一種車輛線控制動系統扭矩分配控制方法*
2022-10-27 06:49:40王晶
汽車電器 2022年10期
王 晶
(廊坊職業技術學院 機電工程系,河北 廊坊 065000)
當前形勢下,發展新能源汽車,尤其是具有零污染、零排放的純電動汽車,不僅對中國能源安全、環境保護具有重大意義,同時也是中國汽車領域實現轉型升級、技術突破的重要方向。
當前國內外的純電動汽車大多數采用電動真空泵為制動助力系統提供真空源,并通過液壓制動系統最終實現制動功能,這種控制方案具有成熟度高的特點,但電動真空泵與真空罐作為附加機構安裝于車輛的制動線路上,增加了制動系統的結構復雜度以及整體可靠性,同時也限制了系統性能的提高,針對這一問題,線控制動系統成為當前國內外純電動汽車領域的研究熱點。線控制動系統,制動踏板不再與制動缸直接相連,駕駛員的制動操作由傳感器采集作為控制意圖,完全或部分由液壓執行器來完成制動操作,彌補了傳統制動系統設計和原理所導致的不足,使制動控制得到最大的自由度。
純電動汽車由電機驅動,在車輛制動工況下能夠通過電機能量回收產生部分制動扭矩,同時為動力電池充電。在駕駛員執行制動操作時,能量回收與線控制動系統均會產生制動力矩,但基于線控制動系統的純電動汽車制動過程中制動力矩的合理高效分配方法目前國內外均無成熟解決方案。
針對以上問題,本文提出了一種適用于純電動車輛的線控制動系統扭矩分配控制方法。該方法首先根據制動踏板狀態解析駕駛員的制動需求并獲得需求制動扭矩,之后根據電池與電機狀態計算電機最大制動功率,在此基礎上分配電機系統與液壓系統的制動扭矩。本文充分考慮到液壓系統由于溫度、部件機械特性等因素影響其輸出制動力的穩定性與準確性問題,結合驅動電機動態響應速度快的特點,通過調節電機系統產生的制動扭矩對液壓系統輸出的制動力進行補償,保證最終作用在車輛中的制動力矩與駕駛員需求保持一致。
1 線控液壓制動系統構架
純電動汽車線控液壓制動系統構架如圖1所示。其中,制動踏板系統將駕駛員的制動意圖轉換為電信號,并將該電信號處理后通過1發送給整車控制器;電池管理系統將此時動力電池的工作狀態通過2發送給整車控制器,其中包括故障信息、電池允許最大充放電功率、電池SOC等;整車控制器在接收到以上信息后首先對制動信號進行解析并得到需求制動扭矩,在此基礎上通過判斷電池狀態將需求制動扭矩分別通過3、4分配給驅動電機與液壓制動單元,其中電機部分的需求扭矩通過能量回收實現;之后驅動電機與液壓制動單元按照需求扭矩對車輛實施制動操作;最后車輛通過6向整車控制器反饋車速狀態,整車控制器判斷制動是否達到預期,若未達到預期則對扭矩分配進行調整,最終實現對車輛制動過程的控制。
圖2為圖1中所提到的液壓制動單元,該系統在控制器接收到需求制動扭矩后,通過控制電機、液泵等系統實現制動液流入、流出制動輪缸,最終達到對制動扭矩的控制。
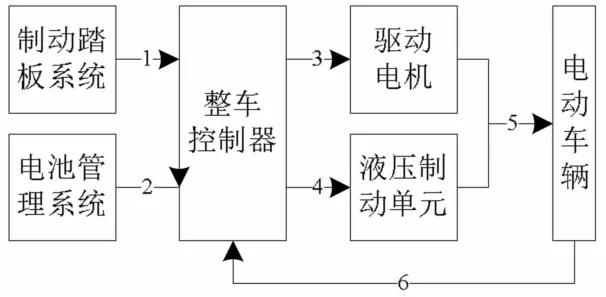
圖1 線控液壓制動系統構架
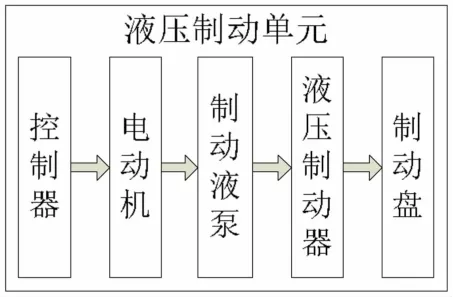
圖2 液壓制動單元構架
2 需求扭矩計算
對制動扭矩進行分配前首先需要獲得需求扭矩,即整車控制器根據制動踏板信息分析駕駛員的制動意圖,在此基礎上得到需求制動扭矩并應用于后續控制,可以看出計算需求扭矩是進行制動扭矩分配的前提。
如圖3所示,需求扭矩計算由兩部分組成,分別為制動踏板信號處理與需求制動扭矩計算;其中整車控制器采集兩路制動踏板信號,之后對其進行歸一化處理、信號權重分配與死區滯環處理,最終得到踏板開度信息與故障信息;接下來需求制動扭矩計算部分結合以上信息與車輛狀態通過查表得到需求扭矩值。
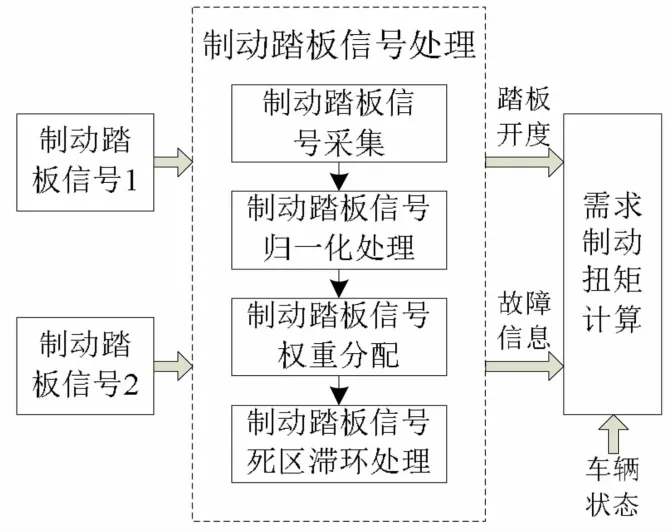
圖3 需求制動扭矩計算方法
3 需求制動扭矩分配
在得到需求制動扭矩后需要對其進行分配,將需求扭矩分配給電機與液壓制動單元,其中電機通過能量回收方式產生制動扭矩;扭矩分配的目的在于通過合理分配最終實現在最大限度回收制動能量的基礎上保證車輛制動功能的可靠實現。電機最大能量回收扭矩計算如圖4所示。
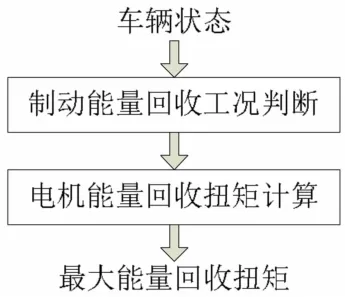
圖4 電機最大能量回收扭矩計算
首先判斷是否允許車輛進入制動能量回收工況,具體如下:①車輛擋位為前進擋;②整車無斷高壓及不可恢復零扭矩故障;③制動踏板被踩下,對應制動踏板開度大于閾值K;④加速踏板處于釋放狀態,對應加速踏板開度小于閾值K。
當以上4個條件全部得到滿足時則認為車輛能夠進入制動能量回收工況,即允許車輛進行能量回收,其中閾值K與K考慮了制動踏板與加速踏板機械死區特性對工況判斷的潛在影響。
接下來進行電機最大能量回收扭矩計算,計算方法見式(1):
式中:T——電機最大能量回收扭矩;P——電機最大允許發電功率;P——電池最大允許充電功率;η——電機發電效率;ω——電機轉速;T——電機最大允許發電扭矩,由式(1)可得到最大能量回收扭矩。為保護電機與動力電池,不應讓其在極限值工作,為此引入扭矩余量。

式中:ΔT——扭矩余量;T——電機制動扭矩(發電扭矩)最大值。
由式(2)可以看出,ΔT的引入保證了電機與動力電池不工作在極限狀態,因此對電機與電池起到了保護作用。
接下來對扭矩進行分配,定義T為電機分配得到的能量回收(發電)扭矩,計算方法如下:

式中:K——電機能量回收系數,該值小于1,其目的在于為后續的能量回收扭矩的微調提供調節余量。
定義T為液壓制動單元分配得到的制動扭矩,計算方法如下:

式中:T——之前計算得到的需求制動扭矩。
由式(4)可以得到,當T≤T時,完全依靠電機的能量回收產生制動扭矩,當T>T時液壓制動單元才開始介入,并產生制動扭矩。
式(3)與式(4)完成了制動扭矩的分配,考慮到液壓控制單元在執行制動扭矩命令時的誤差,或一些特殊工況下(下坡)在施加制動扭矩后車輛產生的減速度低于預期,針對這一情況,設計調整策略,通過調節電機的能量回收扭矩對其進行補償,從而使車輛達到預期制動效果,具體方法如下。
如圖5所示,系統輸入為需求制動扭矩T,分配到液壓制動單元與電機的制動扭矩分別為T與T;之后液壓制動單元與電機按照扭矩命令分別對車輛產生制動扭矩;在制動扭矩的作用下車輛產生減加速度,利用制動扭矩估算模塊估算作用在車輛上的制動扭矩,令估算扭矩為T;用需求制動扭矩T減去該值后得到偏差扭矩,該偏差扭矩經過偏差處理模塊后得到補償扭矩T;利用T對T進行補償,最終保證車輛能夠產生預期的減速度。
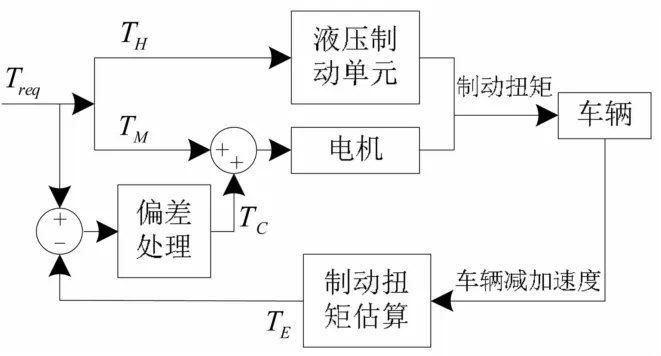
圖5 電機最大能量回收扭矩計算
其中,制動扭矩估算通過查表實現,前期通過在無風、干燥平直的鋪裝路面下進行實車測試,通過實車標定得到不同車速及給定制動扭矩條件下車輛產生的減加速度值,將實驗數據制成查詢表,輸入為車輛減加速度與車輛速度,輸出為估算的制動扭矩;在實際制動過程中通過查詢該表即可得到估算制動扭矩T。接下來介紹偏差處理模塊,T減去T得到偏差扭矩,令該值為ΔT,則補償扭矩T計算方法如下:

式(5)中,K為一大于0的正數,考慮到估算扭矩T與實際值必然會存在一定誤差,因此當ΔT<K時認為偏差扭矩在合理范圍內,不對其進行補償;另外該方法中ΔT>0表示車輛產生的減速度低于預期,根據式(5),當滿足ΔT≥K條件時T不為0,此時出于安全考慮對T進行補償,而ΔT<0則表示車輛產生的減速度高于預期,此時認為該減速度與駕駛員制動意圖不沖突,因此不對T進行補償;當滿足ΔT≥K條件時,通過查表法計算補償扭矩T,具體為通過前期實車標定得到ΔT與補償扭矩T的對應關系,在此基礎上制成一維查詢表,輸入為ΔT,輸出為T,在實際制動過程中通過查詢該表即可得到補償扭矩T,該扭矩不超過(1-K)·T。
4 仿真驗證
搭建Matlab/Simulink仿真環境,對本文所提出的控制方法進行仿真驗證。如圖6所示。
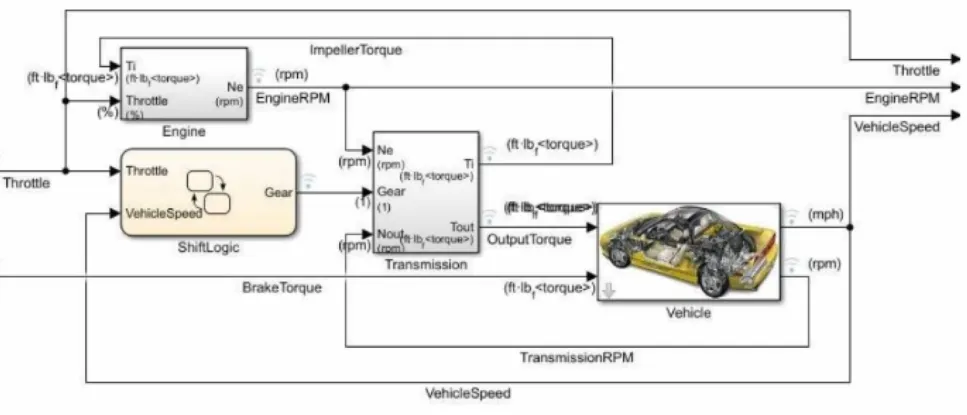
圖6 Matlab/Simulink仿真環境搭建
仿真環境包括加速踏板、制動踏板、液壓制動單元、驅動電機以及駕駛員模型等。其中駕駛員模型包括加速模型、制動模型。
圖7為駕駛員加速模型的輸出map,即駕駛員踩下加速踏板后的需求扭矩,其中X軸坐標為電機轉速,Y軸坐標為加速踏板開度。可以看出,在駕駛員踩下加速踏板后,根據當前的電機轉速便能夠唯一地確定一個扭矩值,該扭矩便為駕駛員的需求加速扭矩。
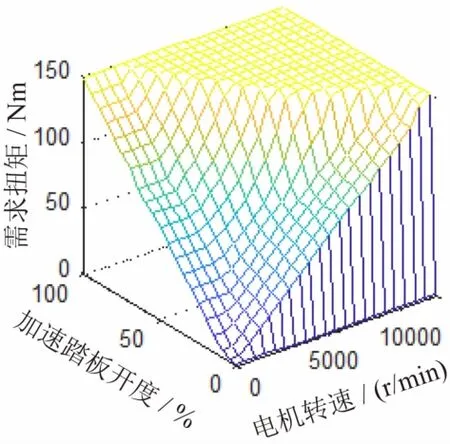
圖7 駕駛員加速模型
圖8為駕駛員制動模型的輸出map,即駕駛員踩下制動踏板后的需求扭矩輸出。可以看出,在駕駛員踩下制動踏板后,根據當前的電機轉速便能夠唯一地確定一個扭矩值,該扭矩便為駕駛員的需求制動扭矩。
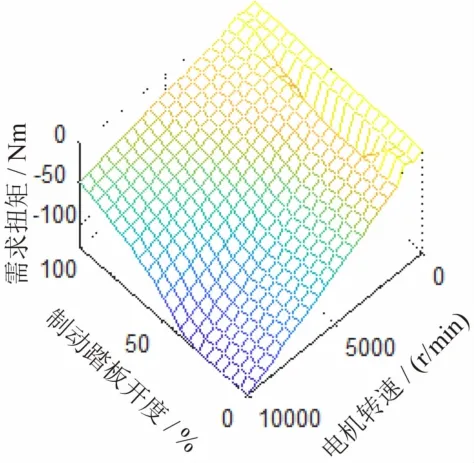
圖8 駕駛員制動模型
以車輛常規制動工況為例進行實驗仿真,對比單純使用液壓制動單元與本文所提出方法的制動效果。在時間等于4s時,駕駛員踩下制動踏板所產生的需求制動扭矩為-20Nm,根據圖9可以看出,在小制動力工況下,單純由液壓機構產生制動扭矩時,由于執行機構死區、非線性等因素的影響,此時液壓機構所產生的制動扭矩與實際需求偏差較大。
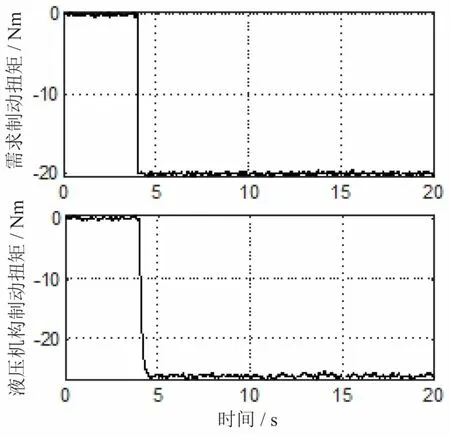
圖9 液壓機構產生制動扭矩圖
圖10為單純液壓制動控制與基于本文所提出扭矩分配控制過程中扭矩偏差的對比圖。其中單純由液壓機構所產生的制動扭矩與實際需求扭矩偏差超過了6Nm,而采用本文提出的扭矩分配控制方法,借助于驅動電機響應速度快的特點,制動過程中車輛實際制動扭矩與需求扭矩偏差低于1Nm。
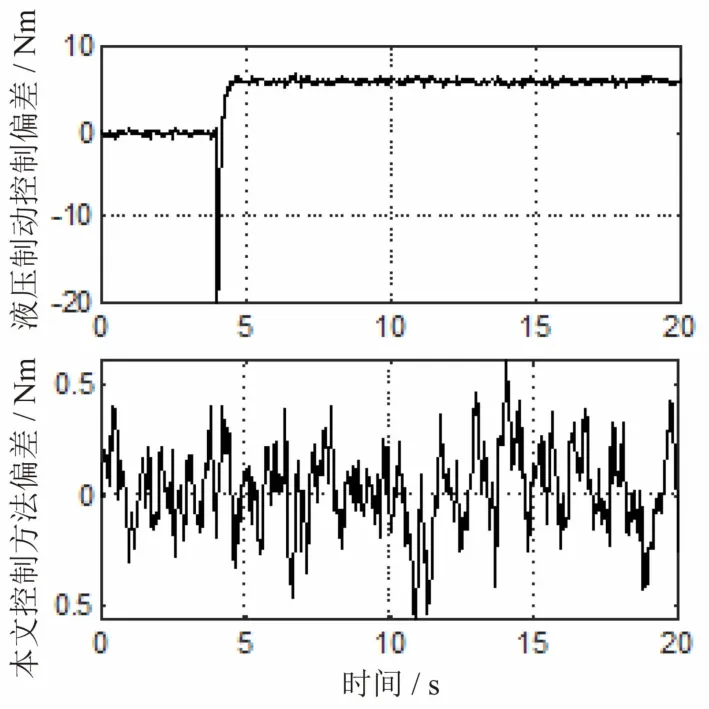
圖10 液壓制動控制與本文方法對比
5 結論
本文提供了一種適用于裝備線控液壓制動系統的純電動汽車在制動過程中電機回收制動扭矩與液壓制動扭矩的分配計算方法。該方法根據制動踏板的開度及變化狀態解析駕駛員的制動需求并計算得到需求制動扭矩,之后根據電池與電機狀態計算電機最大制動功率,在此基礎上分配電機系統與液壓系統的制動扭矩。考慮到液壓系統由于溫度、部件機械特性等因素影響其輸出的制動力矩穩定性與準確性,該方法通過調節電機系統產生的制動扭矩對其進行補償,保證最終作用在車輛中的制動力矩與駕駛員需求保持一致。最后通過搭建仿真環境對該控制方法的可行性及有效性進行了驗證。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
鐵道通信信號(2020年9期)2020-02-06 09:15:22
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
黃河之聲(2017年13期)2017-01-28 13:30:17
