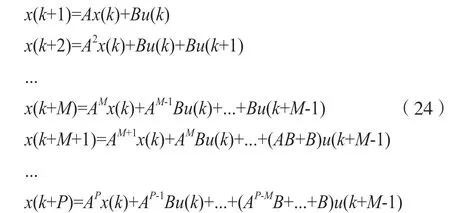
用狀態方程形式描述為:

其中:P為預測步長,M為控制步長,通常P≥M。
在使用模型預測控制算法解決問題時會有一個優化目標,該優化目標與預測模型息息相關,通過對優化目標的最小化進行求解,就會得到最優的控制變量序列[14-15]。離散時間線性約束的系統優化函數目標可表示為公式(26):

公式(26)中,Q和R矩陣用來平衡測量變量與輸入變量的權重,最優序列的表達式為:

則實時控制變量為:

其中:

根據上述方法求得u(k),然后將u(k)作為實際控制變量作用于系統對其進行控制,隨著時間推移,不斷預測、滾動優化和控制。
3 仿真結果與分析
在MATLAB平臺下對上文中的無人機自主著陸方法進行驗證。仿真中使用的加權矩陣Q和R在公式(30)和(31)中給出,限制狀態的約束在公式(31)中給出,并且限制輸入的約束在公式(32)中給出。
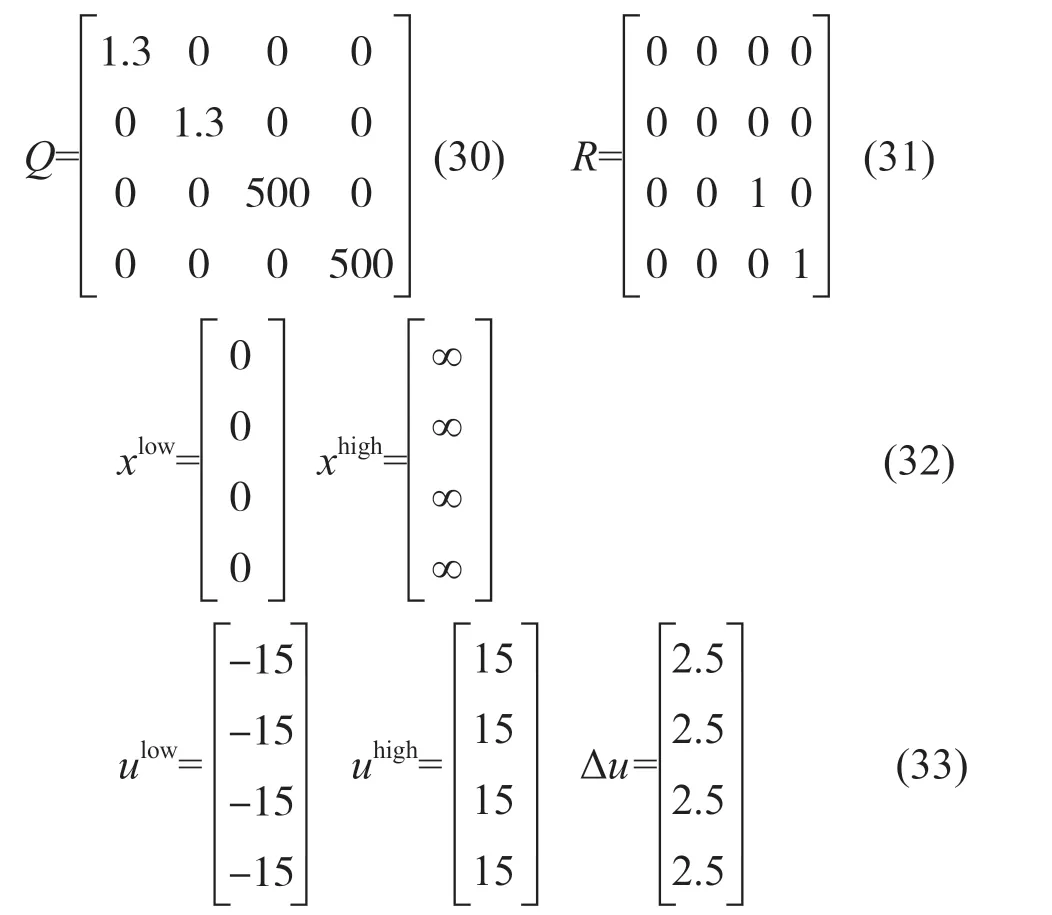
公式(32)中在飛行區域對飛行高度沒有限制;公式(33)中的控制約束將無人機速度限制為±15 m/s,無人機加速度限制為±2.5 m/s2。
3.1 MPC算法不同預測步長仿真結果
圖5說明了模型預測控制算法對無人機進行控制過程中,選擇不同預測步長時無人機的控制效果。圖5(b)顯示了仿真過程中無人機和移動平臺各自的速度。從圖中可以看出,當P=30時無人機自主著陸效果最佳。
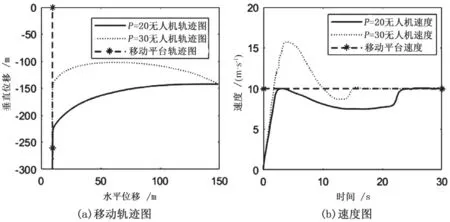
圖5 移動平臺恒速時具有不同預測長度的無人機自主著陸軌跡圖
3.2 移動平臺加速運行
在此仿真任務中,移動平臺以1 m/s2的加速度從0加速到10 m/s,然后以恒定速度繼續行駛。圖6(a)顯示當預測步長P=30時,無人機和移動平臺的行駛路徑;圖6(b)表示無人機和移動平臺各自行駛速度。可看出,在移動平臺勻加速運動狀態下,無人機自主著陸性能表現良好。
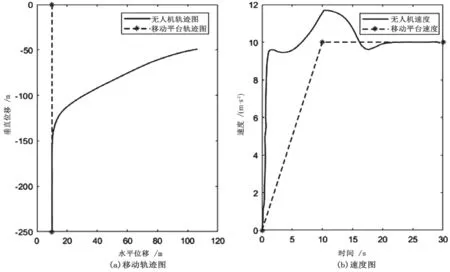
圖6 移動平臺勻加速運動下無人機自主著陸軌跡
3.3 移動平臺隨機路徑行駛
在圖7所示的仿真任務中,移動平臺在速度保持恒定的同時,將隨機噪聲添加于移動平臺轉向角φ上,以控制移動平臺以不規則路徑勻速行駛。圖7(a)與圖7(c)表示無人機和移動平臺的行駛軌跡;圖7(b)表示圖7(a)中所示的隨機驅動速度;圖7(d)表示圖7(c)中來自隨機驅動的速度。可看出,移動平臺在隨機路徑行駛的狀態下,無人機自主著陸性能表現良好。
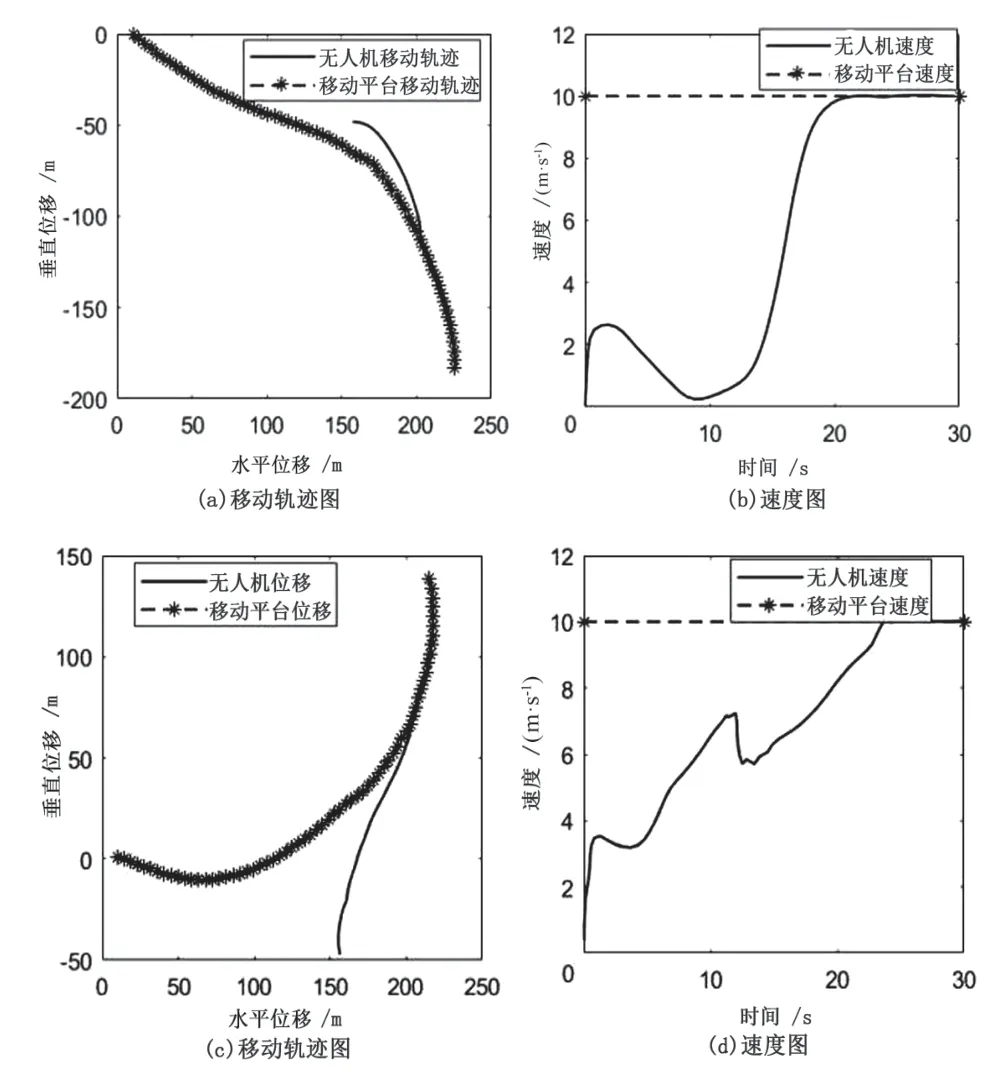
圖7 移動平臺不規則行駛路徑下無人機自主著陸軌跡
4 結論
本文提出一種無人機自主降落于變速運動平臺的控制方法。通過加入卡爾曼濾波器提升無人機與移動平臺相對位置矢量和速度矢量參數精度,并選用模型預測控制(MPC)算法對無人機在降落過程中進行控制。通過MATLAB仿真證明,在移動平臺做變速運動的情況下,該方法可有效實現無人機降落于移動平臺上。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
