基于KL散度的緊組合導航欺騙式干擾檢測方法
2022-11-28 11:19:56鐘倫瓏劉永玉李雪艷
航空科學技術 2022年11期
鐘倫瓏,劉永玉,李雪艷
1.中國民航大學智能信號與圖像處理天津市重點實驗室,天津 300300
2.中國民航大學,天津 300300
全球導航衛星系統(GNSS)為航空領域提供覆蓋全球的高性能導航信息。國際民航組織(ICAO)將其選作新一代區域導航系統的主用系統,規定使用民用GNSS 信號進行導航。但是,由于民用GNSS 信號的碼字信息和信號結構是公開的,GNSS 導航容易受到蓄意的欺騙式干擾影響[1-2]。及時、有效的欺騙式干擾檢測技術對民航飛行安全至關重要。根據檢測數據的來源不同,機載欺騙式干擾檢測技術可分為基于信號處理的檢測技術[3-4]和基于信息解算[5-6]的檢測技術。與基于信號處理的檢測技術相比,基于信息解算的檢測技術無須改變接收機的結構[7],可融合其他無干擾的傳感器信息,提高算法檢測性能,且可嵌入機載組合導航算法中,便于在區域導航計算機中實現。
典型的基于信息解算的欺騙式干擾檢測技術對衛星導航和其他傳感器信息進行一致性檢測[8],如基于GNSS和慣性導航系統(INS)緊組合導航的欺騙式干擾檢測技術[9],利用INS 不受欺騙式干擾影響的特點,使用卡爾曼濾波等方式融合GNSS 測量信息和INS 導航信息,再結合適當的檢測方法判斷GNSS 測量信息和INS 導航信息的一致性,實現欺騙式干擾檢測。傳統的新息序列卡方檢測方法直接以組合導航濾波器新息構建卡方檢測統計量,但卡方檢測容易擴大檢測區域,導致對微小欺騙量檢測延時較大,漏警率較高。為提高算法性能,Bhatti[10]提出將新息的變化率作為檢測統計量,張超[6]提出將抗差估計與新息卡方檢測算法相結合。兩種方法重新構建基于新息的欺騙檢測統計量,提高了對欺騙的檢測效果,但仍不滿足ICAO 對巡航階段的告警時間要求。
KL散度是基于數理統計方法的重要概念之一,能夠有效描述樣本數據可能存在的兩個概率密度分布之間的差異。曹玉蘋[11]等提出基于KL 散度的無跡卡爾曼濾波的過程故障檢測方法,能夠及時檢測出故障的發生。基于故障檢測思想[12],針對GNSS 欺騙式干擾威脅民航飛行安全問題,本文引入KL散度算法,基于緊組合導航濾波過程判斷GNSS是否受到欺騙式干擾。首先使用擴展卡爾曼濾波器進行GNSS的觀測數據和INS的導航數據融合。然后在緊組合系統濾波器輸出新息的概率密度分布基礎上,構建基于KL 散度算法的檢測統計量,進行GNSS 欺騙式干擾檢測。最后進行仿真試驗驗證本文所提方法的有效性。
1 基于偽距測量的欺騙式干擾模型
GNSS欺騙式干擾的根本目的是對用戶接收機造成惡意攻擊,使用戶接收機捕獲到虛假的干擾信號,形成錯誤的測量偽距,導致接收機定位結果偏離真實的用戶目標位置[13]。根據GNSS 基本原理[14],用戶接收機R與第j顆可見衛星的偽距測量值ρj為

式中,rj為用戶接收機R到第j顆可見衛星的真實距離;δtu為GNSS接收機時鐘誤差的等效距離;vρ是接收機內部噪聲與GNSS 測量噪聲總和,vρ~N(0,),σG為偽距測量噪聲標準差。
欺騙式干擾使用戶接收機定位結果偏離真實位置的關鍵是在偽距測量值上引入了附加的偽距欺騙量。當存在欺騙式干擾時,受附加的偽距欺騙量的影響,第j顆可見衛星的偽距測量值變為

式中,Δρj為欺騙式干擾引入的附加偽距。當Δρj=a(a為常值)時,存在突變式欺騙干擾;當Δρj=v(t-ts)時,存在緩變式欺騙干擾,v為偽距欺騙速率,t為導航時間,ts為欺騙發生時刻。
2 基于緊組合導航的欺騙檢測系統模型
GNSS和INS緊組合導航是基于偽距、偽距率的組合導航方式[15]。相對于其他組合導航方式,緊組合導航有更高的精度和更強的抗干擾能力。在GNSS/INS緊組合導航系統中嵌入欺騙式干擾檢測算法,利用卡爾曼濾波器新息的概率密度分布,構建基于KL散度算法的檢測統計量,實現欺騙式干擾檢測功能。檢測無欺騙時系統校正INS進行組合導航輸出,否則系統進行欺騙異常告警。設計的基于緊組合導航的欺騙檢測系統模型如圖1所示。
2.1 緊組合導航系統狀態方程
GNSS/INS 緊組合導航系統的狀態量由INS 的誤差狀態和GNSS 的誤差狀態構成,包括18 維的INS 誤差狀態和二維的GNSS 誤差狀態。由緊組合導航系統理論可知[16],系統狀態方程為

式中,F為狀態轉移矩陣;G為系統噪聲矩陣;W為系統噪聲矢量;X為系統狀態量。
圖1 中,卡爾曼濾波器新息為緊組合導航系統實際量測值與預測值之差。離散化式(3)所示的狀態方程和式(5)所示的觀測方程,可得
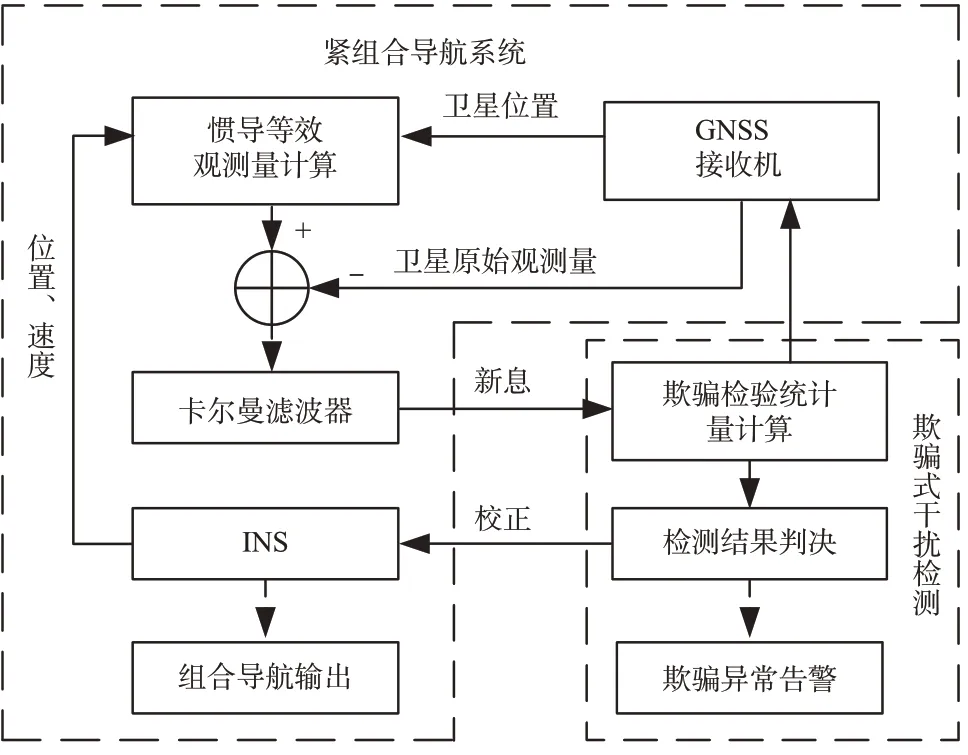
圖1 基于緊組合導航的欺騙檢測系統模型Fig.1 Diagram of tightly-coupled navigation based spoofing interference detection system
式中,φ為東北天方向的姿態角誤差;δv為東北天方向的速度誤差;δ為緯經高方向的位置誤差;ε為INS陀螺儀誤差;?為INS 加速度計零偏;δtu為GNSS 接收機時鐘誤差的等效距離;δtru為GNSS接收機時鐘頻率誤差的等效距離率。
2.2 緊組合導航系統量測方程
GNSS/INS緊組合導航系統量測的實際觀測量由偽距、偽距率量測值構成。偽距、偽距率量測值為INS 等效的偽距、偽距率與GNSS 接收機觀測的偽距、偽距率之差。INS等效的偽距、偽距率由INS推算的載體位置、速度相應與星歷中衛星的位置、速度計算得到。
在地心地固坐標系下[16],GNSS/INS緊組合導航系統量測方程為

式中,H為量測矩陣;V為量測噪聲矢量;X為系統狀態量;Z為系統觀測量,由n顆可見衛星的偽距、偽距率量測值構成,即

式中,ρI,j、ρ?I,j(j=1,…,n)為INS 與第j顆可見衛星等效的偽距、偽距率;ρG,j、ρ?G,j為GNSS 接收機觀測的第j顆可見衛星星歷中原始的偽距、偽距率。
3 基于KL散度的欺騙式干擾檢測方法

式中,k表示當前時刻;Zk為系統觀測量;Xk為系統狀態量;Hk為系統觀測方程;Φk為狀態轉移矩陣;Γk為噪聲分配矩陣;Wk-1與Vk是互不相關的高斯白噪聲。
新息定義為

式中,δZk為濾波器新息矢量;Zk為系統觀測量;Zk|k-1為系統預測值;Xk|k-1為狀態一步預測值;Hk為系統觀測方程。
緊組合導航系統的量測噪聲和系統噪聲均為互不相關的高斯白噪聲,因此衛星未受欺騙時新息服從零均值高斯分布,衛星受欺騙時引入的附加偽距會改變新息值的均值,但新息值依然服從高斯分布。
3.1 傳統的新息序列卡方檢測方法
傳統的新息序列卡方檢測方法利用欺騙式干擾后新息的變化來檢測干擾。若當前時刻GNSS 受到欺騙式干擾,則GNSS 接收機觀測的衛星偽距增大,以致濾波器實際量測值增大。又因濾波器的預測值未受當前時刻欺騙式干擾的影響,從而濾波器新息值增大并反映出欺騙信息。檢測統計量定義為

式中,St(t= 1,2,…,k)為各濾波時刻新息矢量的協方差矩陣。
根據卡方分布分位數的計算原理,可由虛警率Pf確定檢測閾值T。

3.2 基于KL散度的欺騙式干擾檢測方法
通過上述分析可知,衛星受欺騙前后新息的概率密度分布是不同的。利用新息可能存在的兩種概率密度分布,本文基于KL散度構建欺騙檢測統計量,將欺騙誤差信息反映為兩種概率密度分布之間的“距離”大小。與上述的傳統新息序列卡方檢測方法相比,此法可避免卡方檢測統計量容易擴大檢測區域,導致對緩變式欺騙和微小的突變式欺騙檢測易發生漏檢的問題。
KL 散度是一種衡量樣本數據可能存在的兩種概率密度分布之間相似度大小的方法,被廣泛應用在基于數理統計研究方法的信息論領域[17]。假設x存在兩種可能的概率密度函數p(x)和q(x),則KL散度為

KL 散度描述了概率密度函數p(x)和q(x)之間的“距離”,滿足非負特性和非對稱性,當且僅當描述的兩個概率密度函數完全相同時,KL散度取到最小值0。
對第j顆可見星構建基于KL散度算法的欺騙檢測統計量。式(8)中,當前時刻新息矢量δZk的第j行表示第j顆衛星的新息值。以歷史時刻到當前時刻第j顆衛星的新息序列{δZt,j|t= 1,2,…,k}作 為KL 散 度 算 法 檢 測 樣 本xi(i=1,2,…,k),當前時刻的樣本均值和方差定義為

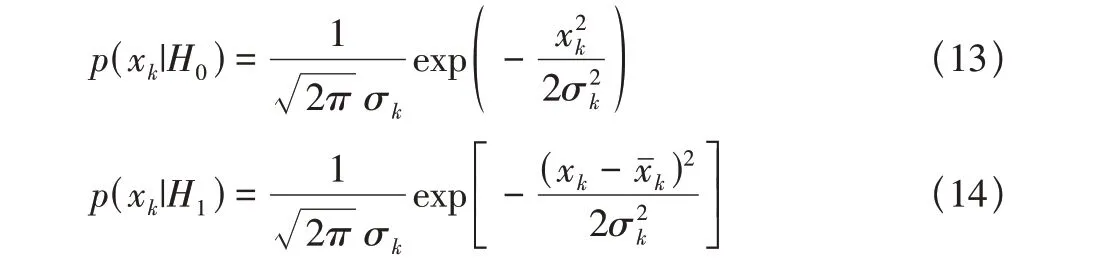
基于二元假設檢驗[18],定義原假設H0:GNSS 未受欺騙,= 0;備擇假設H1:GNSS受欺騙≠0。在二元假設條件下,當前時刻觀測樣本的概率密度函數可表示為
對KL散度進行簡化[11],定義檢測統計量為

將式(13)、式(14)代入式(15),化簡得到檢測統計量

式中,p(xk|H0)為當前時刻GNSS未受到欺騙式干擾時新息的概率密度函數;p(xk|H1)為當前時刻GNSS受到欺騙式干擾時新息的概率密度函數;Dk≥0,當且僅當p(xk|H1)=p(xk|H0)時,Dk= 0。
在欺騙發生后的告警時間內,若Dk>Td,則判斷第j顆衛星受到了欺騙式干擾,否則判斷第j顆衛星未受到欺騙式干擾。檢測門限Td由虛警率Pf和漏警率Pm計算得到。

4 仿真結果與分析
4.1 試驗設置和評價指標
模擬飛機巡航階段中衛星受到不同的欺騙式干擾,對比本文KL 散度檢測方法與傳統新息序列卡方檢測方法的檢測性能。設置三組仿真試驗:試驗1 驗證在突變式欺騙條件下兩種方法的檢測時間;試驗2 驗證在緩變式欺騙條件下兩種方法的檢測時間;試驗3 驗證在不同的欺騙方式下兩種方法的欺騙檢測率。按照ICAO 附件10 標準規定[19],仿真實驗相關參數設置見表1。
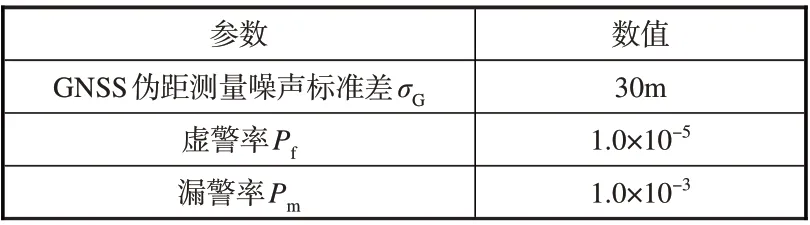
表1 仿真參數Table 1 Simulation parameters
由表1的虛警率和漏警率計算式(10)和式(17)的欺騙檢測閾值。仿真中設置仰角截止角為30o,保持可見星數為5顆,對單星施加欺騙。
試驗1和試驗2中分別施加突變欺騙量和緩變欺騙量,具體的欺騙量設置見表2。
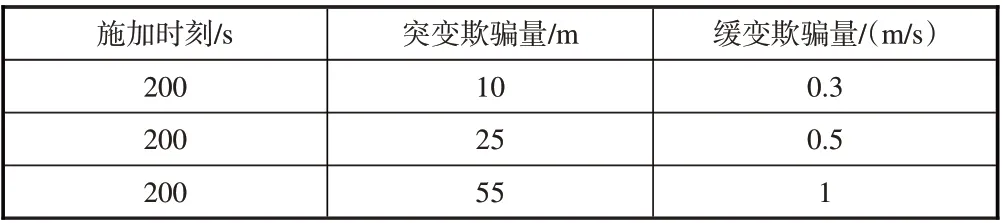
表2 欺騙量設置Table 2 Settings of spoofing amount
由于機載組合導航的卡爾曼濾波估計技術是一種最優估計,很小的欺騙量對組合導航結果影響有限,因此設置的最小突變欺騙量為10m,最小緩變欺騙量為0.3m/s。
試驗3 中不同欺騙方式下對每個偽距欺騙量進行100次蒙特卡羅試驗,計算欺騙檢測率P

式中,ts為欺騙發生時刻;Δt為欺騙告警時間;Num[Dk>Td,ts≤t≤ts+Δt]為成功檢測的試驗次數;N為蒙特卡羅試驗次數。
參照ICAO 附件10 對巡航階段的完好性要求,告警時間Δt取最大值30s,且告警時間內算法欺騙檢測的漏警率不能超過0.001,即在受到欺騙式干擾30s 內檢測算法的欺騙檢測率需超過99.9%。
4.2 仿真結果分析
(1)試驗1
分別施加10m、25m 和55m 的突變欺騙量,KL 散度檢測方法的檢測統計量隨時間的變化如圖2所示。
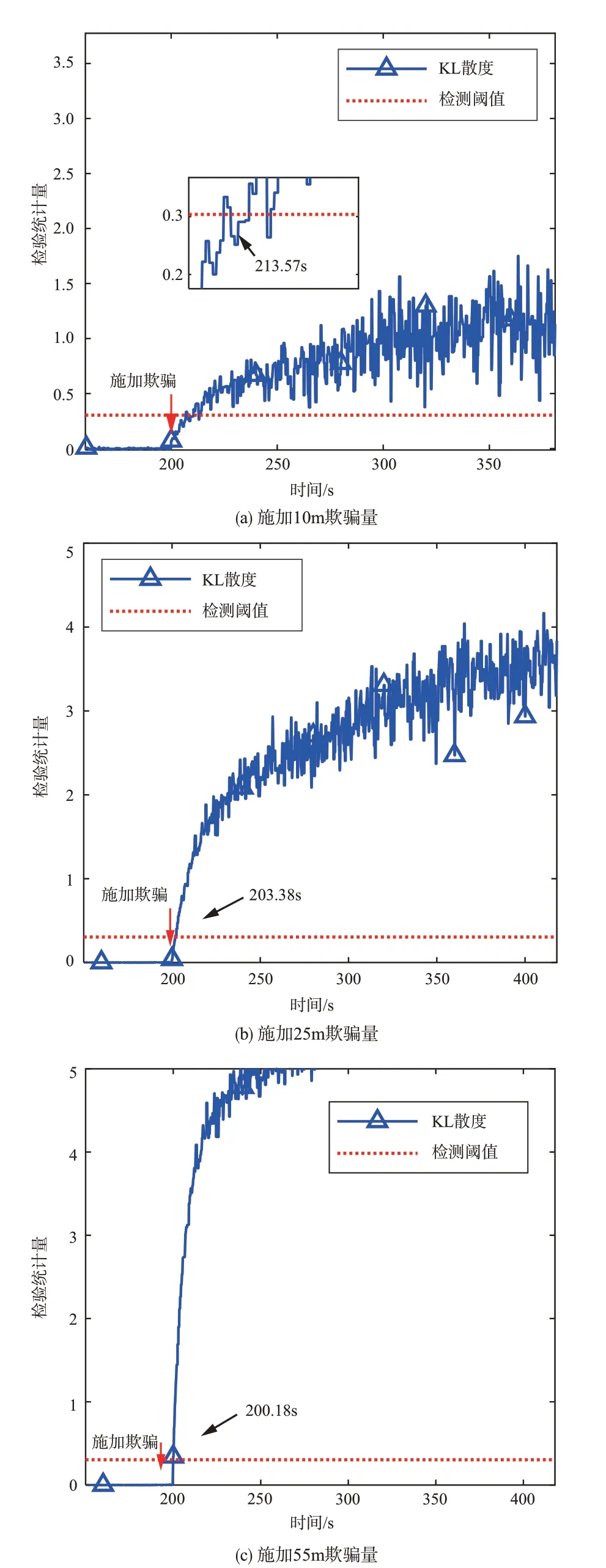
圖2 施加突變欺騙量時KL散度方法檢測時間Fig.2 Detection time of KL divergence method when applying abrupt spoofing amounts
由圖2(a)可以看出,在第200s施加最小10m的突變欺騙量時,KL 散度檢測方法的檢測統計量在第213.57s 超過檢測閾值,滿足ICAO對巡航階段的30s告警時間要求。對比圖2(a)、圖2(b)和圖2(c)可知,KL散度檢測方法的檢測統計量超過檢測閾值的時間隨著突變欺騙量的增大而逐漸減小,即算法的檢測速度隨著突變欺騙量的增大而加快。
對比KL 散度檢測方法與傳統新息序列卡方檢測方法對不同突變欺騙量的檢測時間,見表3。

表3 不同突變欺騙量的檢測時間對比Table 3 Comparison between detection time under different abrupt spoofing amounts
從表3 中可以看出,在相同的突變欺騙量條件下,KL散度檢測方法相較于傳統新息序列卡方檢測方法有效地縮短了欺騙檢測時間。特別是在10m的微小突變欺騙量情況下,傳統新息序列卡方檢測方法不能檢測出欺騙干擾,而KL散度檢測方法能以較快的速度檢測出來。
(2)試驗2
分別施加0.3m/s、0.5m/s 和1m/s 的緩變欺騙量,KL 散度檢測方法的檢測統計量隨時間的變化如圖3所示。
由圖3(a)可看出,在第200s 施加最小0.3m/s 的緩變欺騙量,KL 散度檢測方法的檢測統計量在第225.86s 超過檢測閾值。雖然欺騙檢測延時較長,但仍滿足ICAO 對巡航階段的30s告警時間要求。對比圖3(a)、圖3(b)和圖3(c),算法的檢測速度隨著緩變欺騙速率的增大而加快。
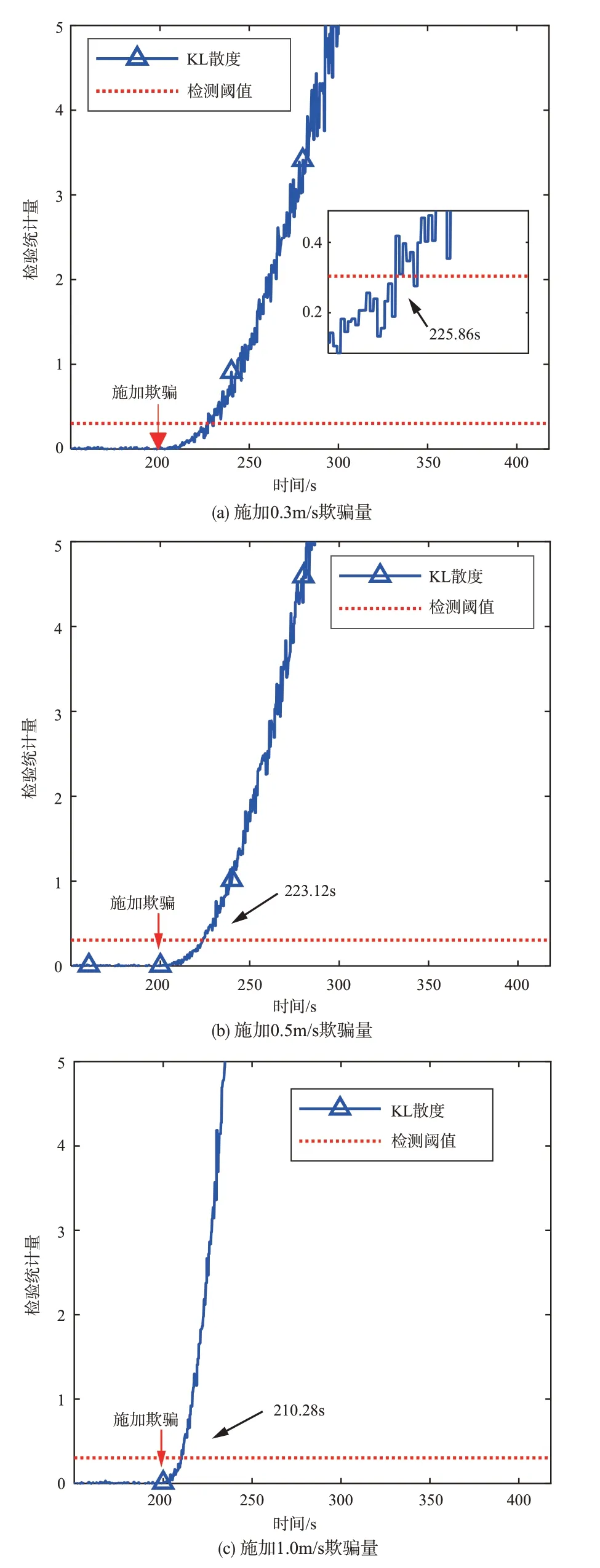
圖3 施加緩變欺騙量時KL散度方法檢測時間Fig.3 Detection time of KL divergence method when applying slowly varying amounts of spoofing
對比KL 散度檢測方法與新息序列卡方檢測方法對不同緩變欺騙量的檢測時間,見表4。
從表4中可以看出,在不同的緩變欺騙量條件下,傳統新息序列卡方檢測方法的檢測時間均不滿足ICAO對巡航階段的30s 告警時間要求。而KL 散度檢測方法相對提高了算法對緩變欺騙量的檢測敏感度,加快了檢測速度。
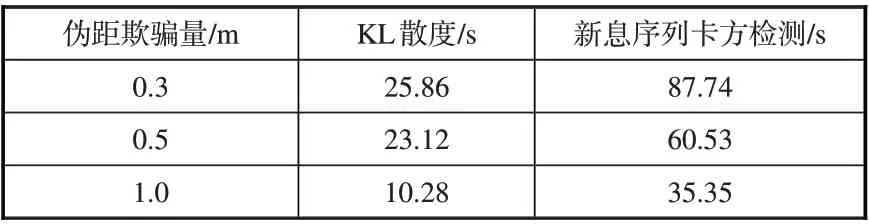
表4 不同緩變欺騙量的檢測時間對比Table 4 Comparison of detection time under different slowly varying amounts of spoofing
(3)試驗3
根據式(19)計算每個偽距欺騙量下的欺騙檢測率。如圖4所示,以5m為間隔施加突變欺騙量,對比KL散度檢測方法和新息序列卡方檢測方法的欺騙檢測率。新息序列卡方檢測方法的欺騙檢測率在突變欺騙量為25m 時收斂到100%。而KL散度檢測方法的欺騙檢測率在欺騙量為10m時即可收斂到100%,相對降低了算法對小于25m的微小欺騙量的檢測漏警率。
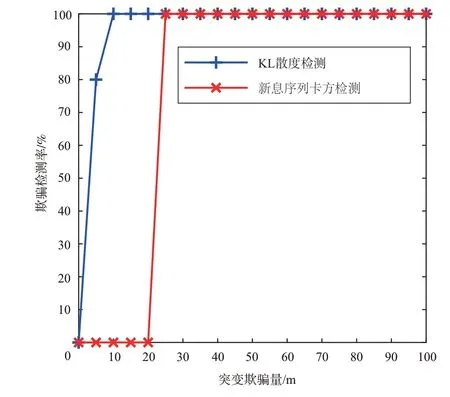
圖4 突變欺騙量條件下兩種方法的檢測率Fig.4 Detection rates of two methods under the condition of abrupt spoofing amounts
如圖5 所示,以0.1m/s 為間隔施加緩變欺騙量,對比KL散度檢測方法和新息序列卡方檢測方法的欺騙檢測率。在施加0.3m/s到1.4m/s的緩變欺騙量時,KL散度欺騙檢測方法的檢測率明顯優于新息序列卡方檢測方法。當緩變欺騙量達到0.3m/s時,本文KL散度檢測方法的欺騙檢測率即可收斂到100%。而新息序列卡方檢測方法的欺騙檢測率在緩變欺騙量達到1.4m/s時才收斂到100%。相比之下,本文方法有效地解決了傳統方法對緩變式欺騙干擾檢測能力差的問題。
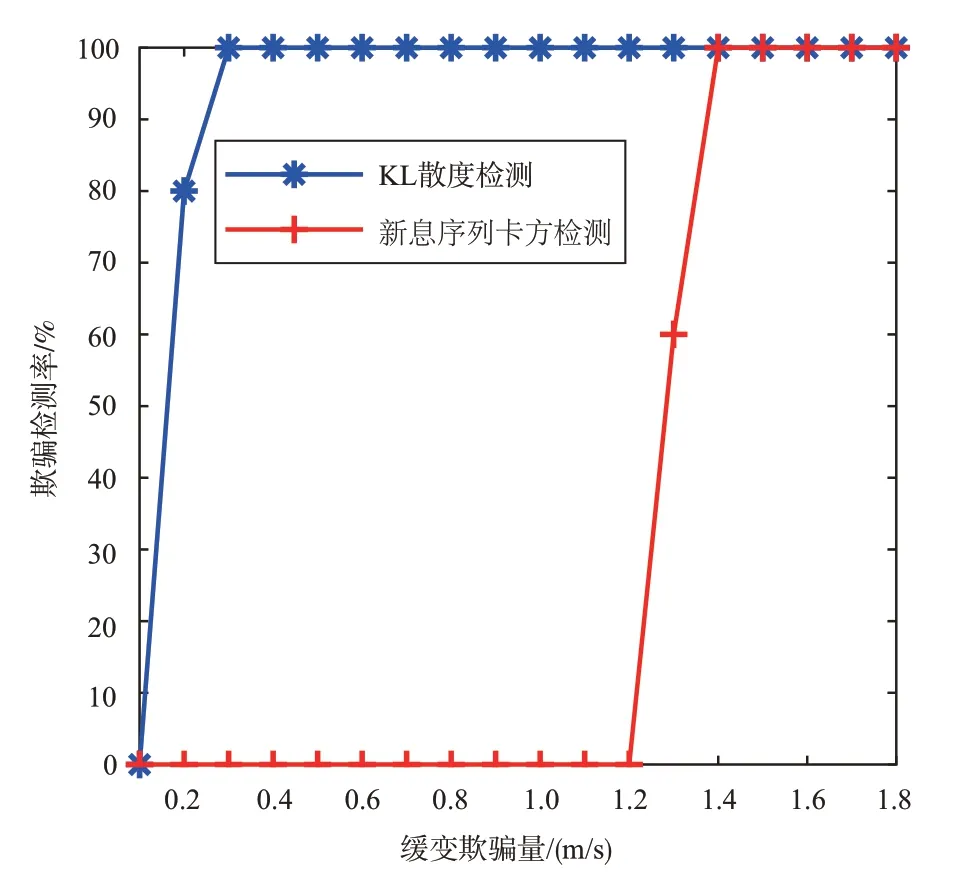
圖5 緩變欺騙量條件下兩種方法的檢測率Fig.5 Detection rates of the two methods under the condition of slowly varying amounts of spoofing
由以上三組仿真試驗可知,本文方法相較于傳統方法對欺騙式干擾的檢測敏感度更高,檢測性能更好。對于突變式欺騙干擾,本文方法可實現10m 以上的突變欺騙量的檢測。對于緩變式欺騙干擾,本文方法可實現0.3m/s 以上的緩變欺騙量的檢測。
5 結束語
本文基于航空運輸飛機的機載電子系統體制,利用機載GNSS 和INS 導航數據,結合KL 散度理論,提出一種GNSS 欺騙式干擾檢測方法。試驗結果表明,相較于傳統方法,本文方法提高了對緩變式欺騙干擾和微小突變式欺騙干擾的檢測能力。同時,本文方法以軟件形式集中進行信息處理,在不增加成本的前提下提高了算法的欺騙檢測率,降低了檢測漏警率。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12