埋地管道磁記憶檢測機器人機械結構設計與運動學仿真*
2022-11-29 09:09:34楊健平邢海燕王松弘澤
焊管 2022年11期
楊健平, 邢海燕, 弋 鳴, 賀 琳, 張 釙, 李 泰, 王松弘澤
(東北石油大學 機械科學與工程學院, 黑龍江 大慶 163318)
0 前 言
管道運輸以其輸量大、 密閉性好等優勢成為石油、 天然氣首選的運輸方式[1]。 隨著管道服役年限的延長, 管道常常出現缺陷、 泄露、 腐蝕失效等問題, 燃氣爆炸等災害事故隨時可能發生,因此對管道進行定期檢測十分必要[2]。 目前油氣管道主要采用的無損檢測技術有超聲、 漏磁、 渦流以及磁記憶檢測技術。 超聲檢測技術具有較高的精度, 但由于受超聲波的限制, 對管道壁厚以及管道內傳播介質的要求較高[3]; 漏磁檢測技術主要應用于各種管道網絡腐蝕缺陷的檢測, 但容易因周向磁化不均勻而造成檢測困難[4]; 渦流檢測技術對管道內壁的缺陷有很高的檢測靈敏度,但無法檢測深層的內部缺陷[5]。 與超聲、 漏磁、渦流檢測技術相比, 磁記憶檢測技術不僅能夠檢測出已經產生的宏觀缺陷, 且可以準確檢測出管道早期應力集中, 可為油氣管道失效及全壽命評估提供有力的技術支持, 因而在埋地管道的檢測上具有獨特的優勢[6]。
管道的檢測方式主要為外檢和內檢[7], 外檢無法滿足管道內的精細檢測, 且對埋地管道在役檢測比較困難[8]。 機器人的出現對管道內檢起到了極大的促進作用。 王智鋒等[9]設計的Unified Snake Robot 蛇形機器人具有高度靈活性和極強的爬坡能力; 鄒樹梁等[10]設計的雙履帶式機器人具有較強的越障能力; 肖程等[11]設計的柔性管道清理機器人在徑向具有一定的柔性與良好的變徑性能; 張學文等[12]設計的三腿式管道機器人能夠改變輪腿與機器人主架之間的角度, 輕松適應不同管徑管道; 費振佳等[13]改進了傳統履帶, 設計的管道機器人具有自適應變徑能力, 確保履帶與管道內壁緊密接觸; ALIREZA 等[14]設計的管道機器人KANTARO 的機械功能模塊與控制系統分開設計, 實現了模塊化的思想; DONG 等[15]設計的流體式管道機器人搭載PIG 檢測設備,容易受到結蠟、 凹凸等工況的干擾, 導致檢測結果不完整。 因此, 內檢雖然能實現管道內部的精確檢測, 但由于地形環境、 敷設情況等條件限制, 管道檢測成本高且存在容易卡堵的問題。
本研究針對當前埋地管道檢測機器人只能檢測宏觀缺陷, 無法檢測管道早期應力損傷, 同時在面對結蠟、 凹凸等復雜工況下變徑范圍小、 通過性差、 極易卡堵等問題, 設計出一種搭載金屬磁記憶探頭的分體式可變徑管道檢測機器人, 對其在彎曲、 變徑管道內的通過性進行了仿真分析, 制造物理實體模型并進行試驗驗證。
1 機器人機械結構設計
管道內常見的彎曲與變徑工況, 不僅限制機器人功能模塊的長度, 且容易導致其卡堵, 因此機器人整體結構采取分體式設計, 由導向檢測系統與可拆卸動力系統兩部分組成, 如圖1 所示。由第三足和輔助輪構成的可調式導向機構, 與由絲杠、 螺母副、 磁記憶探頭構成的磁記憶檢測機構共同組成導向檢測系統; 由連桿、 滑槽、 腕式關節構成的履帶驅動機構, 與微型直流電機組成可拆卸動力系統; 導向檢測系統與可拆卸動力系統通過萬向節連接。

圖1 機器人機械結構示意圖
1.1 可調式導向機構
管道內部環境復雜多變, 為保證機器人在工作過程中的穩定性, 可調式導向機構設計為三足形式, 由可調式第三足與下部的兩個輔助輪構成, 其結構如圖2 所示。 機器人在管道內運行過程中, 可調式第三足壓緊管道內壁, 增大機體與管道內壁的摩擦力, 避免機器人在油氣管道中由于管壁光滑導致打滑、 側翻等問題。 該設計不僅可以減少外部激勵引起的震動, 還可以通過第三足與輔助輪形成的三角形結構增加穩定性。
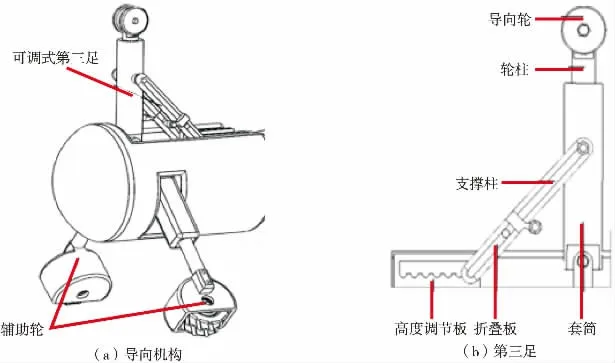
圖2 可調式導向機構示意圖
1.2 可變角度式履帶驅動機構
考慮到工程實際中, 油氣管道存在變徑工況,設計出可變角度式履帶驅動機構, 如圖3 所示。 通過連桿與滑槽的配合實現履帶角度的一級調節, 使履帶與管道內壁形成面接觸, 如圖4 (a) 所示。 為進一步使履帶貼合管道內壁, 增加履帶與管道內壁的接觸面積, 設計一種腕式關節, 實現履帶角度的二級調節(圖4 (b))。
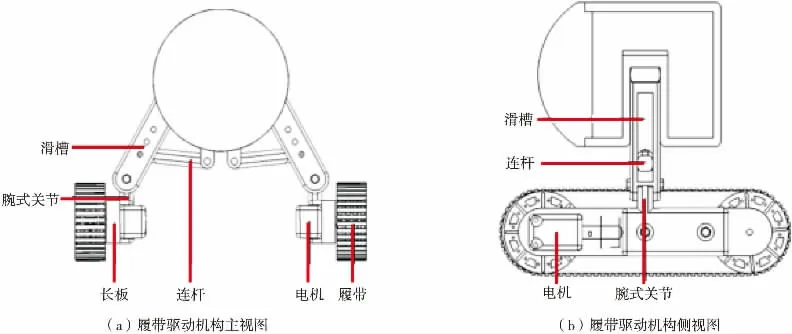
圖3 履帶驅動機構示意圖
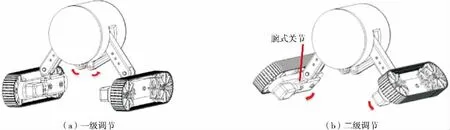
圖4 履帶驅動機構角度改變示意圖
1.3 可變徑磁記憶檢測機構
管道變徑工況會對檢測造成干擾, 導致檢測數據產生誤差。 為應對這一問題, 設計可變徑磁記憶檢測機構, 如圖5 所示。 當機器人在大管徑工況中工作時, 伸縮桿完全張開; 當機器人在小管徑工況時, 伸縮桿收縮, 保證機器人在管道變徑工況下的檢測精度。 當機器人處于非工作狀態時, 伸縮桿收縮到最低位置, 既方便攜帶又能夠保護磁記憶探頭不受破壞。 管道機器人共有6 組檢測單元, 每個單元上搭載一個磁記憶檢測探頭與傳感器探頭, 增大機器人檢測區域, 減小漏檢幾率。

圖5 磁記憶檢測機構變徑示意圖
2 虛擬樣機仿真分析及驗證
將SolidWorks 軟件中建立的三維模型適當簡化, 導入ADAMS 軟件中, 機器人虛擬樣機模型如圖6 所示。 根據管道機器人的運動特性, 利用固定副、 移動副、 轉動副等連接為各零部件添加約束, 在建立好的運動副上增加移動驅動、 轉動驅動等驅動力矩。 在ADAMS 軟件中, 萬向節約束被添加于前半部分與后半部分中間。 為保證管道機器人在仿真過程中完全按照預定軌跡運動,在機器人與管道內壁之間增加接觸, 最后為整體施加重力。
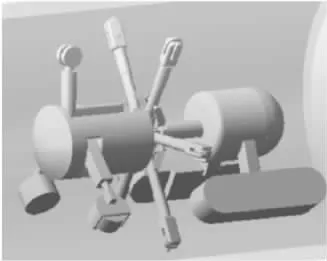
圖6 機器人虛擬樣機模型
2.1 彎管通過性仿真結果分析
在管徑為320 mm、 曲率半徑為1.5 倍管徑的90°彎管中進行仿真試驗。 管道機器人在彎管中的運動學仿真結果如圖7 所示。

圖7 彎管通過性仿真結果
仿真模擬了管道機器人在4 s 內的運動過程,機器人較為平穩地通過90°彎管。 ADAMS 計算的機器人履帶驅動輪速度曲線如圖8 所示。 由圖8可知, 由于彎管各輪位移不同, 彎管外側驅動輪速度基本不變, 內側驅動輪速度減小0.23 m/s, 出彎管后內側驅動輪速度恢復正常, 曲線描述的運動過程與實際相符。 仿真結果表明, 機器人能夠順利通過曲率半徑不小于1.5 倍管徑的彎曲管道。

圖8 機器人履帶驅動輪速度變化曲線圖
2.2 變徑管道通過性仿真結果分析
在280~340 mm 變徑管道中進行仿真試驗, 管道機器人在變徑管道中的運動學仿真結果如圖9 所示。
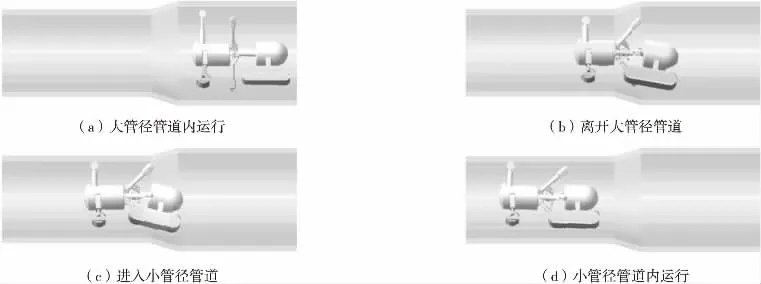
圖9 變徑管道通過性仿真結果
仿真模擬了機器人在變徑工況下的變徑過程。用ADAMS 計算機器人在變徑過程中磁記憶檢測機構的張開半徑, 半徑變化曲線如圖10 所示。
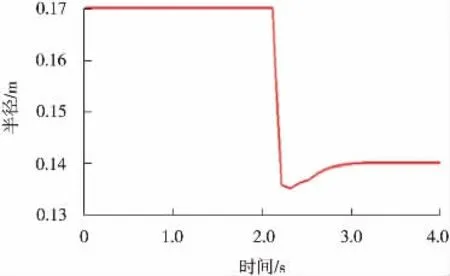
圖10 檢測機構張開半徑變化曲線
由圖10 可知, 當管徑變小時, 機器人通過調節磁記憶檢測機構的張開半徑來適應變徑工況。 在完全進入管徑280 mm 管道后, 曲線趨于平衡, 機器人順利通過變徑管道。 用ADAMS 計算機器人在通過彎管工況時的整體速度, 速度變化曲線如圖11 所示。

圖11 機器人速度變化曲線
仿真結果表明, 機器人能夠通過280~340 mm變徑管道, 驗證了機器人變徑機構設計的可行性。
3 實體模型試驗
通過激光切割加工非標零部件, 裝配機器人各部件。 對機器人各執行機構進行布線, 完成機器人物理實體模型的組裝。 對機器人實體模型進行的主要測試: ①機器人能否轉彎; ②機器人能否變徑; ③機器人對管道內缺陷的檢測情況。
3.1 轉彎測試
圖12 為機器人左右方向的轉彎過程測試記錄, 由圖12 可知, 機器人能夠順利轉彎。

圖12 機器人轉彎過程
3.2 變徑管道測試
圖13 為管道機器人在不同管徑工況下的工作狀態。 機器人在大管徑中工作時, 檢測機構與導向輪完全張開, 如圖13 (a) 所示; 在小管徑中工作時, 檢測機構與導向輪完全收縮, 如圖13 (b)所示, 機器人能夠順利變徑管道。

圖13 機器人在不同管徑工況中工作狀態
將機器人放入內徑330 mm 的水平長直管道中進行試驗。 機器人在直管道中的運行情況如圖14所示, 機器人行進平穩, 且能以較快的速度前進。共進行了5 次水平行進5 000 mm 試驗, 所需時間分別為14.7 s、 14.8 s、 14.7 s、 14.7 s 和14.8 s, 平均時間14.7 s, 機器人運行平均速度為340 mm/s。

圖14 機器人模型在直管道中運行
3.3 管道內缺陷磁記憶檢測
當鐵磁性構件處于地磁場環境當中且受載荷作用時, 在應力集中區域或缺陷處會產生自有漏磁場, 此時磁敏探頭可以準確探測到鐵磁構件表面的漏磁場分布, 并通過對磁場強度的切向分量和法向分量特征信號進行分析, 從而準確得到應力集中的位置。 管道機器人搭載的磁記憶傳感器是HMC1001 型磁敏電阻, 其利用磁阻效應將磁信號轉換成電信號, 即當外界存在磁場變化時,電阻值發生變化, 導致輸出電壓發生變化, 從而測得磁場變化。 HMC1001 型磁敏電阻的靈敏度為3.2 mV/V/高斯, 分辨率為27 微高斯, 1 微高斯等于0.8×10-4A/m, 可滿足測試要求。
在運行過程中, 管道機器人通過可變角度式履帶驅動機構與可變徑磁記憶檢測機構的調節, 使磁記憶檢測探頭緊貼管道內壁并沿管道軸向進行檢測, 得到的磁記憶信號曲線如圖15所示。

圖15 管道缺陷磁記憶信號曲線
由圖15 可以看出, 磁場強度切向信號在缺陷附近位置10~15 mm 處達到波谷, 峰峰值約為60.69 A/m, 磁場梯度為9.147 A/m/mm,梯度極限狀態系數6.168。 磁場強度法向信號在缺陷附近位置10~15 mm 處出現較大跳變, 峰峰值約為82.89 A/m, 磁場梯度為5.508 A/m/mm,梯度極限狀態系數為4.083。 利用X 射線檢測對此處進行復驗, 結果如圖16 所示, 存在著嚴重的焊接裂紋, 驗證了磁記憶檢測結果的正確性。
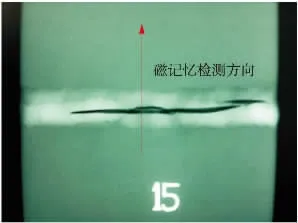
圖16 X 射線檢測結果
對比分析X 射線檢測與磁記憶檢測結果可知, X 射線檢測技術采用光感膠片成像, 雖然能夠直觀顯示缺陷的影像, 但是檢測步驟繁瑣, 速度慢, 效率低, 且射線對人體有害; 磁記憶檢測技術不需要進行額外的操作, 不僅可以檢測出已經產生的宏觀缺陷并清晰展示缺陷位置, 還能夠準確地檢測出管道早期應力集中, 對埋地管道的檢測具有獨特的優勢, 但是同樣存在成像不直觀, 無法直接看到缺陷大小等缺點, 這是接下來要進行研究的另一個方向。
4 結 論
(1) 針對埋地管道內檢測機器人在轉彎、 變徑、 結蠟等復雜工況下通過性差、 極易卡堵等問題, 設計了一種分體式可變徑自適應磁記憶檢測機器人。
(2) 利用三維建模與仿真, 對機器人在彎曲與變徑工況下的通過性進行了仿真分析, 仿真結果表明, 能夠順利通過曲率半徑不小于1.5 倍管徑的彎管與280~340 mm 的變徑管道, 證實了機器人結構設計的可行性。
(3) 制作實體樣機并進行驗證試驗, 試驗結果表明, 機器人行進平穩, 且能以穩定的速度前進。 磁記憶檢測試驗結果與X 射線檢測結果一致, 為可變徑、 自適應、 全壽命埋地管道檢測機器人的進一步研究提供了新的思路。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
作文周刊·小學一年級版(2016年27期)2017-06-03 23:21:17
海峽科技與產業(2016年3期)2016-05-17 04:32:12
新湘評論·下半月(2016年4期)2016-05-05 22:12:41
新湘評論·下半月(2016年4期)2016-05-05 22:12:41
