基于多傳感器融合的無人機(jī)應(yīng)急著陸功能研究
2022-11-28 11:19:32張炯牛歡陳雪
航空科學(xué)技術(shù) 2022年11期
張炯,牛歡,陳雪
中國商用飛機(jī)有限責(zé)任公司北京民用飛機(jī)技術(shù)研究中心 中國商飛人工智能創(chuàng)新中心,北京 102209
近年來,無人機(jī)作為一種新型飛行器,在城市空中交通領(lǐng)域得到了飛速的突破和發(fā)展。其中,電動(dòng)垂直起降(eVTOL)無人機(jī)因具有低碳環(huán)保、運(yùn)行成本低等優(yōu)勢成為當(dāng)下研究的熱點(diǎn)。空客公司硅谷創(chuàng)新中心于2016 年年初啟動(dòng)Vahana 項(xiàng)目,并于2018 年年初實(shí)現(xiàn)首飛;波音公司于2017 年11 月收購了美國Aurira Flight Sciences 公司研發(fā)的自主載人飛行器(PAV),并于2019年1月實(shí)現(xiàn)首飛[1-3];億航的ES216-S型無人駕駛航空器系統(tǒng)于2022年2月9日取得了中國民航局頒發(fā)的專用條件,成為全球首款獲得監(jiān)管機(jī)構(gòu)型號合格批準(zhǔn)的無人駕駛航空器[4]。
隨著城市空中交通領(lǐng)域內(nèi)無人機(jī)的大量涌入,無人機(jī)的運(yùn)行管理成了亟待解決的問題,尤其是對城市空域內(nèi)無人機(jī)運(yùn)行的安全性提出了更高的要求。為滿足不斷增長的無人機(jī)運(yùn)營需求,在美國聯(lián)邦航空局(FAA)的牽引下,美國國家航空航天局(NASA)設(shè)計(jì)了一套無人機(jī)空中管理系統(tǒng)(UTM),通過地面以及空中一系列服務(wù)設(shè)施和工具來安全、經(jīng)濟(jì)、高效地管理各個(gè)無人機(jī)系統(tǒng),保障某一空域內(nèi)大規(guī)模無人機(jī)運(yùn)行安全[5]。
為滿足無人機(jī)飛行任務(wù)中安全性、自主性方面的需求,自主著陸(包含非應(yīng)急狀態(tài)下的自主著陸和應(yīng)急狀態(tài)下的自主著陸)逐漸成為無人機(jī)設(shè)計(jì)研發(fā)過程中需要考慮的基礎(chǔ)功能。自主著陸功能的核心是對可著陸區(qū)域的識(shí)別定位,當(dāng)前識(shí)別定位可著陸區(qū)域的方法主要包括:(1)有地面標(biāo)識(shí)可著陸區(qū)域識(shí)別定位方法;(2)無地面標(biāo)識(shí)可著陸區(qū)域識(shí)別定位方法。有地面標(biāo)識(shí)可著陸區(qū)域識(shí)別定位方法針對預(yù)設(shè)著陸地標(biāo)的目標(biāo)區(qū)域進(jìn)行檢測,識(shí)別可著陸區(qū)域,常見的有基于無線電和激光引導(dǎo)的自主著陸方法、基于二維碼定位的自主著陸方法等[6],以上方法,需要預(yù)先設(shè)置地面標(biāo)識(shí),以及提前設(shè)定目標(biāo)點(diǎn),其不足之處在于:無法在未知環(huán)境下對目標(biāo)區(qū)域進(jìn)行識(shí)別,并完成對無人機(jī)自主著陸的引導(dǎo)。
無地面標(biāo)識(shí)可著陸區(qū)域識(shí)別定位主要利用無人機(jī)搭載傳感器進(jìn)行主動(dòng)識(shí)別定位,常見的有:(1)搭載激光雷達(dá)獲取地面點(diǎn)云數(shù)據(jù)識(shí)別可著陸區(qū)域。激光點(diǎn)云識(shí)別技術(shù)雖能獲取地面不平度信息,但缺乏對地面物體類別的判斷,而且受點(diǎn)云分辨率和激光探測精確度及探測范圍影響,不能應(yīng)用于高空飛行場景。(2)搭載攝像頭獲取地面圖像[7-9],基于圖像分割識(shí)別可著陸區(qū)域。圖像分割技術(shù)基于單一圖像信息進(jìn)行分割操作,缺少或忽略了地面的三維信息,尋找目標(biāo)區(qū)域的安全性和魯棒性不足。(3)基于多傳感器融合協(xié)同技術(shù)[10-15],處理同一時(shí)段內(nèi)的、不同類型傳感器采集的信息,基于特定的特征信息進(jìn)行不同傳感器之間的匹配,豐富對所處環(huán)境的感知內(nèi)容,識(shí)別可著陸區(qū)域。如視覺和激光雷達(dá)融合、視覺和毫米波雷達(dá)融合、定位信息與外置傳感器信息融合等,不僅可以增強(qiáng)無人機(jī)的感知能力,還可以提高其在執(zhí)行任務(wù)過程中的安全性和魯棒性。以上可著陸區(qū)域識(shí)別方法僅針對某一高度空域,不能同時(shí)應(yīng)對高空、中高空、低空不同高度飛行場景,缺乏應(yīng)用的普遍性。如激光雷達(dá)點(diǎn)云在高空場景探測效果較差,相機(jī)圖像在低空檢測范圍較小,視覺與激光雷達(dá)融合僅支持中高空與低空場景下的識(shí)別,缺少針對高空、中高空、低空全飛行高度階段的可著陸區(qū)域識(shí)別篩選方法。
本文基于無人機(jī)下視相機(jī)和雷達(dá)傳感器數(shù)據(jù)及其融合算法,根據(jù)不同飛行高度采取不同可著陸區(qū)域識(shí)別篩選策略,獲得城市未知場景下可著陸區(qū)域位置,在無人機(jī)通信鏈路丟失、電量不足以抵達(dá)備降點(diǎn)等緊急情況下,實(shí)現(xiàn)自主控制無人機(jī)應(yīng)急著陸。該無人機(jī)應(yīng)急著陸方法有效提高了無人機(jī)環(huán)境感知能力,可應(yīng)用于不同飛行高度空域,增強(qiáng)了無人機(jī)城市空中交通運(yùn)行的安全性。
1 應(yīng)急著陸功能應(yīng)用需求
一般來講,為了保證無人機(jī)在運(yùn)行過程中的安全性,通常會(huì)選擇良好天氣進(jìn)行飛行,同時(shí)在規(guī)劃航線時(shí),會(huì)避開人群密集區(qū)域以減少安全性風(fēng)險(xiǎn),不僅如此,部分航線飛行過程中要求附近設(shè)置多個(gè)備降點(diǎn)保證整個(gè)飛行過程安全。然而針對城市空中交通運(yùn)行場景下,無人機(jī)在通信鏈路丟失、電量不足無法到達(dá)備降點(diǎn)等安全預(yù)警情況下的安全著陸需求,應(yīng)設(shè)計(jì)其應(yīng)急著陸功能,使其在當(dāng)前未知環(huán)境下識(shí)別判斷可著陸區(qū)域,實(shí)現(xiàn)安全著陸,進(jìn)一步增強(qiáng)飛機(jī)運(yùn)行的可靠性和安全性。
基于UTM系統(tǒng)對無人機(jī)運(yùn)行安全性方面的考量,依托無人航空器管理體系現(xiàn)狀,應(yīng)急著陸功能的核心需求應(yīng)包括以下兩個(gè)方面。
(1)應(yīng)急著陸功能的覆蓋性
覆蓋無人機(jī)在高空、中高空、低空的全飛行階段,為不同高度空域下的未知環(huán)境安全著陸提供合適的解決方案。同時(shí)可應(yīng)對無人航空器通信鏈路丟失、電量不足無法到達(dá)備降點(diǎn)、突發(fā)惡劣天氣等緊急情況。
(2)應(yīng)急著陸功能的安全性
能夠以較高準(zhǔn)確度識(shí)別判斷未知環(huán)境地面物體類別和地面條件,在對公共安全不產(chǎn)生影響、著陸后不損害無人航空器機(jī)體,以及不違背現(xiàn)有法律法規(guī)的情況下,實(shí)現(xiàn)應(yīng)急著陸。
無人機(jī)的應(yīng)急著陸功能通過加裝機(jī)載傳感器的方式,增強(qiáng)自身外部環(huán)境感知能力,利用人工智能手段對運(yùn)行場景進(jìn)行多維分析,當(dāng)出現(xiàn)緊急情況時(shí)應(yīng)急著陸功能可以快速響應(yīng),及時(shí)探測地面可著陸區(qū)域,引導(dǎo)無人機(jī)完成緊急情況下的著陸操作。
2 無人機(jī)應(yīng)急著陸階段場景劃分
無人機(jī)加裝下視相機(jī)和下視激光雷達(dá)對外界環(huán)境進(jìn)行主動(dòng)感知,在執(zhí)行航線任務(wù)時(shí),不同的飛行高度會(huì)決定周圍的態(tài)勢環(huán)境,同時(shí)也會(huì)影響實(shí)際加裝傳感器的探測性能。因此,根據(jù)無人機(jī)響應(yīng)應(yīng)急著陸功能的在飛高度以及現(xiàn)有傳感器的探測距離及精度等因素,通常需要對飛行高度進(jìn)行剖面分析,可分為高空場景、中高空場景和低空場景三種情況。在高空場景中,因激光雷達(dá)探測范圍有限,主要任務(wù)由視覺與慣性測量單元(IMU)融合完成,中高空和低空場景中進(jìn)一步融合激光雷達(dá)點(diǎn)云信息,增加地面三維點(diǎn)云信息融合處理可提高整體應(yīng)急著陸任務(wù)的安全性和可靠性。
(1)高空場景
無人機(jī)飛行高度較高,超過現(xiàn)有下視激光雷達(dá)實(shí)際最大探測距離,因此基本沒有點(diǎn)云信息可供參考。下視相機(jī)可以滿足對地面場景的觀測,但受限于高空場景且下視相機(jī)捕獲圖像分辨率,地面不同區(qū)域在圖像中所占像素區(qū)域較小,虛擬仿真場景示意如圖1所示。

圖1 高空場景下仿真環(huán)境圖示Fig.1 Diagram of simulation environment in high altitude scene
(2)中高空場景
無人機(jī)飛行高度適中,下視相機(jī)觀測到的地面區(qū)域分割明顯,下視激光雷達(dá)可探測到足夠點(diǎn)云數(shù)量,當(dāng)將激光雷達(dá)點(diǎn)云投影到圖像上時(shí),可以通過圖像像素對激光雷達(dá)進(jìn)行匹配,實(shí)現(xiàn)圖像區(qū)域到點(diǎn)云系統(tǒng)的映射功能,同時(shí)激光雷達(dá)點(diǎn)云信息能夠滿足對地面不平度進(jìn)行初步估計(jì)要求,虛擬仿真場景如圖2所示。

圖2 中高空場景仿真環(huán)境圖示Fig.2 Diagram of simulation environment in mid high altitude scene
(3)低空場景
無人機(jī)飛行高度較低,下視相機(jī)觀測到的地面區(qū)域相較中高空場景區(qū)塊更小,便于觀測地面動(dòng)態(tài)和小像素目標(biāo)障礙物,對于躲避著陸區(qū)域內(nèi)的障礙物有較好作用,而且下視激光雷達(dá)可探測到的地面點(diǎn)云數(shù)量更加細(xì)致,便于通過點(diǎn)云擬合的方式對地面場景進(jìn)行三維重建,實(shí)現(xiàn)指引無人機(jī)著陸未知環(huán)境的功能,虛擬仿真場景如圖3所示。
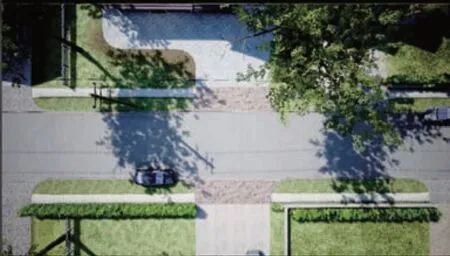
圖3 低空場景仿真環(huán)境圖示Fig.3 Diagram of simulation environment in low altitude scene
以上所述的高空場景、中高空場景和低空場景主要由機(jī)載傳感器工作性能進(jìn)行區(qū)分,對于一般的激光雷達(dá)傳感器來講,探測到的點(diǎn)云數(shù)量與傳感器的可信度成正比,當(dāng)飛機(jī)高度越高時(shí),下視相機(jī)捕獲地面圖像的細(xì)節(jié)缺失也會(huì)越嚴(yán)重,因此根據(jù)以上依據(jù)對飛機(jī)飛行剖面高度進(jìn)行劃分,見表1,以便針對不同飛行高度場景采取不同的傳感器融合探測方案。
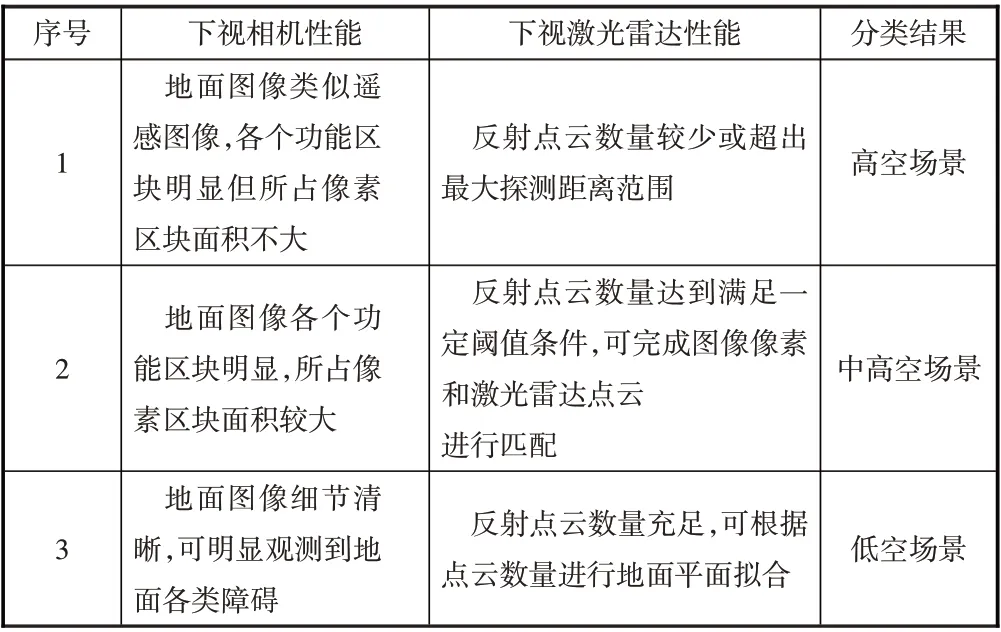
表1 飛行器飛行高度剖面劃分Table 1 Aircraft flight altitude profile division
應(yīng)急著陸功能根據(jù)不同的觸發(fā)場景,將會(huì)采用不同的感知方法,具體的功能邏輯見表2。同時(shí)根據(jù)不同的著陸區(qū)域檢測結(jié)果,三種場景可建立切換聯(lián)系,功能處理邏輯如圖4所示。
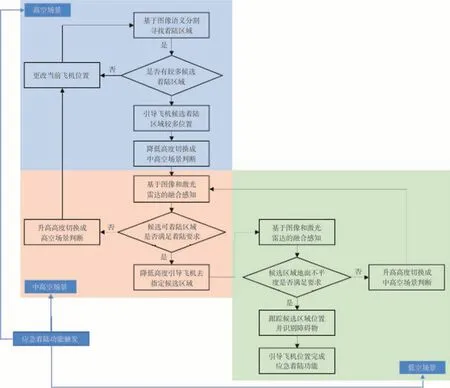
圖4 不同場景應(yīng)急著陸功能處理邏輯圖Fig.4 Logic diagram of emergency landing function processing in different scenarios
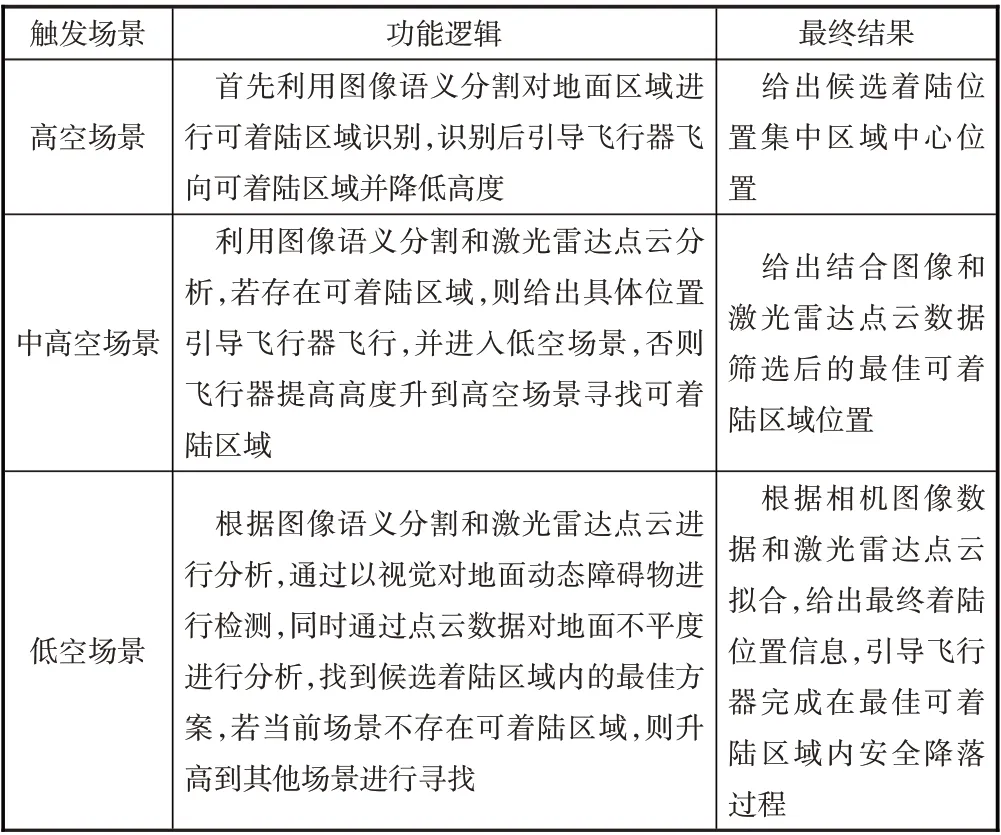
表2 不同場景應(yīng)急著陸功能觸發(fā)邏輯Table 2 Triggering logic of emergency landing function in different scenarios
3 應(yīng)急著陸功能實(shí)現(xiàn)方法
根據(jù)飛行器觸發(fā)應(yīng)急著陸功能時(shí)所在的高度場景不同,有以下三種處理過程。
(1)高空場景下的應(yīng)急著陸處理過程
受限于高空場景下的傳感器性能,在該場景下激光雷達(dá)傳感器無法探測到地面的點(diǎn)云信息,因此當(dāng)應(yīng)急著陸功能被觸發(fā)響應(yīng)時(shí),飛機(jī)的首要任務(wù)是根據(jù)當(dāng)前的地面場景找到更多的候選可著陸區(qū)域。下視相機(jī)和飛機(jī)本身的位置、姿態(tài)等傳感器的信息融合,可以給飛行器提供后續(xù)的位置引導(dǎo)。當(dāng)找到較多合適的候選著陸區(qū)域之后再下降高度進(jìn)入中高空場景進(jìn)行判斷。
一般來講,根據(jù)無人機(jī)的著陸地點(diǎn)安全性要求,認(rèn)為農(nóng)田區(qū)域、草坪區(qū)域和道路等鋪砌路面區(qū)域作為可著陸區(qū)域優(yōu)先考慮區(qū)域,通過圖像語義分割可將該類候選可著陸區(qū)域分割出來,根據(jù)可著陸區(qū)域在當(dāng)前圖像上的位置引導(dǎo)飛機(jī)進(jìn)入候選可著陸區(qū)域內(nèi)并且降低高度,便于添加激光雷達(dá)點(diǎn)云信息進(jìn)一步融合處理,尋找更佳的著陸區(qū)域,處理過程如圖5 所示。在該場景下的圖像分割處理后,通過可著陸區(qū)域合并,依據(jù)式(1)建立可著陸區(qū)域二值化圖像,之后計(jì)算每個(gè)多邊形區(qū)域內(nèi)的像素面積,判斷當(dāng)前視角下的可著陸區(qū)域是否滿足飛機(jī)著陸要求。
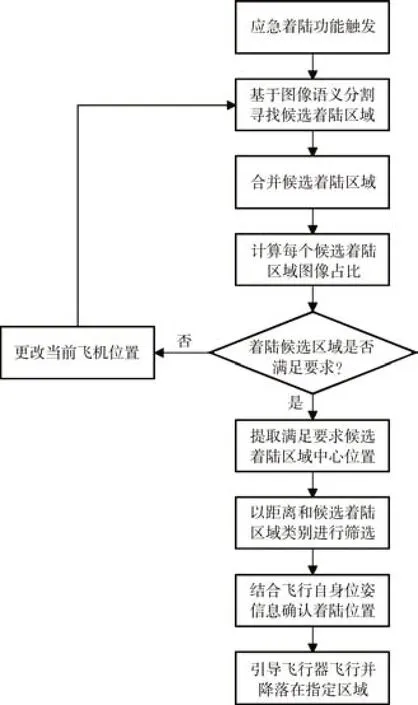
圖5 高空場景下應(yīng)急處理過程Fig.5 Emergency treatment process in high altitude scene

式中,f(u,v)計(jì)算結(jié)果表示在圖像坐標(biāo)系下(u,v)點(diǎn)的二值化的數(shù)值。
(2)中高空場景下的應(yīng)急著陸處理過程
在中高空場景中,下視相機(jī)對地面的觀測能力提升,便于識(shí)別圖像中像素占比較小的元素,同時(shí)對于下視激光雷達(dá)來講,由于該場景中激光雷達(dá)對地面探測的點(diǎn)云數(shù)量也達(dá)到要求,因此可以通過激光雷達(dá)點(diǎn)云和圖像融合的方式對地面環(huán)境進(jìn)行感知,同時(shí)根據(jù)飛行器自身的IMU設(shè)備校正傳感器感知的實(shí)際位置。該場景應(yīng)急著陸功能的處理過程如圖6所示。
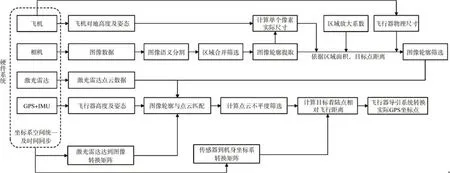
圖6 中高空場景下應(yīng)急處理過程Fig.6 Emergency treatment process in mid high altitude scene
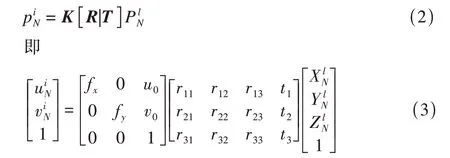
首先通過下視相機(jī)獲取的圖像數(shù)據(jù)進(jìn)行語義分割識(shí)別,將同風(fēng)險(xiǎn)的可著陸區(qū)域進(jìn)行合并,通過可著陸區(qū)域圖像輪廓提取計(jì)算占地面積,估計(jì)區(qū)域大小是否滿足飛行器尺寸要求,通過式(2)計(jì)算激光雷達(dá)點(diǎn)云和圖像匹配關(guān)系,確定圖像上滿足著陸地點(diǎn)的像素位置在激光雷達(dá)坐標(biāo)系中的對應(yīng)關(guān)系。
(3)低空場景下的應(yīng)急著陸處理過程
在低空場景下,圖像可以針對地面物體有更清晰的識(shí)別能力,對地面障礙物以及動(dòng)態(tài)的行人車輛有更準(zhǔn)確的識(shí)別特征,同時(shí)激光雷達(dá)反射到地面上的點(diǎn)云數(shù)量和密度能夠更高地?cái)M合出地面的三維物理信息,可更好地用于地形估計(jì)和最佳著陸位置篩選工作。因此在該場景下的應(yīng)急著陸處理過程如圖7所示。

圖7 低空場景下應(yīng)急著陸處理過程Fig.7 Emergency treatment process in low altitude scene
當(dāng)處在較低高度時(shí),無人機(jī)基本已經(jīng)處在可著陸區(qū)域之中,但仍需要通過激光雷達(dá)點(diǎn)云判斷當(dāng)前可著陸區(qū)域的地面不平度信息,根據(jù)飛行器物理尺寸篩選合適的著陸中心點(diǎn)位置,確定著陸位置后發(fā)送給無人機(jī)引導(dǎo)系統(tǒng)用于安全著陸。
4 應(yīng)急著陸功能測試
針對本文研究內(nèi)容,采用仿真平臺(tái)對無人機(jī)應(yīng)急著陸方法進(jìn)行測試,一方面需要模擬高空環(huán)境,另一方面需要更真實(shí)的虛擬仿真環(huán)境,因此采用微軟公司開源平臺(tái)AirSim[16]進(jìn)行測試,AirSim仿真平臺(tái)依托UE4虛幻引擎,具備非常豐富逼真的視覺仿真效果,同時(shí)具有攝像頭、激光雷達(dá)、GPS、IMU 等多種傳感器,能夠模擬無人機(jī)在各種場景下的飛行控制及傳感器數(shù)據(jù)捕獲。利用ROS 平臺(tái)將無人機(jī)飛行狀態(tài)和傳感器探測數(shù)據(jù)發(fā)布到統(tǒng)一平臺(tái),提供給測試模塊進(jìn)行使用,為本文研究內(nèi)容提供了驗(yàn)證平臺(tái)。
4.1 測試場景
本研究選取城市環(huán)境場景的仿真場景對應(yīng)急著陸方案進(jìn)行測試試驗(yàn),該仿真場景地面包括鋪砌路面和草坪等可著陸區(qū)域,房屋建筑、樹林區(qū)域、水域等不可著陸區(qū)域及汽車、電線桿等危險(xiǎn)障礙物,能夠滿足應(yīng)急著陸算法測試需求。基于AirSim的城市環(huán)境場景如圖8 所示。下視相機(jī)捕獲的圖像場景如圖9所示,利用ROS平臺(tái)的RVIZ軟件對測試過程的圖像和點(diǎn)云信息進(jìn)行圖形化顯示,顯示界面如圖10所示。

圖8 虛擬仿真測試場景Fig.8 Virtual simulation test scene

圖9 下視圖像捕獲場景Fig.9 Scene captured by down view image
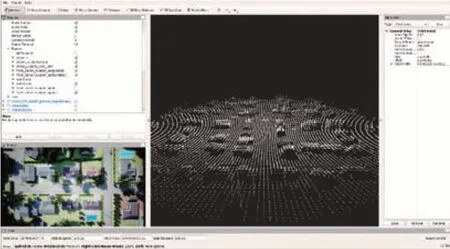
圖10 ROS RVIZ軟件顯示Fig.10 Display by the ROS RVIZ software
4.2 測試過程
本文研究內(nèi)容仿真測試場景采用上述場景,將天氣設(shè)置成默認(rèn)良好情況,設(shè)置無人機(jī)平臺(tái)傳感器時(shí)添加下視相機(jī)、下視激光雷達(dá)以及飛機(jī)自身GPS 和IMU 傳感器,其中針對激光雷達(dá)傳感器約束最大探測范圍,并同時(shí)增大垂直角度探測范圍以更好地利用點(diǎn)云信息,設(shè)置完成后啟動(dòng)虛擬仿真場景。
當(dāng)虛擬環(huán)境完成加載后,選擇合適的航線并通過程序控制飛行器在虛擬環(huán)境中飛行,當(dāng)無人機(jī)飛行高度到達(dá)指定高度時(shí),手動(dòng)觸發(fā)響應(yīng)應(yīng)急著陸功能,進(jìn)行功能測試。設(shè)置仿真激光雷達(dá)對地高度探測最大距離,并根據(jù)實(shí)際真實(shí)雷達(dá)探測距離增加線性可信衰減函數(shù)區(qū)分不同場景激光雷達(dá)傳感器性能,如式(4)所示。
式中,Γ為激光雷達(dá)在當(dāng)前高度信賴度,當(dāng)大于1時(shí)認(rèn)為完全可信;Hmax為雷達(dá)可探測到的最大距離;a為常數(shù),用來調(diào)節(jié)信賴度結(jié)果;H為當(dāng)前飛行器對地高度。
應(yīng)急著陸程序可通過傳感器信息判斷當(dāng)前飛行場景。同時(shí)程序可根據(jù)當(dāng)前相機(jī)和激光雷達(dá)點(diǎn)云數(shù)量確定傳感器數(shù)據(jù)可信度,當(dāng)處于高空場景時(shí),仿真結(jié)果示意如圖11 所示。在該場景下無人機(jī)飛行高度較高,受傳感器自身探測距離因素影響,當(dāng)前激光雷達(dá)點(diǎn)云數(shù)量基本為空,無人機(jī)主要通過圖像語義分割的方式對地面有效的可著陸區(qū)域進(jìn)行識(shí)別,計(jì)算當(dāng)前視角下的可著陸區(qū)域范圍,若滿足設(shè)定閾值,則根據(jù)可著陸區(qū)域計(jì)算無人機(jī)下一階段目標(biāo)點(diǎn),同時(shí)下降高度完成飛行場景的轉(zhuǎn)換。
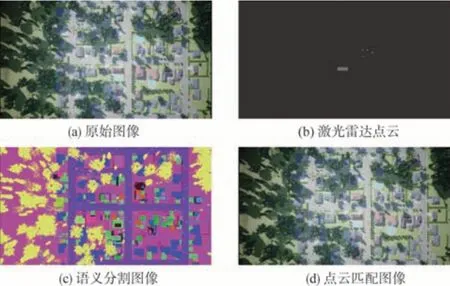
圖11 高空場景仿真結(jié)果示意圖Fig.11 Schematic diagram of high altitude scene simulation results
無人機(jī)下降高度同時(shí)對地面點(diǎn)云數(shù)量進(jìn)行統(tǒng)計(jì),當(dāng)滿足中高場景下的激光雷達(dá)點(diǎn)云數(shù)量要求時(shí),利用圖像分割的方法和激光雷達(dá)點(diǎn)云投影到圖像上的方式,獲取候選可著陸區(qū)域內(nèi)的點(diǎn)云進(jìn)行處理,如圖12所示。此時(shí)的點(diǎn)云數(shù)量可以通過和相機(jī)的轉(zhuǎn)換矩陣進(jìn)行對應(yīng),同時(shí)根據(jù)飛機(jī)設(shè)定的物理尺寸大小,對地面可著陸區(qū)域進(jìn)行篩選,候選可著陸區(qū)域的選擇順序是鋪砌路面優(yōu)于草坪區(qū)域。最終確定符合著陸區(qū)域的位置,并同時(shí)降低高度進(jìn)行以點(diǎn)云處理為主的應(yīng)急著陸區(qū)域篩選。
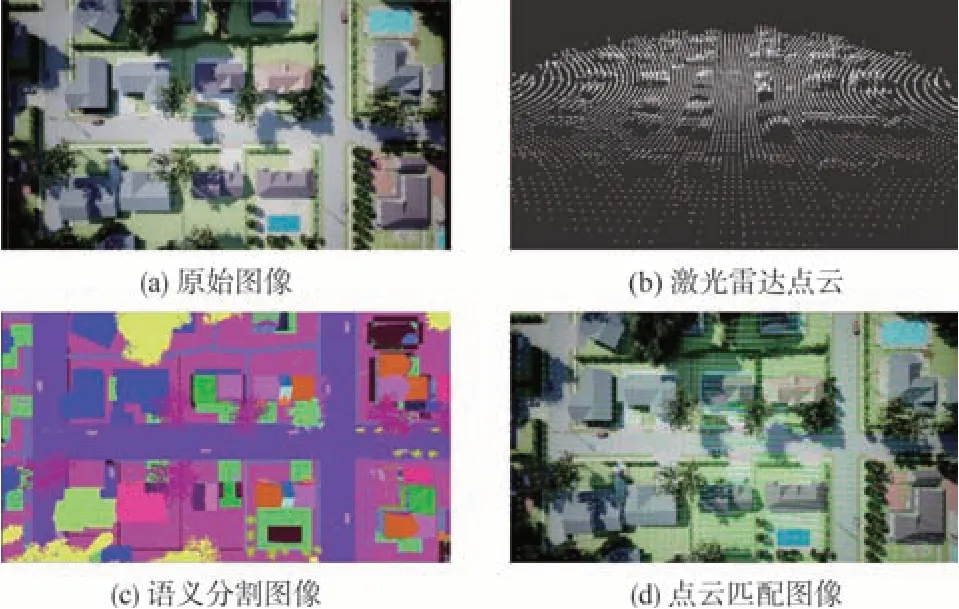
圖12 中高空場景仿真示意圖Fig.12 Schematic diagram of mid high altitude scene simulation results
無人機(jī)根據(jù)之前的識(shí)別過程選擇可用于著陸的位置,此時(shí)傳感器觀測到的信息如圖13 所示。在當(dāng)前飛行器下視相機(jī)的視角下,激光雷達(dá)點(diǎn)云信息比較稠密,因此可以通過點(diǎn)云平面擬合的方式對當(dāng)前預(yù)著陸的地形進(jìn)行重建工作,利用無人機(jī)設(shè)置的著陸空間范圍對點(diǎn)云平面進(jìn)行滑動(dòng)窗口切割計(jì)算,若擬合平面梯度和地面不平度滿足實(shí)際著陸要求,計(jì)算當(dāng)前區(qū)域中心點(diǎn),并通過激光雷達(dá)點(diǎn)云信息找到對應(yīng)中心點(diǎn)的實(shí)際相對飛行器距離,并結(jié)合GPS和IMU的信息對著陸位置進(jìn)行估計(jì),引導(dǎo)飛機(jī)飛向安全區(qū)域。
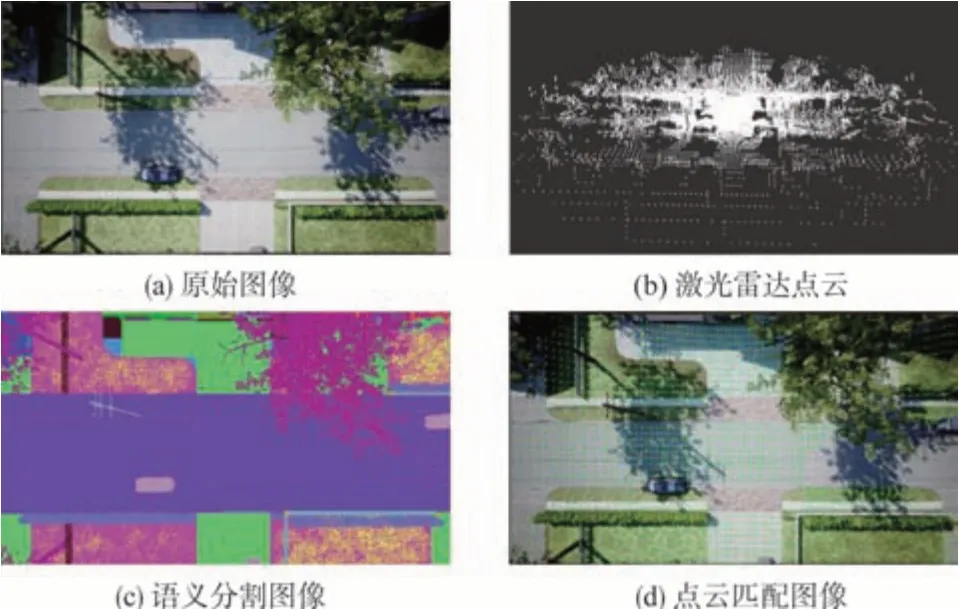
圖13 低空場景仿真示意圖Fig.13 Schematic diagram of low altitude scene simulation results
在實(shí)際測試過程中,圖像語義分割和雷達(dá)點(diǎn)云處理同步進(jìn)行,在高空場景下的測試結(jié)果如圖14 所示,當(dāng)前仿真測試對地高度約為150m,此時(shí)激光雷達(dá)可信賴度較低,小于可接收閾值,其中圖14(e)中點(diǎn)云映射到圖像上的點(diǎn)云顏色隨飛機(jī)高度進(jìn)行變化,靠近地面顏色為紅色,離地面越遠(yuǎn)綠色比重越多。高空場景下輸出的圖像和候選可著陸點(diǎn)的實(shí)際位置數(shù)據(jù)見表3。此時(shí)當(dāng)前飛機(jī)可找到候選著陸位置,因此將候選著陸位置發(fā)送給飛機(jī)引導(dǎo)系統(tǒng),降低高度切換場景實(shí)現(xiàn)更細(xì)致的感知。

表3 高空場景輸出可著陸區(qū)域坐標(biāo)信息(部分)Table 3 Candidate landing area locations in high altitude scenarios(excerpt)
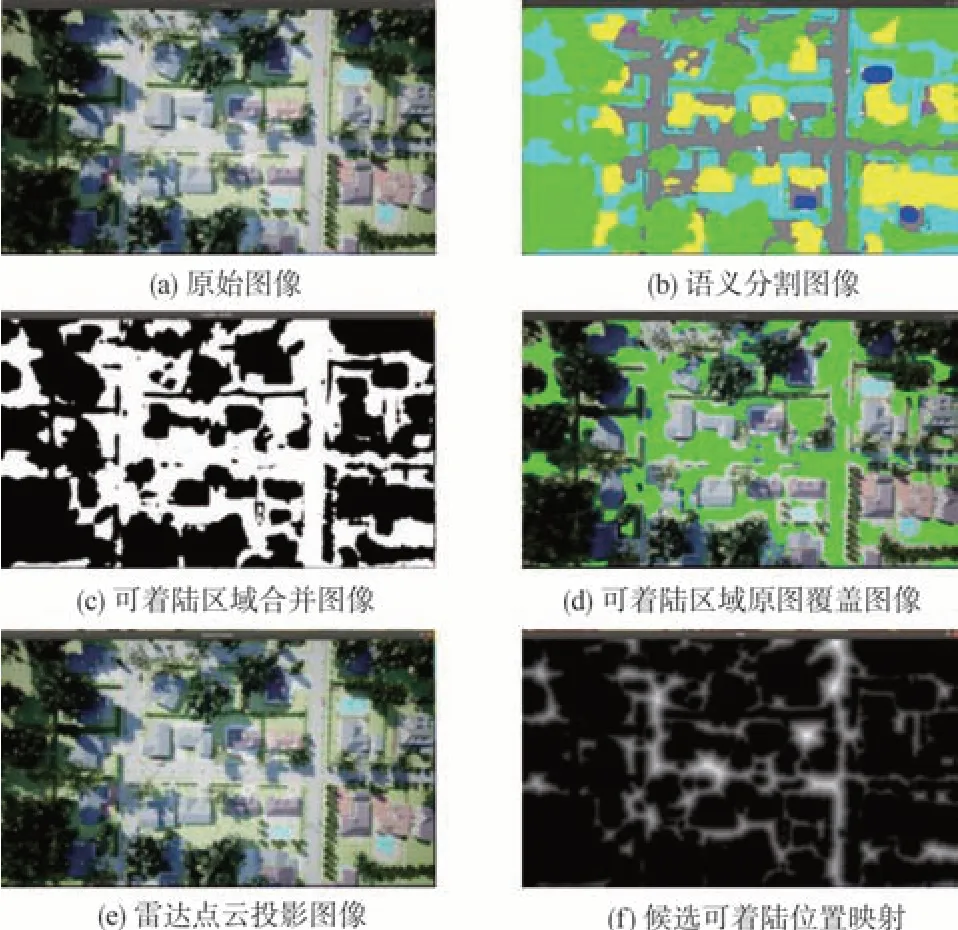
圖14 高空場景實(shí)際仿真測試圖Fig.14 Actual simulation test diagram of high altitude scene
待飛機(jī)完成引導(dǎo)功能并進(jìn)入中高空場景后,機(jī)載相機(jī)和激光雷達(dá)傳感器對地面的觀測視角更加明晰,通過對同步后的數(shù)據(jù)進(jìn)行圖像語義分割和激光點(diǎn)云處理,可以得到新一批的候選可著陸區(qū)域坐標(biāo)位置,可視化后的圖像如圖15所示,測試截取圖片時(shí)飛機(jī)當(dāng)前高度約為80m,圖15(e)中點(diǎn)云棕色代表紅色占比逐漸增多,離地面越來越近,輸出的可著陸點(diǎn)位置信息見表4,同時(shí)根據(jù)可著陸位置附近的激光雷達(dá)點(diǎn)云進(jìn)行分析,計(jì)算標(biāo)準(zhǔn)差并檢測高度變化,選擇合適坐標(biāo)位置發(fā)送給飛行器引導(dǎo)程序。

表4 中高空場景輸出可著陸區(qū)域坐標(biāo)信息(部分)Table 4 Candidate landing area locations in mid high altitude scene(excerpt)
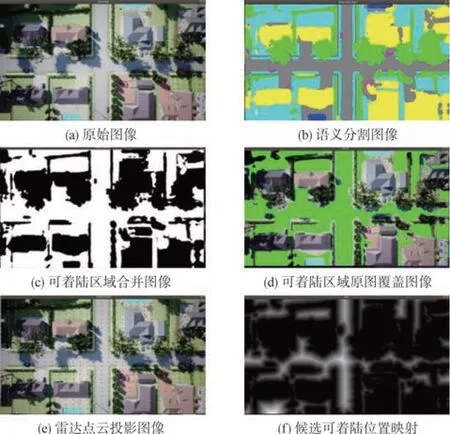
圖15 中高空場景實(shí)際仿真測試圖Fig.15 Actual simulation test diagram of mid high altitude scene
當(dāng)飛行器接近地面進(jìn)行著陸時(shí),具體測試結(jié)果如圖16所示,當(dāng)前高度約為20m,通過圖像語義分割顯示結(jié)果可觀察到飛行器視角內(nèi)大部分都是可著陸區(qū)域范圍,此時(shí)激光雷達(dá)投影到圖像上的點(diǎn)云顏色也已經(jīng)基本為紅色,說明到地面的距離逐漸變小,如圖16(e)所示,可著陸位置信息見表5,最后再融合多源傳感器數(shù)據(jù),以及飛行器相對候選可著陸位置的歐式距離,計(jì)算出最終的著陸位置結(jié)果信息,并引導(dǎo)飛行器著陸。

表5 低空場景輸出可著陸區(qū)域坐標(biāo)信息(部分)Table 5 Candidate landing area locations in low altitude scene(excerpt)
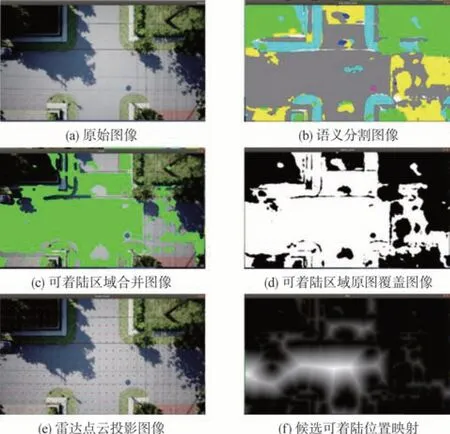
圖16 低空場景實(shí)際仿真測試圖Fig.16 Actual simulation test diagram of low altitude scene
4.3 測試結(jié)果
根據(jù)以上的測試過程得出結(jié)果如下:(1)良好天氣下,無人機(jī)可以通過傳感器融合的方式進(jìn)行主動(dòng)感知,完成飛行器的應(yīng)急著陸功能;(2)在高空場景下,無人機(jī)可通過圖像語義分割的方式對地面區(qū)域進(jìn)行預(yù)篩選,可以快速定位下一階段中高空場景的中心位置;(3)在中高空場景下,無人機(jī)可利用相機(jī)和激光雷達(dá)融合的方式對地面進(jìn)行探測,并可根據(jù)傳感器結(jié)果輸出著陸區(qū)域位置;(4)在低空場景下,無人機(jī)主要通過相機(jī)對地面如車輛、電線桿等危險(xiǎn)障礙物進(jìn)行識(shí)別躲避,同時(shí)可根據(jù)豐富的點(diǎn)云信息對地面信息進(jìn)行三維重建,引導(dǎo)無人機(jī)實(shí)現(xiàn)在當(dāng)前場景安全著陸。
5 結(jié)論
本文研究了無人機(jī)在不同飛行高度階段場景下的應(yīng)急著陸處理程序,結(jié)果表明,采用基于多傳感器融合的方式可以實(shí)現(xiàn)無人機(jī)在未知場景下的應(yīng)急著陸功能,同時(shí)針對不同傳感器性能要求,對無人機(jī)飛行剖面進(jìn)行切分判斷,能夠充分發(fā)揮各個(gè)傳感器的優(yōu)勢特點(diǎn),實(shí)現(xiàn)不同場景的有效切換,快速找到可供著陸的最佳區(qū)域。真實(shí)無人機(jī)的運(yùn)行場景會(huì)相較仿真場景有更多的不確定性,因此需要針對無人機(jī)真實(shí)場景進(jìn)行數(shù)據(jù)采集和語義分割模型訓(xùn)練,同時(shí)針對非測繪用激光雷達(dá)垂直視角與圖像視角不匹配的問題,應(yīng)采取多幀點(diǎn)云拼接的方式實(shí)現(xiàn)下視圖像的點(diǎn)云覆蓋。因此,針對以上真實(shí)場景的問題,應(yīng)首先選擇合適的傳感器硬件,優(yōu)化合理布局機(jī)載傳感器系統(tǒng),不斷更新算法,增強(qiáng)無人機(jī)的穩(wěn)定性。
基于多傳感器融合的應(yīng)急著陸功能是一項(xiàng)新技術(shù),對于無人機(jī)在飛任務(wù)的安全性和可靠性有了進(jìn)一步的提升,同時(shí)增強(qiáng)了無人機(jī)的自主感知能力,可通過周圍態(tài)勢環(huán)境執(zhí)行響應(yīng)的飛行工作,對推動(dòng)無人機(jī)運(yùn)行安全性的發(fā)展起到重要推動(dòng)作用。
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中華手工(2017年2期)2017-06-06 23:00:31
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中外會(huì)展(2014年4期)2014-11-27 07:46:46
民生周刊(2012年10期)2012-10-14 09:06:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32