汽車五連桿后懸架機械運動分析及DMU仿真
2022-11-23 05:52:10賈威振馬祖國陳洪正
汽車實用技術 2022年21期
賈威振,馬祖國,陳洪正,于 江
汽車五連桿后懸架機械運動分析及DMU仿真
賈威振1,馬祖國2,陳洪正2,于 江2
(1.寧波極氪智能科技有限公司 杭州分公司,浙江 杭州 310051;2.極氪汽車(寧波杭州灣新區)有限公司,浙江 寧波 315336)
文章介紹了汽車底盤五連桿后懸架的結構、機械運動原理、懸架運動建模和電子樣機(DMU)模型應用,從理論角度分析汽車五連桿后懸架的機械運動原理、計算構件數量、計算運動副數量、計算空間自由度。研究了CATIA DMU運動學建模過程,包括輸入參數、創建零件、創建約束、創建驅動仿真,并用懸架DMU模型解決汽車底盤設計的實際問題,包括校核各運動件間隙預防零件碰撞干涉,制作輪胎運動包絡支持車身造型設計,輸出車輪位移和外傾角關系圖,判斷車輛是否具備優異的運動學特性,輸出車輪前束角和外傾角調節范圍,得到輪心、彈簧、減振器的三者運動的杠桿比,計算懸架零部件的載荷支持懸架設計。研究成果在汽車設計領域具有較廣泛的應用價值。
五連桿懸架;機械原理;自由度;DMU仿真;汽車底盤;機械運動分析;CATIA
在車輛底盤研發過程中,會遇到以下實際問題:例如汽車機械運動原理自由度如何計算,在車輪上下跳動過程中,各個擺臂、驅動軸、連桿、減震器、彈簧是否干涉,需要計算零件之間的間隙。車輪在過坑、過坎、縱向沖擊等工況下,如何制作輪胎包絡支持車身造型設計。車輛是否有較好的運動特性,四輪定位參數數值和變化斜率是多少。輪心載荷、彈簧載荷、減振器載荷、緩沖塊載荷的相關性是什么。為了解決以上汽車研發的問題,本文解析汽車機械運動原理圖,計算機構的自由度,創建五連桿后懸架運動學模型并應用仿真。
1 五連桿后懸架簡介
1.1 五連桿后懸架結構和功能
汽車的底盤懸架結構是汽車的重要結構裝置,承擔著汽車整個車身以及車輪的力矩,保證車輛能夠安全穩定地行駛[1]。
五連桿后懸架包括后副車架、前上擺臂、后上擺臂、前下擺臂、后下擺臂、前束桿、前束角偏心螺栓、外傾角偏心螺栓、后減振器、后穩定桿、穩定桿連桿、轉向節等零部件,結構如圖1所示。
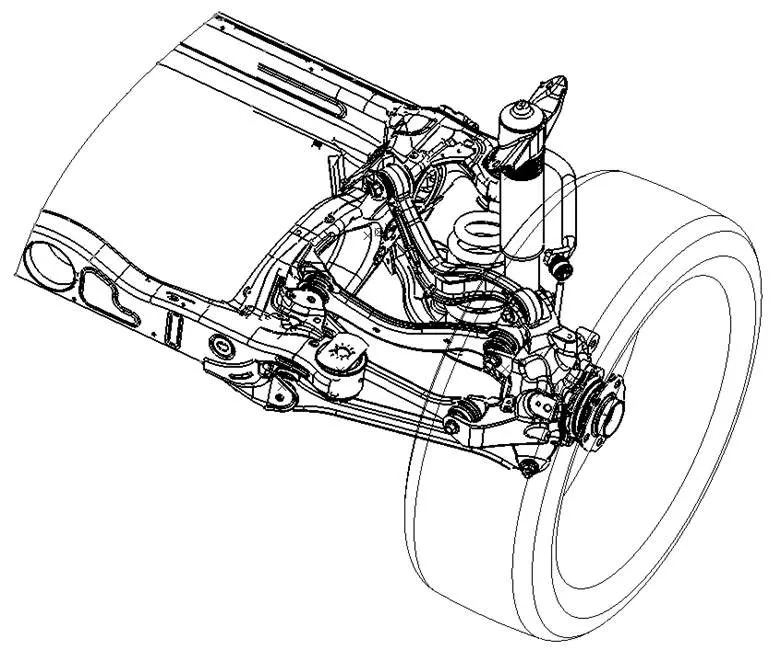
圖1 五連桿后懸架結構圖
五連桿后懸架各擺臂用途不同,其按功能可分為調節前束角的擺臂、調節外傾角的擺臂,支撐彈簧垂向載荷的擺臂、傳遞縱向側向載荷的擺臂。五個擺臂共同控制了后車輪的運動軌跡,使車輛具備優異的運動特性。
控制臂本體是鋼或鋁材料的,用于傳遞側向力。控制臂的兩端是橡膠,它緩沖了沖擊載荷,釋放五個擺臂的自由度,避免機構過約束。
彈簧是支撐整車重量的零件,彈簧包括2個核心參數,分別是剛度(單位:N/mm)和載荷(單位:N)。車輪在上極限、設計狀態、下極限各狀態下,彈簧均處于被壓縮狀態,均有載荷。
車輪上跳時減振器被壓縮,車輪下跳時減振器伸張[2]。減振器上端連接車身,下端連接擺臂,組成滑動副,控制著車輪向運動。
穩定桿是繞副車架做旋轉運動的零部件。車輛在側傾時穩定桿一端向上運動,另一端向下運動,此時穩定桿扭轉變形。車輛垂向運動時穩定桿兩端同時向上或向下運動,此時穩定桿襯套扭轉變形。
穩定桿連桿的兩端是球鉸或襯套。穩定桿連桿是二力桿,它傳遞了穩定桿的垂向力。球鉸和襯套釋放穩定桿的自由度,使得機構能運動。
偏心螺栓在副車架的長圓孔中移動,它拉動擺臂改變位置,從而調整了車輪的外傾角和前束角。
2 機械運動原理
2.1 構件數量計算
構件是指機械中的一個獨立的運動單元,機架是機械運動中的固定構件[3]。原動件是按照給定已知的運動規律獨立運動的構件,從動件指其余活動構件。汽車懸架的機構組成及分類如表1所示。
2.2 運動副數量計算
運動副指兩個構件直接接觸組成的可動連接[3]。運動副按相對運動形式分為旋轉副、滑動副、球鉸副、剛性副、萬向節副、點面副、點線副、圓柱副、螺釘副、平面副等。運動副的分類和定義如表2所示。
表1 機構組成及分類
序號構件分類備注 1后副車架和車身機架1個 2前上擺臂從動件10個 3后上擺臂從動件 4前下擺臂從動件 5后下擺臂(后外傾桿)從動件 6前束桿從動件 7后減振器活塞桿從動件 8后減振器油筒從動件 9后轉向節單元從動件 10后穩定桿從動件 11后連桿從動件 12前束角偏心螺栓原動件3個 13外傾角偏心螺栓原動件 14后輪心垂向滑塊原動件
表2 運動副的分類和定義
序號圖標分類自由度定義 1固定副0一個部件相對另外一個部件沒有運動 2旋轉副1一個部件相對于另一個部件的旋轉運動,其共用1個旋轉軸 3滑動副1一個部件相對于另一個部件的平移運動,其共用1個滑動軸 4球鉸副3一個零件相對于另一個零件的三個旋轉運動,同時保持2個部件的鉸接點重合 5剛性副0一個部件連接另外一個部件,沒有運動 6萬向節副2一個部件相對另外一個部件的兩個旋轉運動,同時保持2個部件的鉸接點重合 7點面副5一個零件相對另一個零件的兩個滑動和三個旋轉運動 8點線副4一個零件相對另外一個零件的一個滑動和三個轉動 9圓柱副2一個零件相對另外一個部件的滑動和轉動 10螺釘副2一個零件相對另外一個部件的滑動和轉動 11平面副3一個部件相對另外一個部件的XY平面運動
2.3 空間自由度計算
在空間中每個構件都有6個自由度,即3個相對移動的自由度和3個相對轉動的自由度[3]。用表示運動副的自由度,它指兩構件之間允許產生的相對運動的數目。用表示約束度,它指在運動副中自由度受到的約束的數目,滿足關系式+=6。機構運動圖如圖2所示。
此運動模型可以簡化為基本模塊和其它模塊。基本模塊包含5個擺臂、1個轉向節、1個副車架、1個輪心垂向移動。其他模塊包含前束調節螺栓+外傾調節螺栓+穩定桿和連桿總成。汽車懸架約束和主動件的數量如表3所示。
表3 約束和主動件數量
序號項目I級運動副約束數主動件數 1機架100 2構件1300 3萬向節副740 4球頭副730 5滑動副450 6點面副110 7旋轉副150 8前束角偏心螺栓001 9外傾角偏心螺栓001 10車輪垂向運動001
自由度的計算表達式為
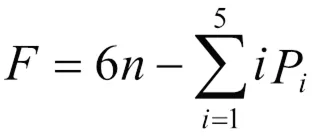
式中,為活動件個數;為約束數;P為級運動副。
自由度數=13×6?(7×4+7×3+4×5+1×1+1×5)=3;主動件數=自由度=3,因此,機構可以運動。
3 懸架運動建模
3.1 輸入參數
懸架運動件建模時需要輸入以下參數,如表4所示。
表4 輸入參數項目
項目硬點及行程參數數值 硬點副車架前安裝點坐標(X,Y,Z) 副車架后安裝點 前上擺臂內點 前上擺臂外點 后上擺臂內點 后上擺臂外點 前下擺臂內點 前下擺臂外點 后下擺臂內點 后下擺臂外點 前束桿內點 前束桿外點 后減振器上點 后減振器下點 后輪心 穩定桿安裝點 連桿上點 連桿下點 四輪定位參數前束角 外傾角 前束桿偏心螺栓行程 外傾桿偏心螺栓行程 行程車輪上行程 車輪下行程
3.2 創建構件
依次創建后副車架和車身、前上擺臂、后上擺臂、前下擺臂、后下擺臂、前束桿、前束桿偏心螺栓、外傾桿偏心螺栓、后減振器活塞桿、后減振器油筒、后穩定桿、后連桿、轉向節、垂向滑塊(Aux_z)等零部件,零件裝配圖如圖3所示。
3.3 創建約束
各零件之間的約束關系如表5所示,各零件約束圖如圖4所示。
3.4 創建驅動仿真
點擊仿真按鈕并輸入車輪行程和偏心螺栓的行程,如圖5所示。
4 懸架DMU模型應用
4.1 應用一:運動件間隙校核
在車輪上下跳動過程中,校核各運動件的間隙,預防各擺臂運動碰撞干涉,如圖6所示。
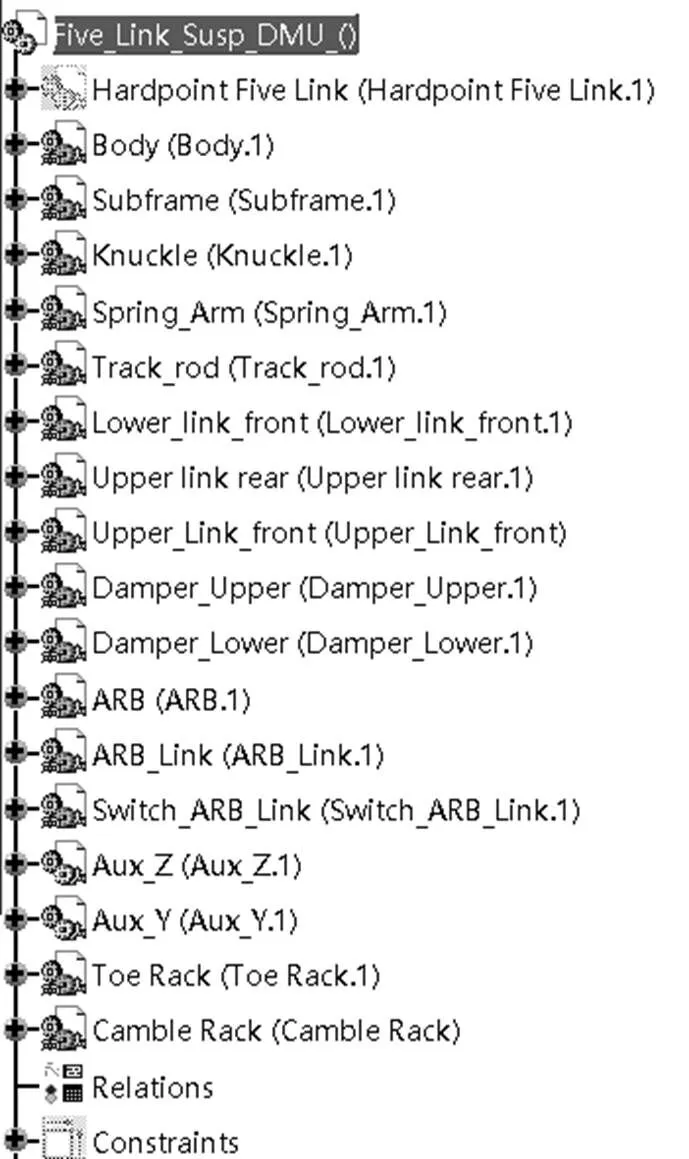
圖3 零件裝配圖
表5 零件約束關系
序號第一零件第二零件約束關系 1后副車架和車身地面固定副 2前上擺臂后副車架萬向節副 3后上擺臂后副車架萬向節副 4前下擺臂后副車架萬向節副 5后下擺臂外傾桿偏心螺栓萬向節副 6前束桿前束桿偏心螺栓萬向節副 7前束桿偏心螺栓后副車架滑動副 8外傾桿偏心螺栓后副車架滑動副 9前上擺臂后轉向節球鉸副 10后上擺臂后轉向節球鉸副 11前下擺臂后轉向節球鉸副 12后下擺臂后轉向節球鉸副 13前束桿后轉向節球鉸副 14后減振器活塞桿車身球鉸副 15后減振器活塞桿后減振器油筒滑動副 16后減振器油筒下擺臂萬向節副 17轉向節輪心垂向滑塊點面副 18垂向滑塊副車架垂向滑軌滑動副 19后穩定桿后副車架旋轉副 20后穩定桿后連桿萬向節副 21后連桿后擺臂球鉸副
同時在本懸架DMU基礎上,工程師可以用VB 編程語言對CATIA 進行二次開發,生成自動測量懸架零部件運動間隙程序,利用程序設計語言調用 CATIA 自動化對象,自動對懸架零部件的運動間隙進行測量,并繪制成曲線圖[4]。

圖4 零件約束圖
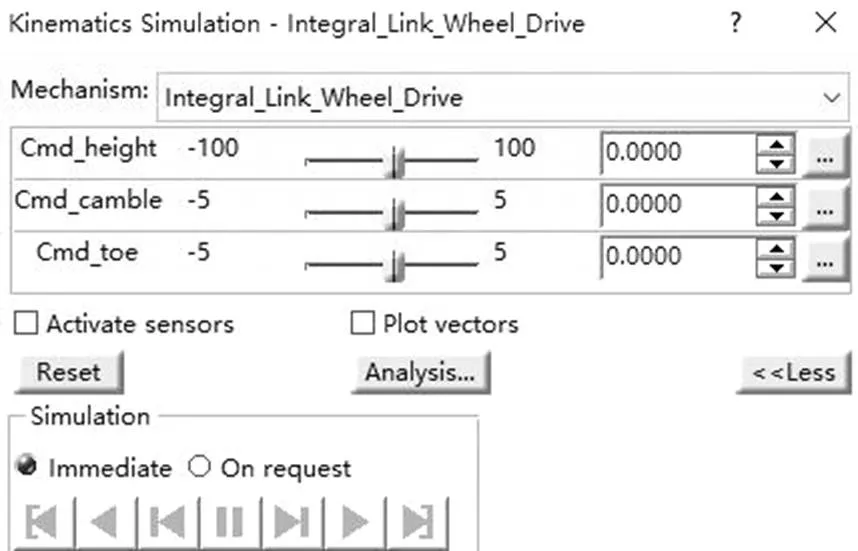
圖5 驅動仿真圖
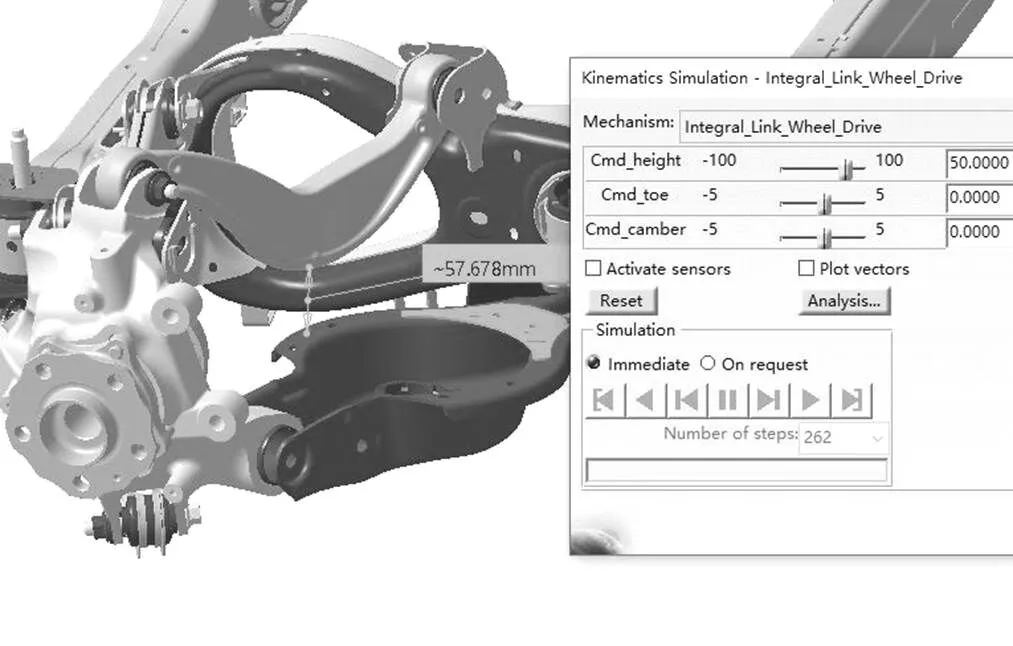
圖6 校核運動件間隙圖
4.2 應用二:制作輪胎包絡支持
車輛行駛過程中車輪上下前后運動。本模型可生成輪胎包絡,用于車身設計和造型設計,如圖7所示。

圖7 輪胎包絡圖
通過對輪胎與輪罩間隙設計的因素進行研究分析和整車耐久試驗數據對比,工程師可以制定輪胎包絡規范,預防新車型輪胎撞擊輪罩[5]。
4.3 應用三:輸出輪心坐標和四輪定位參數
輸出輪心和擺臂硬點位置,如圖8所示;輸出車輪行程和外傾角關系圖,如圖9所示。輸出調整偏心螺栓后的外傾角和前束角。

圖8 輪心位置圖
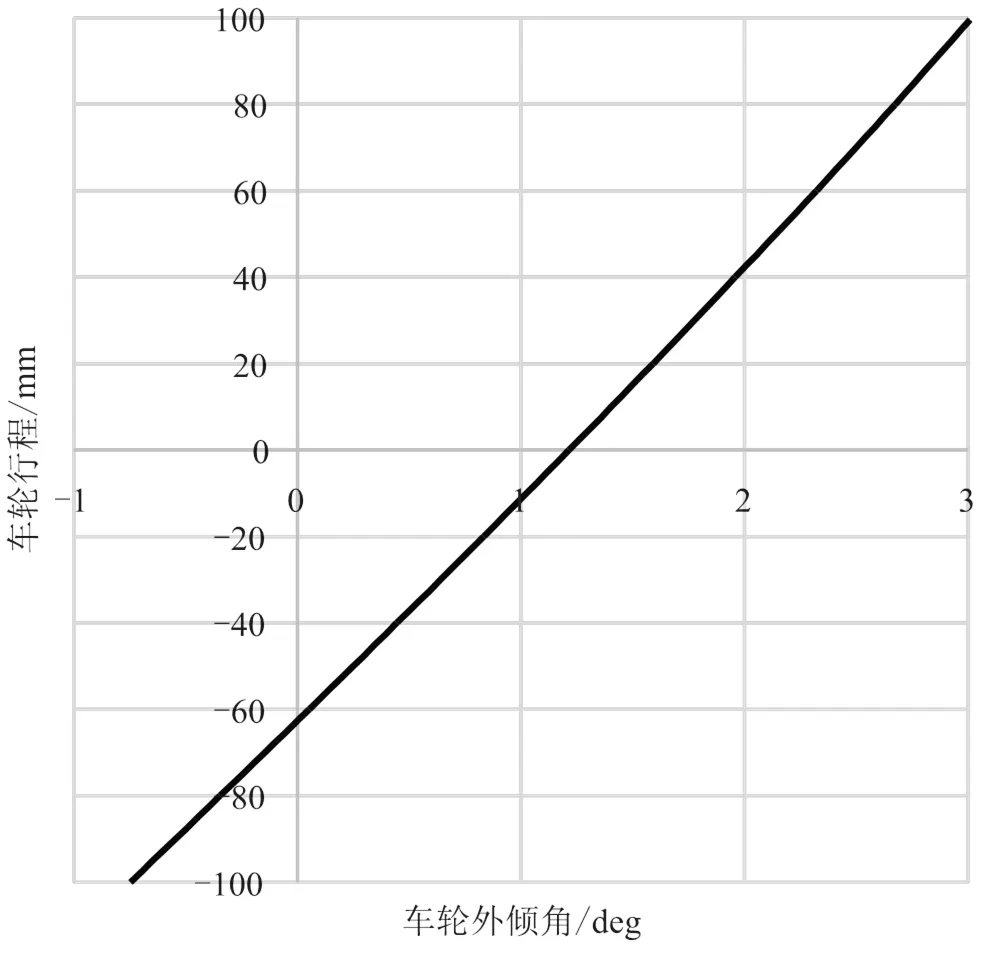
圖9 車輪行程和外傾角關系圖
本DMU模型可用于設計四輪定位目標值和公差,預防車輛跑偏。避免車輛行駛跑偏造成的啃胎和輪胎磨損。駕駛員不需要長期在方向盤上施加一個與跑偏方向相反的作用力,避免了駕駛員疲勞[6]。
4.4 應用四:懸架載荷分析
通過DMU獲取車輪彈簧減振器的杠桿比,在得知軸荷、零件剛度等參數下,可計算車輪、彈簧緩沖塊的受力載荷,支持懸架零部件設計。如圖10所示。
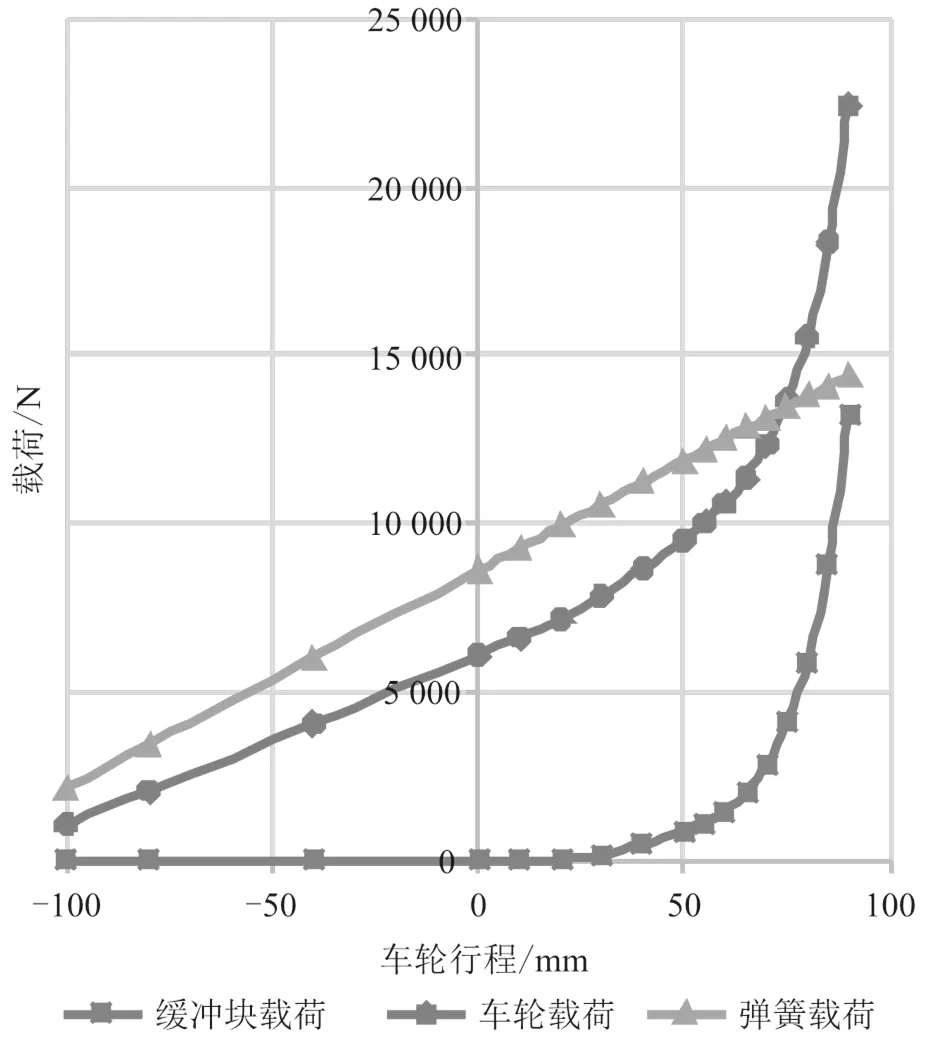
圖10 車輪行程-載荷關系圖
5 結論
本文旨在解決汽車設計中遇到的實際問題,校核零部件間隙,制作輪胎包絡,提取四輪定位參數曲線,計算零部件載荷。
本文從理論力學和機械原理角度,通過計算構件數量,計算運動副數量,計算空間自由度,解釋了后懸架機械運動原理。同時本文詳細介紹了汽車五連桿后懸架DMU建模方法。
本文實用性強,在汽車設計領域具有廣泛的應用價值。
[1] 俞海平.汽車底盤懸架結構設計要點分析[J].內燃機與配件,2022(11):20-22.
[2] 王霄鋒.汽車懸架和轉向系統設計[M].北京:清華大學出版社,2015.
[3] 孫恒,葛文杰.機械原理[M].北京:高等教育出版社, 2021.
[4] 段維.懸架零部件運動間隙自動測量程序開發[J].汽車實用技術,2022,47(6):36-42.
[5] 劉明,劉春梅,韓權武.車輪與輪胎設計間隙研究[J].時代汽車,2021(3):124-125.
[6] 劉杰,鄭小龍.基于六西格瑪的車輛跑偏問題分析[J].時代汽車,2022(12):22-24.
Mechanical Motion Analysis and DMU Simulation of Automotive Five-link Rear Suspension
JIA Weizhen1, MA Zuguo2, CHEN Hongzheng2, YU Jiang2
( 1.Hangzhou Branch, Ningbo ZEEKR Intelligent Technology Company Limited, Hangzhou 310051, China;2.ZEEKR Automobile (Ningbo Hangzhou Bay New Zone) Company Limited, Ningbo 315336, China )
This article introduced the structure, mechanical motion principle, suspension motion modeling, and digital mock-up (DMU) model application of the automotive chassis five-link rear suspension. This article analyzed the mechanical motion principle of the automotive five-link rear suspension from a theoretical point of view, calculated the number of components, calculated the number of motion pairs, and calculated the degree of freedom of space. This article detailed the CATIA DMU kinematic modeling process, including input parameters, creating parts, creating constraints, and creating drive simulations. This article used the suspension DMU model to solve the practical problems of automotive chassis design, including checking the clearance of each moving part to prevent part collision interference. Make tire sports envelopes to support body styling. Output the wheel displacement and camber relationship diagram to determine whether the vehicle had excellent kinematic characteristics. Output wheel toe angle and camber adjustment range. Obtain the lever ratio of the movement of the wheel center, spring, and shock absorber, and calculate the load of the suspension part to support the suspension design. This article has a wide application value in the field of automotive design.
Five-link suspension; Mechanical principle; Degree of freedom; DMU simulation;Automotive chassis;Mechanical motion analysis;CATIA
U463.33+1
A
1671-7988(2022)21-102-06
U463.33+1
A
1671-7988(2022)21-102-06
10.16638/j.cnki.1671-7988.2022.021.019
賈威振(1989—),男,工程師,研究方向為汽車底盤懸架集成研發,E-mail:jiaweizhen1989@163.com。
