旋翼懸停狀態(tài)形變特性及其對(duì)噪聲的影響
2022-11-09 04:21:48李志彬曹亞雄林永峰袁明川
空氣動(dòng)力學(xué)學(xué)報(bào) 2022年5期
李志彬,曹亞雄,林永峰,孫 偉,袁明川
(中國(guó)直升機(jī)設(shè)計(jì)研究所 直升機(jī)旋翼動(dòng)力學(xué)重點(diǎn)實(shí)驗(yàn)室,景德鎮(zhèn) 333001)
0 引 言
為滿足民用方面日益嚴(yán)格的適航噪聲要求和軍用方面聲隱身能力提升需求,直升機(jī)的噪聲問(wèn)題需要持續(xù)深入研究[1-2]。旋翼氣動(dòng)噪聲作為直升機(jī)的最主要噪聲源之一,對(duì)其進(jìn)行準(zhǔn)確預(yù)估是十分必要的[3-4]。目前直升機(jī)旋翼噪聲預(yù)測(cè)領(lǐng)域的大部分研究都集中在開(kāi)發(fā)工具上,這些基于槳葉幾何外形輸入的計(jì)算模型在設(shè)計(jì)階段就能夠確定旋翼噪聲特性[5-9]。
對(duì)于飛行中的直升機(jī),其旋翼槳葉運(yùn)動(dòng)是非常復(fù)雜的。除了跟隨機(jī)體的運(yùn)動(dòng)(加速、滾轉(zhuǎn)、傾轉(zhuǎn)、偏航)和自身的旋轉(zhuǎn)運(yùn)動(dòng)(耦合變距、揮舞、擺振),槳葉幾何外形還會(huì)經(jīng)歷顯著的彈性形變,包括彎曲和扭轉(zhuǎn)。彈性形變對(duì)于旋翼氣動(dòng)力存在很大影響。當(dāng)槳葉在負(fù)載作用下扭轉(zhuǎn)時(shí),局部的迎角可能和剛性槳葉運(yùn)動(dòng)時(shí)所設(shè)置的迎角有很大不同。相應(yīng)的,這一現(xiàn)象會(huì)改變槳葉表面的升力和阻力分布,同樣也會(huì)影響槳葉尾跡。旋翼槳葉在結(jié)構(gòu)上是細(xì)長(zhǎng)的柔性體,尤其是目前的槳葉大多采用復(fù)合材料,在負(fù)載的作用下可以輕易使槳尖位置彎曲超出旋翼平面一倍弦長(zhǎng),相應(yīng)的會(huì)影響槳尖渦位置和槳渦干擾的方向。任何氣動(dòng)力方面的改變都會(huì)通過(guò)載荷噪聲部分來(lái)影響聲學(xué)特性。因此,在設(shè)計(jì)階段將剛性槳葉外形作為模型輸入是不準(zhǔn)確的。
研究者們意識(shí)到了這一點(diǎn),開(kāi)始考慮槳葉彈性形變。在之前大多數(shù)考慮槳葉形變研究中,使用包含柔性槳葉動(dòng)力學(xué)和空氣動(dòng)力學(xué)的載荷計(jì)算,用來(lái)使聲學(xué)代碼能夠分析大部分由于槳葉形變帶來(lái)的噪聲影響。但是,這些研究在噪聲計(jì)算方面并沒(méi)有考慮槳葉的彈性形變,導(dǎo)致噪聲預(yù)測(cè)是不準(zhǔn)確的[10-11]。載荷噪聲并非只與載荷相關(guān),而且還和聲源位置和聲源位置的時(shí)間導(dǎo)數(shù)有關(guān),精確的載荷計(jì)算并不足以糾正這些聲源位置和運(yùn)動(dòng)的錯(cuò)誤。進(jìn)一步講,旋翼平面內(nèi)的噪聲主要是厚度噪聲,厚度噪聲強(qiáng)烈的依賴于槳葉表面的位置、速度和加速度。這些量都需要根據(jù)槳葉彈性形變進(jìn)行重新計(jì)算。
鑒于此,本文基于Camrad Ⅱ軟件和FW-H 方程建立旋翼懸停氣動(dòng)噪聲計(jì)算模型,旋翼槳葉幾何外形和旋翼非定常載荷計(jì)算均考慮了槳葉彈性形變的影響。旋翼的操縱量、形變量和非定常載荷均由Camrad Ⅱ軟件計(jì)算得到。采用三維網(wǎng)格對(duì)形變槳葉的外形進(jìn)行精確描述,結(jié)合Camrad Ⅱ計(jì)算得到的旋翼非定常載荷,之后基于FW-H 計(jì)算方法進(jìn)行形變旋翼懸停氣動(dòng)噪聲計(jì)算。在風(fēng)洞中采用雙目立體視覺(jué)方法對(duì)模型旋翼進(jìn)行形變測(cè)量試驗(yàn),將Camrad Ⅱ的仿真數(shù)據(jù)與試驗(yàn)數(shù)據(jù)進(jìn)行對(duì)比分析,驗(yàn)證CamradⅡ計(jì)算槳葉形變的能力。最后,針對(duì)全尺寸旋翼的懸停噪聲進(jìn)行計(jì)算,分析槳葉形變對(duì)氣動(dòng)力和噪聲的影響。
1 計(jì)算方法
1.1 旋翼載荷及形變計(jì)算
Camrad Ⅱ軟件具有強(qiáng)大的旋翼飛行器綜合分析能力,在直升機(jī)領(lǐng)域中應(yīng)用廣泛。本文采用CamradⅡ軟件計(jì)算旋翼槳葉的非定常氣動(dòng)載荷,經(jīng)數(shù)據(jù)后處理程序計(jì)算得到槳葉固定坐標(biāo)系下沿槳葉展向分布的升力系數(shù),配平后的旋翼操縱量也可以相應(yīng)得到。
為考慮槳葉彈性形變的影響,分別采用CamradⅡ的剛性槳葉模型和彈性槳葉模型計(jì)算形變前后的槳葉操縱量、槳葉外形和旋翼非定常載荷。槳葉截面翼型的形變量在本文中被合理忽略,Camrad Ⅱ只對(duì)槳葉扭轉(zhuǎn)和彎曲變形進(jìn)行仿真。非定常載荷計(jì)算中選用Camrad Ⅱ自帶的配平模塊。
1.2 聲學(xué)計(jì)算方法
FW-H 方程是計(jì)算旋翼氣動(dòng)噪聲的經(jīng)典方程。對(duì)于亞聲速狀態(tài)的旋翼噪聲,F(xiàn)arassat 1A 公式(以下通稱F 1A 公式)是FW-H 方程解的時(shí)域積分表達(dá)式:
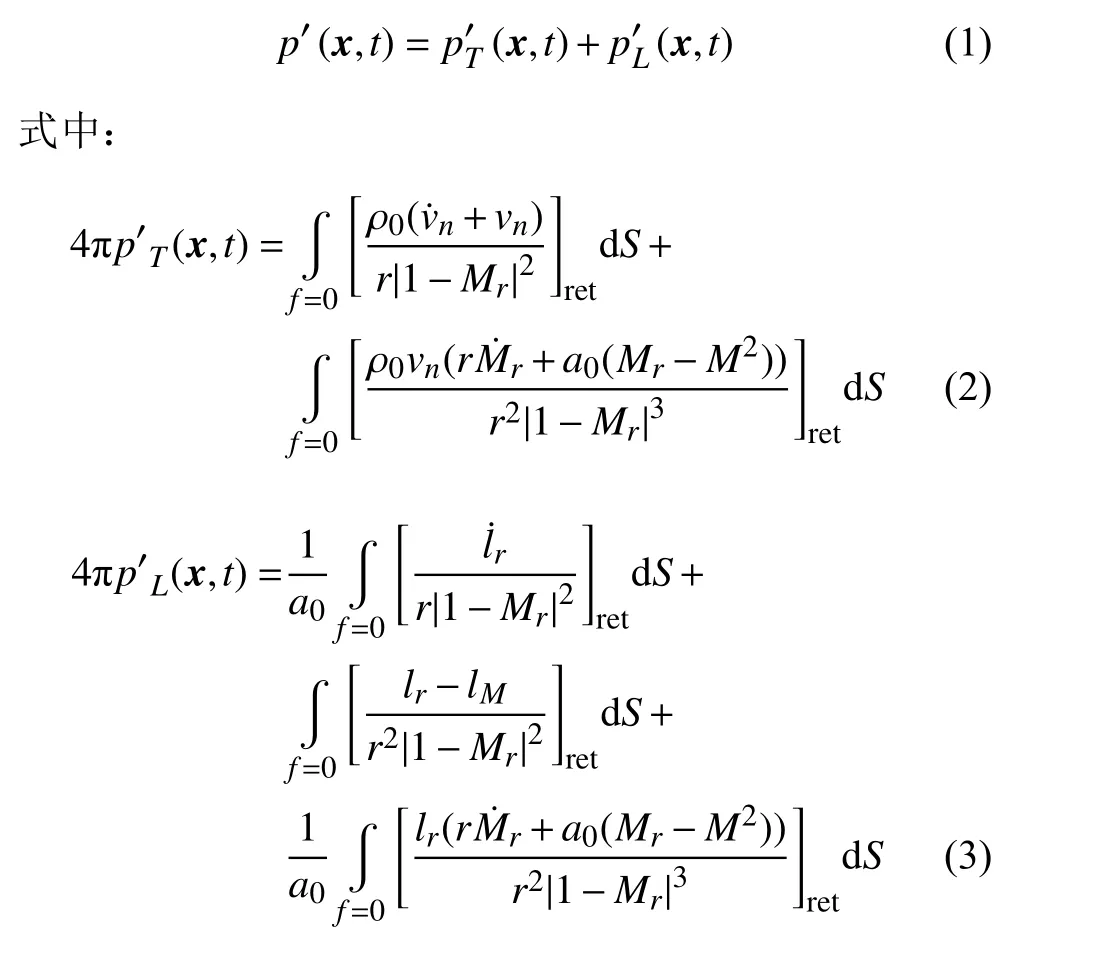
以上公式的詳細(xì)推導(dǎo)和參數(shù)定義可參考文獻(xiàn)[12]。公式(3)中的槳葉表面分布載荷一般由CFD 方法提供。
綜合分析軟件通常不能計(jì)算公式(3)中槳葉表面壓力分布的載荷,而是輸出沿展向分布的槳葉截面升力。一種不需要槳葉表面壓力分布的載荷噪聲預(yù)測(cè)方法就是基于緊致源模型,將F 1A 公式中的載荷噪聲部分寫(xiě)成緊致源形式[13-14]:
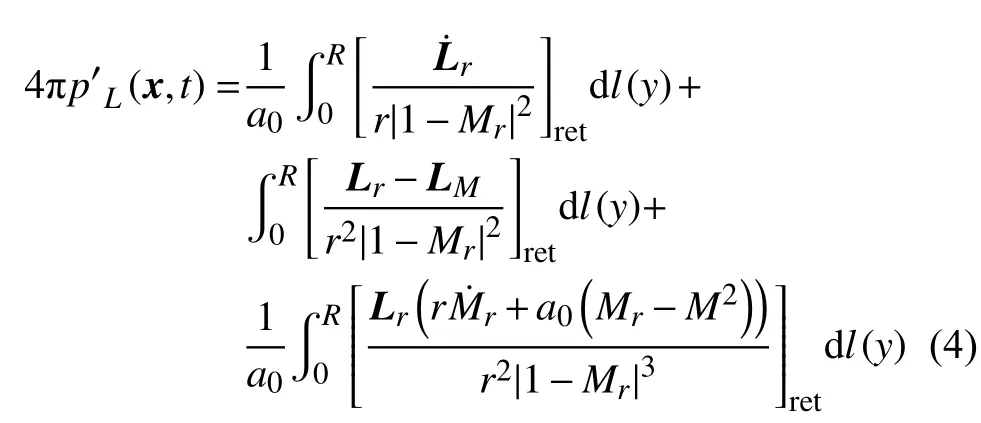
以上公式的詳細(xì)推導(dǎo)和參數(shù)定義可參考文獻(xiàn)[15]。文獻(xiàn)[15]充分對(duì)比了Camrad Ⅱ/FW-H 模型和CFD/FW-H模型,發(fā)現(xiàn)兩種方法的計(jì)算精度相當(dāng),尤其對(duì)于懸停狀態(tài)。本文將使用Camrad Ⅱ/FW-H 模型進(jìn)行噪聲計(jì)算。
1.3 槳葉表面網(wǎng)格劃分
懸停狀態(tài)下旋翼在每個(gè)方位角受到相同的負(fù)載,導(dǎo)致旋翼在旋轉(zhuǎn)過(guò)程中的彈性形變是一樣的,因此僅需要根據(jù)某一方位角下的形變量對(duì)槳葉外形進(jìn)行網(wǎng)格劃分。
槳葉表面網(wǎng)格劃分的簡(jiǎn)要步驟如下:首先將槳葉分解為二維翼型和一維展向站位點(diǎn)[15-16],之后將二維翼型按照展向站位點(diǎn)進(jìn)行平鋪,最后根據(jù)基準(zhǔn)量和彈性形變量對(duì)各個(gè)站位的二維翼型進(jìn)行坐標(biāo)變換,得到槳葉表面的三維面網(wǎng)格,如圖1 所示。詳細(xì)步驟可參考文獻(xiàn)[16]。槳葉形變前后的示意圖如圖2 所示。
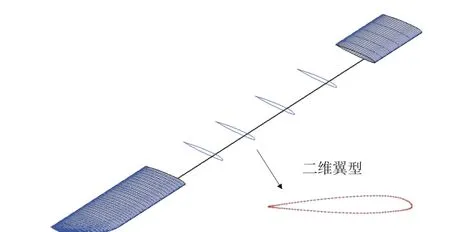
圖1 單片槳葉網(wǎng)格劃分Fig. 1 Grid for a single blade
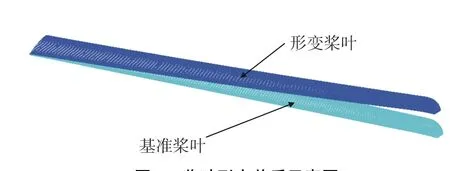
圖2 槳葉形變前后示意圖Fig. 2 Original and deformed blades
2 計(jì)算方法驗(yàn)證
Camrad Ⅱ計(jì)算槳葉非定常載荷的能力已經(jīng)在文獻(xiàn)[17]中得到驗(yàn)證,但文獻(xiàn)[17]中對(duì)Camrad Ⅱ計(jì)算槳葉形變能力的驗(yàn)證不充分。本文基于雙目立體視覺(jué)方法對(duì)直升機(jī)旋翼槳葉形變進(jìn)行測(cè)量[18-20],用于對(duì)比分析Camrad Ⅱ計(jì)算槳葉形變的能力。同時(shí),還將對(duì)考慮槳葉彈性形變的旋翼懸停氣動(dòng)噪聲計(jì)算模型進(jìn)行驗(yàn)證。
2.1 槳葉形變測(cè)量設(shè)備與方法
在中國(guó)空氣動(dòng)力學(xué)研究與發(fā)展中心4 m×5.5 m 聲學(xué)風(fēng)洞開(kāi)展了3 m 級(jí)直徑模型旋翼風(fēng)洞試驗(yàn),測(cè)量了模型旋翼的性能數(shù)據(jù)和形變數(shù)據(jù)。試驗(yàn)中采用無(wú)鉸式槳榖,模型旋翼具有5 片槳葉,直徑為3 m,槳尖速度為221 m/s。槳葉弦長(zhǎng)0.095 m,槳尖拋物線后掠,線性扭轉(zhuǎn)。
試驗(yàn)前,在旋翼槳葉表面1/4 弦線和3/4 弦線處粘貼具有唯一編碼信息的標(biāo)記點(diǎn),如圖3 所示。
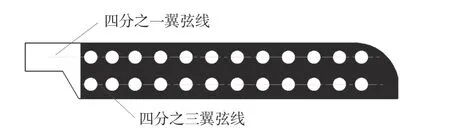
圖3 槳葉表面標(biāo)記點(diǎn)布置示意圖Fig. 3 Schematic diagram of sprayed markers on the blade
試驗(yàn)中,采用高頻激光器對(duì)穩(wěn)定運(yùn)轉(zhuǎn)后的旋翼進(jìn)行瞬態(tài)照明,照明同步觸發(fā)兩部高速相機(jī)進(jìn)行槳葉圖像采集。
試驗(yàn)后,基于雙目立體視覺(jué)原理對(duì)圖像進(jìn)行處理,計(jì)算得到所有標(biāo)記點(diǎn)的三維坐標(biāo)。最后,與基準(zhǔn)狀態(tài)進(jìn)行對(duì)比,可以進(jìn)一步得到旋翼槳葉的形變參數(shù),在試驗(yàn)中忽略了翼型的幾何外形變化。雙目成像系統(tǒng)結(jié)構(gòu)如圖4 所示,詳細(xì)的測(cè)量原理可以參考文獻(xiàn)[20],這里不再贅述。
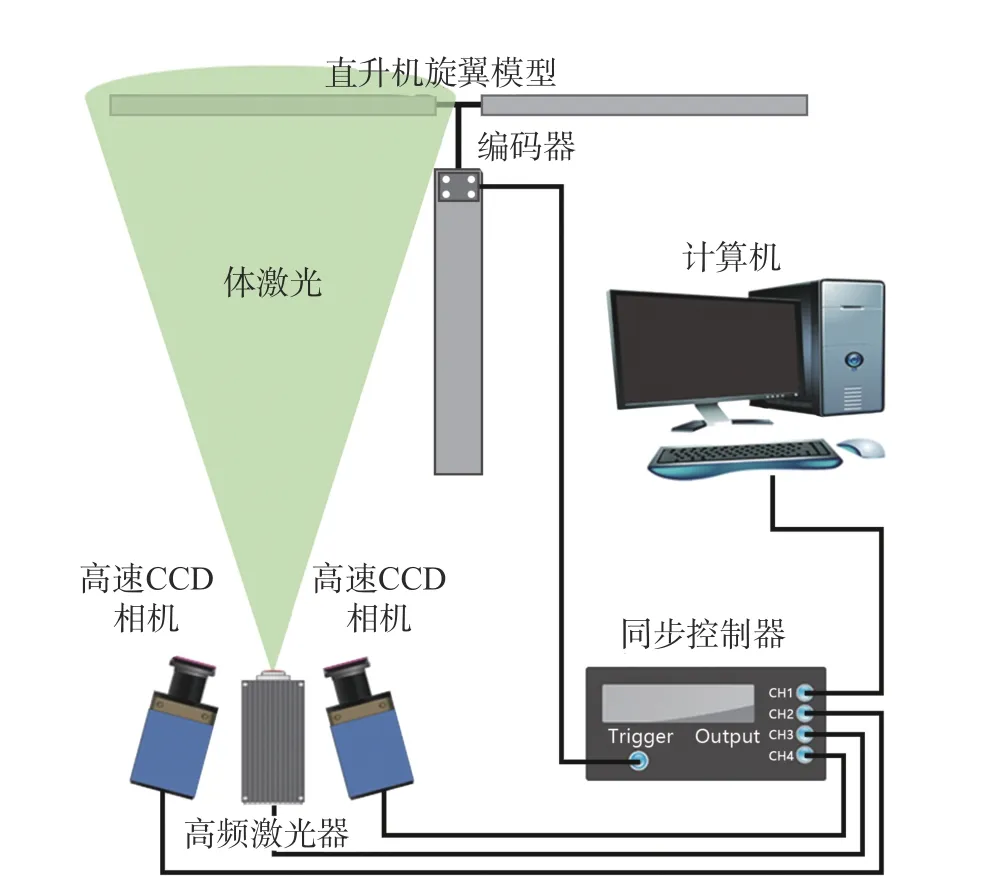
圖4 雙目成像系統(tǒng)結(jié)構(gòu)[20]Fig. 4 Binocular imaging system
2.2 槳葉形變計(jì)算與試驗(yàn)對(duì)比
由于旋翼模型槳葉重力的作用,在靜止?fàn)顟B(tài)下,槳尖揮舞位移相對(duì)槳盤(pán)平面為負(fù)值,因此試驗(yàn)中選取50 r/min、0°總距狀態(tài)為基準(zhǔn)狀態(tài),即認(rèn)為這一狀態(tài)下槳葉的揮舞位移和扭轉(zhuǎn)形變量幾乎為0。Camrad Ⅱ計(jì)算與試驗(yàn)的結(jié)果均扣除了50 r/min、0°總距狀態(tài)下的槳葉基準(zhǔn)形變量。
圖5 給出了旋翼槳葉形變測(cè)量重復(fù)性試驗(yàn)結(jié)果,對(duì)應(yīng)的總距為8°、位置為0.7R。本文定義向上揮舞為正,與旋轉(zhuǎn)方向相反的擺振為正。試驗(yàn)中每隔12°方位角對(duì)旋翼槳葉采集一次圖像,進(jìn)行槳葉形變分析。由于懸停狀態(tài)幾乎沒(méi)有揮舞一階量,因此在各方位角處測(cè)得的揮舞形變量相差不大。從圖中可以看出,槳葉揮舞位移的七次重復(fù)性試驗(yàn)數(shù)據(jù)都重合得很好,證明了本次試驗(yàn)數(shù)據(jù)的有效性和可靠性。圖6 和圖7 中的試驗(yàn)結(jié)果均為一個(gè)周期各個(gè)方位角試驗(yàn)值算數(shù)平均后的結(jié)果。
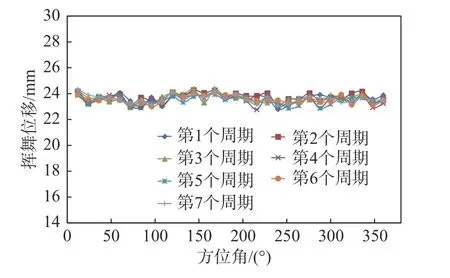
圖5 懸停狀態(tài)重復(fù)試驗(yàn)結(jié)果對(duì)比(總距8°、r = 0.7R)Fig. 5 Repeatability test results of a blade in hover(Collective pitch = 8°, r = 0.7R)
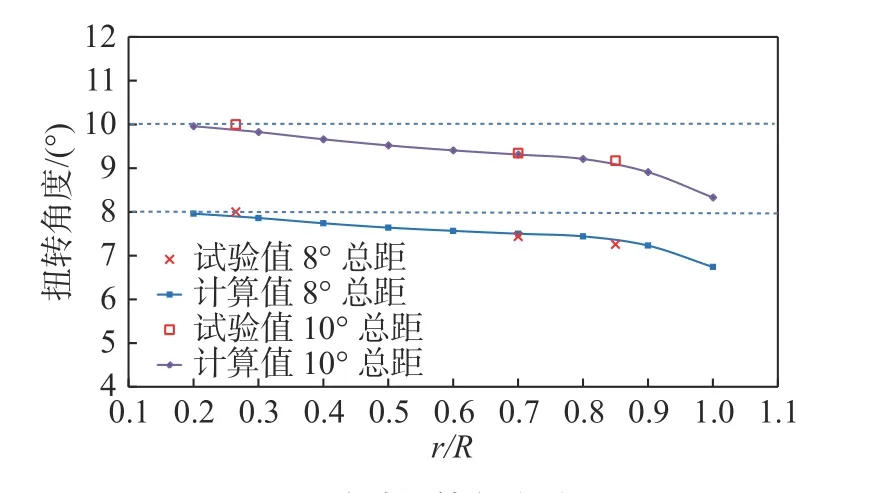
圖7 槳葉扭轉(zhuǎn)角度對(duì)比Fig. 7 Comparison of the twist deformation
圖6 為不同總距下槳葉揮舞位移試驗(yàn)與計(jì)算對(duì)比結(jié)果。由圖中可以看出,隨著總距增加,旋翼槳葉揮舞位移隨之增大。Camrad Ⅱ計(jì)算得到的槳葉揮舞位移無(wú)論從趨勢(shì)還是位移量方面均與試驗(yàn)結(jié)果吻合較好。針對(duì)10°總距的狀態(tài),槳尖沿?fù)]舞方向的位移量達(dá)到0.5 倍弦長(zhǎng)。
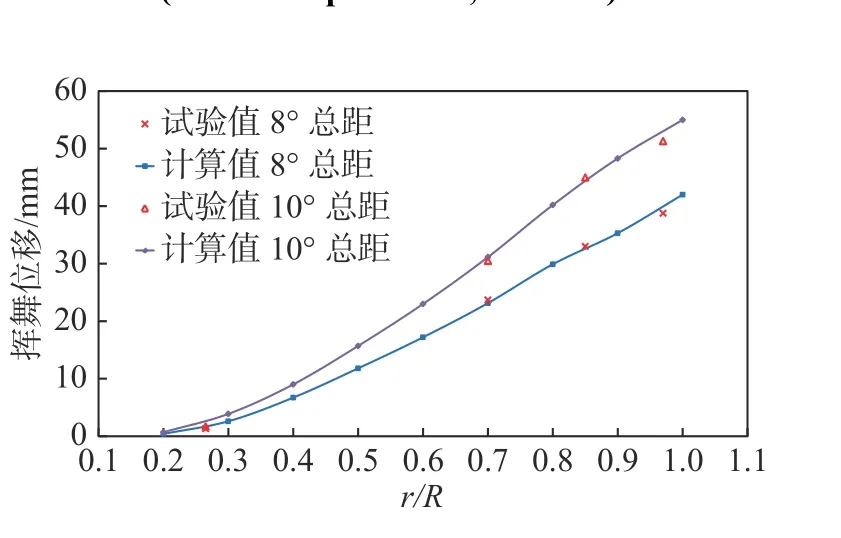
圖6 揮舞位移量對(duì)比Fig. 6 Comparison of the flap deformation
圖7 為不同總距下槳葉扭轉(zhuǎn)角度試驗(yàn)值與計(jì)算值對(duì)比結(jié)果,其中忽略了槳葉自身的扭轉(zhuǎn)角。由于槳尖采用尖削結(jié)構(gòu),無(wú)法布置兩個(gè)標(biāo)記點(diǎn),導(dǎo)致扭轉(zhuǎn)角測(cè)試不準(zhǔn)確,因此試驗(yàn)值并沒(méi)有選在槳尖區(qū)域。從圖中可以看出,Camrad Ⅱ計(jì)算得到的槳葉扭轉(zhuǎn)角度與試驗(yàn)結(jié)果吻合較好。
2.3 噪聲計(jì)算方法驗(yàn)證
在中國(guó)空氣動(dòng)力學(xué)研究與發(fā)展中心4 m×5.5 m 聲學(xué)風(fēng)洞開(kāi)展了2 m 級(jí)直徑模型旋翼風(fēng)洞試驗(yàn),測(cè)量了模型旋翼的性能數(shù)據(jù)和噪聲數(shù)據(jù)。試驗(yàn)中的模型旋翼具有5 片槳葉,直徑為2 m。槳葉弦長(zhǎng)0.062 m,槳尖拋物線后掠,線性扭轉(zhuǎn)。試驗(yàn)中槳尖轉(zhuǎn)速為208.3 m/s。圖8 中給出了槳盤(pán)平面內(nèi)和槳盤(pán)夾角20°處聲壓歷程的本文計(jì)算值與試驗(yàn)值對(duì)比。
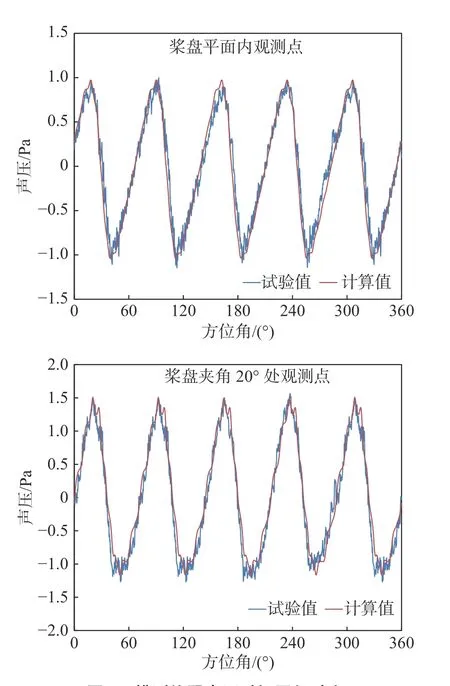
圖8 模型旋翼聲壓時(shí)間歷程對(duì)比Fig. 8 Time histories of sound pressure obtained by the experiment and numerical simulation
從圖中可以看出,本文建立的旋翼噪聲計(jì)算模型計(jì)算得到的觀測(cè)點(diǎn)處的聲壓歷程與試驗(yàn)值吻合得很好,表明了本文建立的方法的有效性。
3 計(jì)算與分析
本節(jié)針對(duì)全尺寸旋翼進(jìn)行懸停狀態(tài)噪聲計(jì)算,分析了槳葉形變對(duì)噪聲輻射特性的影響。此外,還對(duì)槳葉形變量和氣動(dòng)力特性進(jìn)行了分析。
3.1 計(jì)算模型
為開(kāi)展槳葉形變對(duì)旋翼懸停狀態(tài)氣動(dòng)噪聲特性的影響分析研究,選用一副全尺寸旋翼作為研究對(duì)象。采用的旋翼半徑為6.75 m,具有5 片槳葉。槳葉采用的翼型為OA309,槳葉弦長(zhǎng)0.42 m,槳尖拋物線后掠,-12°線性扭轉(zhuǎn)。旋翼額定槳尖速度為216.4 m/s。
在對(duì)比噪聲的計(jì)算結(jié)果時(shí),必須保證是在旋翼負(fù)載相同的情況下,因此,必須要進(jìn)行配平計(jì)算。選取該全尺寸旋翼典型使用狀態(tài)下的拉力系數(shù)0.015 作為配平目標(biāo)量。
本文選取縱向平面內(nèi)槳盤(pán)夾角0°~80°(槳盤(pán)下方)的9 個(gè)觀測(cè)點(diǎn)進(jìn)行噪聲計(jì)算,觀測(cè)點(diǎn)與槳盤(pán)中心的距離為5R。觀測(cè)點(diǎn)布置如圖9 所示。
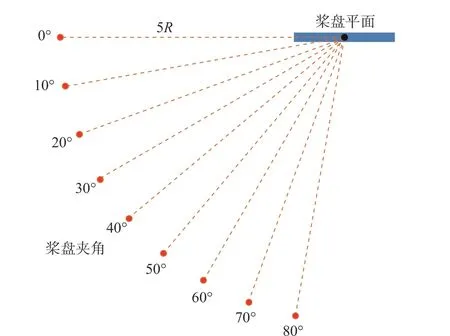
圖9 觀測(cè)點(diǎn)位置示意圖Fig. 9 Diagram of the acoustic observing points
3.2 旋翼形變計(jì)算
在旋翼非定常載荷計(jì)算模型中,每片槳葉采用11 個(gè)非線性梁?jiǎn)卧#科瑯~包含15 個(gè)槳葉載荷輸出剖面。分別采用CAMRAD Ⅱ中的剛性槳葉模型和彈性槳葉模型對(duì)形變前后槳葉進(jìn)行計(jì)算。圖10為基準(zhǔn)旋翼和形變旋翼的扭轉(zhuǎn)角分布(不含操縱總距)。從圖中可以看出,槳葉扭轉(zhuǎn)形變量從槳葉根部到槳尖逐漸增大,扭轉(zhuǎn)率從-12°/R 近似變?yōu)?13°/R。圖11 為槳葉沿?fù)]舞方向和擺振方向的形變量。從圖中可以看出,兩種形變量從槳根到槳尖均呈增大趨勢(shì),沿?fù)]舞方向的形變量更大。槳尖沿?fù)]舞方向的形變量達(dá)到了0.8 倍弦長(zhǎng)。
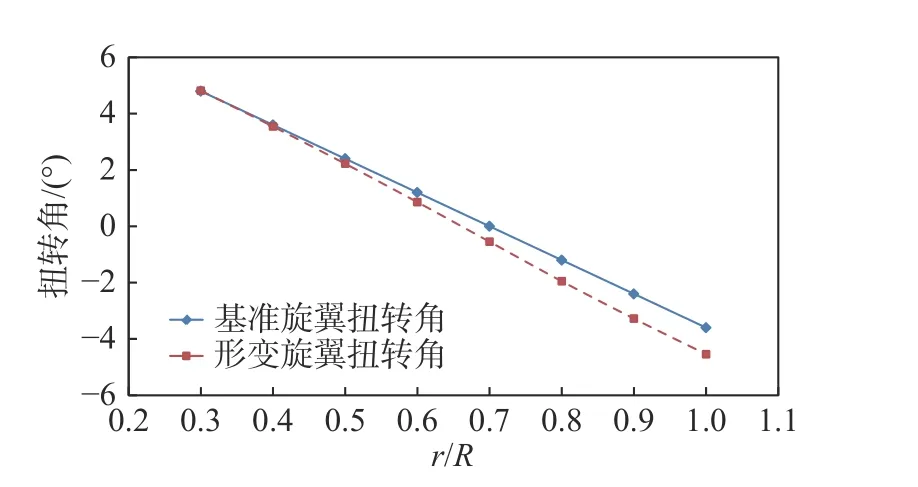
圖10 旋翼扭轉(zhuǎn)角分布Fig. 10 Distribution of blade twist
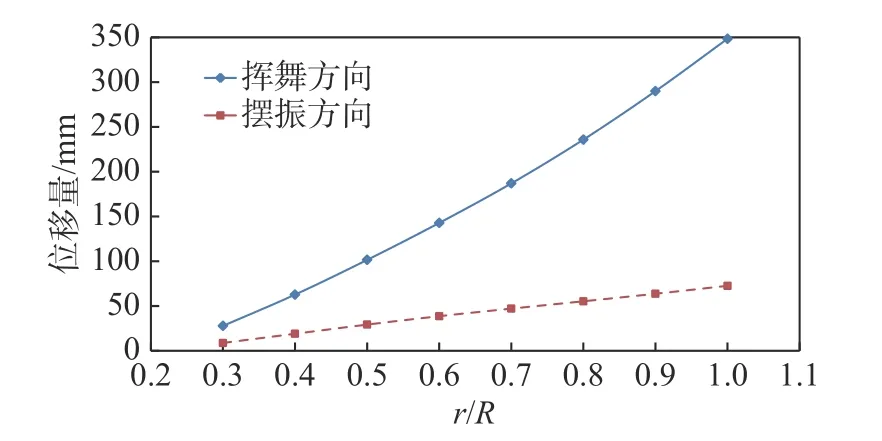
圖11 揮舞方向和擺振方向形變量分布Fig. 11 Distribution of blade deformation
3.3 旋翼氣動(dòng)力分析
圖12 分別用剛性槳葉模型和彈性槳葉模型計(jì)算了懸停狀態(tài)下槳葉升力展向分布,圖中縱坐標(biāo)為單位長(zhǎng)度的截面升力。從圖中可以看出,槳葉的形變并沒(méi)有改變升力展向分布趨勢(shì)。進(jìn)一步對(duì)比后發(fā)現(xiàn),考慮彈性形變的槳葉內(nèi)側(cè)產(chǎn)生略大的升力,槳葉外側(cè)的升力略小。配平相同拉力系數(shù)Camrad Ⅱ采用剛性槳葉模型計(jì)算得到的總距操縱量為9.63°,彈性槳葉模型對(duì)應(yīng)的操縱為10.41°,操縱量的不同是由于槳葉形變帶來(lái)氣動(dòng)力變化導(dǎo)致的。從圖10 可以看出,考慮槳葉彈性形變后,槳葉外側(cè)區(qū)域的迎角減小,導(dǎo)致槳尖部分升力減小。為了保持拉力系數(shù)不變,總距操縱量相應(yīng)提高,最終產(chǎn)生了如圖12 所示的升力分布。
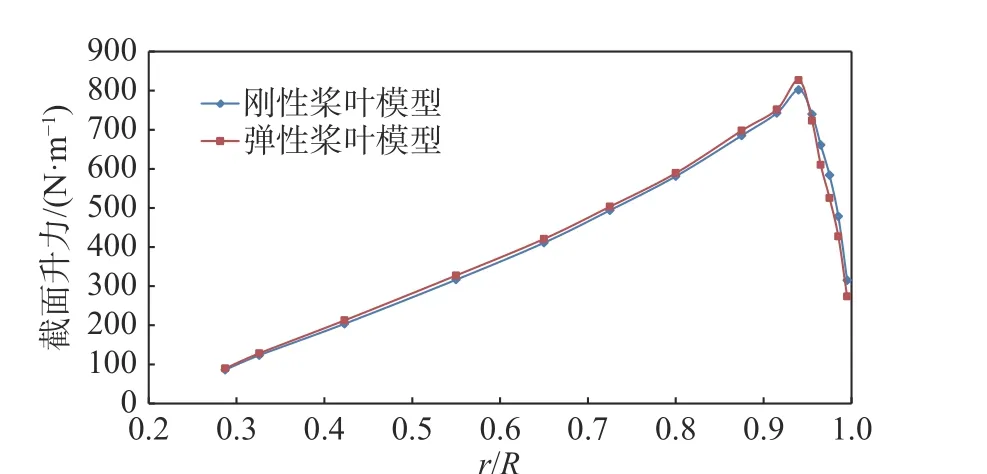
圖12 槳葉展向升力分布Fig. 12 Blade lift along the spanwise direction
3.4 旋翼噪聲特性分析
圖13 給出了不同方法計(jì)算得到的旋翼懸停狀態(tài)氣動(dòng)總噪聲輻射特性。方法1 進(jìn)行載荷計(jì)算時(shí)采用Camrad Ⅱ的剛性槳葉模型,槳葉網(wǎng)格采用基準(zhǔn)外形,即未考慮彈性形變影響;方法2 進(jìn)行載荷計(jì)算時(shí)采用的Camrad Ⅱ的彈性槳葉模型,槳葉網(wǎng)格采用基準(zhǔn)外形,即僅考慮槳葉彈性形變引起的載荷變化;方法3(本文方法)進(jìn)行載荷計(jì)算時(shí)采用的Camrad Ⅱ的彈性槳葉模型,槳葉網(wǎng)格采用形變后外形,即兼顧槳葉形變引起的外形變化和載荷變化。從圖13 中可以看出,三種計(jì)算方法得到的噪聲輻射方向特性是完全一致的,隨著槳盤(pán)夾角的增大,總噪聲呈現(xiàn)先增大后減小的趨勢(shì),在槳盤(pán)夾角20°處噪聲級(jí)達(dá)到峰值。槳葉形變沒(méi)有改變旋翼懸停氣動(dòng)噪聲的方向特性。槳盤(pán)夾角0°~30°區(qū)域的噪聲級(jí)較大,為旋翼氣動(dòng)噪聲的主要傳播方向。圖14 顯示的是三種方法計(jì)算得到的厚度噪聲差值對(duì)比。從“方法2 減去方法1”的曲線可以看出,兩種方法的厚度噪聲基本無(wú)差異。相比于前兩種方法,方法3 考慮槳葉外形形變之后,在槳盤(pán)平面以外區(qū)域的厚度噪聲均有所降低,在噪聲的主要傳播方向上,噪聲變化量在0.15 dB 以內(nèi)。在槳盤(pán)夾角70°觀測(cè)點(diǎn)處,噪聲差值達(dá)到了-0.3 dB,但該觀測(cè)點(diǎn)位于非主要傳播方向上,對(duì)總噪聲影響很小。

圖13 不同方法計(jì)算得到的總噪聲輻射特性Fig. 13 Total in-hover noise obtained by different numerical methods
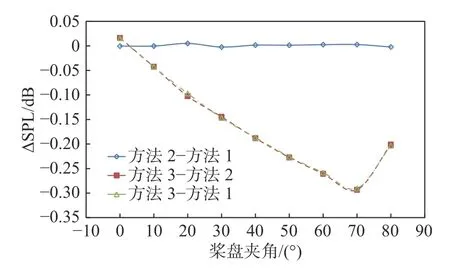
圖14 不同方法計(jì)算得到的厚度噪聲差值Fig. 14 Difference of the thickness noise between different methods
考慮形變后旋翼厚度噪聲的變化較小,這是因?yàn)楹穸仍肼暿怯蓸~旋轉(zhuǎn)運(yùn)動(dòng)排開(kāi)空氣而產(chǎn)生的。從公式(2)可以看出,影響厚度噪聲的因素主要是槳葉旋轉(zhuǎn)速度和運(yùn)動(dòng)速度。因此,扭轉(zhuǎn)變化和總距變化對(duì)厚度噪聲影響較小。
圖15 顯示的是三種方法計(jì)算得到的載荷噪聲差值對(duì)比。從圖中可以看出,相比于方法1,后兩種方法考慮彈性形變引起的載荷變化后,載荷噪聲在所有觀測(cè)點(diǎn)均有所增大,在槳盤(pán)平面內(nèi)的載荷噪聲增大約1.0 dB。方法2 與方法3 計(jì)算得到的載荷噪聲存在一定差異,差值能夠達(dá)到-0.3 dB,說(shuō)明載荷噪聲并非只與載荷相關(guān),還受到槳葉外形變化的影響,精確載荷計(jì)算不足以包含槳葉形變帶來(lái)的全部影響。
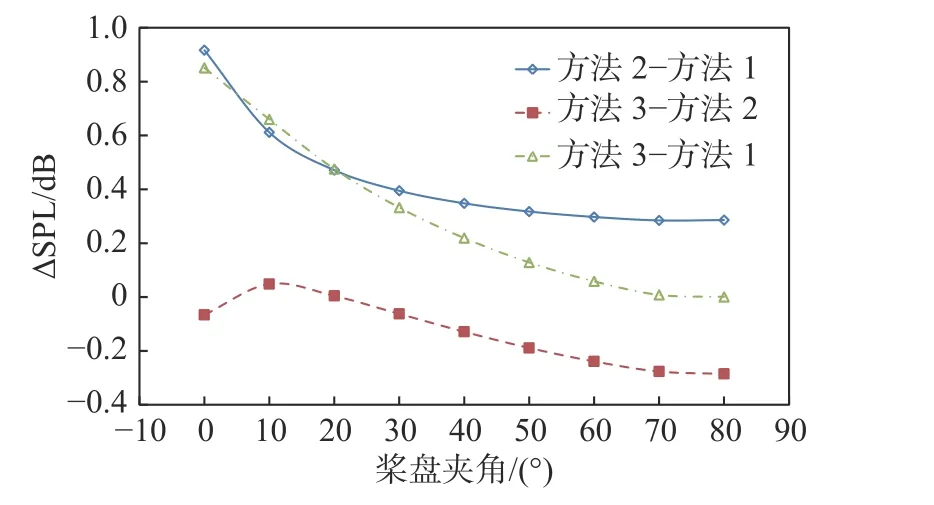
圖15 不同方法計(jì)算得到的載荷噪聲差值Fig. 15 Difference of the loading noise between different methods
圖16 顯示的是三種方法計(jì)算得到的總噪聲差值對(duì)比。從圖中可以看出,相比于方法1,方法2 的總噪聲在所有觀測(cè)點(diǎn)均有所增大,變化量在0.6 dB 以內(nèi)。相比于方法1,方法3 的總噪聲在所有觀測(cè)點(diǎn)均有所減小,變化量最大處位于槳盤(pán)平面內(nèi),此處噪聲差值為-1.0 dB。方法2 和方法3 的差異最為明顯,噪聲差值最大處位于槳盤(pán)平面內(nèi),此處噪聲差值為-1.5 dB。

圖16 不同方法計(jì)算得到的總噪聲差值Fig. 16 Difference of the total noise between different methods
圖17 計(jì)算了懸停狀態(tài)下槳盤(pán)平面內(nèi)觀測(cè)點(diǎn)處三種情況各類噪聲的時(shí)間歷程,圖中顯示的是單片槳葉旋轉(zhuǎn)周期內(nèi)的聲壓曲線。從圖中可以看出,槳葉形變對(duì)厚度噪聲和載荷噪聲聲壓時(shí)間歷程的幅值和相位均有一定影響,進(jìn)而導(dǎo)致疊加后的總噪聲幅值和相位均不一致。圖18 計(jì)算了懸停狀態(tài)下最強(qiáng)觀測(cè)點(diǎn)處(槳盤(pán)夾角20°)三種情況各類噪聲的時(shí)間歷程,也存在與圖17 相似的結(jié)果。
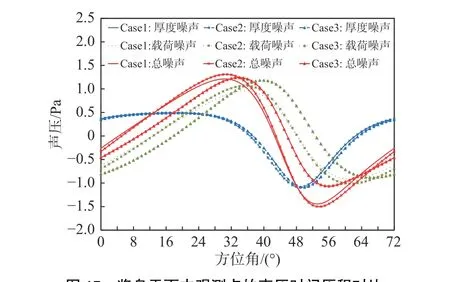
圖17 槳盤(pán)平面內(nèi)觀測(cè)點(diǎn)的聲壓時(shí)間歷程對(duì)比Fig. 17 Time histories of the sound pressure at an observation point in the rotor plane
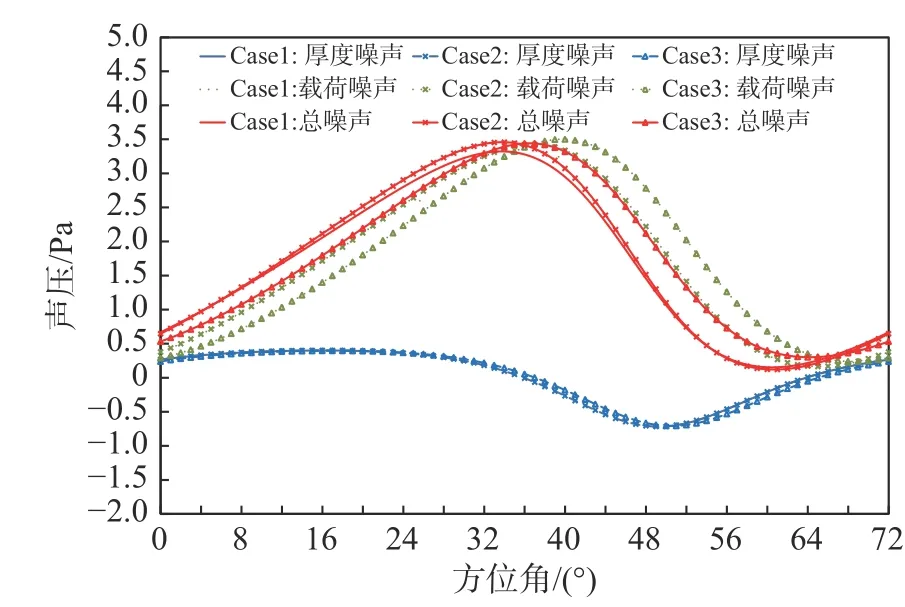
圖18 噪聲最強(qiáng)觀測(cè)點(diǎn)處的聲壓時(shí)間歷程對(duì)比Fig. 18 Time histories of the sound pressure at the observation point with the strongest noise
結(jié)合圖14、圖15 和圖16 來(lái)看,在噪聲最主要傳播方向上(槳盤(pán)夾角20°),方法1 與方法3 的厚度噪聲和載荷噪聲的差值分別為-0.1 dB 和0.47 dB,但疊加后的總噪聲基本沒(méi)有差別。針對(duì)槳盤(pán)平面內(nèi)的觀測(cè)點(diǎn),方法2 與方法3 的厚度噪聲和載荷噪聲差值均非常小,但總噪聲差值卻達(dá)到了-1.5 dB。從圖17 和圖18 中可以看出,厚度噪聲和載荷噪聲疊加計(jì)算總噪聲時(shí)要同時(shí)考慮幅值和相位,聲波相位的干涉可能對(duì)總噪聲幅值產(chǎn)生較大影響。這種聲波相位干涉在本文分析中是普遍存在的。在對(duì)噪聲進(jìn)行預(yù)測(cè)時(shí),噪聲幅值與相位均要精確預(yù)測(cè),尤其是想要利用相位相消原理進(jìn)行噪聲控制時(shí),更應(yīng)該考慮槳葉彈性形變引起的外形變化和載荷變化。
4 結(jié) 論
通過(guò)本文研究,發(fā)現(xiàn)采用Camrad II 的彈性槳葉模型能夠正確預(yù)估懸停狀態(tài)下槳葉的彈性形變量,具有較好的可靠性。計(jì)算結(jié)果表明:
1)在典型工作狀態(tài)下,旋翼槳葉會(huì)發(fā)生明顯的彈性形變,扭轉(zhuǎn)率從-12°/R近乎變?yōu)?13°/R,揮舞方向形變量約0.8 倍弦長(zhǎng),明顯大于擺振方向形變量。
2)槳葉形變不會(huì)改變旋翼懸停氣動(dòng)噪聲的方向特性,但會(huì)改變厚度噪聲和載荷噪聲聲壓時(shí)間歷程中的幅值和相位,進(jìn)而導(dǎo)致總噪聲幅值改變。相較而言,槳葉形變對(duì)厚度噪聲影響較小,對(duì)載荷噪聲影響較大。
致謝:感謝中國(guó)空氣動(dòng)力研究與發(fā)展中心唐敏、左承林、尹星繁等人協(xié)助完成模型旋翼風(fēng)洞試驗(yàn)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
 空氣動(dòng)力學(xué)學(xué)報(bào)2022年5期
空氣動(dòng)力學(xué)學(xué)報(bào)2022年5期
- 空氣動(dòng)力學(xué)學(xué)報(bào)的其它文章
- 基于優(yōu)化概率神經(jīng)網(wǎng)絡(luò)的飛機(jī)結(jié)冰情況識(shí)別
- 高效率采樣的數(shù)據(jù)關(guān)聯(lián)融合氣動(dòng)力建模方法
- 融合物理的神經(jīng)網(wǎng)絡(luò)方法在流場(chǎng)重建中的應(yīng)用
- 面向錯(cuò)位裝配體的自動(dòng)曲面嵌入算法
- 旋翼流動(dòng)的塊結(jié)構(gòu)化網(wǎng)格自適應(yīng)方法
- 闊葉林風(fēng)場(chǎng)特性及風(fēng)致動(dòng)力響應(yīng)的現(xiàn)場(chǎng)實(shí)測(cè)研究